
A Differentiated Dynamic Reactive Power Compensation Scheme for the Suppression of Transient Voltage Dips in Distribution Systems


Abstract
:1. Introduction
- (1)
- The configuration method employs transient voltage stability analysis to determine the ideal installation locations and capacities for dynamic reactive power compensation devices. It appropriately expands the referenced multi-binary table indexes and introduces a specialized index system for optimizing dynamic reactive power compensation device configurations. Furthermore, it establishes a model for differentiated compensation strategies, with enhancements made to the TLBO algorithm for effective model solving.
- (2)
- Within this configuration method, a differentiated compensation component is introduced, allowing for flexible adjustments based on the weights of optimal configuration objectives. These adjustments are made considering the varying levels of instability risk across different system regions and the unique characteristics of the reactive power compensation device types. In comparison with traditional methods, even with similar reactive power compensation results, this approach has the potential to reduce configuration costs and enhance overall economic efficiency.
2. Dynamic Reactive Device Configuration Index System Based on Multiple-Two-Element Notation
2.1. Multiple-Two-Element Notation Criterion
2.2. Indicator of Safety Margin for Integrated Transient Voltage Dips of the System
2.3. Set of Worst Failures
2.4. Regional Classification of the Risk of Transient Voltage Destabilization
2.5. Sensitivity Indicator
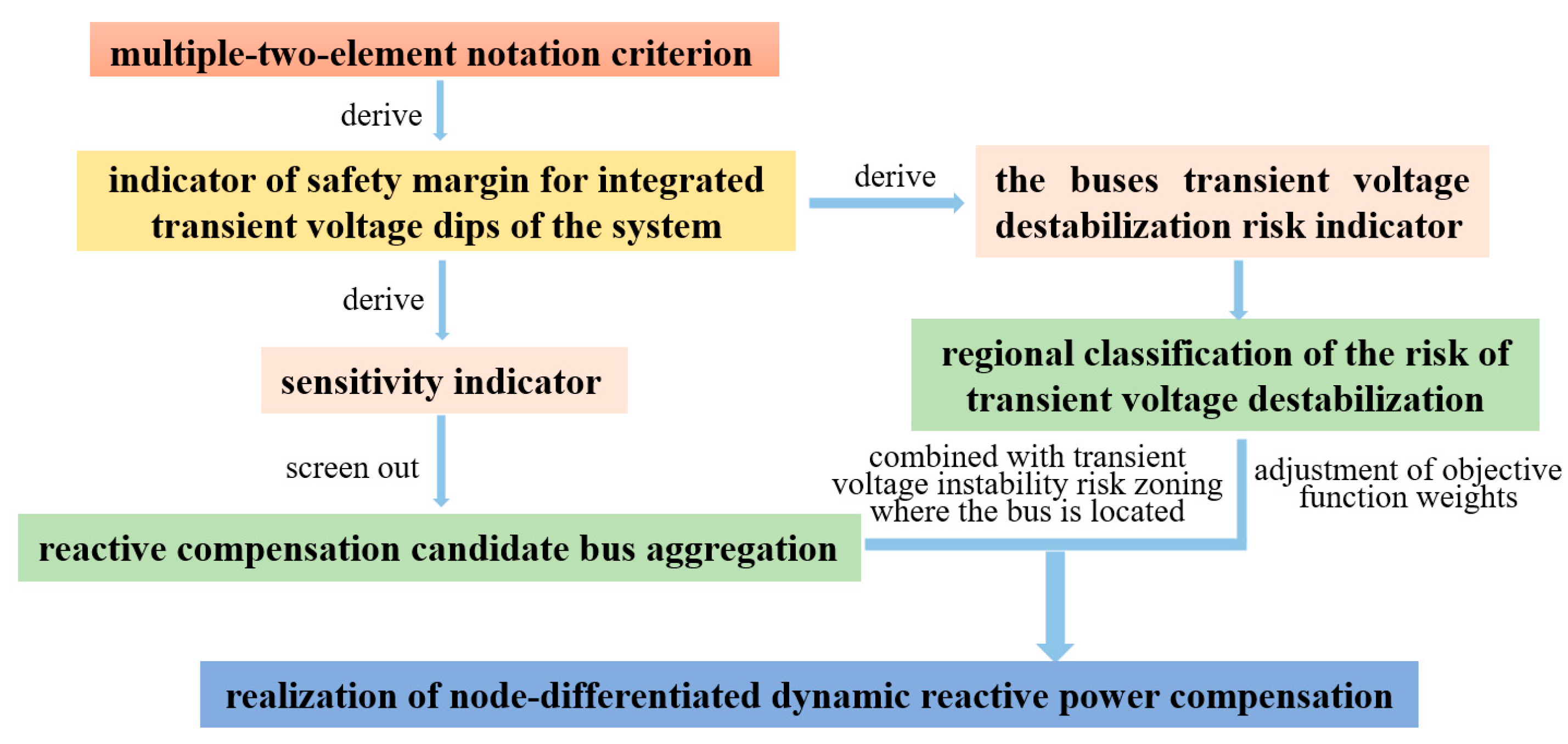
2.6. Relationship and Use of Indicators
3. Node-Differentiated Dynamic Reactive Power Compensation Models
3.1. Device Selection
3.2. Configuration Model
- (1)
- Objective function
- (2)
- Constraints
4. Solving Algorithm and Process
4.1. ETLBO Optimization Algorithm
- Initialization
- b.
- “Teaching” process
- c.
- “Self-learning” process
4.2. TOPSIS Evaluation Method
4.3. Solution Steps
- (1)
- Trend Calculation and Weight Coefficients: Initiate the algorithm by conducting trend calculations through PSD-BPA. Collect system trend information and calculate the weight coefficients for each bus.
- (2)
- N-1 Fault Scanning: Conduct N-1 fault scanning across the system. Calculate the integrated transient voltage instability risk DΓ,l for the system under the influence of pre-selected faults. Rank these risks to determine the benchmark scenario for reactive power planning, focusing on the most severe faults.
- (3)
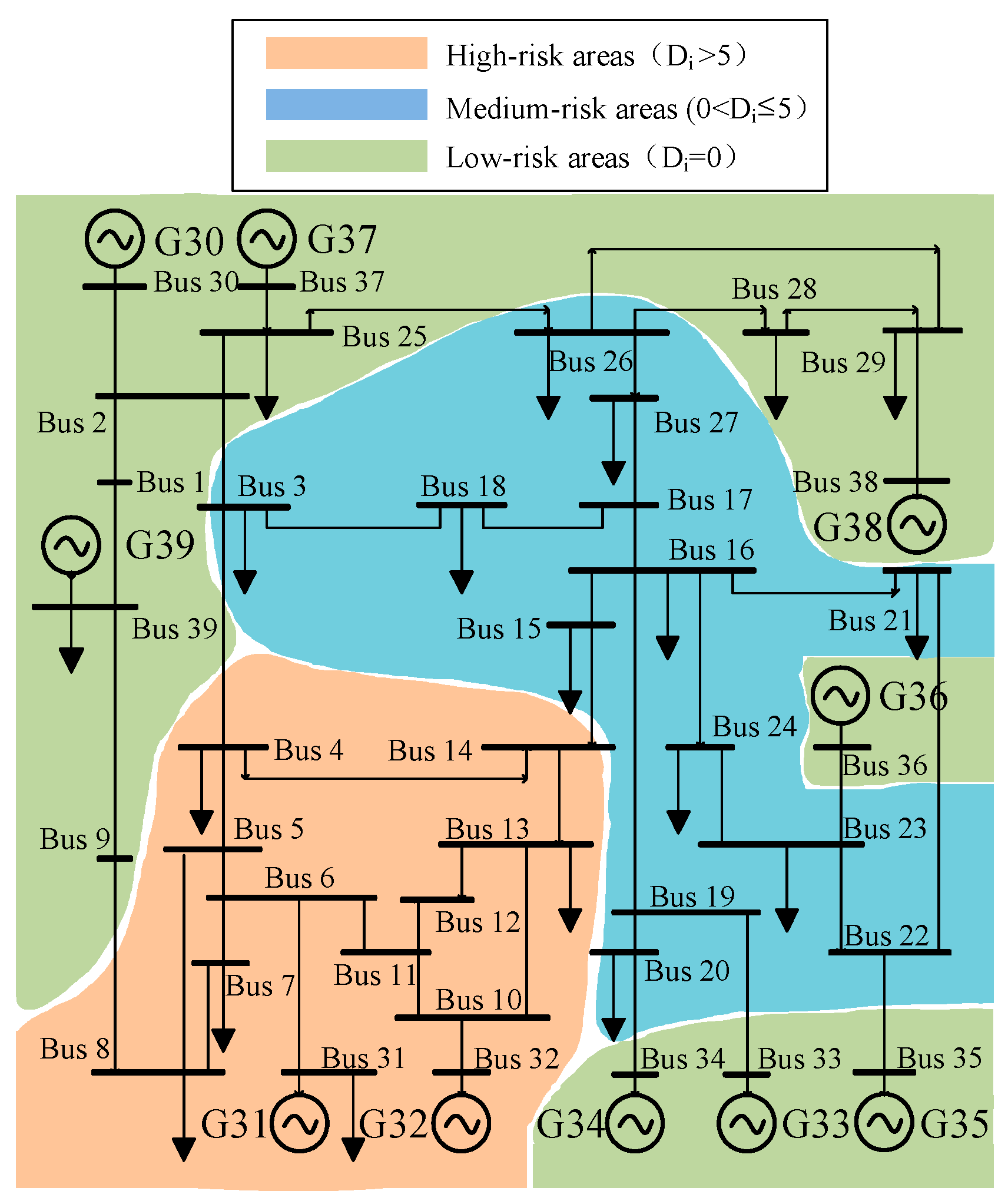
- Transient Voltage Instability Analysis: Perform time domain simulation analysis based on the benchmark scenario for the most severe fault. Calculate the transient voltage instability risk index Di for each node and categorize them into regions with varying levels of risk: high-, medium-, and low risk of transient voltage instability.
- (4)
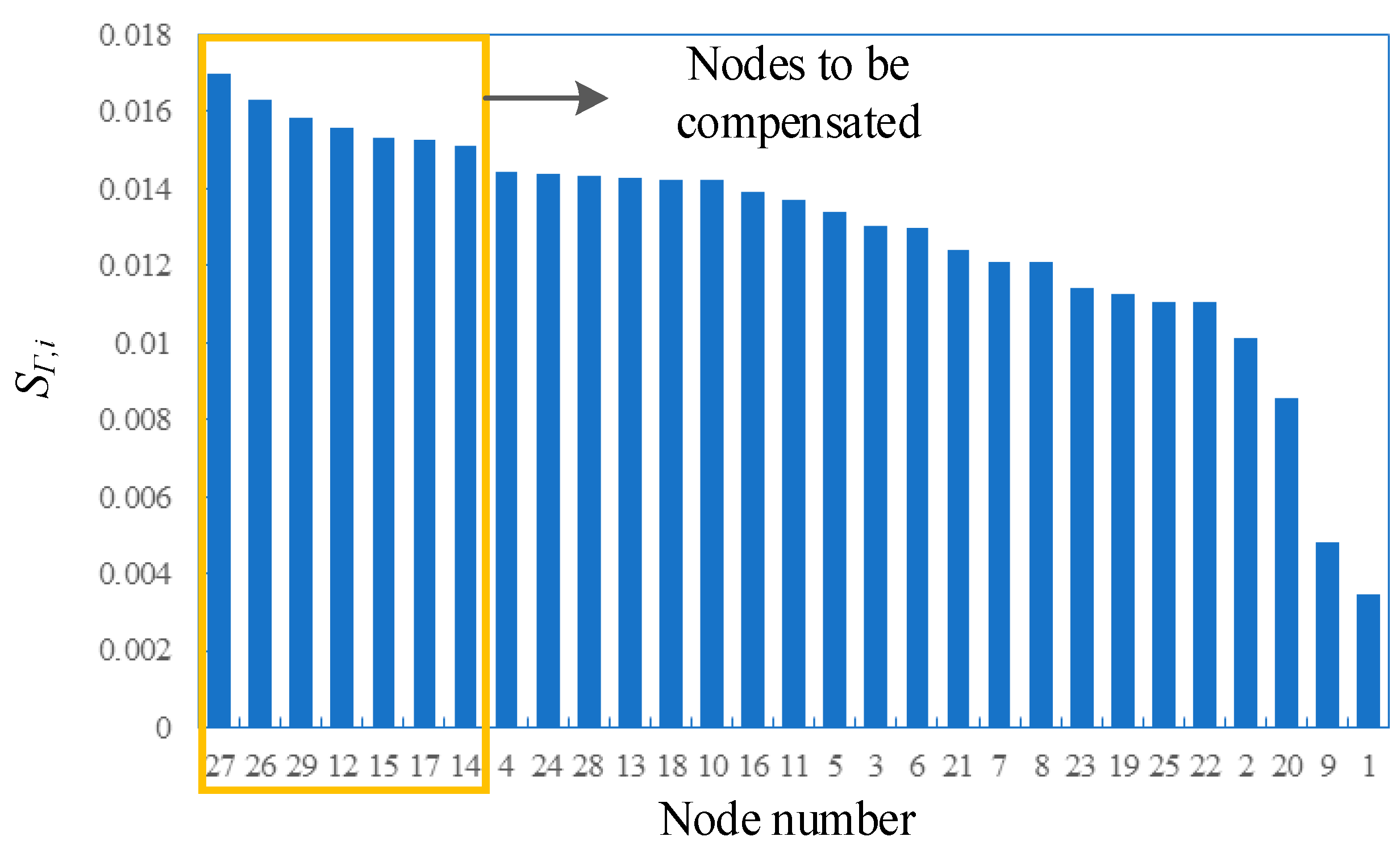
- Sensitivity Analysis: Continue with the most severe fault scenario and sequentially connect dynamic reactive power compensation devices of the same type and capacity to each node in the system. Conduct time domain simulation analysis and calculate the sensitivity index SΓ,i for each node. Construct a set of candidate nodes based on SΓ,i.
- (5)
- Candidate Node Determination: Based on the locations of the identified candidate nodes for reactive power compensation, determine the transient voltage instability risk regions they belong to. Combine the optimization weights for each selected reactive power compensation node. Encode the type and capacity of the dynamic reactive power compensation devices. Utilize optimization algorithms to differentially solve the problem and obtain a set of candidate solutions.
- (6)
- Evaluation and Selection: Utilize the TOPSIS evaluation decision method to assess the potential scenarios for configuring dynamic reactive power compensation devices under the established baseline scenario. Select the final scenario based on the evaluation results.
5. Example Analysis
5.1. Candidate Compensation Nodes
- (1)
- Filtering the set of worst failures
- (2)
- Candidate nodes
5.2. System Transient Voltage Instability Risk Partitioning
5.3. Configuration Results
6. Conclusions
- (1)
- A dynamic reactive device configuration index system based on multiple binary tables is proposed, and the corresponding differentiated dynamic reactive power compensation model is established under this system, which reduces the investment cost of reactive power compensation and increases the economic benefits.
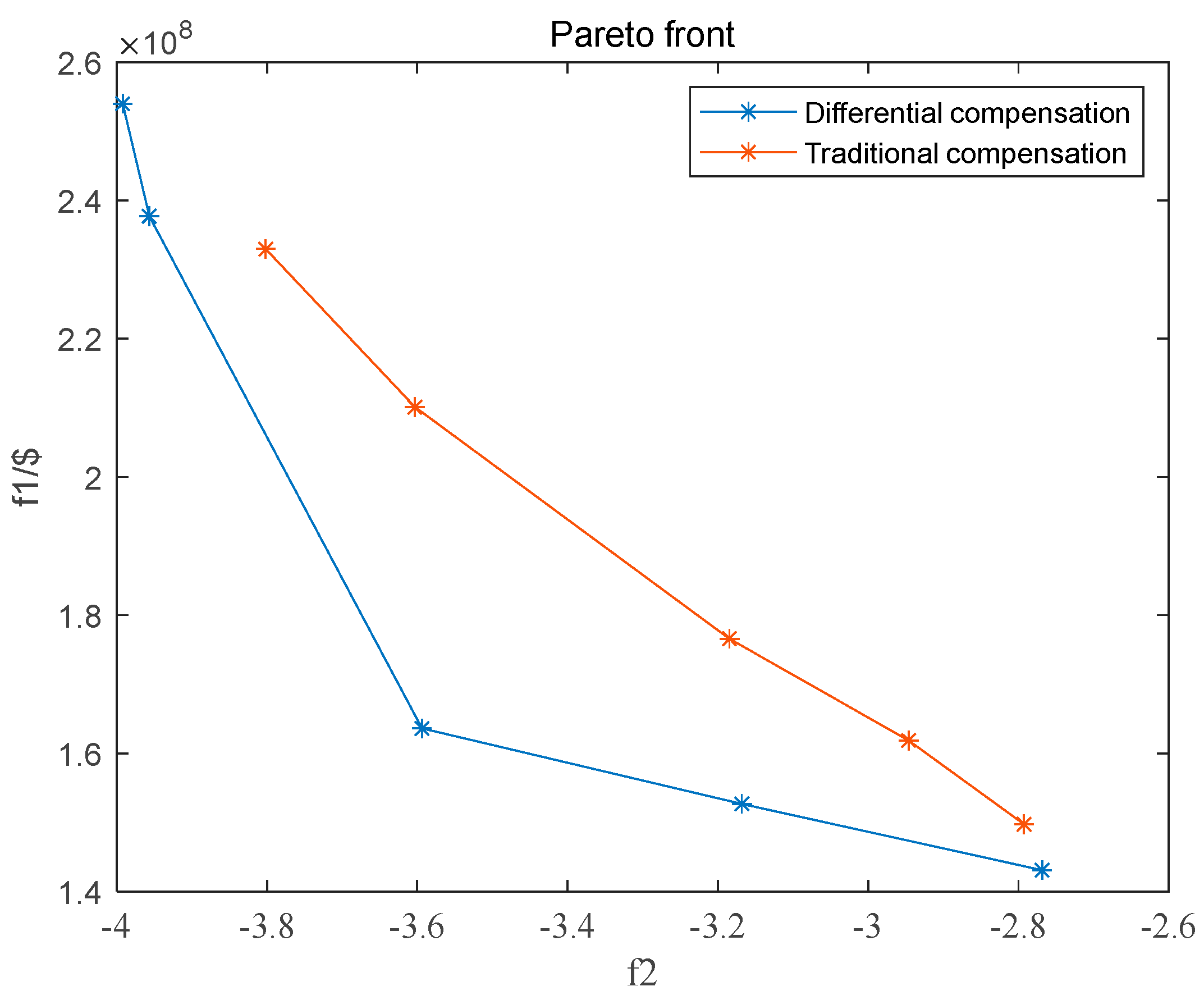
- (2)
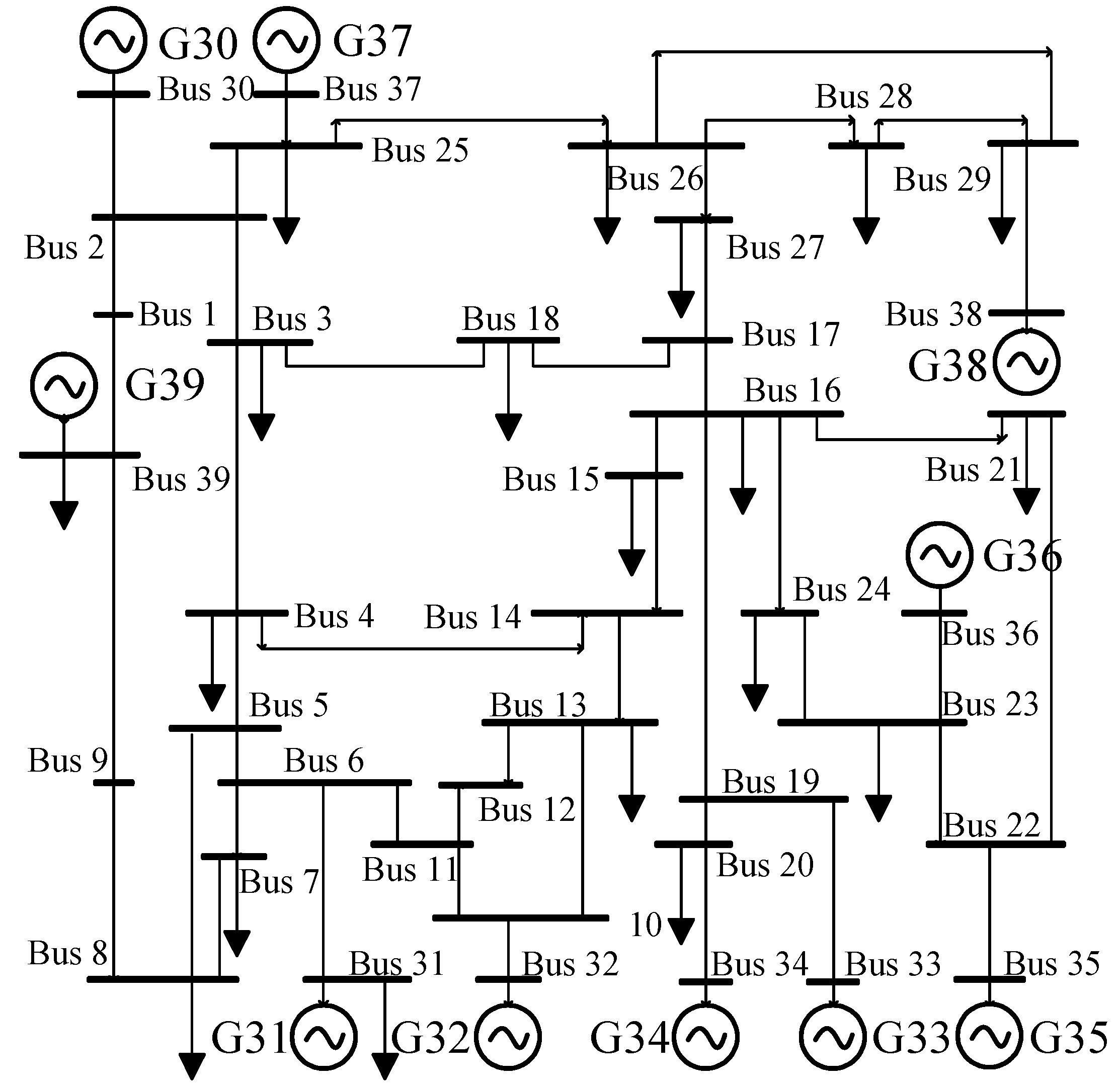
- The improved algorithm of ETLBO is used to optimize the model in the IEEE39 system, and the configuration scheme that satisfies the optimization objective is obtained. The TOPSIS evaluation method is used for evaluation and the optimal scheme 2 with the highest score is selected as the final scheme. Compared with the traditional method, the differentiated compensation method compensates similarly and reduces the cost by 22.13%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sami, M.; Gheorghe, S.; Toma, L. Transient stability improvement and voltage regulation in power system hosting Renewables by SVC. In Proceedings of the 2022 International Conference on Electrical, Computer and Energy Technologies (ICECET), Prague, Czech Republic, 20–22 July 2022; pp. 1–7. [Google Scholar]
- Opana, S.; Charles, J.K.; Nabaala, A. STATCOM Application for Grid Dynamic Voltage Regulation: A Kenyan Case Study. In Proceedings of the 2020 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 25–28 August 2020; pp. 1–5. [Google Scholar]
- Zhang, J.; Lin, W.; Zhang, B.; Mei, Y.; Li, J.; Wu, X.; Zhu, L. Research on Dynamic Reactive Power Compensation Configuration of High Proportion New Energy Grid. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 2002–2006. [Google Scholar]
- Zhang, Y.; Zhang, Y.; Jian, W.; Tang, F. Optimal Configuration Method of Dynamic Reactive Power Compensation Device Considering Reducing Commutation Failure Risk of Multi-infeed DC System. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; pp. 3233–3237. [Google Scholar]
- Cui, J. Research on Transient Voltage Characterization and Control of AC and DC Power Grids. Master’s Thesis, North China Electric Power University, Beijing, China, 2020. [Google Scholar]
- National Energy Administration. Technical Specification for Power System Safety and Stability Calculation; China Electric Power Press: Beijing, China, 2013; p. 15. [Google Scholar]
- China Southern Power Grid Co. Guidelines for Calculation and Analysis of Safety and Stability of the Southern Power Grid; China Southern Power Grid Co.: Guangzhou, China, 2009; p. 8. [Google Scholar]
- Overbye, T.J.; Klump, R.P. Effective Calculation of Power System Low-Voltage Solutions. IEEE Trans. 1996, 11, 75–82. [Google Scholar] [CrossRef]
- Wildenhues, S.; Rueda, J.L.; Erlich, I. Optimal allocation and sizing of dynamic var sources using heuristic optimization. IEEE Trans. Power Syst. 2015, 30, 2538–2546. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, Y.; He, H. A practical site selection method for dynamic reactive power compensation in multi-infeed DC power grid. Power Syst. Technol. 2014, 38, 1753–1757. [Google Scholar]
- Xue, A.; Zhou, J.; Liu, R. Research on practical transient voltage stability margin index using multiple binary table criterion. Chin. J. Electr. Eng. 2018, 38, 4117–4125+4317. [Google Scholar]
- Liu, Z.; Zhang, Q.; Wang, Y. Research on reactive power compensation measures to improve the safety and stability level of 750 kV sending end power grid in Northwest New Ganqing. Chin. J. Electr. Eng. 2015, 35, 1015–1022. [Google Scholar]
- Xu, Y.; Jiang, W.; Sun, S. Quantitative assessment method of transient voltage in distribution network containing high penetration wind power. China Electr. Power 2022, 55, 152–162. [Google Scholar]
- Xu, Z.; Chen, Y.; Zhai, B.; Chen, G.; Yang, Q.; Chen, J. A Comparative Study of the Virtual Synchronous Compensator on the Voltage Stability Enhancement. In Proceedings of the International Conference on Renewable Energies and Smart Technologies (REST), Tirana, Albania, 28–29 July 2022; pp. 1–5. [Google Scholar]
- Eltamaly, A.M.; El-Sayed, A.-H.M.; Mohamed, Y.S.; Elghaffar, A.N.A. A Modified Techniques of Transmission System by Static Var Compensation (SVC) for Voltage Control. In Proceedings of the 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), Manama, Bahrain, 15–17 April 2019; pp. 1–5. [Google Scholar]
- Yarlagadda, V.; Garikapati, A.K.; Gadupudi, L.; Kapoor, R.; Veeresham, K. Comparative Analysis of STATCOM and SVC on Power System Dynamic Response and Stability Margins with time and frequency responses using Modelling. In Proceedings of the 2022 International Conference on Smart Technologies and Systems for Next Generation Computing (ICSTSN), Villupuram, India, 25–26 March 2022; pp. 1–8. [Google Scholar]
- Mourad, A.; Youcef, Z. Wheeled Mobile Robot Path Planning and Path Tracking in a static environment using TLBO AND PID-TLBO control. In Proceedings of the 2022 IEEE 21st international Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 19–21 December 2022; pp. 116–121. [Google Scholar]
- Valluru, H.V.; Khandavilli, S.; Sela, N.C.; rao Thota, P.; Muktevi, L.V. Modified TLBO Technique for Economic Dispatch Problem. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS) 2018, Madurai, India, 14–15 June 2018; pp. 1970–1973. [Google Scholar]
- Arif, Y.M.; Nugroho, S.M.S.; Hariadi, M. Selection of Tourism Destinations Priority using 6AsTD Framework and TOPSIS. In Proceedings of the 2019 International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 5–6 December 2019; pp. 346–351. [Google Scholar]
- Zhou, S.; Zhu, L.; Guo, X. Power System Voltage Stability and Its Control; China Electric Power Press: Beijing, China, 2004. [Google Scholar]
- Xia, C.; Yang, Z.; Zhou, B. Analysis of commutation failure in multi-infeed HVDC system under different load models. Power Syst. Prot. Control. 2015, 43, 76–81. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Synchronous Compensator | SVC | STATCOM |
|---|---|---|---|
| Response time | 20 ms | 20–60 ms | <10 ms |
| Active Loss | 1.5–5% | 0.8% | 1% |
| Overload capacity | strong | weak | weak |
| Reactive power characteristics | low influence by voltage | proportional to voltage squared | proportional to voltage |
| Footprint | about 1/3 of SVC | large | about 1/3 of SVC |
| Investment cost | high | low | low |
| O and M costs | high | low | low |
| Failure Number | DΓ,l | Failure Number | DΓ,l | Failure Number | DΓ,l |
|---|---|---|---|---|---|
| 1 | 0.0909 | 17 | 0.9490 | 33 | 0.2714 |
| 2 | 0.0796 | 18 | 0.9148 | 34 | 1.7133 |
| 3 | 0.4212 | 19 | 0.7055 | 35 | 0.8796 |
| 4 | 0.4380 | 20 | 0.8705 | 36 | 0.3278 |
| 5 | 0.6902 | 21 | 0.9528 | 37 | 0.5423 |
| 6 | 0.4949 | 22 | 0.6184 | 38 | 0.6378 |
| 7 | 0.8572 | 23 | 0.6772 | 39 | 0.3311 |
| 8 | 0.8787 | 24 | 0.8356 | 40 | 0.2553 |
| 9 | 0.9739 | 25 | 0.6696 | 41 | 0.3781 |
| 10 | 0.8299 | 26 | 0.4717 | 42 | 0.2440 |
| 11 | 0.8614 | 27 | 0.5254 | 43 | 0.1699 |
| 12 | 0.9562 | 28 | 0.5051 | 44 | 0.2006 |
| 13 | 0.7955 | 29 | 0.3624 | 45 | 0.2976 |
| 14 | 0.3163 | 30 | 0.3121 | 46 | 0.3557 |
| 15 | 0.0928 | 31 | 0.3784 | ||
| 16 | 0.9501 | 32 | 0.2797 |
| Nodal | Γ | SΓ,i | Nodal | Γ | SΓ,i |
|---|---|---|---|---|---|
| 1 | −5.48855 | 0.003469 | 16 | −4.96675 | 0.013905 |
| 2 | −5.15575 | 0.010125 | 17 | −4.8989 | 0.015262 |
| 3 | −5.0114 | 0.013012 | 18 | −4.9498 | 0.014244 |
| 4 | −4.9407 | 0.014426 | 19 | −5.09815 | 0.011277 |
| 5 | −4.99185 | 0.013403 | 20 | −5.23305 | 0.008579 |
| 6 | −5.0139 | 0.012962 | 21 | −5.04085 | 0.012423 |
| 7 | −5.05725 | 0.012095 | 22 | −5.10995 | 0.011041 |
| 8 | −5.05815 | 0.012077 | 23 | −5.0916 | 0.011408 |
| 9 | −5.4201 | 0.004838 | 24 | −4.94405 | 0.014359 |
| 10 | −4.9501 | 0.014238 | 25 | −5.1098 | 0.011044 |
| 11 | −4.97635 | 0.013713 | 26 | −4.84815 | 0.016277 |
| 12 | −4.8839 | 0.015562 | 27 | −4.8134 | 0.016972 |
| 13 | −4.947 | 0.0143 | 28 | −4.9461 | 0.014318 |
| 14 | −4.9066 | 0.015108 | 29 | −4.8698 | 0.015844 |
| 15 | −4.89625 | 0.015315 |
| Nodal | Di | Number of Instabilities | Nodal | Di | Number of Instabilities | Nodal | Di | Number of Instabilities |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.0000 | 0 | 14 | 16.7118 | 6 | 27 | 1.7394 | 1 |
| 2 | 0.0000 | 0 | 15 | 4.2450 | 3 | 28 | 0.0000 | 1 |
| 3 | 0.5803 | 1 | 16 | 2.5523 | 1 | 29 | 0.0000 | 1 |
| 4 | 11.7646 | 6 | 17 | 2.3568 | 1 | 30 | 0.0000 | 0 |
| 5 | 10.3804 | 6 | 18 | 2.0995 | 1 | 31 | 7.3380 | 5 |
| 6 | 10.6489 | 6 | 19 | 1.5516 | 1 | 32 | 7.4773 | 5 |
| 7 | 9.9658 | 5 | 20 | 1.4768 | 1 | 33 | 0.0000 | 0 |
| 8 | 9.5830 | 5 | 21 | 2.1258 | 1 | 34 | 0.0000 | 0 |
| 9 | 0.0000 | 0 | 22 | 1.6480 | 1 | 35 | 0.0000 | 0 |
| 10 | 11.2007 | 6 | 23 | 1.7070 | 1 | 36 | 0.0000 | 0 |
| 11 | 11.5400 | 6 | 24 | 2.6959 | 1 | 37 | 0.0000 | 0 |
| 12 | 11.2962 | 6 | 25 | 0.0000 | 0 | 38 | 0.0000 | 0 |
| 13 | 10.8595 | 6 | 26 | 0.3354 | 2 | 39 | 0.0000 | 0 |
| Device Type | Operational Life/a | Installation Costs/USD | Reimbursement Unit Price/[USD∙Mvar−1] |
|---|---|---|---|
| SVC | 10 | 1.3 × 107 | 3 × 104 |
| STATCOM | 10 | 2.6 × 107 | 9 × 104 |
| Method | Scheme | Cost/USD | Γ |
|---|---|---|---|
| Differential compensation | 1 | 2.3769 × 108 | 3.9567 |
| 2 | 1.6360 × 108 | 3.5939 | |
| 3 | 1.4310 × 108 | 2.7685 | |
| 4 | 1.5268 × 108 | 3.1681 | |
| 5 | 2.5398 × 108 | 3.9922 | |
| Traditional compensation | 1 | 2.3295 × 108 | 3.8017 |
| 2 | 2.2608 × 108 | 3.6932 | |
| 3 | 1.7659 × 108 | 2.9846 | |
| 4 | 1.6186 × 108 | 2.8461 | |
| 5 | 1.4974 × 108 | 2.7926 |
| Compensation Node | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | Scheme 5 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Capacity /Mvar | Type | Capacity /Mvar | Type | Capacity /Mvar | Type | Capacity /Mvar | Type | Capacity /Mvar | Type | |
| Bus-12 | 463 | SVC | 372 | STATCOM | 438 | SVC | 306 | STATCOM | 433 | SVC |
| Bus-15 | 453 | STATCOM | 255 | SVC | 225 | SVC | 206 | SVC | 460 | STATCOM |
| Bus-17 | 478 | SVC | 456 | SVC | 114 | SVC | 300 | SVC | 418 | STATCOM |
| Bus-26 | 238 | STATCOM | 310 | SVC | 363 | SVC | 240 | SVC | 91 | SVC |
| Bus-27 | 406 | SVC | 402 | SVC | 395 | SVC | 397 | SVC | 454 | SVC |
| Bus-29 | 201 | STATCOM | 115 | SVC | 85 | SVC | 195 | SVC | 318 | STATCOM |
| Scheme | Cost/USD | Γ | Closeness Value |
|---|---|---|---|
| 1 | 2.3769 × 108 | 3.9567 | 0.4179 |
| 2 | 1.6360 × 108 | 3.5939 | 0.7707 |
| 3 | 1.4310 × 108 | 2.7685 | 0.6202 |
| 4 | 1.5268 × 108 | 3.1681 | 0.6894 |
| 5 | 2.5398 × 108 | 3.9922 | 0.3798 |
| Method of Compensation | Cost/USD | Γ | Total Number of Instabilities |
|---|---|---|---|
| Uncompensated | 0 | −5.6620 | 106 |
| Traditional compensation method | 2.1008 × 108 | 3.6032 | 78 |
| Differentiated compensation method | 1.6360 × 108 | 3.5939 | 79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, J.; Tang, F.; Wang, J.; Yu, X.; Deng, H. A Differentiated Dynamic Reactive Power Compensation Scheme for the Suppression of Transient Voltage Dips in Distribution Systems. Sustainability 2023, 15, 13816. https://doi.org/10.3390/su151813816
Dang J, Tang F, Wang J, Yu X, Deng H. A Differentiated Dynamic Reactive Power Compensation Scheme for the Suppression of Transient Voltage Dips in Distribution Systems. Sustainability. 2023; 15(18):13816. https://doi.org/10.3390/su151813816
Chicago/Turabian StyleDang, Jie, Fei Tang, Jiale Wang, Xiaodong Yu, and Huipeng Deng. 2023. "A Differentiated Dynamic Reactive Power Compensation Scheme for the Suppression of Transient Voltage Dips in Distribution Systems" Sustainability 15, no. 18: 13816. https://doi.org/10.3390/su151813816
APA StyleDang, J., Tang, F., Wang, J., Yu, X., & Deng, H. (2023). A Differentiated Dynamic Reactive Power Compensation Scheme for the Suppression of Transient Voltage Dips in Distribution Systems. Sustainability, 15(18), 13816. https://doi.org/10.3390/su151813816