
State Estimation of Distributed Drive Electric Vehicle Based on Adaptive Kalman Filter


Abstract
:1. Introduction
2. Modeling of Distributed Drive Electric Vehicles
2.1. Three-Degrees-of-Freedom Vehicle Model
- (1)
- The coordinate origin of the vehicle dynamics model coincides with the mass center;
- (2)
- The body is rigid and the four wheels are controlled independently of each other;
- (3)
- The characteristics of each tire are the same;
- (4)
- The influence of the suspension system on the vehicle motion is ignored.
2.2. Tire Model
3. Estimation Algorithm Design
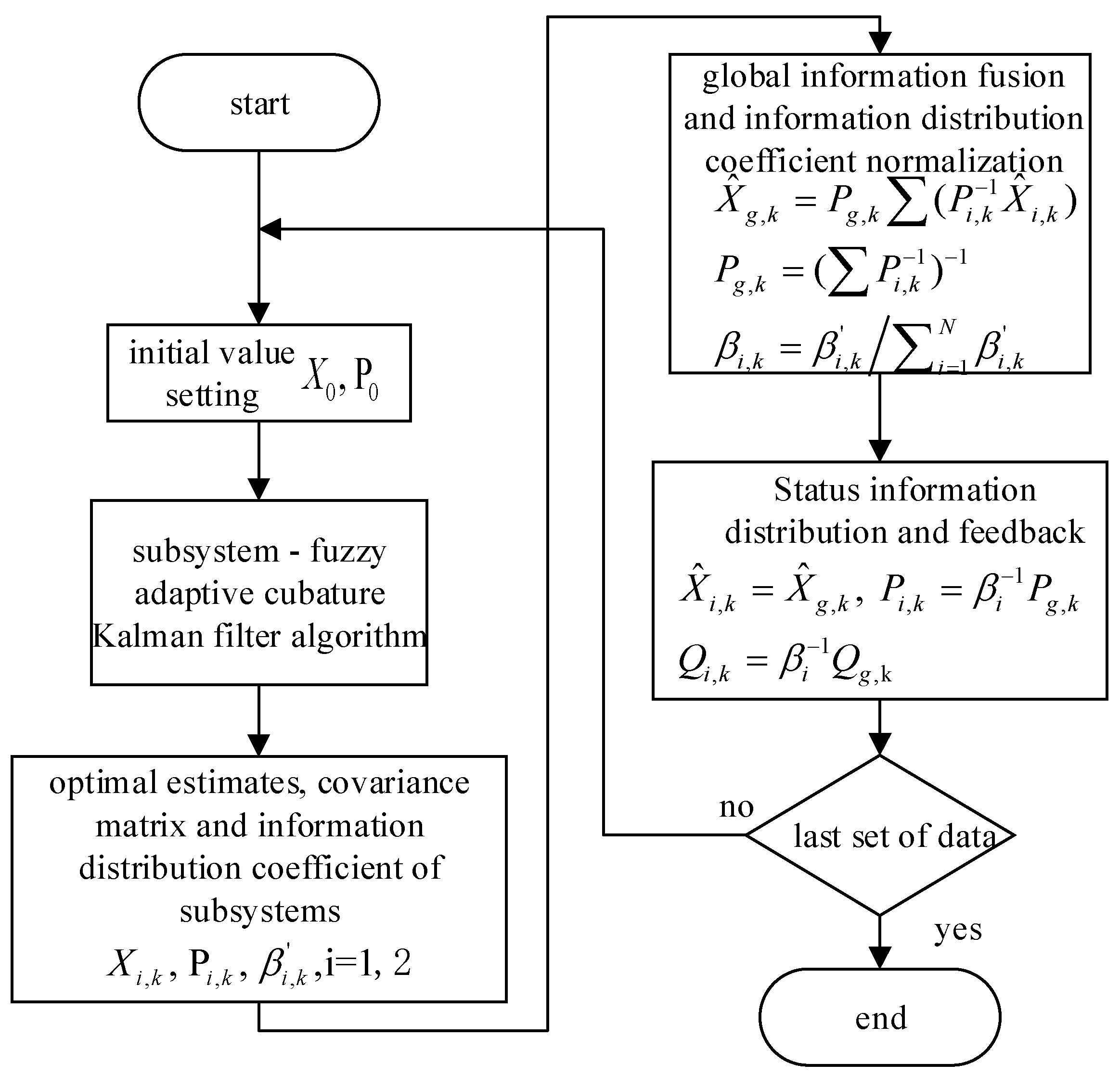
3.1. Improved Cubature Kalman Filter Algorithm
3.2. Research on Adaptive Information Distribution Algorithm
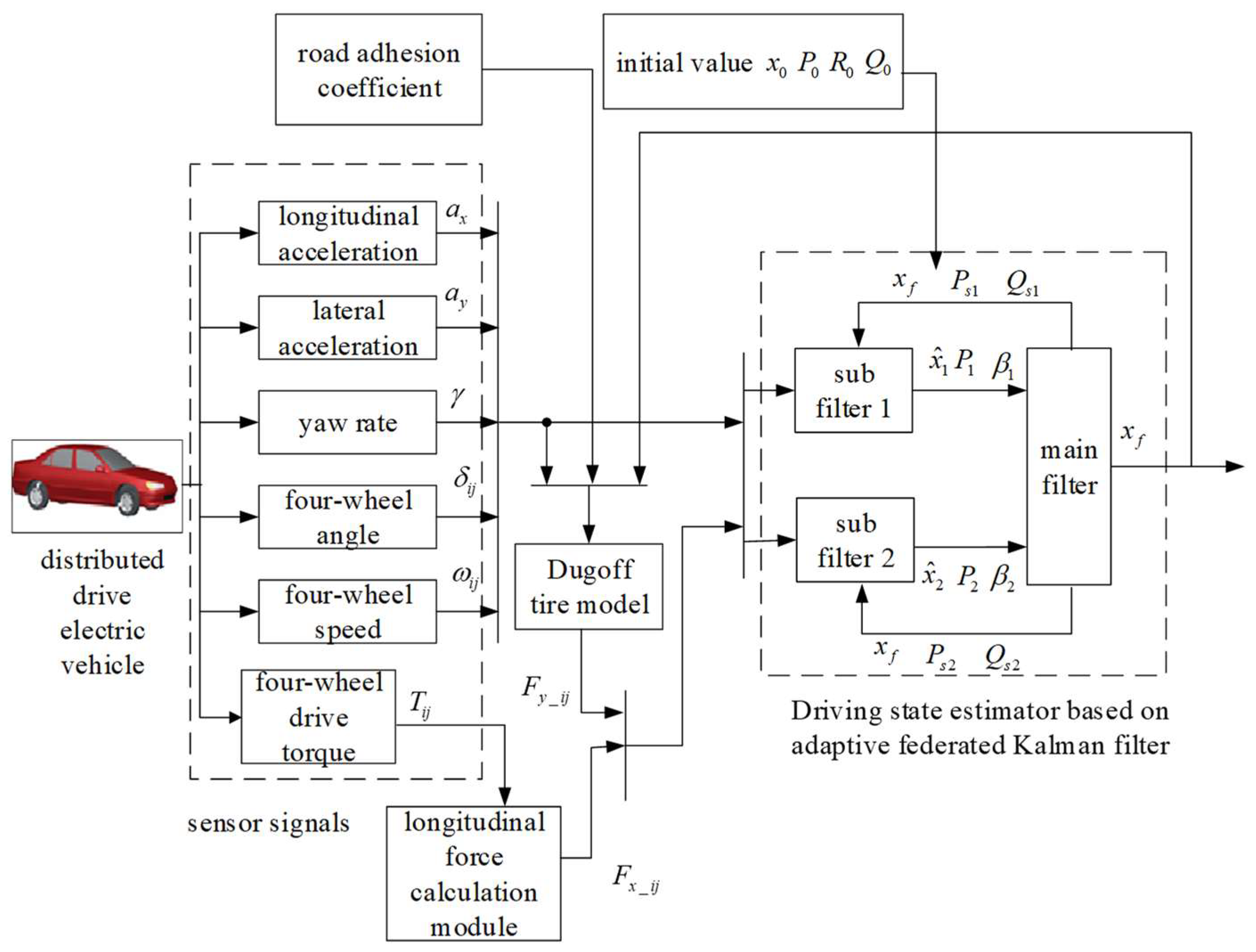
4. Driving State Estimation for Distributed Drive Electric Vehicles
4.1. Principle of Vehicle Traveling State Estimation
4.2. Estimation Process
4.3. Simulation Verification
- High-adhesion road conditions.
- Medium-adherent pavement conditions.
- Low-adhesion road conditions.
5. Hardware-in-the-Loop Experimental Verification
- Variable speed double-shift line experimental conditions.
- Variable speed serpentine experimental conditions.
6. Conclusions
- (1)
- In order to reduce the error caused by the model accuracy during the filtering process, and to make the model closer to reality, more degrees of freedom can be considered to be built.
- (2)
- Due to the limited authorization of experimental equipment and experimental sites, the algorithms involved have not been studied in depth in different initial states and real urban road scenes, and it is necessary to carry out real vehicle experiments under multiple working conditions to improve the adaptability and accuracy of the algorithms under actual driving conditions in future research.
- (3)
- In this paper, the design of the estimation algorithm is carried out on a distributed drive electric vehicle, which can be applied to other types of vehicles in the future to verify the portability of the algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hooftman, N.; Oliveira, L.; Messagie, M.; Coosemans, T.; Van Mierlo, J. Environmental Analysis of Petrol, Diesel and Electric Passenger Cars in a Belgian Urban Setting. Energies 2016, 9, 84. [Google Scholar] [CrossRef]
- Jochem, P.; Doll, C.; Fichtner, W. External costs of electric vehicles. Transp. Res. Part D Transp. Environ. 2016, 42, 60–76. [Google Scholar] [CrossRef]
- Katsuyama, E.; Yamakado, M.; Abe, M. A state-of-the-art review: Toward a novel vehicle dynamics control concept taking the drive line of electric vehicles into account as promising control actuators. Veh. Syst. Dyn. 2021, 59, 976–1025. [Google Scholar] [CrossRef]
- Chan, C. Renaissance and Electric Vehicles Development. In Mobility Engineering: Proceedings of CAETS 2015 Convocation on Pathways to Sustainability; Springer: Singapore, 2017; pp. 1–9. [Google Scholar]
- Sun, C.; Sun, P.; Zhou, J.; Mao, J. Travel reduction control of distributed drive electric agricultural vehicles based on multi-information fusion. Agriculture 2022, 12, 70. [Google Scholar] [CrossRef]
- Yao, Y.; Yan, Y.; Peng, L.; Han, D.; Wang, J.; Yin, G. Longitudinal and Lateral Coordinated Control of Distributed Drive Electric Vehicles Based on Model Predictive Control. In Proceedings of the 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI), Nanjing, China, 28–30 October 2022; pp. 1–6. [Google Scholar]
- Arndt, M.; Ding, E.; Massel, T. Observer based diagnosis of roll rate sensor. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 1540–1545. [Google Scholar]
- Yang, K.; Dong, D.; Ma, C.; Tian, Z.; Chang, Y.; Wang, G. Stability control for electric vehicles with four in-wheel-motors based on sideslip angle. World Electr. Veh. J. 2021, 12, 42. [Google Scholar] [CrossRef]
- Chu, W. State Estimation and Coordinated Control for Distributed Electric Vehicles; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Pei, X.; Chen, Z.; Yang, B.; Chu, D. Estimation of states and parameters of multi-axle distributed electric vehicle based on dual unscented Kalman filter. Sci. Prog. 2020, 103, 0036850419880083. [Google Scholar] [CrossRef] [PubMed]
- Marco, V.R.; Kalkkuhl, J.; Raisch, J. EKF for simultaneous vehicle motion estimation and IMU bias calibration with observability-based adaptation. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 6309–6316. [Google Scholar]
- Liu, Y.-H.; Li, T.; Yang, Y.-Y.; Ji, X.-W.; Wu, J. Estimation of tire-road friction coefficient based on combined APF-IEKF and iteration algorithm. Mech. Syst. Signal Process. 2017, 88, 25–35. [Google Scholar] [CrossRef]
- Wenzel, T.A.; Burnham, K.; Blundell, M.; Williams, R. Dual extended Kalman filter for vehicle state and parameter estimation. Veh. Syst. Dyn. 2006, 44, 153–171. [Google Scholar] [CrossRef]
- Liu, W.; He, H.; Sun, F. Vehicle state estimation based on minimum model error criterion combining with extended Kalman filter. J. Frankl. Inst. 2016, 353, 834–856. [Google Scholar] [CrossRef]
- Yu, H.; Duan, J.; Taheri, S.; Cheng, H.; Qi, Z. A model predictive control approach combined unscented Kalman filter vehicle state estimation in intelligent vehicle trajectory tracking. Adv. Mech. Eng. 2015, 7, 1687814015578361. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Chen, J. Fusion algorithm design based on adaptive SCKF and integral correction for side-slip angle observation. IEEE Trans. Ind. Electron. 2017, 65, 5754–5763. [Google Scholar] [CrossRef]
- Wan, W.; Feng, J.; Song, B.; Li, X. Huber-Based Robust Unscented Kalman Filter Distributed Drive Electric Vehicle State Observation. Energies 2021, 14, 750. [Google Scholar] [CrossRef]
- Ge, P.; Zhang, C.; Zhang, T.; Guo, L.; Xiang, Q. Maximum Correntropy Square-Root Cubature Kalman Filter with State Estimation for Distributed Drive Electric Vehicles. Appl. Sci. 2023, 13, 8762. [Google Scholar] [CrossRef]
- Liu, Y.; Cui, D. Estimation algorithm for vehicle state estimation using ant lion optimization algorithm. Adv. Mech. Eng. 2022, 14, 16878132221085839. [Google Scholar] [CrossRef]
- Kobayashi, T.; Sugiura, H.; Ono, E.; Katsuyama, E.; Yamamoto, M. Efficient direct yaw moment control of in-wheel motor vehicle. In Advanced Vehicle Control; CRC Press: Boca Raton, FL, USA, 2016; pp. 631–636. [Google Scholar]
- Leng, B.; Jin, D.; Xiong, L.; Yang, X.; Yu, Z. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion. Mech. Syst. Signal Process. 2021, 150, 107275. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, H.; Huang, Y.; Wang, P.; Guo, K. Human-centered torque vectoring control for distributed drive electric vehicle considering driving characteristics. IEEE Trans. Veh. Technol. 2021, 70, 7386–7399. [Google Scholar] [CrossRef]
- Heidfeld, H.; Schünemann, M. Optimization-based tuning of a hybrid ukf state estimator with tire model adaption for an all wheel drive electric vehicle. Energies 2021, 14, 1396. [Google Scholar] [CrossRef]
- Chindamo, D.; Lenzo, B.; Gadola, M. On the vehicle sideslip angle estimation: A literature review of methods, models, and innovations. Appl. Sci. 2018, 8, 355. [Google Scholar] [CrossRef]
- Luo, Q.; Yan, X.; Wang, C.; Shao, Y.; Zhou, Z.; Li, J.; Hu, C.; Wang, C.; Ding, J. A SINS/DVL/USBL integrated navigation and positioning IoT system with multiple sources fusion and federated Kalman filter. J. Cloud Comput. 2022, 11, 18. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Bucknall, R. A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering. IEEE Access 2019, 7, 46071–46083. [Google Scholar] [CrossRef]
- Huang, B.; Fu, X.; Wu, S.; Huang, S. Calculation algorithm of tire-road friction coefficient based on limited-memory adaptive extended Kalman filter. Math. Probl. Eng. 2019, 2019, 1056269. [Google Scholar] [CrossRef]
- Zhi-qiang, L.; Yi-qun, L. Estimation algorithm for road adhesion coefficient using adaptive fading unscented Kalman filter. China J. Highw. Transp. 2020, 33, 176. [Google Scholar]
- Zhao, W.; Qin, X.; Wang, C. Yaw and lateral stability control for four-wheel steer-by-wire system. IEEE/ASME Trans. Mechatron. 2018, 23, 2628–2637. [Google Scholar] [CrossRef]
- Regression Evaluation Indicators MSE, RMSE, MAE, R-Squared. Available online: https://blog.csdn.net/skullFang/article/details/79107127 (accessed on 19 January 2018).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NM | NS | Z | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | PVB | PB | PMB | PSM | PVS | PS | PMB |
| NM | PB | PMB | PM | PM | PS | PSM | PB |
| Z | PMB | PM | PSM | PSM | PSM | PM | PMB |
| PM | PB | PSM | PS | PM | PM | PMB | PB |
| PB | PMB | PS | PSM | PMB | PMB | PB | PVB |
| Symbol | Parameter Name | Value |
|---|---|---|
| m | Vehicle mass (kg) | 830 |
| m | Sprung mass (kg) | 747 |
| L | Wheelbase (m) | 2.34 |
| A | Distance from center of mass to front axle (m) | 1.17 |
| d1 | Front wheel track (m) | 1.416 |
| d2 | Rear wheel track (m) | 1.416 |
| r | Wheel radius (m) | 0.278 |
| h | Distance from the centroid to ground (m) | 0.54 |
| Iz | Rotational inertia (kg·m2) | 1110 |
| MAE | RMSE | |||
|---|---|---|---|---|
| Estimated Parameters | FKF Algorithm | Improved Algorithm | FKF Algorithm | Improved Algorithm |
| Longitudinal speed vx (m/s) | 0.0050 | 0.0009 | 0.0063 | 0.0012 |
| Lateral speed vy (m/s) | 0.0274 | 0.0024 | 0.0572 | 0.0040 |
| Centroid slip angle (deg) | 0.0025 | 0.0002 | 0.0051 | 0.0004 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, R.; Li, G.; Wu, Y. State Estimation of Distributed Drive Electric Vehicle Based on Adaptive Kalman Filter. Sustainability 2023, 15, 13446. https://doi.org/10.3390/su151813446
Fan R, Li G, Wu Y. State Estimation of Distributed Drive Electric Vehicle Based on Adaptive Kalman Filter. Sustainability. 2023; 15(18):13446. https://doi.org/10.3390/su151813446
Chicago/Turabian StyleFan, Ruolan, Gang Li, and Yanan Wu. 2023. "State Estimation of Distributed Drive Electric Vehicle Based on Adaptive Kalman Filter" Sustainability 15, no. 18: 13446. https://doi.org/10.3390/su151813446
APA StyleFan, R., Li, G., & Wu, Y. (2023). State Estimation of Distributed Drive Electric Vehicle Based on Adaptive Kalman Filter. Sustainability, 15(18), 13446. https://doi.org/10.3390/su151813446