
Optimized Design and Experiment of a Self-Covering Furrow Opener for an Automatic Sweet Potato Seedling Transplanting Machine



Abstract
:1. Introduction
2. Materials and Methods
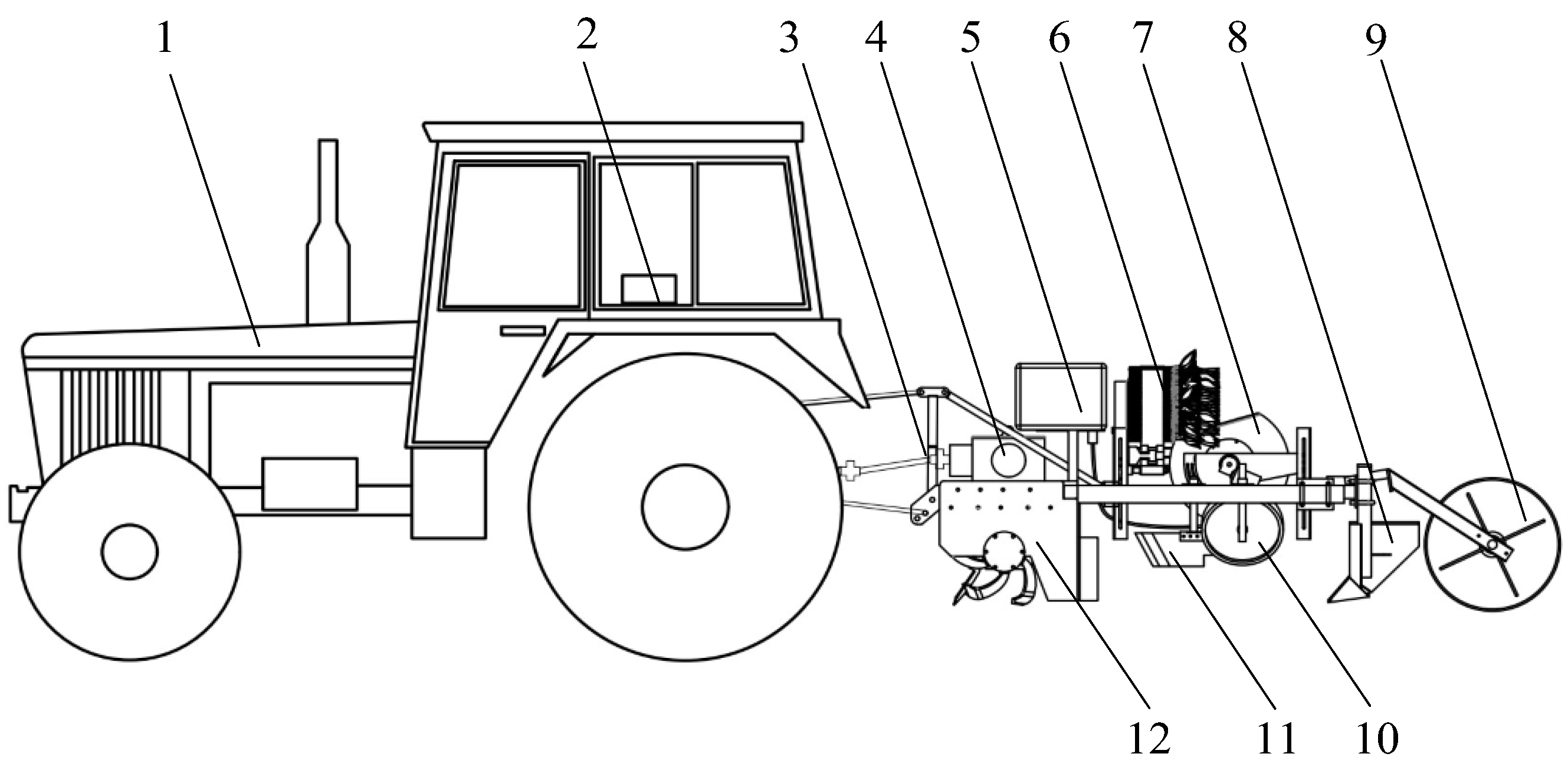
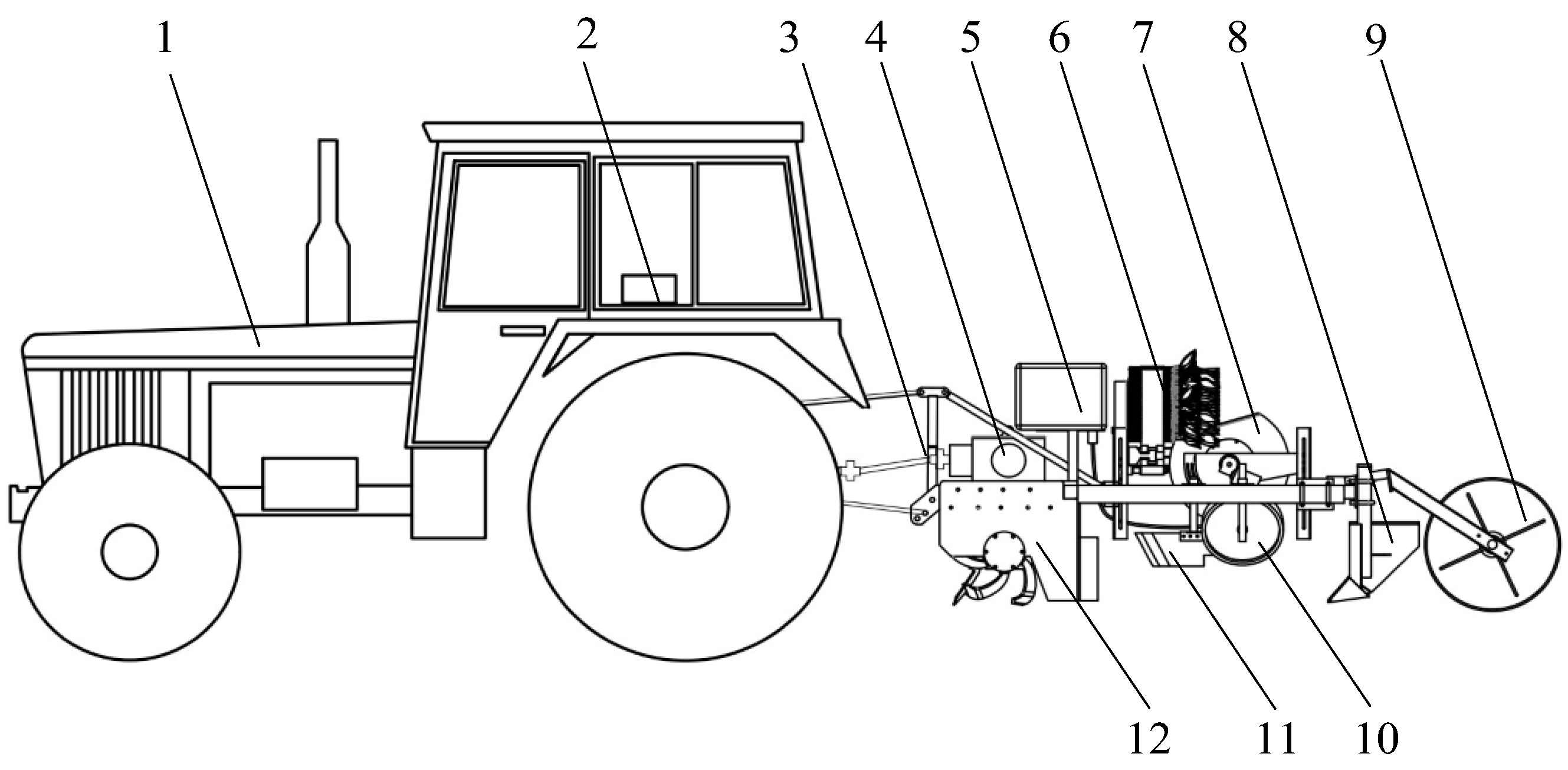
2.1. Structure and Working Principle of Automatic Transplanting Machine for Sweet Potato Bare Seedling
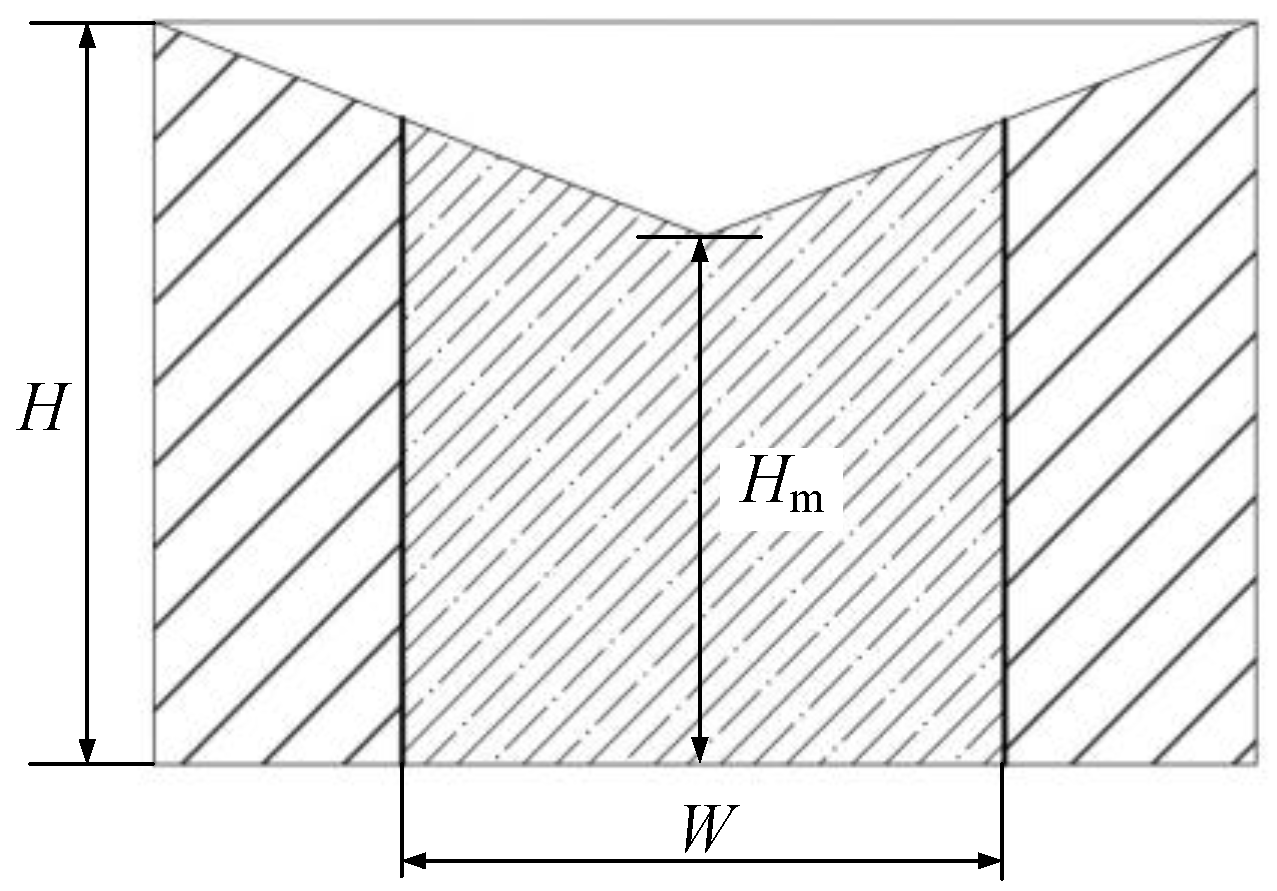
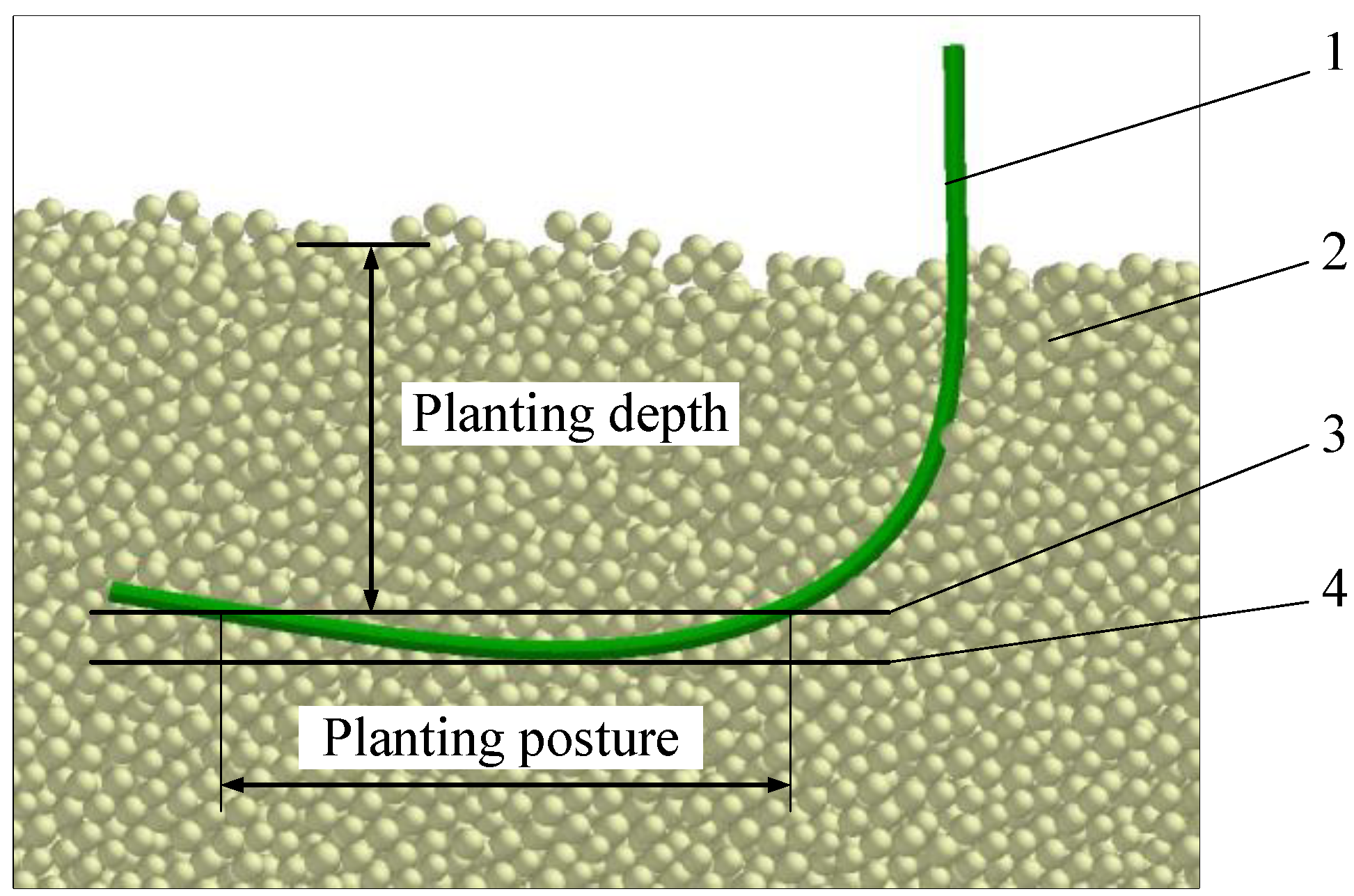
2.2. Agronomic Requirements for Horizontal Transplanting of Sweet Potato
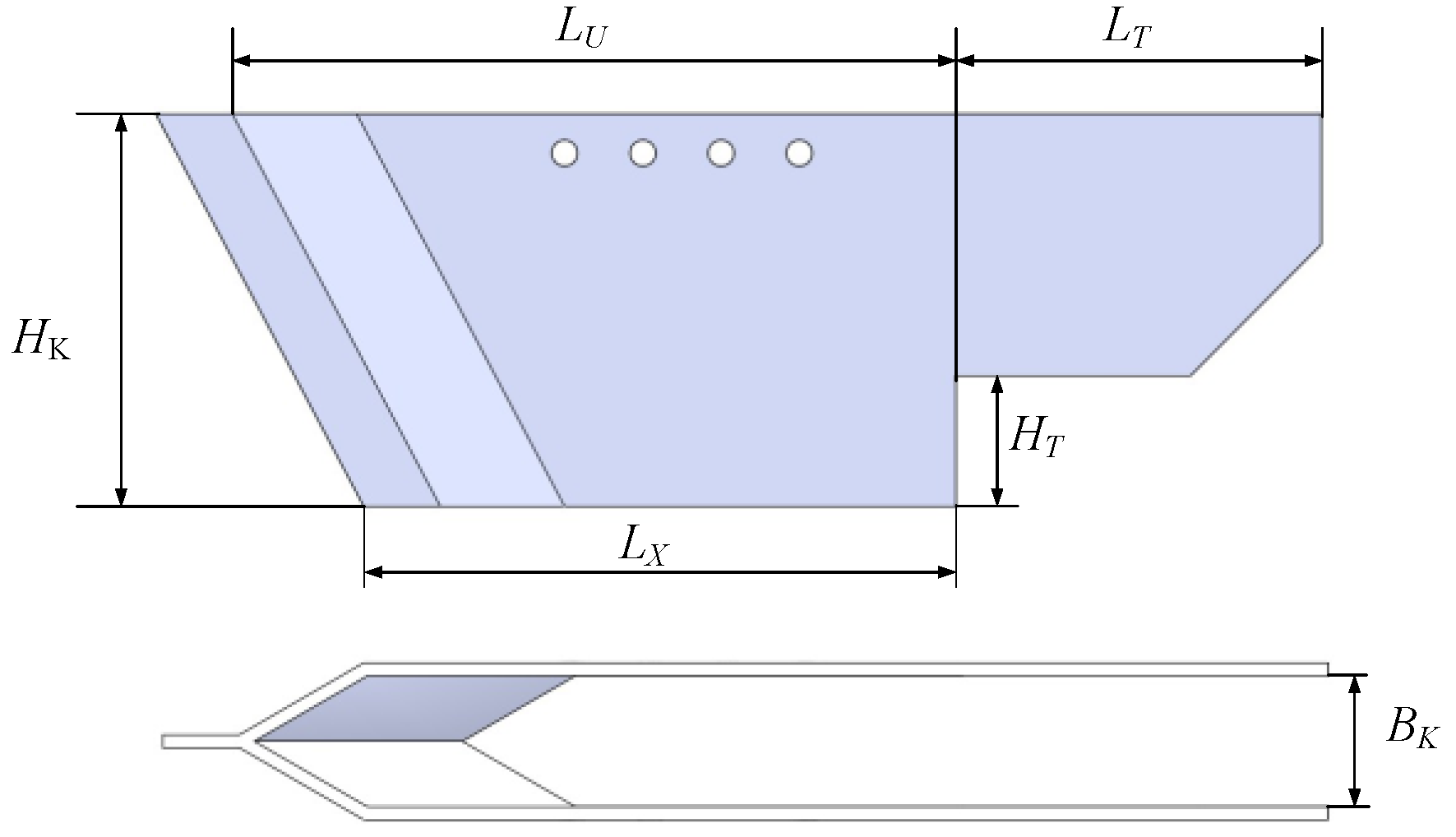
2.3. Structure and Working Principle of Trencher
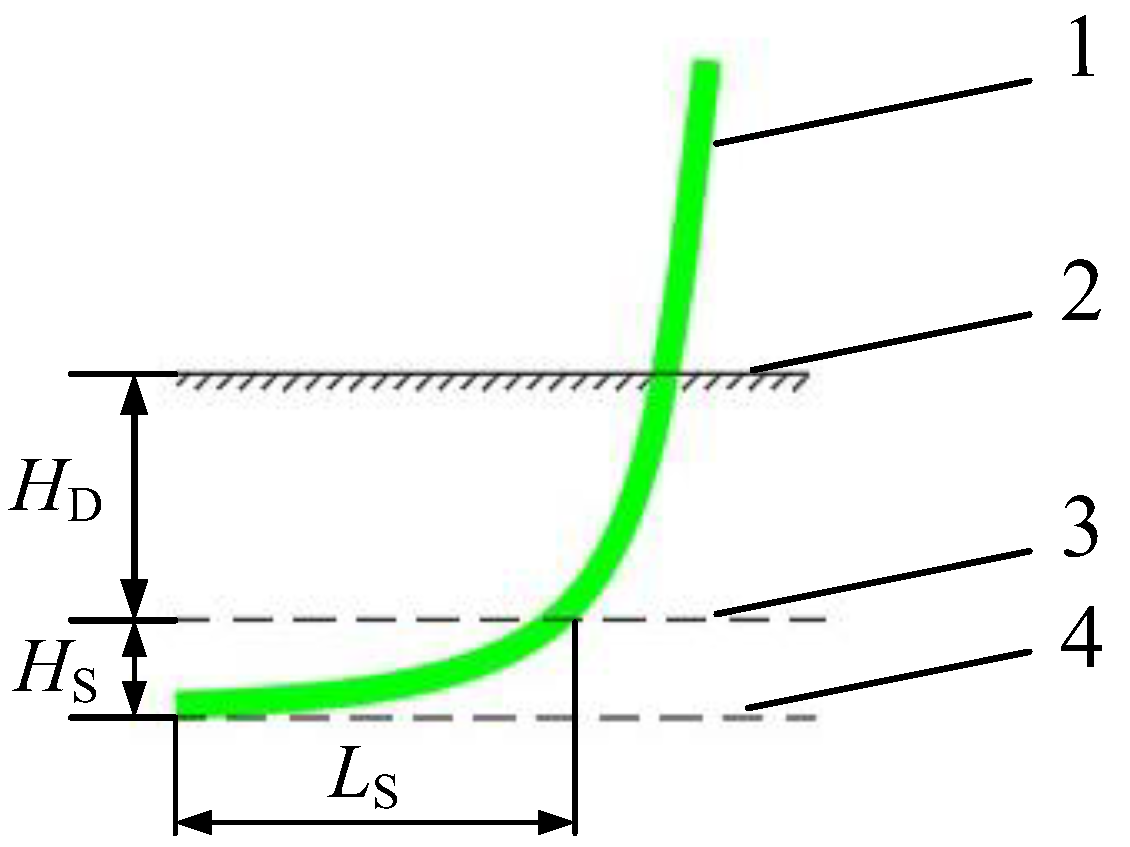
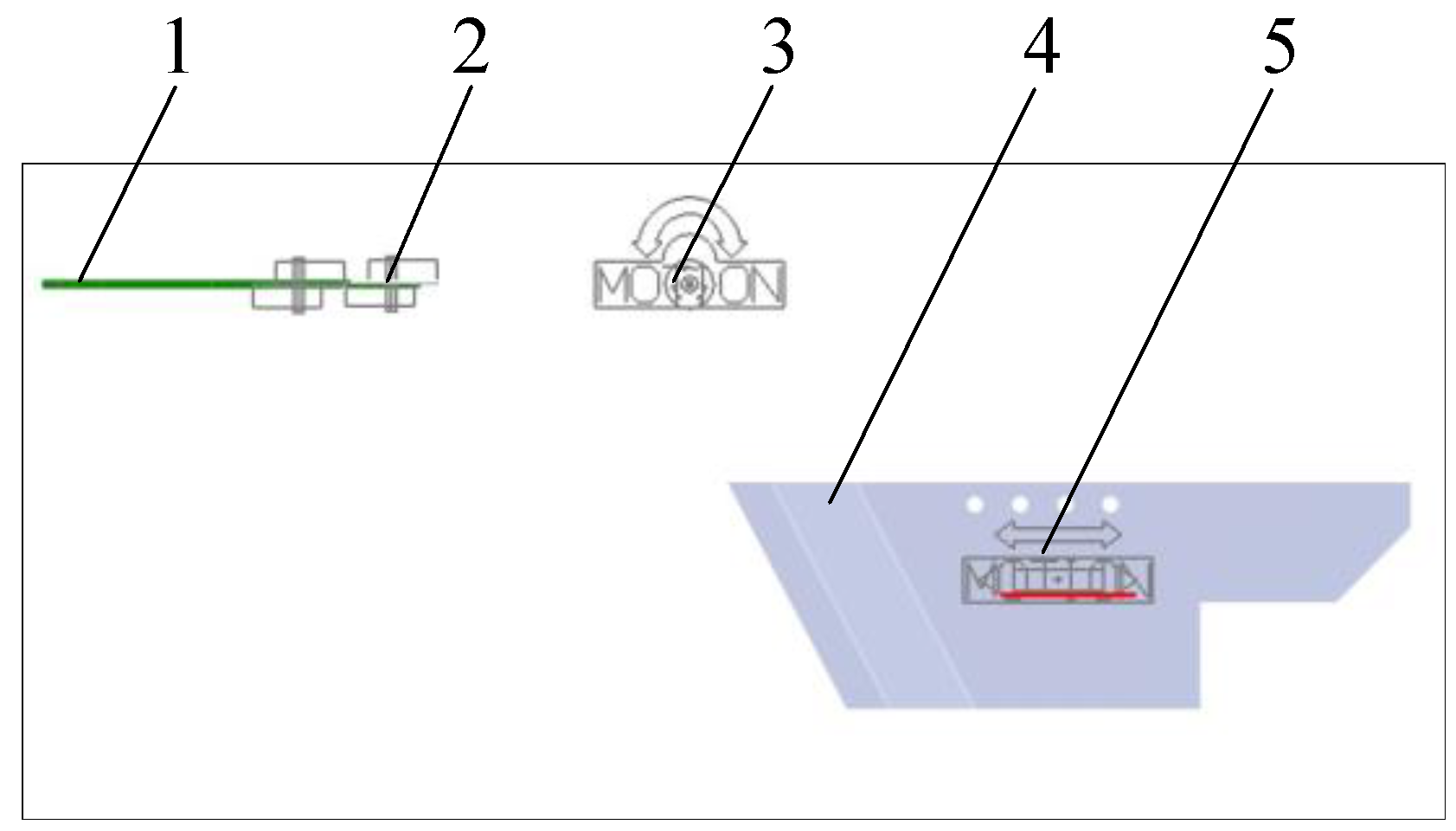
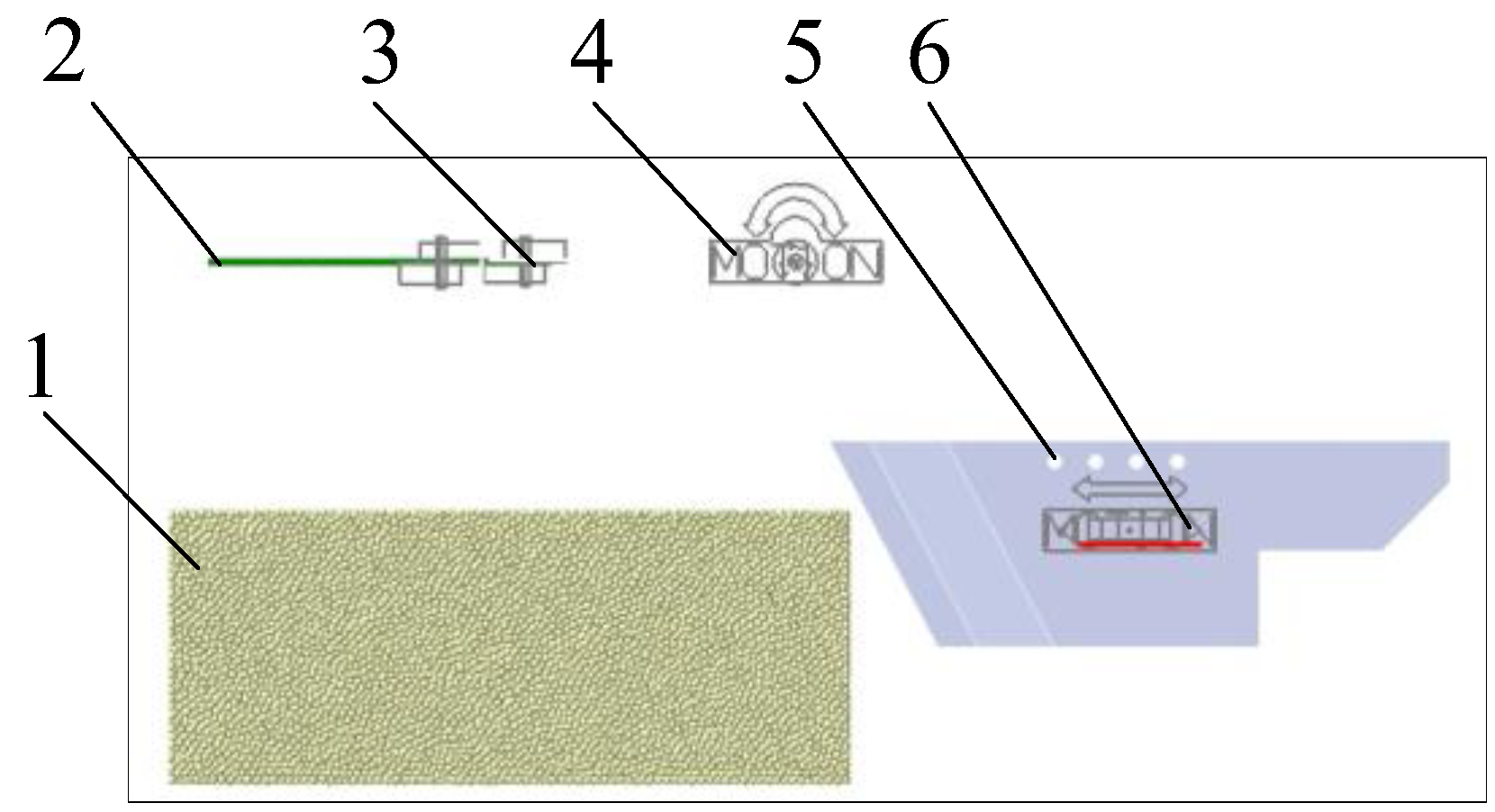
2.4. Analysis of the Effect of Soil Reflux on the Morphology of Bare Sweet Potato Seedlings into Soil
2.5. EDEM and Recurdyn Co-Simulation
2.6. Simulation Test Design
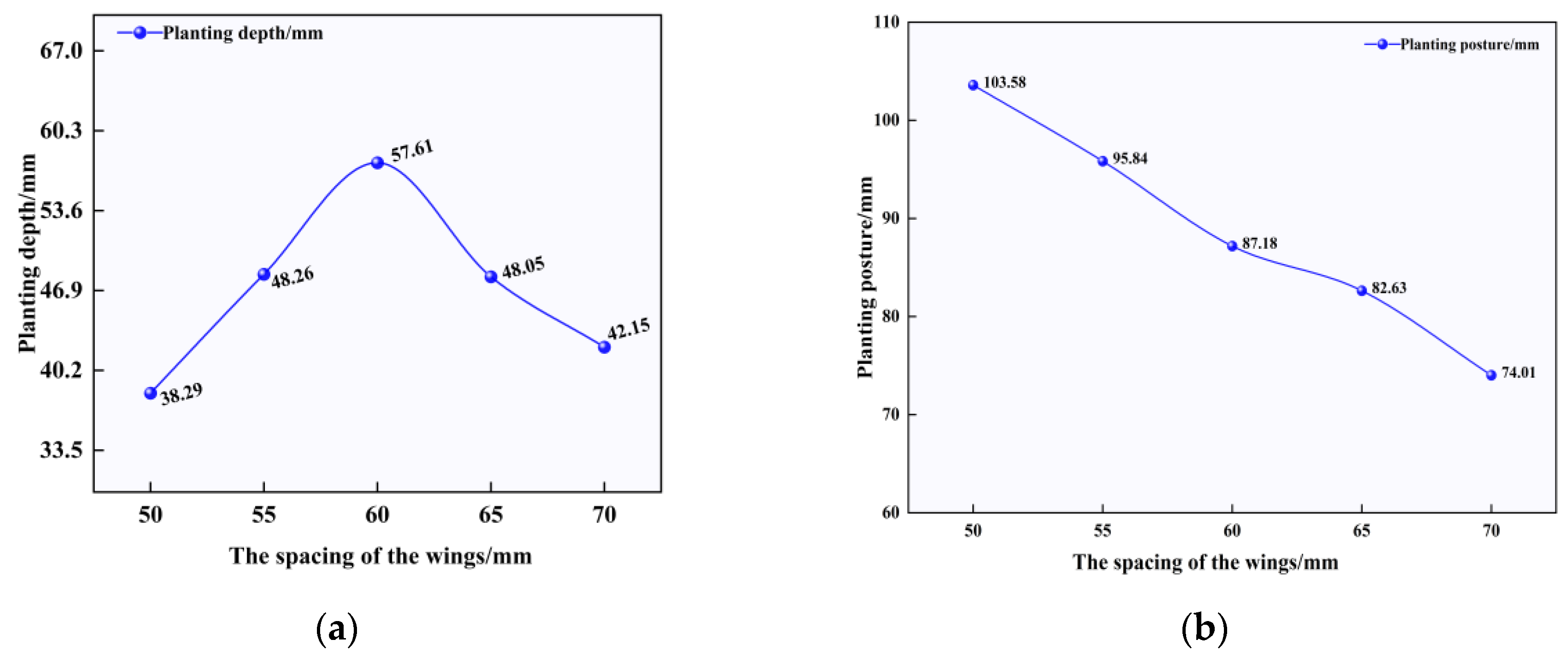
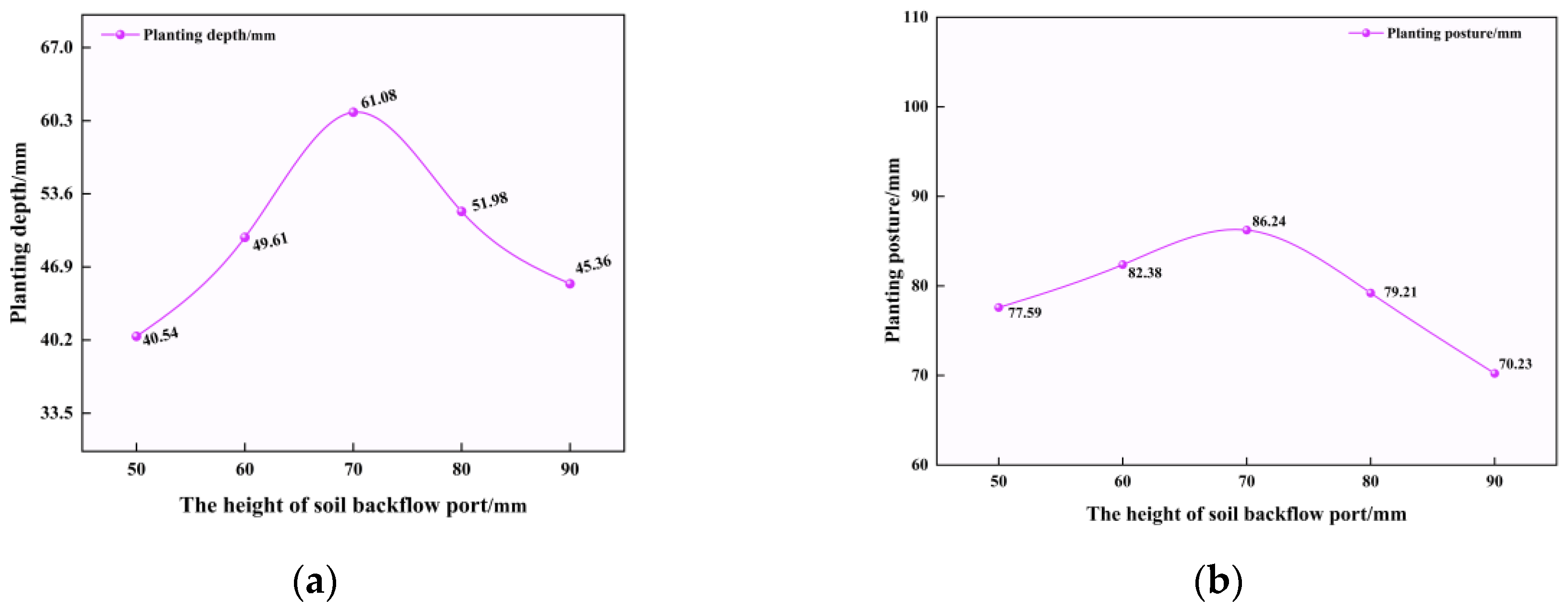
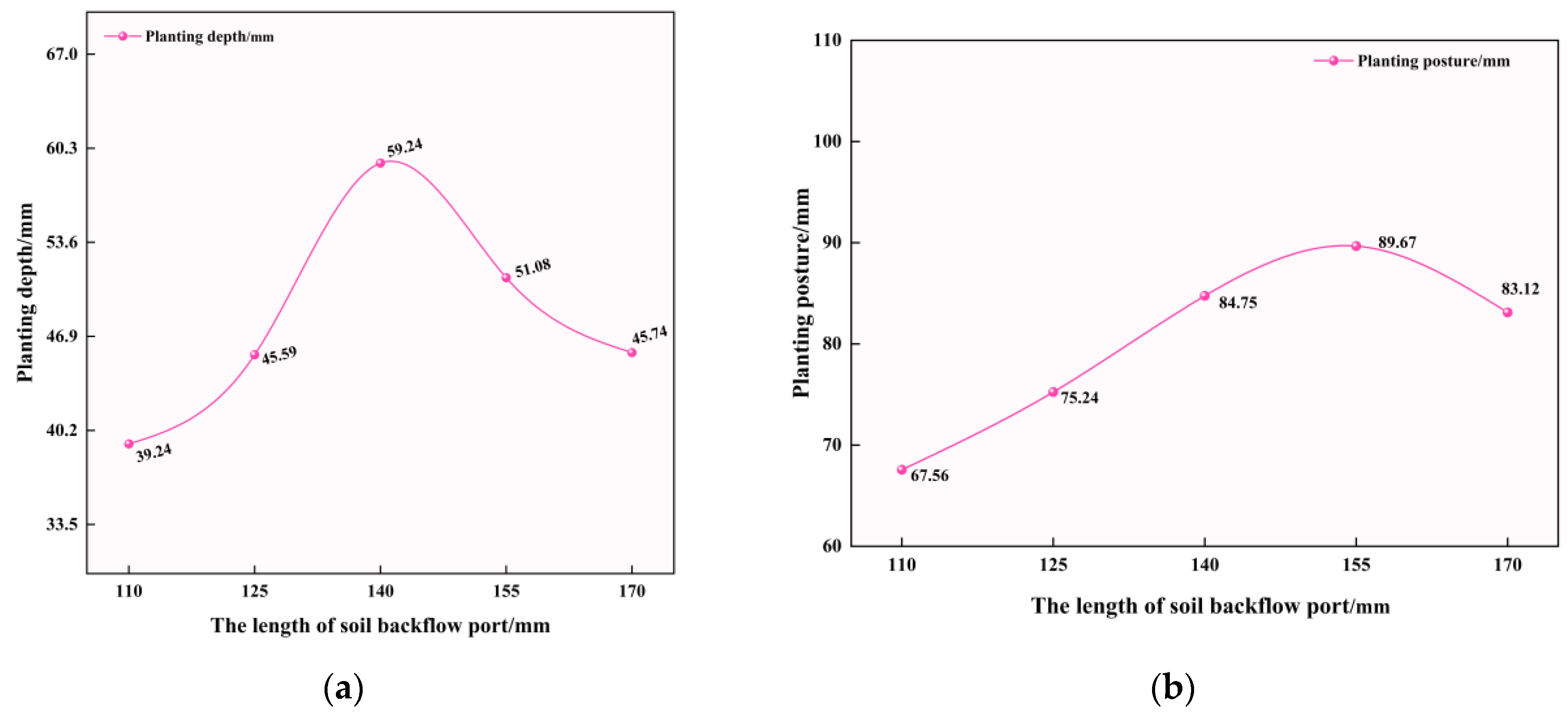
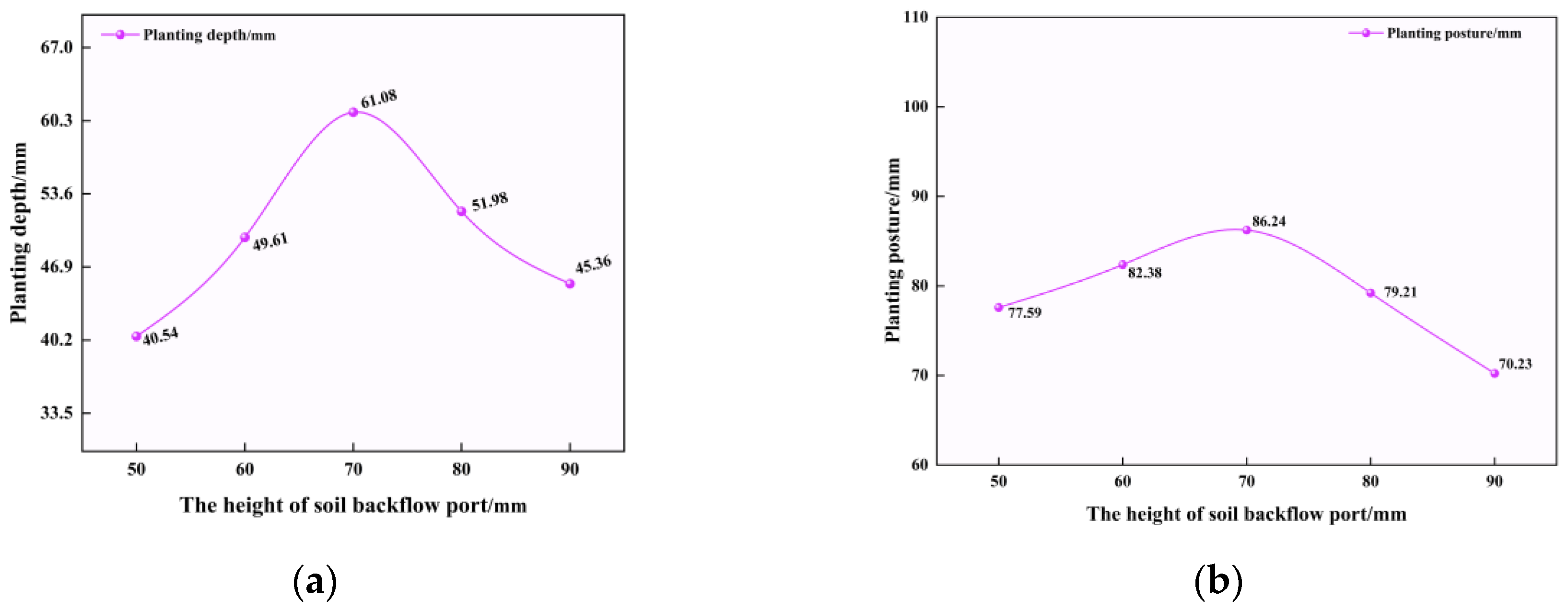
2.6.1. Single-Factor Experiment Design
2.6.2. Orthogonal Experimental Design
3. Results and Discussion
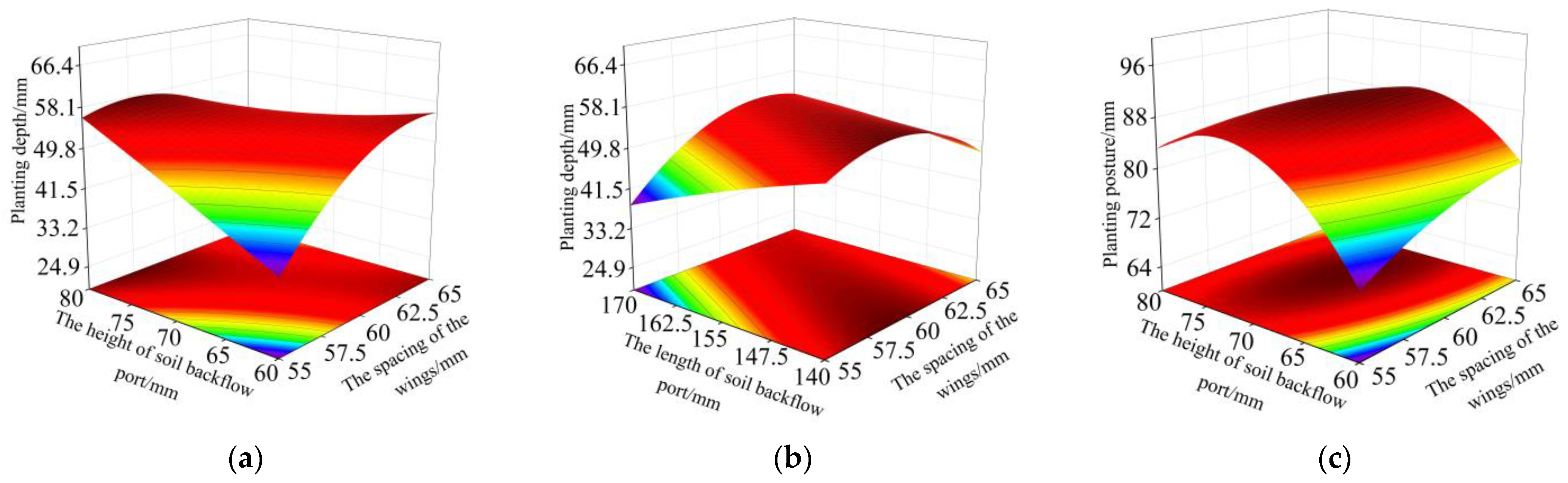
3.1. Key Parameters’ Fitting and Analysis
3.2. Field Verification Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ayeleso, T.B.; Ramachela, K.; Mukwevho, E. A review of therapeutic potentials of sweet potato: Pharmacological activities and influence of the cultivar. Trop. J. Pharm. Res. 2016, 15, 2751–2761. [Google Scholar] [CrossRef]
- Qin, Y.; Naumovski, N.; Ranadheera, C.S.; D’Cunha, N.M. Nutrition-related health outcomes of sweet potato (Ipomoea batatas) consumption: A systematic review. Food Biosci. 2022, 50, 102208. [Google Scholar] [CrossRef]
- Peter, T.; Michael, P. Sweet potato is a strategic root crop in Oceania: A synthesis of the past research and future direction ARTICLE INFO ABSTRACT Keywords: Climate change Cultural practices Food and nutritional security Oceania Sweet potato. SAINS TANAH J. Soil Sci. Agroclimatol. 2023, 20, 51–65. [Google Scholar] [CrossRef]
- Luo, Z.; Yao, Z.; Yang, Y.; Wang, Z.; Zou, H.; Zhang, X.; Chen, J.; Fang, B.; Huang, L.J.B.P.B. Genetic fingerprint construction and genetic diversity analysis of sweet potato (Ipomoea batatas) germplasm resources. BMC Plant Biol. 2023, 23, 355. [Google Scholar] [CrossRef] [PubMed]
- Iese, V.; Holland, E.; Wairiu, M.; Havea, R.; Patolo, S. Facing food security risks: The rise and rise of the sweet potato in the Pacific Islands. Glob. Food Sec. 2018, 18, 48–56. [Google Scholar] [CrossRef]
- Escobar-Puentes, A.A.; Palomo, I.; Rodríguez, L.; Fuentes, E.; Villegas-Ochoa, M.A.; González-Aguilar, G.A.; Olivas-Aguirre, F.J.; Wall-Medrano, A. Sweet Potato (Ipomoea batatas L.) Phenotypes: From Agroindustry to Health Effects. Foods 2022, 11, 1058. [Google Scholar] [CrossRef] [PubMed]
- Chattopadhyay, A.; Chakraborty, I.; Mukhopadhyay, S.; Kumar, P.; Sen, H. Compositional Changes of sweetpotato as Influenced by Cultivar, Harvest date and Cooking. Acta Hortic. 2005, 703, 211–218. [Google Scholar] [CrossRef]
- Meira, M.; Silva, E.P.d.; David, J.M.; David, J.P. Review of the genus Ipomoea: Traditional uses, chemistry and biological activities. Rev. Bras. Farmacogn. 2012, 22, 682–713. [Google Scholar] [CrossRef]
- Tedesco, D.; de Almeida Moreira, B.R.; Júnior, M.R.B.; Maeda, M.; da Silva, R.P.J.A.S. Sustainable management of sweet potatoes: A review on practices, strategies, and opportunities in nutrition-sensitive agriculture, energy security, and quality of life. Agric. Syst. 2023, 210, 103693. [Google Scholar] [CrossRef]
- Duque, L.O.; Sánchez, E.; Pecota, K.; Yencho, C.J.H. A win–win situation: Performance and adaptability of petite sweetpotato production in a temperate region. Horticulturae 2022, 8, 172. [Google Scholar] [CrossRef]
- Mwanga, R.; Ghislain, M.; Kreuze, J.F.; Ssemakula, G.; Yencho, G. Exploiting the Use of Biotechnology in Sweetpotato for Improved Nutrition and Food Security: Progress and Future Outlook. 2011. Available online: https://cgspace.cgiar.org/handle/10568/67667 (accessed on 30 November 2011).
- Tang, C.; Lu, Y.; Jiang, B.; Chen, J.; Mo, X.; Yang, Y.; Wang, Z. Energy, Economic, and Environmental Assessment of Sweet Potato Production on Plantations of Various Sizes in South China. Agronomy 2022, 12, 1290. [Google Scholar] [CrossRef]
- Ziska, L.H.; Runion, G.B.; Tomecek, M.; Prior, S.A.; Torbet, H.A.; Sicher, R. An evaluation of cassava, sweet potato and field corn as potential carbohydrate sources for bioethanol production in Alabama and Maryland. Biomass Bioenergy 2009, 33, 1503–1508. [Google Scholar] [CrossRef]
- Li, H.; Wang, L.; Shen, L. Potential CO2 Emission Reduction by Development of Non-Grain-Based Bioethanol in China. Environ. Manag. 2010, 46, 555–564. [Google Scholar] [CrossRef] [PubMed]
- Rozi, F.; Santoso, A.B.; Mahendri, I.G.A.P.; Hutapea, R.T.P.; Wamaer, D.; Siagian, V.; Elisabeth, D.A.A.; Sugiono, S.; Handoko, H.; Subagio, H.J.H. Indonesian market demand patterns for food commodity sources of carbohydrates in facing the global food crisis. Helyon 2023, 9, e16809. [Google Scholar] [CrossRef] [PubMed]
- Hall, M.R.J.H. Length, nodes underground, and orientation of transplants in relation to yields of sweet potato. HortScience 1986, 21, 88–89. [Google Scholar] [CrossRef]
- He, Y.; Zhu, Q.; Fu, W.; Luo, C.; Cong, Y.; Qin, W.; Meng, Z.; Chen, L.; Zhao, C.; Wu, G.J. Design and experiment of a control system for sweet potato seedling-feeding and planting device based on a pre-treatment seedling belt. J. Agric. Eng. 2022, 53, 187–196. [Google Scholar] [CrossRef]
- Sprenger, H.; Kurowsky, C.; Horn, R.; Erban, A.; Seddig, S.; Rudack, K.; Fischer, A.; Walther, D.; Zuther, E.; Köhl, K.J.P.; et al. The drought response of potato reference cultivars with contrasting tolerance. Plant Cell Environ. 2016, 39, 2370–2389. [Google Scholar] [CrossRef]
- Dathe, A.; Fleisher, D.H.; Timlin, D.J.; Fisher, J.K.; Reddy, V.R. Modeling potato root growth and water uptake under water stress conditions. Agric. For. Meteorol. 2014, 194, 37–49. [Google Scholar] [CrossRef]
- Joshi, M.; Fogelman, E.; Belausov, E.; Ginzberg, I. Potato root system development and factors that determine its architecture. J. Plant Physiol. 2016, 205, 113–123. [Google Scholar] [CrossRef]
- Guaman, V.; Båth, B.; Hagman, J.; Gunnarsson, A.; Persson, P. Short time effects of biological and inter-row subsoiling on yield of potatoes grown on a loamy sand, and on soil penetration resistance, root growth and nitrogen uptake. Eur. J. Agron. 2016, 80, 55–65. [Google Scholar] [CrossRef]
- Hu, L.; Wang, B.; Wang, G.; Yu, Z.; You, Z.; Hu, Z.; Wang, B.; Gao, X. Design and experiment of type 2ZGF-2 duplex sweet potato transplanter. Trans. Chin. Soc. Agric. Eng. 2016, 32, 8–16. [Google Scholar]
- Aikins, K.A.; Barr, J.B.; Ucgul, M.; Jensen, T.A.; Antille, D.L.; Desbiolles, J.M. No-tillage furrow opener performance: A review of tool geometry, settings and interactions with soil and crop residue. Soil Res. 2020, 58, 603–621. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, X.; Pan, Z.; Li, L.; Sun, Y. Agronomic characteristics and mechanized planting technology of sweet potato. J. Chin. Agric. 2021, 42, 21–26. [Google Scholar]
- Li, H.; Gao, F. Investigation on optimising agricultural cultivator openers using quadratic orthogonal rotation regression. Acta Agric. Scand. Sect. B Soil Plant Sci. 2021, 71, 970–979. [Google Scholar] [CrossRef]
- Ovtov, V.; Gorshkov, K.; Tretyakov, N.; Bikmaev, M. Onion Planter Opener Design and Stress-Strain Analysis. IOP Conf. Ser. Earth Environ. Sci. 2022, 1069, 012013. [Google Scholar] [CrossRef]
- Shangping, L.; Jiafeng, P.; Jiaqin, Z.; Zongxiao, H.; Fangfang, G. Design and Experiment of Furrow Opener for Transversal Sugarcane Planter Based on Effective Seeding Space. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2022, 53, 162–170. [Google Scholar]
- Solhjou, A.; Fielke, J.M.; Desbiolles, J.M.; Saunders, C.J.B.E. Soil translocation by narrow openers with various bent leg geometries. Biosyst. Eng. 2014, 127, 41–49. [Google Scholar] [CrossRef]
- Kashizadeh, E.J.M.T. Theoretical and Experimental Analysis of the Cutting Process in Sand. Mphil Thesis, The University of Newcastle, Callaghan, NSW, Australia, 2018. [Google Scholar]
- Kashizadeh, E.; Hambleton, J.P.; Stanier, S.A. A numerical approach for modelling the ploughing process in sands. In Computer Methods & Recent Advances in Geomechanics; Taylor & Francis Group: London, UK, 2015. [Google Scholar]
- Makange, N.R.; Ji, C.; Nyalala, I.; Sunusi, I.I.; Opiyo, S. Prediction of precise subsoiling based on analytical method, discrete element simulation and experimental data from soil bin. Sci. Rep. 2021, 11, 11082. [Google Scholar] [CrossRef]
- Askari, M.; Abbaspour-Gilandeh, Y.; Taghinezhad, E.; El Shal, A.M.; Hegazy, R.; Okasha, M.J.A. Applying the response surface methodology (RSM) approach to predict the tractive performance of an agricultural tractor during semi-deep tillage. Agriculture 2021, 11, 1043. [Google Scholar] [CrossRef]
- Zhou, W.; Song, C.; Sun, X.; Liu, Z.; Ni, X.; Shen, K.; Wang, Y.J.; Tian, L.J.A. Design of high-efficiency soil-returning liquid fertilizer deep-application furrow openers for improving furrowing performance in cold regions of Northeast China. Agriculture 2022, 12, 1286. [Google Scholar] [CrossRef]
- Barr, J.; Desbiolles, J.; Ucgul, M.; Fielke, J.M. Bentleg furrow opener performance analysis using the discrete element method. Biosyst. Eng. 2020, 189, 99–115. [Google Scholar]
- Ling, L.; Zhang, Q.; Xiao, X.; Wen, Z.; Jin, X. Integration of car-body flexibility into train–track coupling system dynamics analysis. Veh. Syst. Dyn. 2018, 56, 485–505. [Google Scholar]
- Liu, Z.; Wang, X.; Zheng, W.; Lv, Z.; Zhang, W. Design of a sweet potato transplanter based on a robot arm. Appl. Sci. 2021, 11, 9349. [Google Scholar]
- Yan, W.; Hu, M.; Li, K.; Wang, J.; Zhang, W.J.A. Design and experiment of horizontal transplanter for sweet potato seedlings. Agriculture 2022, 12, 675. [Google Scholar]
- Krutz, G.; Thompson, L.; Claar, P. Design of Agricultural Machinery; John Wiley & Sons: New York, NY, USA, 1984. [Google Scholar]
- Guangwei, W.; Xiaofei, A.; Bingxin, Y.; Liwei, L.; Yufan, H.; Zhijun, M. Design and Experiment of Automatic Transplanter for Sweet Potato Naked Seedlings Based on Pretreatment Seedling Belt. J. Agric. Mech. 2022, 53, 187–196. [Google Scholar]
- Shi-Qiang, P.; Zi-Fu, C.; Jiang, S.-S.; Jian-Qun, Y. Experimental Research on the Core Ploughshare Furrow Opener Based on the Discrete Element Method. In Proceedings of the 2014 International Conference on Mechanics and Civil Engineering (ICMCE-14), Wuhan, China, 13–14 December 2014; pp. 853–858. [Google Scholar]
- Hang, C.; Huang, Y.; Zhu, R. Analysis of the movement behaviour of soil between subsoilers based on the discrete element method. J. Terramech. 2017, 74, 35–43. [Google Scholar]
- Wang, J.; Xu, Y.; Wang, C.; Xiang, Y.; Tang, H. Design and simulation of a trenching device for rice straw burial and trenching based on MBD-DEM. Comput. Electron. Agric. 2023, 207, 107722. [Google Scholar]
- Solhjou, A.; Fielke, J.; Desbiolles, J. Effect of rake angle on soil movement induced by narrow point openers. In Proceedings of the Biennial Conference of the Australian Society for Engineering in Agriculture (SEAg), Surfers Paradice, QLD, Australia, 29–30 September 2011; pp. 28–30. [Google Scholar]
- Montazersadgh, F.; Mobrem, M. Structural Analysis Methodology for Space Deployable Structures Using Multi-Body Dynamic Analysis Solver. In Proceedings of the 2018 AIAA Modeling and Simulation Technologies Conference, Atlanta, GA, USA, 25–29 June 2018; p. 0421. [Google Scholar]
- Altenbuchner, C.; Hubbard, J.E., Jr. Modern Flexible Multi-Body Dynamics Modeling Methodology for Flapping Wing Vehicles; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Kim, S.; Choi, J.; Kim, J.-G.; Hatakeyama, R.; Kuribara, H.; Choi, J.H. Coupled simulation of elastohydrodynamics and multi-flexible body dynamics in piston-lubrication system. Adv. Mech. Eng. 2019, 11, 1687814019895855. [Google Scholar]
- Chen, J.J.G.U. Design and Research on the Control System of Precise Planting of Sweet Potato Seedlings. Ph.D. Thesis, Guangxi University, Nanning, China, 2021. [Google Scholar]
- Xu, J.; Bian, X. DEM Modeling of Vane Shear Test in Cohesive Solids. Environ. Vib. Transp. Geodyn. 2018, 7, 227–232. [Google Scholar]
- Aikins, K.A.; Ucgul, M.; Barr, J.B.; Jensen, T.A.; Antille, D.L.; Desbiolles, J.M.J.S.; Research, T. Determination of discrete element model parameters for a cohesive soil and validation through narrow point opener performance analysis. Soil Tillage Res. 2021, 213, 105123. [Google Scholar]
- Bingxin, Y.; Guangwei, W.; Weiqiang, F.; Nana, G.; Zhijun, M.; Peng, Z. Influencing Factors of Corn Implantation Distribution for High-height Planting Based on EDEM. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 47–54. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project Name | Numerical Value |
|---|---|
| Particle radius/mm | 3 |
| Density/(kg/m3) | 1850 |
| Poisson’s ratio | 0.38 |
| Shear modulus/pa | 106 |
| Collision recovery coefficient | 0.5 |
| Dynamic friction coefficient | 0.107 |
| Static friction coefficient | 0.313 |
| Code | Factor | ||
|---|---|---|---|
| The Spacing of the Wings x1/mm | The Height of Soil Backflow Port x2/mm | The Length of Soil Backflow Port x3/mm | |
| 1 | 65 | 80 | 170 |
| 0 | 60 | 70 | 155 |
| −1 | 55 | 60 | 140 |
| Serial Number | Factor | Planting Depth Y1/mm | Planting Posture Y2/mm | ||
|---|---|---|---|---|---|
| X1 | X2 | X3 | |||
| 1 | −1 | −1 | 0 | 35.21 | 70.05 |
| 2 | 1 | −1 | 0 | 55.37 | 79.36 |
| 3 | −1 | 1 | 0 | 56.39 | 83.49 |
| 4 | 1 | 1 | 0 | 45.37 | 80.21 |
| 5 | −1 | 0 | −1 | 52.69 | 79.38 |
| 6 | 1 | 0 | −1 | 48.32 | 81.52 |
| 7 | −1 | 0 | 1 | 37.28 | 85.29 |
| 8 | 1 | 0 | 1 | 52.38 | 88.96 |
| 9 | 0 | −1 | −1 | 51.24 | 69.28 |
| 10 | 0 | 1 | −1 | 59.21 | 76.91 |
| 11 | 0 | −1 | 1 | 51.25 | 78.25 |
| 12 | 0 | 1 | 1 | 52.39 | 81.39 |
| 13 | 0 | 0 | 0 | 54.85 | 87.84 |
| 14 | 0 | 0 | 0 | 53.71 | 91.28 |
| 15 | 0 | 0 | 0 | 55.28 | 87.54 |
| 16 | 0 | 0 | 0 | 56.94 | 89.57 |
| 17 | 0 | 0 | 0 | 51.28 | 90.58 |
| Variance Source | Planting Depth | Planting Posture | ||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | F Value | p Value | Sum of Squares | Degree of Freedom | F Value | p Value | |
| Model | 653. 37 | 9 | 24.12 | 0.0002 | 690.34 | 9 | 43.31 | <0.0001 |
| X1 | 49.35 | 1 | 16.40 | 0.0049 | 17.52 | 1 | 9.89 | 0.0163 |
| X2 | 51.46 | 1 | 17.10 | 0.0044 | 78.50 | 1 | 44.32 | 0.0003 |
| X3 | 41.22 | 1 | 13.70 | 0.0076 | 89.78 | 1 | 50.69 | 0.0002 |
| X1X2 | 243.05 | 1 | 80.76 | <0.0001 | 39.63 | 1 | 22.37 | 0.0021 |
| X1X3 | 94.77 | 1 | 31.49 | 0.0008 | 0.59 | 1 | 0.33 | 0.5834 |
| X2X3 | 11.66 | 1 | 3.88 | 0.0897 | 5.04 | 1 | 2.85 | 0.1355 |
| X12 | 156.21 | 1 | 51.91 | 0.0002 | 14.84 | 1 | 8.38 | 0.0232 |
| X22 | 0.23 | 1 | 0.08 | 0.7882 | 356.94 | 1 | 201.53 | <0.0001 |
| X32 | 1.80 | 1 | 0.60 | 0.4648 | 57.56 | 1 | 32.50 | 0.0007 |
| Residual error | 21.07 | 7 | 12.40 | 7 | ||||
| Misfit | 3.43 | 3 | 0.26 | 0.8519 | 1.56 | 3 | 0.1914 | 0.8972 |
| Error | 17.64 | 4 | 10.84 | 4 | ||||
| Summation | 674.38 | 16 | 702.73 | 16 | ||||
| Test Number | Planting Number N0 | Qualified Number of Planting Depth N1 | Qualified Number of Planting Posture N2 | Qualified Rate of Planting Depth W1/% | Qualified Rate of Planting Posture W2/% |
|---|---|---|---|---|---|
| 1 | 30 | 28 | 27 | 93.3 | 90.0 |
| 2 | 30 | 29 | 27 | 96.7 | 90.0 |
| 3 | 30 | 28 | 26 | 93.3 | 86.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Wang, S.; Zhang, A.; Xiao, Y.; Li, L.; Yin, Y.; Li, H.; Wen, C.; Yan, B. Optimized Design and Experiment of a Self-Covering Furrow Opener for an Automatic Sweet Potato Seedling Transplanting Machine. Sustainability 2023, 15, 13091. https://doi.org/10.3390/su151713091
Wu G, Wang S, Zhang A, Xiao Y, Li L, Yin Y, Li H, Wen C, Yan B. Optimized Design and Experiment of a Self-Covering Furrow Opener for an Automatic Sweet Potato Seedling Transplanting Machine. Sustainability. 2023; 15(17):13091. https://doi.org/10.3390/su151713091
Chicago/Turabian StyleWu, Guangwei, Shoujiang Wang, Anqi Zhang, Yuejin Xiao, Liwei Li, Yanxin Yin, Hanqing Li, Changkai Wen, and Bingxin Yan. 2023. "Optimized Design and Experiment of a Self-Covering Furrow Opener for an Automatic Sweet Potato Seedling Transplanting Machine" Sustainability 15, no. 17: 13091. https://doi.org/10.3390/su151713091
APA StyleWu, G., Wang, S., Zhang, A., Xiao, Y., Li, L., Yin, Y., Li, H., Wen, C., & Yan, B. (2023). Optimized Design and Experiment of a Self-Covering Furrow Opener for an Automatic Sweet Potato Seedling Transplanting Machine. Sustainability, 15(17), 13091. https://doi.org/10.3390/su151713091