5.1. Country-Specific Estimation
We first estimate the country-specific relationship between robot adoption and the labor market. To overcome the short time span in each country, we conduct the country-specific estimation using panel regression specified as follows:
where
is the cyclical component of total employment. Different from the baseline specification (Equation (1)),
is
matrix, where
is the number of observations in the unbalanced panel data and
is the number of countries. Each entry (
) equals the cyclical components of robot installation if such an entry belongs to country
, and zero if otherwise.
and
denote the time fixed effects and the error term, respectively. With this specification, we can estimate
as a
vector of country-specific coefficients.
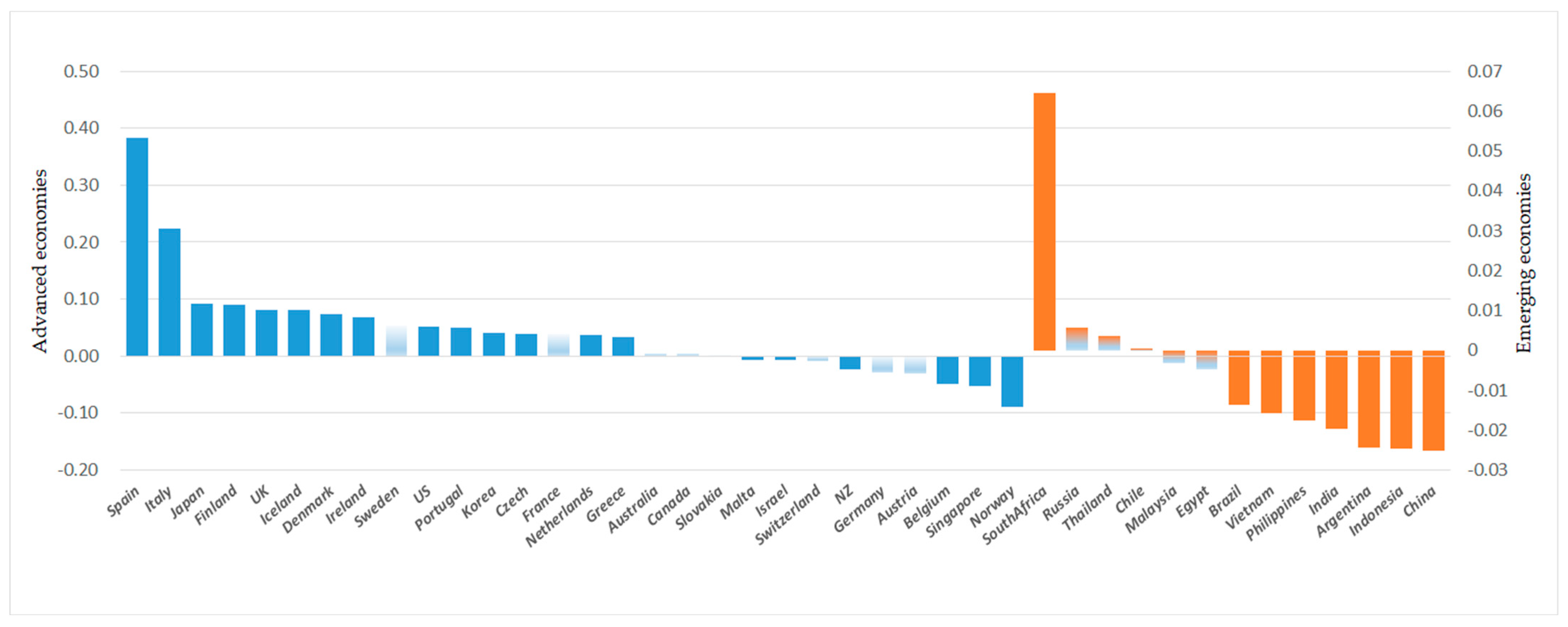
As shown in
Figure 3, the short-term elasticity of total employment to robots varies substantially among different countries, with an average of 0.041 for AEs and −0.011 for EMs. Among the total number of 28 AEs, the estimate is positive and statistically significant in 14 countries (Czech Republic, Denmark, Finland, Greece, Iceland, Ireland, Italy, Japan, Korea, The Netherlands, Portugal, Spain, UK, and the USA); negative and significant in 5 countries (Belgium, Marta, New Zealand, Norway, and Singapore). Among the 13 EMs, the estimate is negative and significant in 7 countries (Argentina, Brazil, China, India, Indonesia, the Philippines, and Vietnam), while statistically positive only in South Africa.
Utilizing these country-specific coefficient estimates, we can calculate their correlations with the factors of interest. Two groups of potential determinates of interest are drawn from the literature and they have been shown to affect the responsiveness of the labor market. The first group is related to macroeconomic conditions, including the overall development stage, unemployment rate, shares of manufacturing and service sectors, and overall education level. The second group relates to the institutional conditions, including business regulation, and structural reform in labor and product markets.
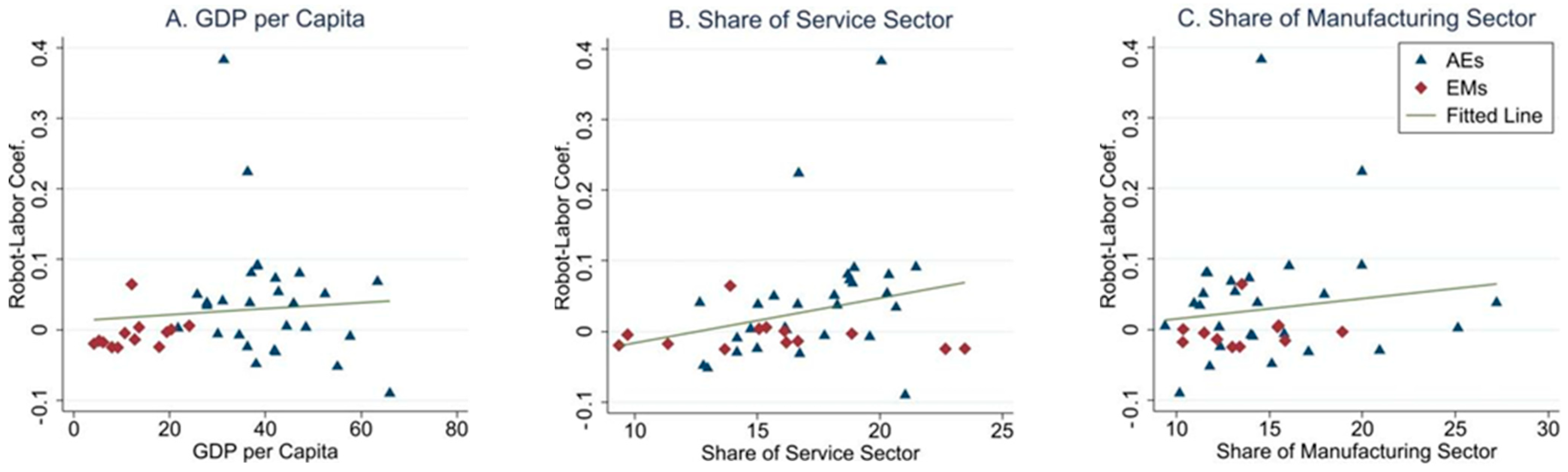
GDP per capita. As shown in
Figure 4 Panel A, country-specific coefficients are positively related to the level of GDP per capita, which is a proxy of the general stage of economic development. This is consistent with the baseline results by income groups. Bloom et al. [
3] argue that on the one hand, advanced countries generally have a steady demand for labor; and on the other hand, advanced countries also face an aging population and declining growth rate in labor supply. Such a combination makes an advanced economy more likely to benefit from faster employment growth from robot adoption.
Share of service sector. Berriman and Hawksworth [
34] argue that the development and application of robots will create new jobs and provide more employment opportunities, and these new jobs tend to appear in the service industry. Deming [
35] also discusses that with the development of computer technology, cognitive and creative jobs in the service industry become more difficult to be replaced, and employment growth is more likely to occur in jobs requiring high-level cognitive and social skills. Results in
Figure 4 Panel B support these arguments, and country-specific coefficients are positively related to the share of the service sector in total output.
Share of manufacturing sector. Autor and Dorn [
36] argue that labor in the manufacturing sector is easily replaced by machines, but the labor force which is replaced will shift to the service sector, in order to realize the re-employment. Dauth et al. [
20] and Mann and Puttmann [
37] also suggest that while robot adoption reduces the number of jobs in the manufacturing sector, it also increases the opportunity for employment in the service industry. Nevertheless, such a positive correlation between the share of the manufacturing sector and the short-term robot–labor coefficient (
Figure 4 Panel C) is somewhat surprising.
Unemployment rate. Ball et al. [
19] and Ball et al. [
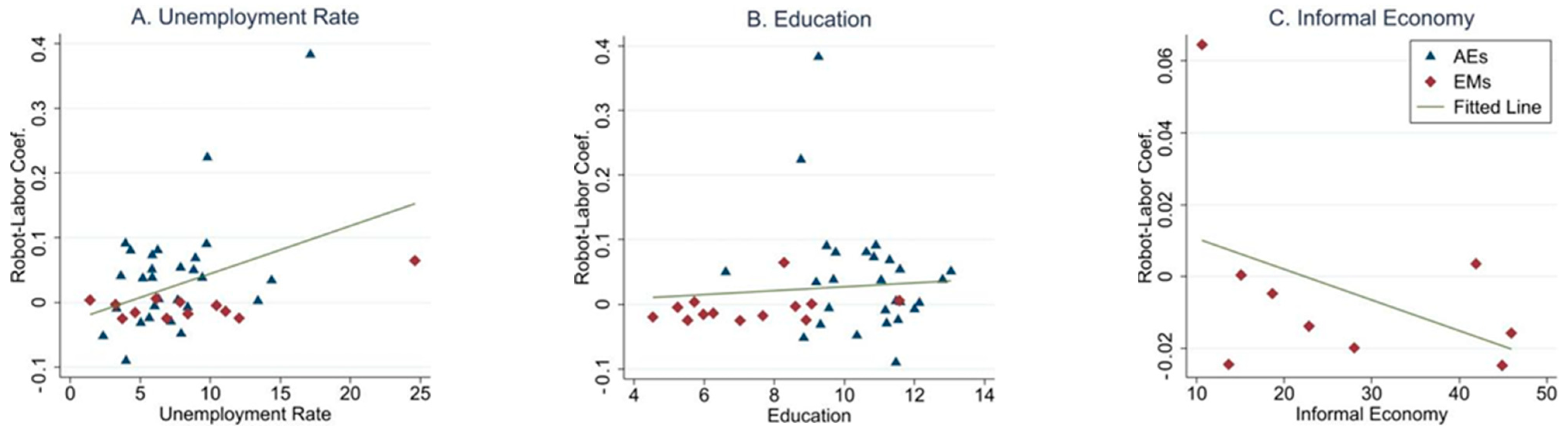
22] document a positive relationship between the Okun coefficient and the average level of unemployment in advanced countries and emerging economies, and they argue that in countries where the unemployment rate is higher, the labor market fluctuates more in response to aggregate economic conditions. In
Figure 5 Panel A, we show a similar correlation, that the higher the unemployment rate is, the greater the promotion effect of robot adoption on the labor market.
Education level. As shown in
Figure 5 Panel B, for countries with a lower level of education, the labor market is more likely to be hurt by robot adoption. The impact of education on the robot–labor relationship has been widely discussed in the literature. Among others, Acemoglu and Restrepo [
10] point out that the impact of robot adoption on the labor market is influenced by education, and robots show a more obvious substitution effect on low-educated and low-skilled labor. Aghion et al. [
38] find that uneducated workers were more likely to be negatively affected by robots than educated workers. Korinek and Stiglitz [
39] also point out that robots and AI would suppress the employment of low-skilled labor through two channels: efficiency wage effect and employment structure transformation, and this is due to the fact that low-skilled labor cannot adjust in a timely manner.
Informal economy. The wide existence and importance of informal or shadow economy have been studied in the literature [
40,
41]. Related to our study, Bernal-Verdugo et al. [
42] and Ball et al. [
22] find that the existence of an informal economy obscures the responsiveness of the formal market.
Figure 5 Panel C shows similar results that country-specific coefficients are negatively related to informal employment as a share of the total population.
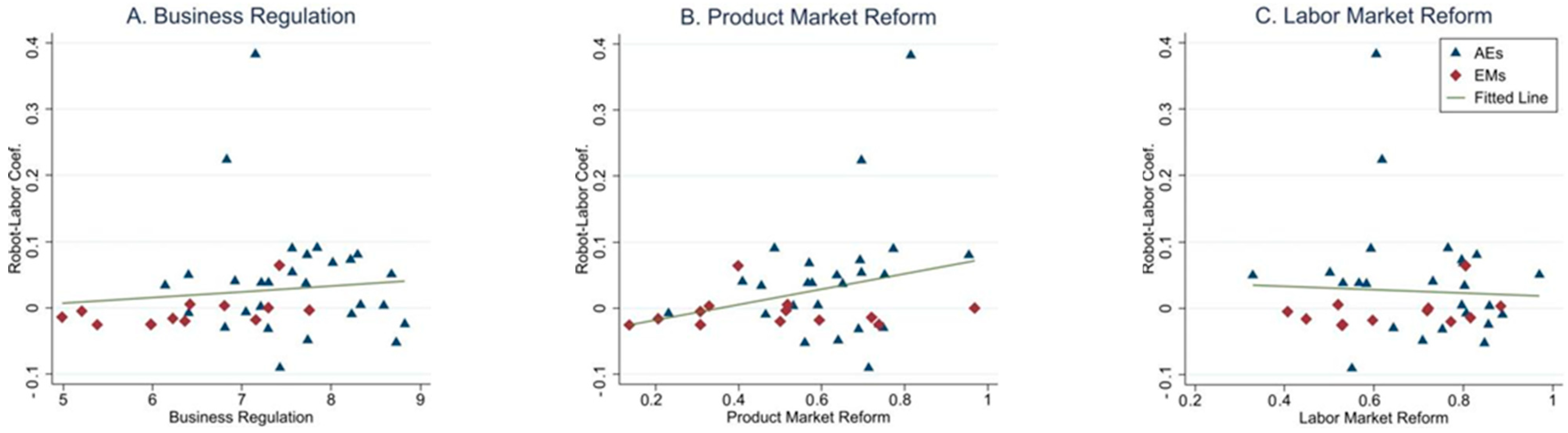
Business regulation. As for the institutional factors, many studies suggest that the responsiveness of the labor market depends on business regulations. For instance, in discussing hiring and firing regulations in Middle Eastern and North African (MENA) countries, Ahmed et al. [
43] argue that such regulations can discourage “firms from expanding employment in response to favorable changes in the economic climate”. That is, greater employment protection can dampen hiring and firing as output fluctuates, which in turn reduces the responsiveness of total employment.
Figure 6 Panel A shows supporting results that the country-specific coefficient is negatively related to the degree of business regulation.
Structural reforms. As for the structural reforms, we consider two fields particularly relevant to our study: product market reform measures the level of competition, state ownership, independent regulation, and government intervention; labor market reform measures the employment protection legislation (EPL) related to procedural requirements (such as third-party approval), firing costs (e.g., severance payments and note requirements, and grounds for dismissal with the possibility of redress). Economic theory suggests that structural reforms remove obstacles to an efficient allocation. As shown in
Figure 6, the country-specific coefficient is positively related to product market reform (Panels B), while it is negatively related to labor market reform (Panels C). In other words, countries with a higher level of product market reform or lower labor market reform are expected to benefit from faster employment growth from robot adoption.
5.2. Interacted Variable Analysis
As an alternative approach, we use an interacted variable analysis to explore the nonlinear relationship between robot adoption and the labor market. Specifically, we include an interaction term between the cyclical component of robot installation and each potential determinant, which can quantify how each factor alters the responsiveness of total employment to robot installation. In principle, the explanatory variable should interact with all potential factors in the same panel analysis system; however, due to high collinearity, we follow An et al. [
25] and restrict the interaction to one determinant at a time.
The candidate factors are drawn from the same pool of macroeconomic and institutional variables as the previous section. The interacted variable analysis complements the simple correlation analysis based on country-specific estimates. Though it cannot estimate the responsiveness of employment to robot installation for each country, it can directly quantify the amplifying or dampening impact of different factors. In our case, it also helps to overcome the data limitation of the short time span in robot installation data in each country.
Table 4 reports coefficient estimates of the interacted term, which captures the influence of each potential factor on the robot–labor relationship (
in Equation (4)). These results are consistent with those from the simple correlation analysis above. As expected, countries in an advanced development stage (proxied by GDP per capita) tend to have a positive and greater association between robot installation and the labor market (0.018 ***), and this is mainly driven by AEs. The share of service sector in total output amplifies the responsiveness of total employment to robot installation in AEs (0.752 ***), while the share of the manufacturing sector amplifies the responsiveness in EMs (0.313 **).
Among other macroeconomic variables in labor markets, the unemployment rate amplifies the responsiveness of total employment to robot installation, with a 1 percentage point increase in the unemployment rate, the coefficient increases by 0.091, and this is also driven by AEs. Countries with a higher level of education tend to benefit more from robot adoption. Data on the informal economy are available only in EMs, and the results show that for countries with a higher level of informal economy, their labor markets tend to have a more negative response to AI development. As for the institutional variables, EMs with a higher level of business regulation tend to benefit a faster employment growth (0.016 *) from robot adoption. Between two structural reform indicators, product market reform amplifies the robot–labor relationship in AEs (0.058 *), and labor market reform matters mainly in EMs (0.064 ***).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





