
ELM-Based Non-Singular Fast Terminal Sliding Mode Control Strategy for Vehicle Platoon


Abstract
:1. Introduction
- It reduces the number of drivers and reduces the cost of labor.
- No driving hazards caused by fatigue driving, which improves safety;
- Automatic control allows more precise control of output power, thus reducing energy consumption and being more environmentally friendly.
- Automatic control makes the ability to adjust the spacing more accurate, and reducing the distance can increase the efficiency of the road.
- For vehicles with the large windward areas, such as trucks, intensive workshop distance control can effectively reduce the power loss caused by wind resistance.
2. Related Work/Literature Review
3. Mathematical Derivation of the Vehicle Dynamics Model
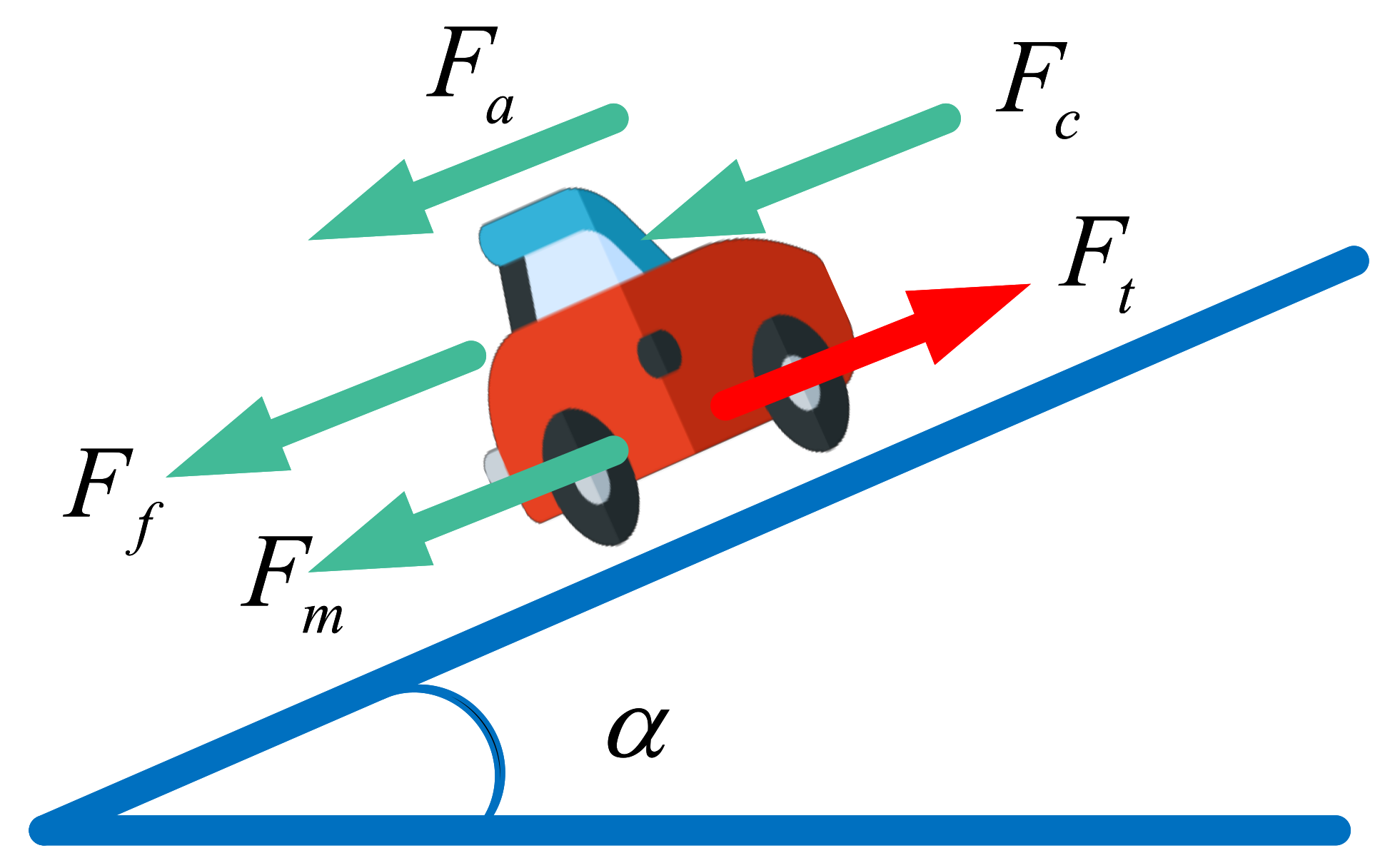
3.1. Single Vehicle Dynamics
3.2. Description of Platoon Longitudinal Dynamics
4. Problem Formulation and Controller Design for Vehicle Platoon
4.1. The Principle of Non-Singular Fast Terminal Sliding Mode Control
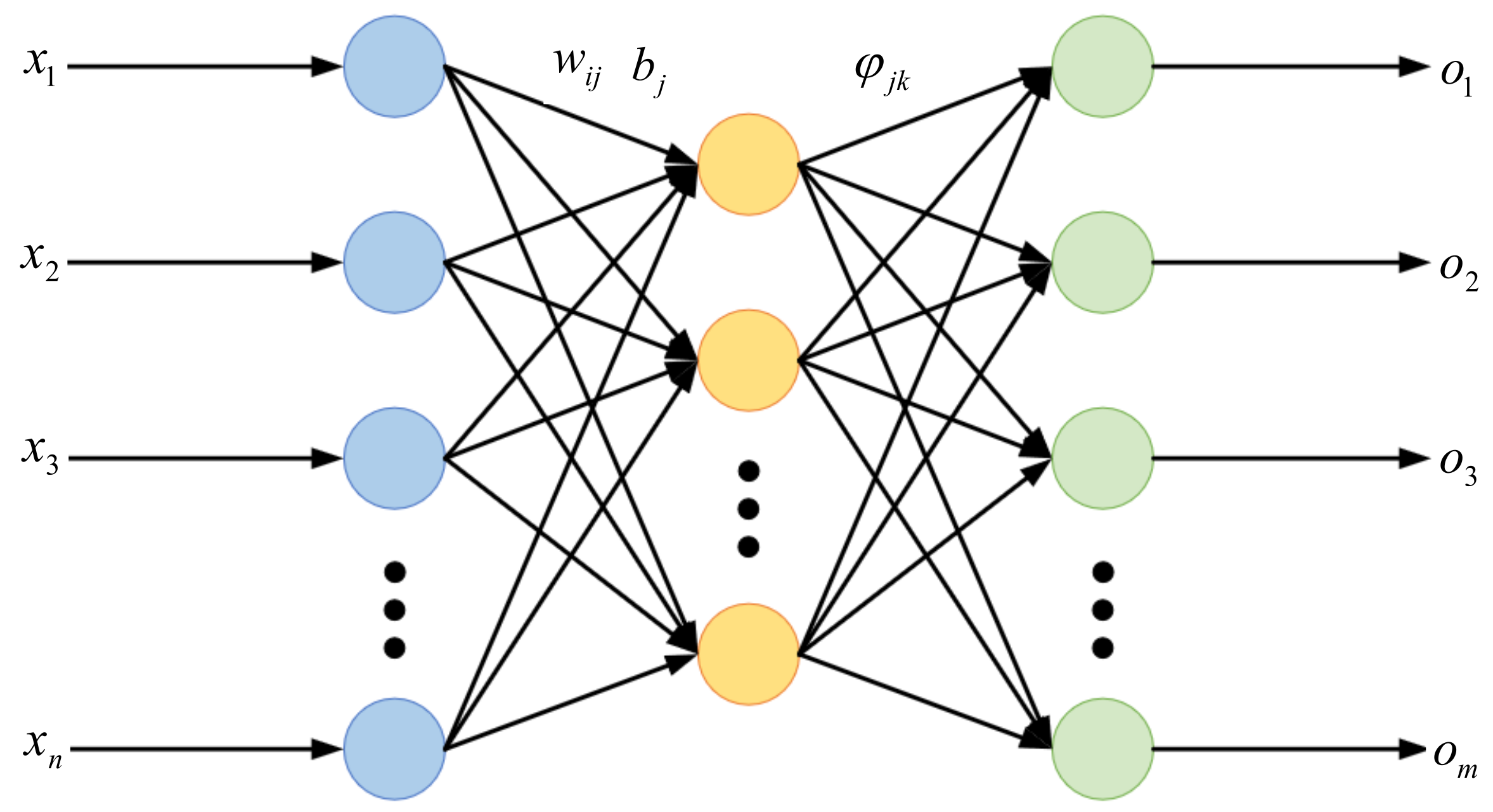
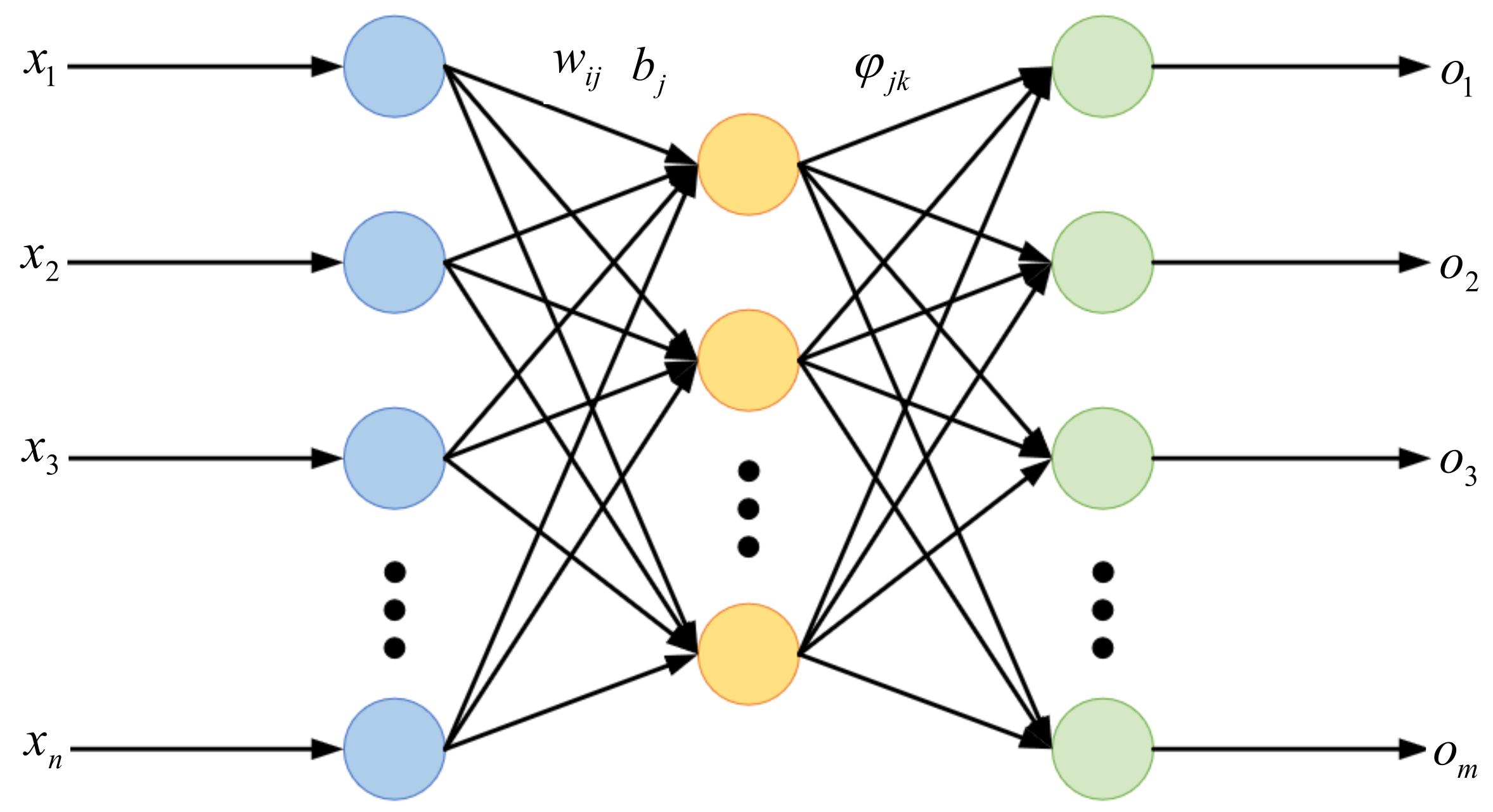
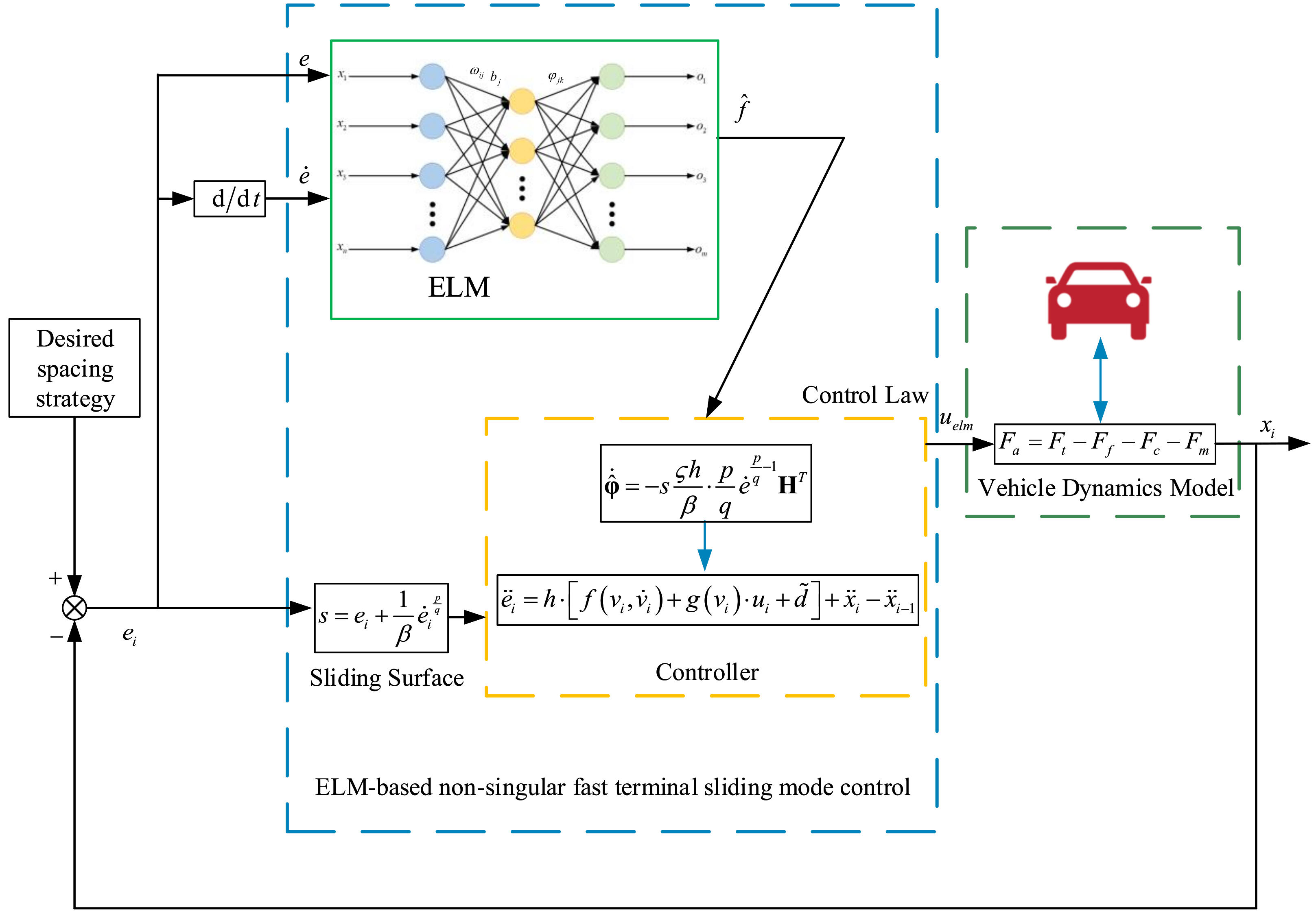
4.2. Extreme Learning Machine Optimized NFT-SMC
5. Experiments
5.1. Experimental Parameter Configuration
5.2. Simulation Experiment and Result Analysis
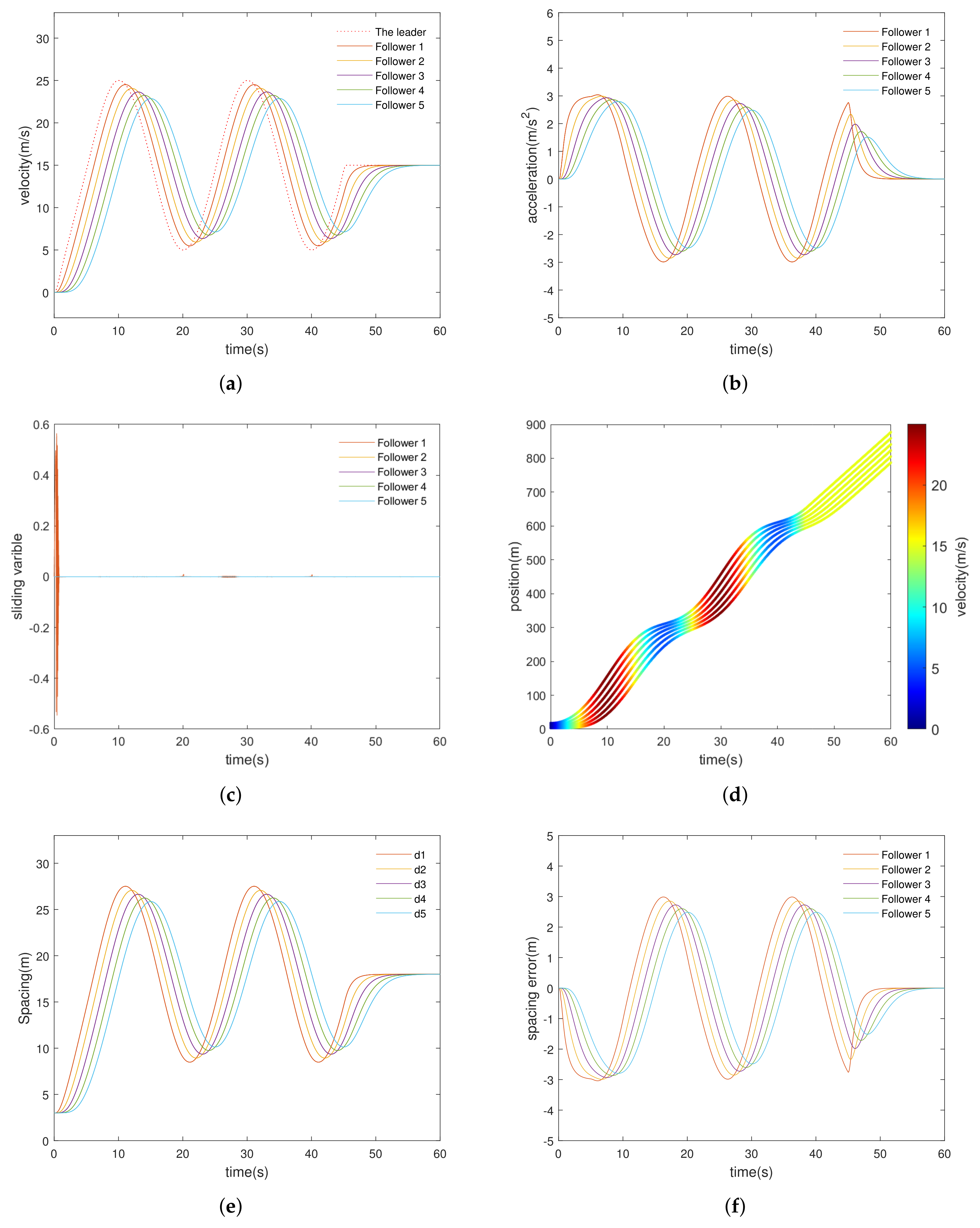
5.2.1. Experiment with Different Types of Scenes
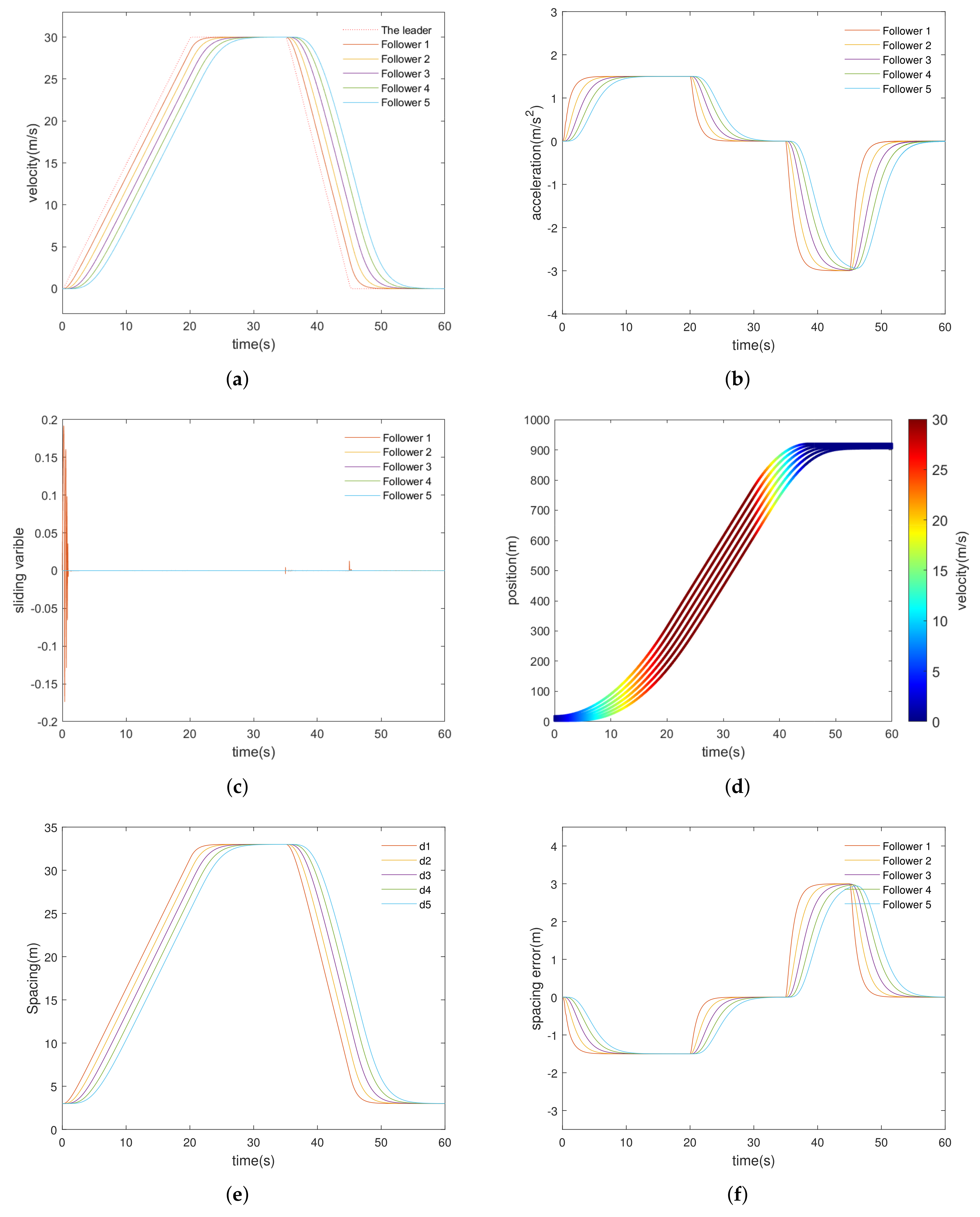
- Scenario A:
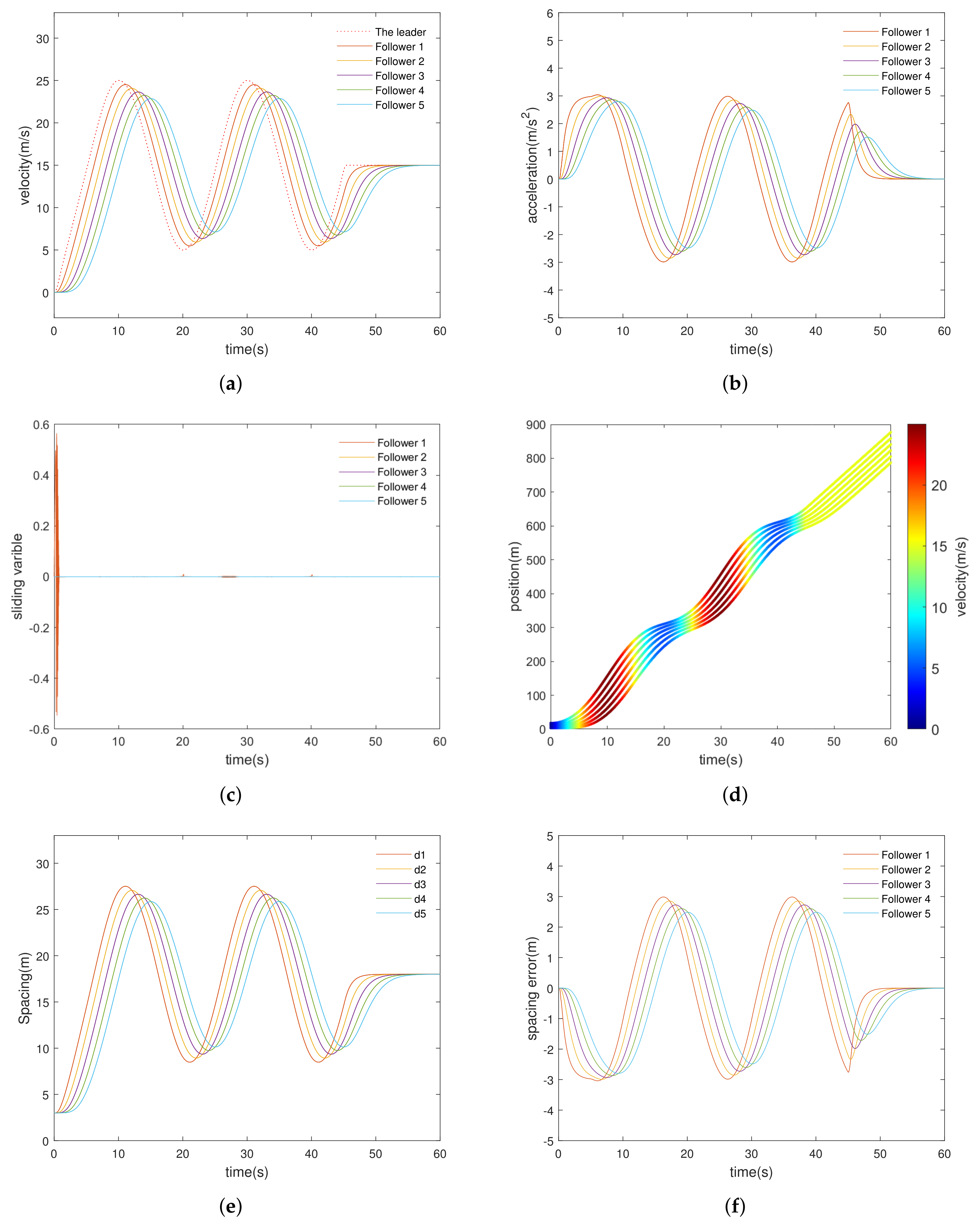
- Scenario B:
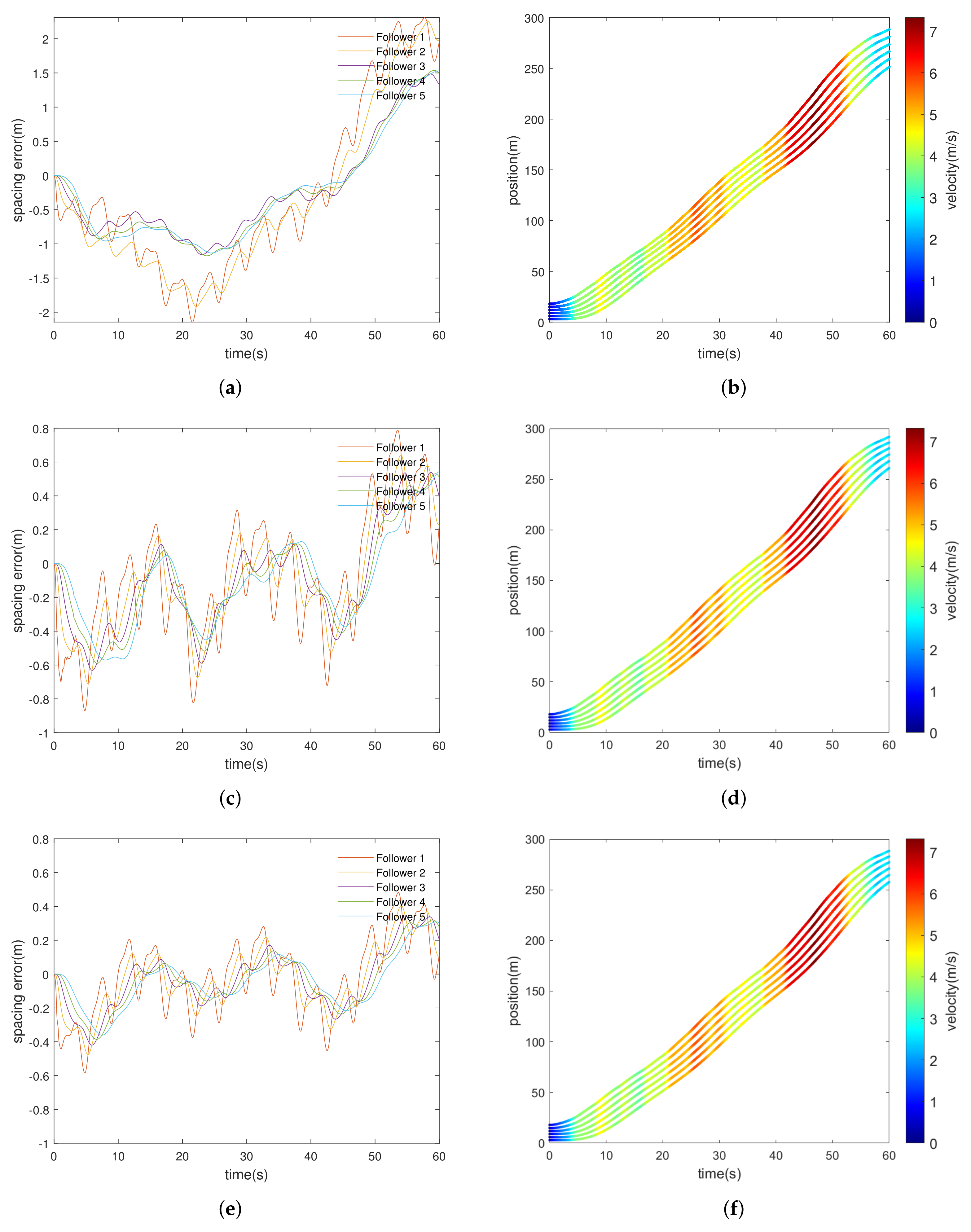
5.2.2. Comparison Experiment
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Beaver, L.; Malikopoulos, A. Constraint-Driven Optimal Control of Multiagent Systems: A Highway Platooning Case Study. IEEE Control Syst. Lett. 2021, 6, 1754–1759. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M. A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2884–2891. [Google Scholar] [CrossRef] [Green Version]
- Lakshmi, D.; Bart, D.; Hans, H. Optimal routing for automated highway systems. Transp. Res. Part C Emerg. Technol. 2013, 30, 1–22. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Yang, Y.; Wu, H.; Zhang, W.; Zhao, J.; Xiong, Y. Traffic flow prediction by an ensemble framework with data denoising and deep learning model. Phys. A Stat. Mech. Appl. 2021, 565, 125574. [Google Scholar] [CrossRef]
- Adil, A.; Anjan, R.; James, W.; Jim, M. Adapting time headway in cooperative adaptive cruise control to network reliability. IEEE Trans. Veh. Technol. 2021, 70, 12691–12702. [Google Scholar] [CrossRef]
- Roh, C.; Jeon, H.; Son, B. Do heavy vehicles always have a negative effect on traffic flow? Appl. Sci. 2021, 11, 5520. [Google Scholar] [CrossRef]
- Mirzaeinia, A.; Heppner, F.; Hassanalian, M. An analytical study on leader and follower switching in V-shaped Canada Goose flocks for energy management purposes. Swarm Intell. 2020, 14, 117–141. [Google Scholar] [CrossRef]
- Gungor, O.; She, R.; Al-Qadi, I.; Ouyang, Y. One for all: Decentralized optimization of lateral position of autonomous trucks in a platoon to improve roadway infrastructure sustainability. Transp. Res. Part C Emerg. Technol. 2020, 2020, 102783. [Google Scholar] [CrossRef]
- Keely, V. Distributed Cooperative Control of Heterogeneous Multi-Vehicle Platoons. Master’s Thesis, University of Rhode Island, South Kingstown, RI, USA, 2017. [Google Scholar] [CrossRef]
- Pipes, L. An operational analysis of traffic dynamics. J. Appl. Phys. 1953, 24, 274–281. [Google Scholar] [CrossRef]
- Levine, W.; Athans, M. On the optimal error regulation of a string of moving vehicles. IEEE Trans. Autom. Control 1966, 11, 355–361. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K. String stability of interconnected systems. IEEE Trans. Autom. Control 1996, 41, 349–357. [Google Scholar] [CrossRef]
- Prakash, R.; Manivannan, P.V. Simplified node decomposition and platoon head selection: A novel algorithm for node decomposition in vehicular ad hoc networks. Artif. Life Robot. 2017, 22, 44–50. [Google Scholar] [CrossRef]
- Huang, C.M.; Lin, T.H.; Tseng, K.C. Bandwidth Aggregating over VANET Using the On-Demand Member-Centric Routing Protocol (OMR). In Proceedings of the 2012 12th International Symposium on Pervasive Systems, Algorithms and Networks, San Marcos, TX, USA, 13–15 December 2012; Volume 22, pp. 89–95. [Google Scholar] [CrossRef]
- McAree, O.; Veres, S.M. Lateral control of vehicle platoons with on-board sensing and Inter-Vehicle Communication. In Proceedings of the European Control Conference (ECC), Aalborg, Denmark, 19 June–1 July 2016; pp. 2465–2470. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.X.; Liu, T.T.; Kim, B.; Lin, C.W.; Shiraishi, S.; Xie, J.; Han, Z. Architectural Design Alternatives Based on Cloud/Edge/Fog Computing for Connected Vehicles. IEEE Commun. Surv. Tutorials 2020, 22, 2349–2377. [Google Scholar] [CrossRef]
- Pourghebleh, B.; Navimipour, N.J. Towards efficient data collection mechanisms in the vehicular ad hoc networks. Int. J. Commun. Syst. 2019, 32, e3893. [Google Scholar] [CrossRef]
- Peng, H.X.; Liang, L.; Shen, X.M.; Li, G.Y. Vehicular Communications: A Network Layer Perspective. IEEE Trans. Veh. Technol. 2019, 68, 1064–1078. [Google Scholar] [CrossRef] [Green Version]
- Skoufas, K.; Spyrou, E.D.; Mitrakos, D. Low Cost V2X Traffic Lights and Vehicles Communication Solution for Dynamic Routing. In Proceedings of the 8th International Conference on Telecommunications and Remote sensing (ICTRS 2019), Rhodes, Greece, 16–17 September 2019; pp. 56–65. [Google Scholar] [CrossRef]
- Vasebi, S.; Hayeri, Y.M. Collective Driving to Mitigate Climate Change: Collective-Adaptive Cruise Control. Sustainability 2021, 13, 8943. [Google Scholar] [CrossRef]
- Yang, L.; Sun, D.; Xie, F.; Zhu, J. Study of autonomous platoon vehicle longitudinal modeling. In Proceedings of the IET International Conference on Intelligent and Connected Vehicles(ICV 2016), Chongqing, China, 22–26 September 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Lee, G.; Chwa, D. Decentralized behavior-based formation control of multiple robots considering obstacle avoidance. Intell. Serv. Robot. 2017, 11, 127–138. [Google Scholar] [CrossRef]
- Balch, T.; Arkin, R.C. Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom. 1998, 14, 926–939. [Google Scholar] [CrossRef] [Green Version]
- Rasekhipour, Y.; Khajepour, A.; Chen, S.K.; Litkouhi, B. A Potential Field-Based Model Predictive Path-Planning Controller for Autonomous Road Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1255–1267. [Google Scholar] [CrossRef]
- Huang, Y.J.; Ding, H.T.; Zhang, Y.B.; Wang, H.; Cao, D.P.; Xu, N.; Hu, C. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field Elaborated Resistance Network Approach. IEEE Trans. Ind. Electron. 2020, 67, 1376–1386. [Google Scholar] [CrossRef]
- Li, L.H.; Gan, J.; Qu, X.; Lu, W.Q.; Mao, P.P.; Ran, B. A Dynamic Control Method for Cavs Platoon Based on the MPC Framework and Safety Potential Field Model. KSCE J. Civ. Eng. 2021, 25, 1874–1886. [Google Scholar] [CrossRef]
- Hong, C.H.; Shan, H.G.; Song, M.Y.; Zhuang, W.H.; Xiang, Z.Y.; Wu, Y.X.; Yu, X.L. A Joint Design of Platoon Communication and Control Based on LTE-V2V. IEEE Trans. Veh. Technol. 2020, 69, 15893–15907. [Google Scholar] [CrossRef]
- Firoozi, R.; Zhang, X.; Borrelli, F. Formation and reconfiguration of tight multi-lane platoons. Control Eng. Pract. 2021, 108, 104714–104726. [Google Scholar] [CrossRef]
- Chai, X.F.; Liu, J.; Yu, Y.; Sun, C.Y. Observer-based self-triggered control for time-varying formation of multi-agent systems. Sci. China Inf. Sci. 2021, 64, 132205. [Google Scholar] [CrossRef]
- Li, L.H.; Gan, J.; Qu, X.; Mao, P.P.; Yi, Z.W.; Ran, B. A Novel Graph and Safety Potential Field Theory-Based Vehicle Platoon Formation and Optimization Method. Appl. Sci. 2021, 11, 958. [Google Scholar] [CrossRef]
- Yang, Z.S.; Yu, Y.; Yu, D.X.; Zhou, H.X.; Mo X, L. APF-Based Car Following Behavior Considering Lateral Distance. Adv. Mech. Eng. 2013, 5, 207104. [Google Scholar] [CrossRef]
- Nair, R.R.; Karki, H.; Shukla, A.; Behera, L.; Jamshidi, M. Fault-Tolerant Formation Control of Nonholonomic Robots Using Fast Adaptive Gain Nonsingular Terminal Sliding Mode Control. IEEE Trans. Syst. Man-Cybern.-Syst. 2019, 13, 1006–1017. [Google Scholar] [CrossRef]
- Liu, A.D.; Zhang, W.A.; Yu, L.; Yan, H.C.; Zhang, R.C. Formation Control of Multiple Mobile Robots Incorporating an Extended State Observer and Distributed Model Predictive Approach. IEEE Trans. Syst. Man-Cybern.-Syst. 2020, 50, 4587–4597. [Google Scholar] [CrossRef]
- Lan, J.L.; Zhao, D.Z. Min-Max Model Predictive Vehicle Platooning With Communication Delay. IEEE Trans. Veh. Technol. 2020, 69, 12570–12584. [Google Scholar] [CrossRef]
- Mao, R.; Gao, H.; Guo, L. A Novel Collision-Free Navigation Approach for Multiple Nonholonomic Robots Based on ORCA and Linear MPC. Math. Probl. Eng. 2020, 4183427. [Google Scholar] [CrossRef]
- Liang, X.W.; Liu, Y.H.; Wang, H.S.; Chen, W.D.; Xing, K.X.; Liu, T. Leader-Following Formation Tracking Control of Mobile Robots Without Direct Position Measurements. IEEE Trans. Autom. Control 2016, 61, 4131–4137. [Google Scholar] [CrossRef]
- Defoort, M.; Floquet, T.; Kokosy, A.; Perruquetti, W. Sliding-Mode Formation Control for Cooperative Autonomous Mobile Robots. IEEE Trans. Ind. Electron. 2008, 55, 3944–3953. [Google Scholar] [CrossRef] [Green Version]
- Qian, D.W.; Tong, S.W.; Li, C.D. Leader-Following Formation Control of Multiple Robots with Uncertainties through Sliding Mode and Nonlinear Disturbance Observer. Etri J. 2016, 38, 1008–1018. [Google Scholar] [CrossRef]
- Yuan, Z.Y.; Tian, Y.X.; Yin, Y.F.; Wang, S.Y.; Liu, J.X.; Wu, L.G. Trajectory tracking control of a four mecanum wheeled mobile platform: An extended state observer-based sliding mode approach. IET Control Theory Appl. 2020, 14, 415–426. [Google Scholar] [CrossRef]
- Reza, N.J. Vehicle Dynamics: Theory and Application; Springer Science+Business Media: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Yu, Z.S. Automobile Theory; China Machine Press: Beijing, China, 2019; ISBN 9787111602392. [Google Scholar]
- Liu, S.; Liu, L.; Tang, J.; Yu, B.; Wang, Y.; Shi, W. Edge Computing for Autonomous Driving: Opportunities and Challenges. Proc. IEEE 2019, 107, 1697–1716. [Google Scholar] [CrossRef]
- Yaqoob, I.; Khan, L.; Kazmi, S.; Imran, M.; Guizani, N.; Hong, C. Autonomous Driving Cars in Smart Cities: Recent Advances, Requirements, and Challenges. IEEE Netw. 2019, 34, 174–181. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Huang, G.; Huang, G.B.; Song, S.J.; You, K.Y. Trends in extreme learning machines: A review. Neural Netw. 2015, 61, 32–48. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Configuration | |
|---|---|---|
| Value | Unit | |
| Vehicle sprung mass | 1200 | kg |
| Length of vehicle | 2200 | mm |
| 160 | N/m | |
| 0.3 | ||
| 0.02 | - | |
| g | 10 | |
| 0.3 | - | |
| CTH h | 1 | s |
| m/s | ||
| m | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Du, Y. ELM-Based Non-Singular Fast Terminal Sliding Mode Control Strategy for Vehicle Platoon. Sustainability 2022, 14, 4020. https://doi.org/10.3390/su14074020
Wang C, Du Y. ELM-Based Non-Singular Fast Terminal Sliding Mode Control Strategy for Vehicle Platoon. Sustainability. 2022; 14(7):4020. https://doi.org/10.3390/su14074020
Chicago/Turabian StyleWang, Chengmei, and Yuchuan Du. 2022. "ELM-Based Non-Singular Fast Terminal Sliding Mode Control Strategy for Vehicle Platoon" Sustainability 14, no. 7: 4020. https://doi.org/10.3390/su14074020
APA StyleWang, C., & Du, Y. (2022). ELM-Based Non-Singular Fast Terminal Sliding Mode Control Strategy for Vehicle Platoon. Sustainability, 14(7), 4020. https://doi.org/10.3390/su14074020