
Effects of Social Robotics in Promoting Physical Activity in the Shared Workspace


Abstract
:1. Introduction
- Evidence that a social robot-based service system is effective in intervening in sedentary behaviors in the shared workspace with enhanced intrinsic motivations and acute emotional and mental benefits.
- Design implications that leverage social robot systems for promoting physically active behaviors in the shared workspace.
2. The Design of Anti-Sedentary Robot
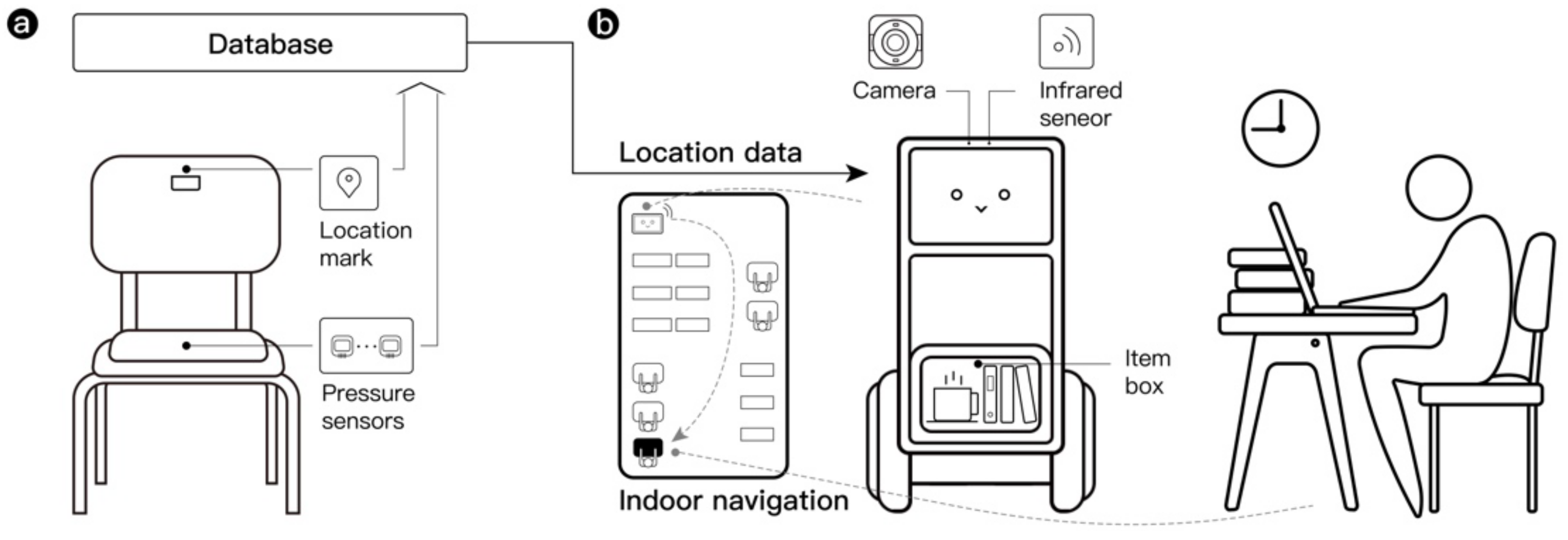
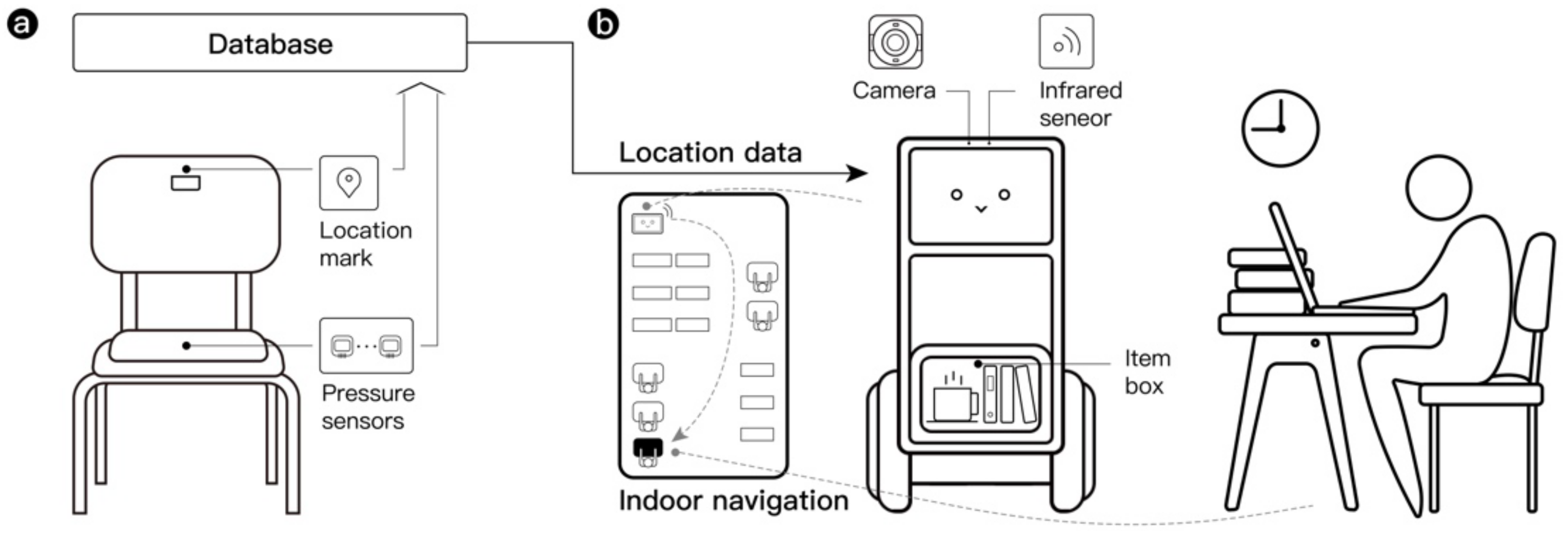
2.1. The Design Concept
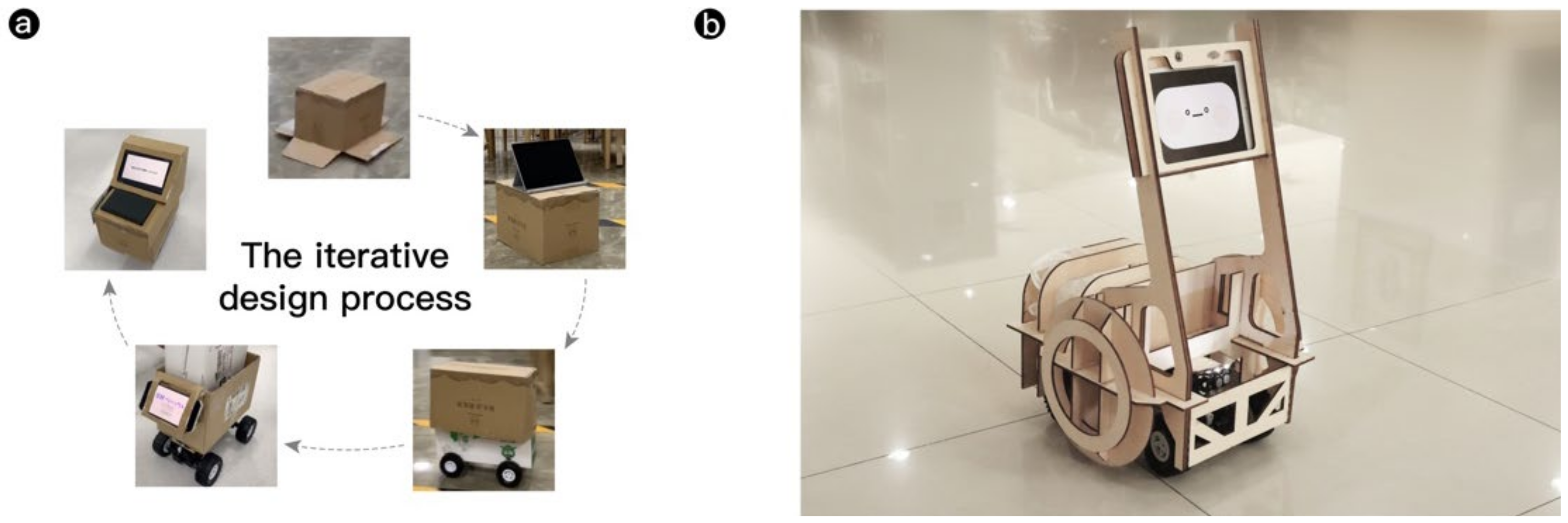
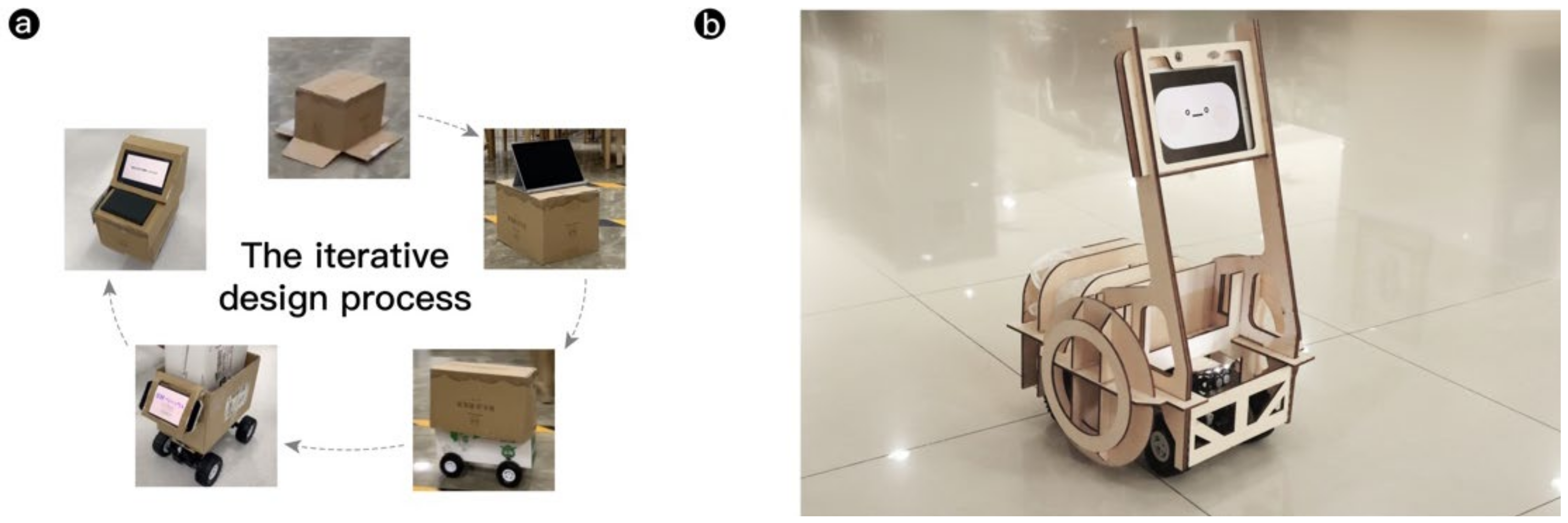
2.2. Development of the Wizard-of-Oz Prototype
3. The Study
3.1. Study Design and Hypothses
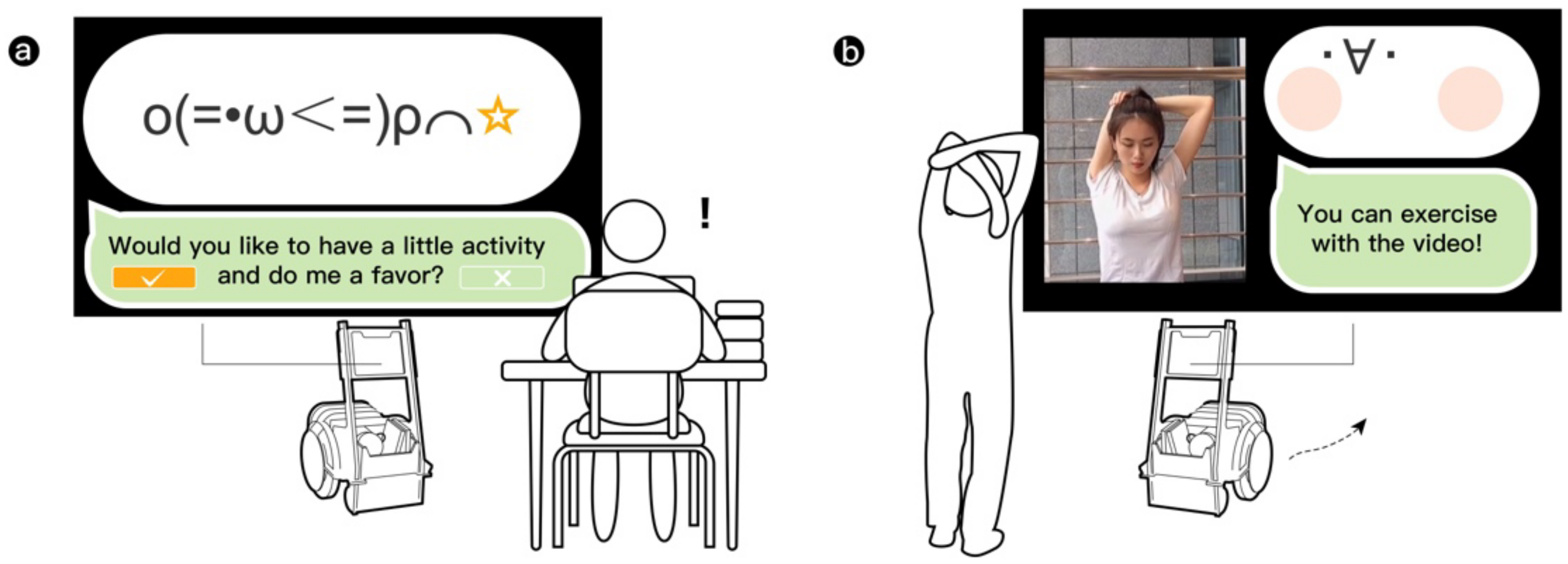
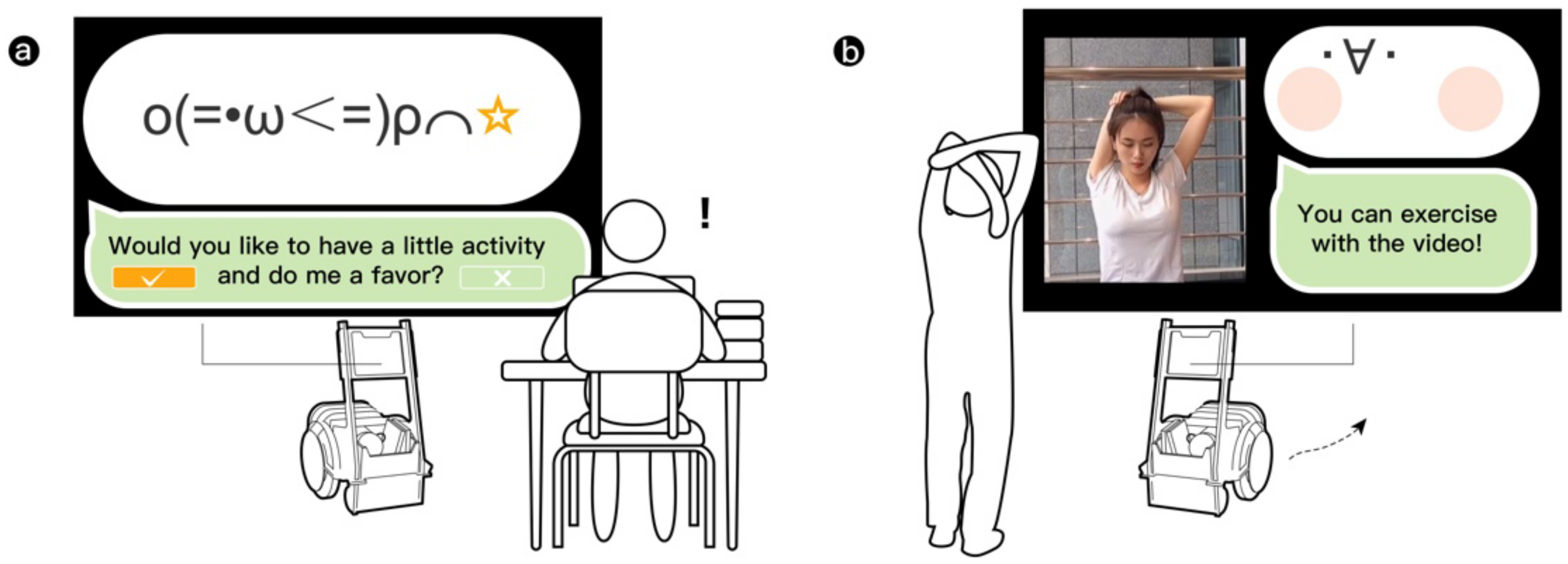
- The robot-guided intervention (RGI): The Anti-Sedentary Robot reminds users of their sedentary period duration by inviting them to return books and facilitates upper body stretching while performing the voluntary task.
- The human-guided intervention (HGI): A colleague reminds users of their sedentary time by inviting them to return books and offering guidance to complete upper body stretching exercises afterward.
3.2. Setup
3.3. Participants
3.4. Procedure
3.5. Measurements
3.6. Data Analysis
4. Results
4.1. Quantitative Analysis
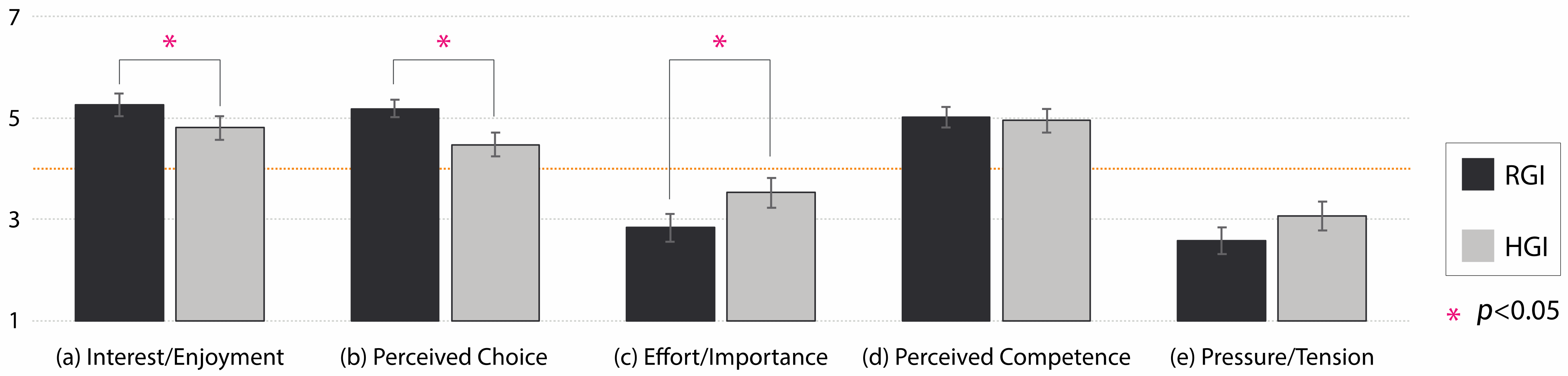
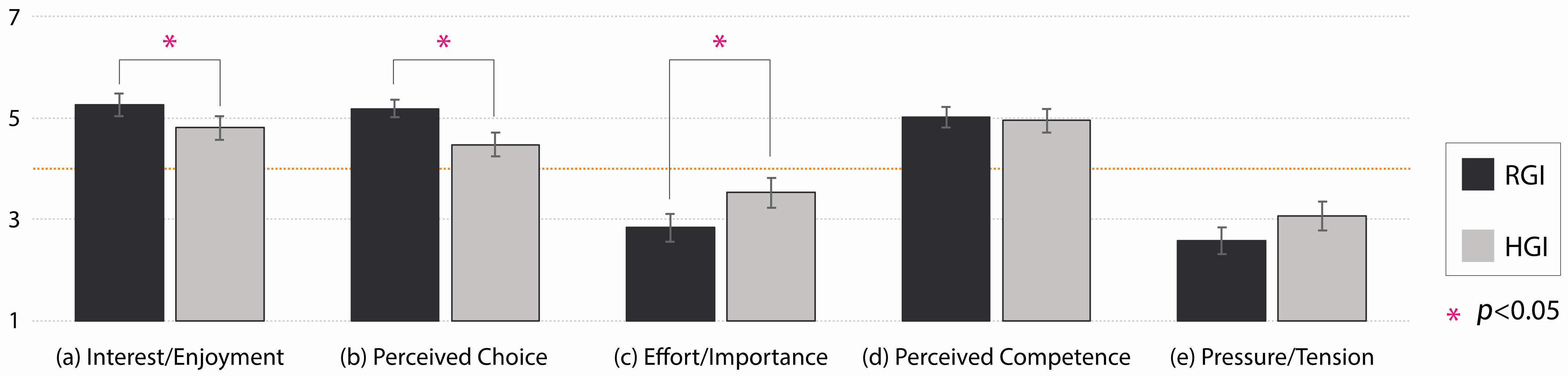
4.1.1. Intrinsic Motivation
4.1.2. Acute Benefits
4.2. Interview Results
4.2.1. Benefits of Anti-Sedentary Robot
4.2.2. Design Challenges
5. Discussion
5.1. Research Implications
5.2. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Harris, R. New Organisations and New Workplaces. J. Corp. Real Estate 2016, 18, 4–16. [Google Scholar] [CrossRef]
- Swezey, C. An Exploration of WeWork: A Series of Paradoxes in the Coworking Space. University Senior Theses, Princeton University, Princeton, NJ, USA, 2019. [Google Scholar]
- Bouncken, R.B.; Reuschl, A.J. Coworking-Spaces: How a Phenomenon of the Sharing Economy Builds a Novel Trend for the Workplace and for Entrepreneurship. Rev. Manag. Sci. 2018, 12, 317–334. [Google Scholar] [CrossRef]
- Ansio, H.; Käpykangas, S.; Houni, P. Community and Collaboration in a Shared Multi-Space Office. Nord. J. Work. Life Stud. 2020, 10, 63–83. [Google Scholar] [CrossRef]
- Olsen, H.M.; Brown, W.J.; Kolbe-Alexander, T.; Burton, N.W. Physical Activity and Sedentary Behaviour in a Flexible Office-based Workplace: Employee Perceptions and Priorities for Change. Health Promot. J. Aust. 2018, 29, 344–352. [Google Scholar] [CrossRef] [Green Version]
- Teychenne, M.; Ball, K.; Salmon, J. Sedentary Behavior and Depression among Adults: A Review. Int. J. Behav. Med. 2010, 17, 246–254. [Google Scholar] [CrossRef]
- Nooijen, C.F.; Kallings, L.V.; Blom, V.; Ekblom, Ö.; Forsell, Y.; Ekblom, M.M. Common Perceived Barriers and Facilitators for Reducing Sedentary Behaviour among Office Workers. Int. J. Environ. Res. Public Health 2018, 15, 792. [Google Scholar] [CrossRef] [Green Version]
- Lee, E.; Kim, Y. Effect of University Students’ Sedentary Behavior on Stress, Anxiety, and Depression. Perspect. Psychiatr. Care 2019, 55, 164. [Google Scholar] [CrossRef] [Green Version]
- Damen, I.; Brombacher, H.; Lallemand, C.; Brankaert, R.; Brombacher, A.; van Wesemael, P.; Vos, S. A Scoping Review of Digital Tools to Reduce Sedentary Behavior or Increase Physical Activity in Knowledge Workers. Int. J. Environ. Res. Public Health 2020, 17, 499. [Google Scholar] [CrossRef] [Green Version]
- Cole, J.A.; Tully, M.A.; Cupples, M.E. “They Should Stay at Their Desk until the Work’s Done”: A Qualitative Study Examining Perceptions of Sedentary Behaviour in a Desk-Based Occupational Setting. BMC Res. Notes 2015, 8, 683. [Google Scholar] [CrossRef] [Green Version]
- Sallis, J.; Bauman, A.; Pratt, M. Environmental and Policy Interventions to Promote Physical Activity. Am. J. Prev. Med. 1998, 15, 379–397. [Google Scholar] [CrossRef]
- Bauman, A.E.; Reis, R.S.; Sallis, J.F.; Wells, J.C.; Loos, R.J.; Martin, B.W.; Lancet Physical Activity Series Working Group. Correlates of Physical Activity: Why Are Some People Physically Active and Others Not? Lancet 2012, 380, 258–271. [Google Scholar] [CrossRef]
- Lin, J.J.; Mamykina, L.; Lindtner, S.; Delajoux, G.; Strub, H.B. Fish’n’Steps: Encouraging Physical Activity with an Interactive Computer Game. In International Conference on Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2006; pp. 261–278. [Google Scholar]
- Ahtinen, A.; Andrejeff, E.; Vuolle, M.; Väänänen, K. Walk as You Work: User Study and Design Implications for Mobile Walking Meetings. In Proceedings of the 9th Nordic Conference on Human-Computer Interaction, Gothenburg, Sweden, 23–27 October 2016; pp. 1–10. [Google Scholar]
- Ren, X.; Yu, B.; Lu, Y.; Brombacher, A. Exploring Cooperative Fitness Tracking to Encourage Physical Activity among Office Workers. Proc. ACM Hum. Comput. Interact. 2018, 2, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Foster, D.; Linehan, C.; Kirman, B.; Lawson, S.; James, G. Motivating Physical Activity at Work: Using Persuasive Social Media for Competitive Step Counting. In Proceedings of the 14th International Academic MindTrek Conference: Envisioning Future Media Environments, Gothenburg, Sweden, 23–27 October 2016; pp. 111–116. [Google Scholar]
- Gui, X.; Chen, Y.; Caldeira, C.; Xiao, D.; Chen, Y. When Fitness Meets Social Networks: Investigating Fitness Tracking and Social Practices on Werun. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 1647–1659. [Google Scholar]
- Chung, C.-F.; Gorm, N.; Shklovski, I.A.; Munson, S. Finding the Right Fit: Understanding Health Tracking in Workplace Wellness Programs. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 4875–4886. [Google Scholar]
- Shin, J.-G.; Onchi, E.; Reyes, M.J.; Song, J.; Lee, U.; Lee, S.-H.; Saakes, D. Slow Robots for Unobtrusive Posture Correction. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–10. [Google Scholar]
- Fujita, K.; Suzuki, A.; Takashima, K.; Ikematsu, K.; Kitamura, Y. TiltChair: Manipulative Posture Guidance by Actively Inclining the Seat of an Office Chair. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–14. [Google Scholar]
- Severinson-Eklundh, K.; Green, A.; Hüttenrauch, H. Social and Collaborative Aspects of Interaction with a Service Robot. Robot. Auton. Syst. 2003, 42, 223–234. [Google Scholar] [CrossRef]
- Van Doorn, J.; Mende, M.; Noble, S.M.; Hulland, J.; Ostrom, A.L.; Grewal, D.; Petersen, J.A. Domo Arigato Mr. Roboto: Emergence of Automated Social Presence in Organizational Frontlines and Customers’ Service Experiences. J. Serv. Res. 2017, 20, 43–58. [Google Scholar] [CrossRef] [Green Version]
- Jeong, S.; Logan, D.E.; Goodwin, M.S.; Graca, S.; O’Connell, B.; Goodenough, H.; Anderson, L.; Stenquist, N.; Fitzpatrick, K.; Zisook, M. A Social Robot to Mitigate Stress, Anxiety, and Pain in Hospital Pediatric Care. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, Portland, OR, USA, 2–5 March 2015; pp. 103–104. [Google Scholar]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A Survey of Socially Interactive Robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Salichs, M.A.; Barber, R.; Khamis, A.M.; Malfaz, M.; Gorostiza, J.F.; Pacheco, R.; Rivas, R.; Corrales, A.; Delgado, E.; Garcia, D. Maggie: A Robotic Platform for Human-Robot Social Interaction. In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics, Luoyang, China, 25–28 June 2006; pp. 1–7. [Google Scholar]
- Pandey, A.K.; Gelin, R. A Mass-Produced Sociable Humanoid Robot: Pepper: The First Machine of Its Kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48. [Google Scholar] [CrossRef]
- Belanche, D.; Casaló, L.v.; Flavián, C.; Schepers, J. Service Robot Implementation: A Theoretical Framework and Research Agenda. Serv. Ind. J. 2020, 40, 203–225. [Google Scholar] [CrossRef] [Green Version]
- Gockley, R.; Bruce, A.; Forlizzi, J.; Michalowski, M.; Mundell, A.; Rosenthal, S.; Sellner, B.; Simmons, R.; Snipes, K.; Schultz, A.C. Designing Robots for Long-Term Social Interaction. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1338–1343. [Google Scholar]
- Papadopoulos, I.; Lazzarino, R.; Miah, S.; Weaver, T.; Thomas, B.; Koulouglioti, C. A Systematic Review of the Literature Regarding Socially Assistive Robots in Pre-Tertiary Education. Comput. Educ. 2020, 155, 103924. [Google Scholar] [CrossRef]
- Khan, S.; Germak, C. Reframing HRI Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using UX for HRI. Future Internet 2018, 10, 101. [Google Scholar] [CrossRef] [Green Version]
- Sandoval, E.B.; Brandstatter, J.; Yalcin, U.; Bartneck, C. Robot Likeability and Reciprocity in Human Robot Interaction: Using Ultimatum Game to Determinate Reciprocal Likeable Robot Strategies. Int. J. Soc. Robot. 2021, 13, 851–862. [Google Scholar] [CrossRef]
- Ma, C.; Li, W.; Gravina, R.; Cao, J.; Li, Q.; Fortino, G. Activity Level Assessment Using a Smart Cushion for People with a Sedentary Lifestyle. Sensors 2017, 17, 2269. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, X.; Yu, B.; Lu, Y.; Chen, Y.; Pu, P. HealthSit: Designing Posture-Based Interaction to Promote Exercise during Fitness Breaks. Int. J. Hum. Comput. Interact. 2019, 35, 870–885. [Google Scholar] [CrossRef] [Green Version]
- Borenstein, J.; Everett, H.R.; Feng, L.; Wehe, D. Mobile Robot Positioning: Sensors and Techniques. J. Robot. Syst. 1997, 14, 231–249. [Google Scholar] [CrossRef]
- Dow, S.; MacIntyre, B.; Lee, J.; Oezbek, C.; Bolter, J.D.; Gandy, M. Wizard of Oz Support throughout an Iterative Design Process. IEEE Pervasive Comput. 2005, 4, 18–26. [Google Scholar] [CrossRef]
- Kelley, J.F. An Iterative Design Methodology for User-Friendly Natural Language Office Information Applications. ACM Trans. Inf. Syst. (TOIS) 1984, 2, 26–41. [Google Scholar] [CrossRef]
- Kelley, J.F. An Empirical Methodology for Writing User-Friendly Natural Language Computer Applications. In Proceedings of the SIGCHI conference on Human Factors in Computing Systems, Gaithersburg, MD, USA, 15–17 March 1982; pp. 193–196. [Google Scholar]
- Tencent Meeting. 2021. Available online: https://meeting.tencent.com/ (accessed on 14 November 2021).
- Bradley, M.M.; Lang, P.J. Measuring Emotion: The Self-Assessment Manikin and the Semantic Differential. J. Behav. Ther. Exp. Psychiatry 1994, 25, 49–59. [Google Scholar] [CrossRef]
- Ryan, R.M. Control and Information in the Intrapersonal Sphere: An Extension of Cognitive Evaluation Theory. J. Personal. Soc. Psychol. 1982, 43, 450. [Google Scholar] [CrossRef]
- Kousuan. 2021. Available online: http://kousuan.itubu.com (accessed on 14 November 2021).
- Braun, V.; Clarke, V. Using Thematic Analysis in Psychology. Qual. Res. Psychol. 2006, 3, 77–101. [Google Scholar] [CrossRef] [Green Version]
- Holtzblatt, K.; Beyer, H. Contextual Design: Defining Customer-Centered Systems; Elsevier: Amsterdam, The Netherlands, 1997. [Google Scholar]
- Richard, M.; Christina, M.F.; Deborah, L.S.; Rubio, N.; Kennon, M.S. Intrinsic Motivation and Exercise Adherence. Int. J. Sport Psychol 1997, 28, 335–354. [Google Scholar]
- Thompson, W.F.; Schellenberg, E.G.; Husain, G. Arousal, Mood, and the Mozart Effect. Psychol. Sci. 2001, 12, 248–251. [Google Scholar] [CrossRef]
- Hung, L.; Gregorio, M.; Mann, J.; Wallsworth, C.; Horne, N.; Berndt, A.; Liu, C.; Woldum, E.; Au-Yeung, A.; Chaudhury, H. Exploring the Perceptions of People with Dementia about the Social Robot PARO in a Hospital Setting. Dementia 2021, 20, 485–504. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MacDorman, K.F.; Cowley, S.J. Long-Term Relationships as a Benchmark for Robot Personhood. In Proceedings of the ROMAN 2006—The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 378–383. [Google Scholar]
- Zhang, T.; Kaber, D.B.; Zhu, B.; Swangnetr, M.; Mosaly, P.; Hodge, L. Service Robot Feature Design Effects on User Perceptions and Emotional Responses. Intell. Serv. Robot. 2010, 3, 73–88. [Google Scholar] [CrossRef]
- Danielsson, C.B.; Bodin, L. Difference in Satisfaction with Office Environment among Employees in Different Office Types. J. Archit. Plan. Res. 2009, 26, 241–257. [Google Scholar]
- Lee, I.; Lee, K. The Internet of Things (IoT): Applications, Investments, and Challenges for Enterprises. Bus. Horiz. 2015, 58, 431–440. [Google Scholar] [CrossRef]
- Zagler, W.L.; Panek, P.; Rauhala, M. Ambient Assisted Living Systems-the Conflicts between Technology, Acceptance, Ethics and Privacy. Dagstuhl Semin. Proc. 2008, 7462, 1862–4405. [Google Scholar]
- Rosenthal, S.; Veloso, M.; Dey, A.K. Task Behavior and Interaction Planning for a Mobile Service Robot That Occasionally Requires Help. In Proceedings of the Workshops at the Twenty-Fifth AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 24 August 2011; pp. 14–19. [Google Scholar]
- Liu, P.; Glas, D.F.; Kanda, T.; Ishiguro, H.; Hagita, N. It’s Not Polite to Point Generating Socially-Appropriate Deictic Behaviors towards People. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 3–6 March 2013; pp. 267–274. [Google Scholar]
- Winkle, K.; Caleb-Solly, P.; Turton, A.; Bremner, P. Social Robots for Engagement in Rehabilitative Therapies: Design Implications from a Study with Therapists. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 289–297. [Google Scholar]
- Martelaro, N.; Nneji, V.C.; Ju, W.; Hinds, P. Tell Me More Designing Hri to Encourage More Trust, Disclosure, and Companionship. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 181–188. [Google Scholar]
- Lee, W.-Y.; Jung, M. Ludic-HRI: Designing Playful Experiences with Robots. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 582–584. [Google Scholar]
- Chita-Tegmark, M.; Scheutz, M. Assistive Robots for the Social Management of Health: A Framework for Robot Design and Human–Robot Interaction Research. Int. J. Soc. Robot. 2021, 13, 197–217. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Choi, J. Enhancing User Experience with Conversational Agent for Movie Recommendation: Effects of Self-Disclosure and Reciprocity. Int. J. Hum. Comput. Stud. 2017, 103, 95–105. [Google Scholar] [CrossRef]
- Fogg, B.J.; Nass, C. How Users Reciprocate to Computers: An Experiment That Demonstrates Behavior Change. In CHI’97 Extended Abstracts on Human Factors in Computing Systems; ACM Press: New York, NY, USA, 1997; pp. 331–332. [Google Scholar]
- Palumbo, M.V.; Sikorski, E.A.; Liberty, B.C. Exploring the Cost-Effectiveness of Unit-Based Health Promotion Activities for Nurses. Workplace Health Saf. 2013, 61, 514–520. [Google Scholar] [CrossRef]
- Cambo, S.A.; Avrahami, D.; Lee, M.L. BreakSense: Combining Physiological and Location Sensing to Promote Mobility during Work-Breaks. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 3595–3607. [Google Scholar]
- Brakenridge, C.L.; Fjeldsoe, B.S.; Young, D.C.; Winkler, E.A.H.; Dunstan, D.W.; Straker, L.M.; Healy, G.N. Evaluating the Effectiveness of Organisational-Level Strategies with or without an Activity Tracker to Reduce Office Workers’ Sitting Time: A Cluster-Randomised Trial. Int. J. Behav. Nutr. Phys. Act. 2016, 13, 115. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Pleasure | Arousal | Dominance | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Z, p | Improv. * | Pre | Post | Z, p | Improv. * | Pre | Post | Z, p | Improv. * | |
| RGI | 5.83 | 7.11 | 2.61 | 1.28 | 4.39 | 5.39 | 2.20 | 1.00 | 5.83 | 6.33 | 1.06 | 0.50 |
| 0.31 | 0.21 | 0.009 | 0.37 | 0.36 | 0.39 | 0.028 | 0.40 | 0.44 | 0.43 | 0.288 | 0.44 | |
| HGI | 5.39 | 7.22 | 3.01 | 1.83 | 4.17 | 4.89 | 1.32 | 0.72 | 6.39 | 6.50 | 0.16 | 0.11 |
| 0.33 | 0.39 | 0.003 | 0.44 | 0.39 | 0.43 | 0.186 | 0.54 | 0.47 | 0.41 | 0.877 | 0.46 | |
| Z, p | 1.15 | 1.56 | 0.60 | 0.46 | 1.49 | 0.20 | ||||||
| 0.249 | 0.118 | 0.551 | 0.645 | 0.136 | 0.842 | |||||||
| Conditions | Correction Rate | Completion Time (by Second) | ||||||
|---|---|---|---|---|---|---|---|---|
| Pre | Post | Z, p | Improv. * | Pre | Post | Z, p | Improv. * | |
| RGI | 87% | 92% | 1.16 | 5% | 66.4 | 47.2 | 2.22 | 19.2 |
| 0.03 | 0.03 | 0.248 | 0.04 | 9.91 | 6.26 | 0.026 | 7.86 | |
| HGI | 87% | 85% | 0.51 | 2% | 53.2 | 51.5 | 0.04 | 1.7 |
| 0.02 | 0.02 | .608 | 0.04 | 7.15 | 5.57 | 0.965 | 5.39 | |
| Z, p | 0.11 | 0.94 | 0.52 | 1.49 | ||||
| 0.916 | 0.347 | 0.601 | 0.136 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, X.; Guo, Z.; Huang, A.; Li, Y.; Xu, X.; Zhang, X. Effects of Social Robotics in Promoting Physical Activity in the Shared Workspace. Sustainability 2022, 14, 4006. https://doi.org/10.3390/su14074006
Ren X, Guo Z, Huang A, Li Y, Xu X, Zhang X. Effects of Social Robotics in Promoting Physical Activity in the Shared Workspace. Sustainability. 2022; 14(7):4006. https://doi.org/10.3390/su14074006
Chicago/Turabian StyleRen, Xipei, Zhifan Guo, Aobo Huang, Yuying Li, Xinyi Xu, and Xiaoyu Zhang. 2022. "Effects of Social Robotics in Promoting Physical Activity in the Shared Workspace" Sustainability 14, no. 7: 4006. https://doi.org/10.3390/su14074006
APA StyleRen, X., Guo, Z., Huang, A., Li, Y., Xu, X., & Zhang, X. (2022). Effects of Social Robotics in Promoting Physical Activity in the Shared Workspace. Sustainability, 14(7), 4006. https://doi.org/10.3390/su14074006