
Greenhouse Gas Emissions Performance of Electric and Fossil-Fueled Passenger Vehicles with Uncertainty Estimates Using a Probabilistic Life-Cycle Assessment

Abstract
:1. Introduction
2. Materials and Methods
2.1. Probabilistic LCA (pLCA)
2.2. Model Definition
2.3. Input Distribution Development
2.4. Scenario Definitions
3. Input Distributions
3.1. Overview of Input Distribution Definitions
3.2. Vehicle Manufacturing
3.3. On-Road Driving ICEVs
3.4. Electricity Production and Consumption
3.5. On-Road Driving BEVs
3.6. Infrastructure for Electricity Generation
3.7. Infrastructure for Fossil Fuels
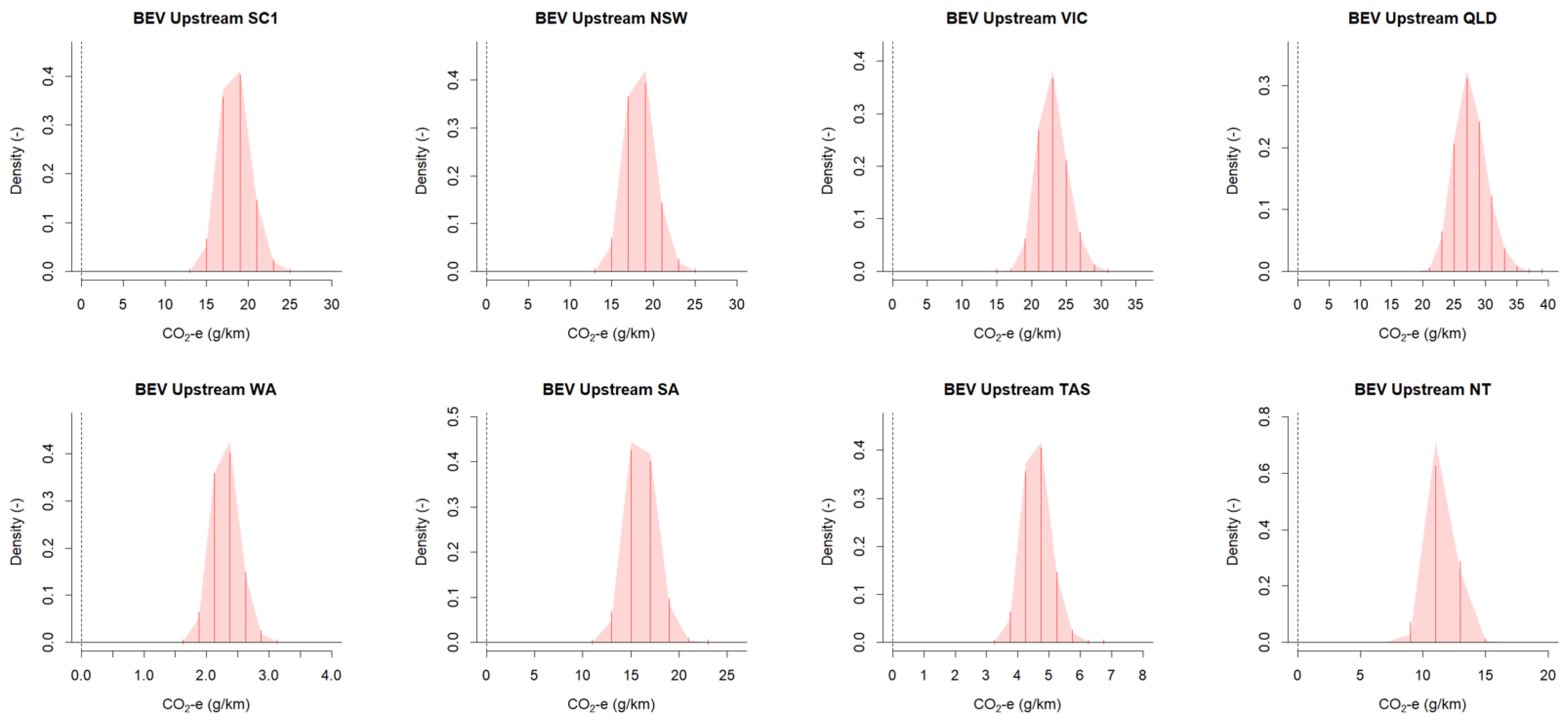
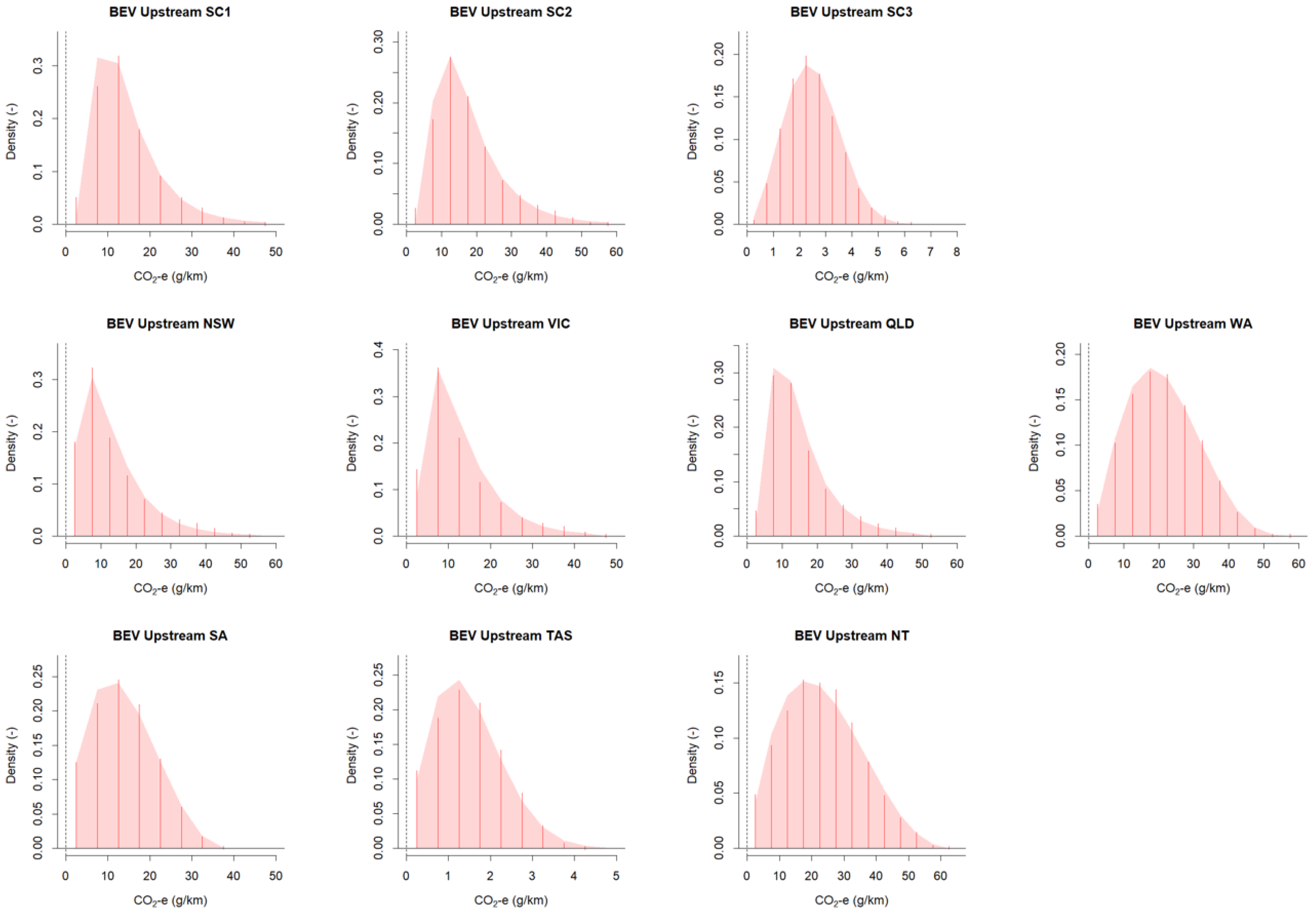
3.8. Upstream Emissions for Fossil Fuels
3.9. Upstream Emissions for Electricity Generation
3.10. Vehicle Recycling and Disposal
4. Results and Discussion
4.1. Probabilistic Technology Assessment
4.2. Sensitivity Analysis
- (a)
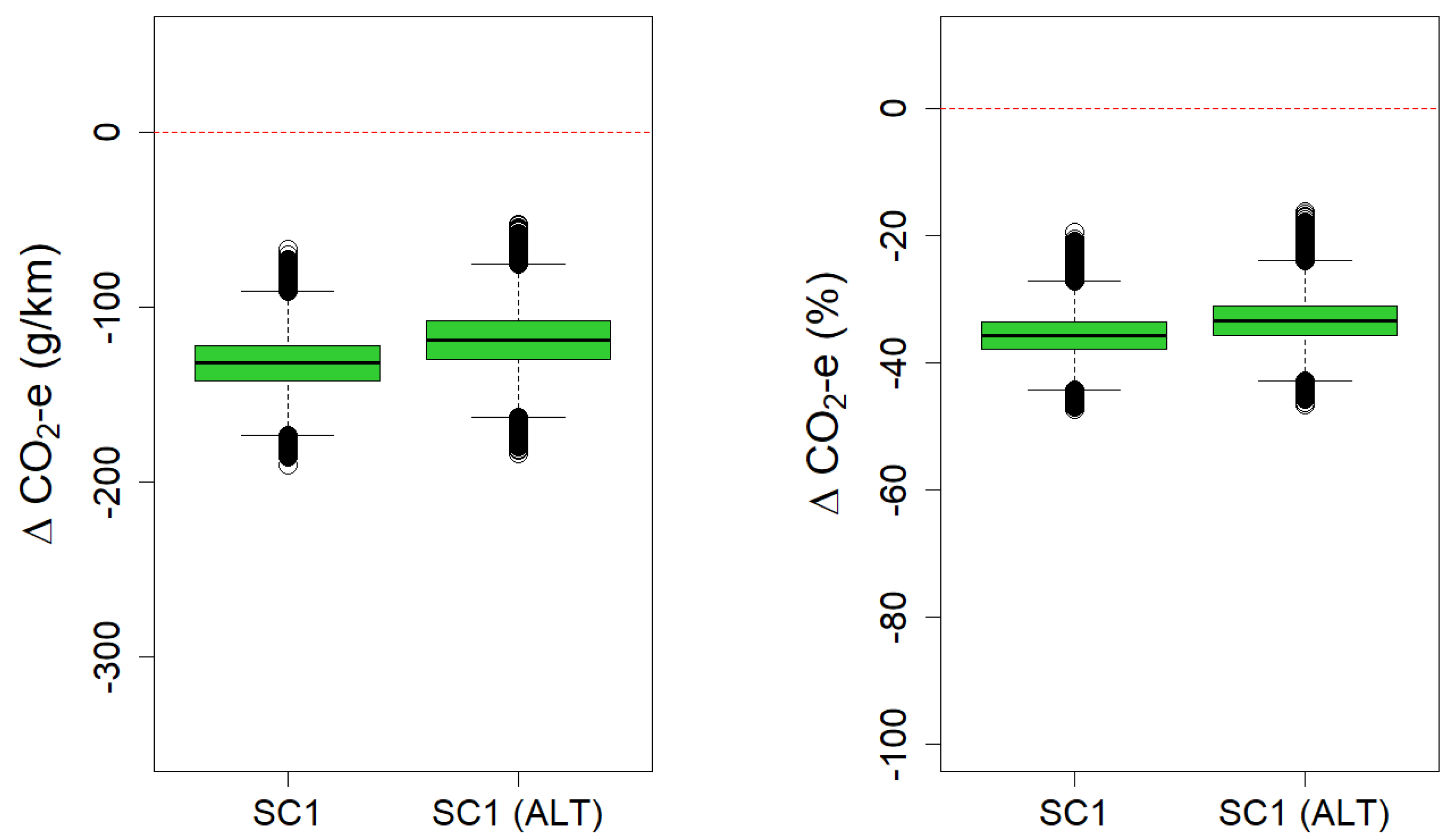
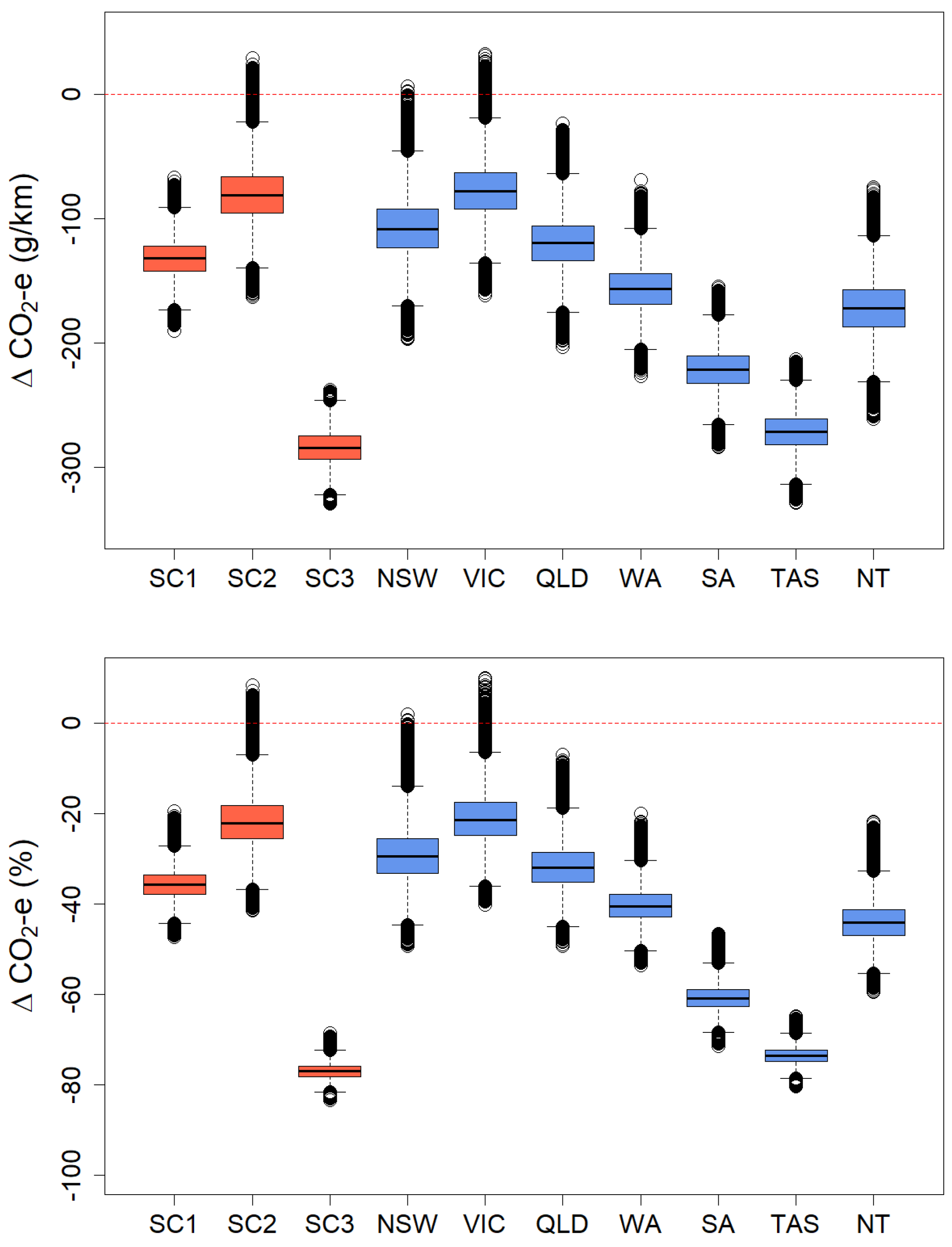
- Using COPERT Australia and the Australian Fleet Model, a non-standard beta distribution (B: 9.89, 16.86) with truncation at 225 and 298 g CO2-e/km was developed for on-road ICEVs (Section 3.3). The alternative parametric distribution was used in a repeat of the probabilistic technology assessment for the current (2018/19) Australian electricity mix (Scenario 1). The results are presented in Appendix C. The mean LCA GHG emission factor for ICEVs is reduced from 369 to 356 g CO2-e/km (3.5%), compared to the probabilistic technology assessment in Section 4.1. The overall predicted effect of electrification (Figure 11) is similar. Section 4.1 predicted that BEVs will reduce GHG emission rates by 36% on average and by between 29% and 41%. Using COPERT Australia and the Australian Fleet Model as an alternative input, it is predicted that BEVs will reduce GHG emission rates by 33% on average and by between 26% and 40%, a similar result. The probability that BEVs exceeds the minimum predicted ICEV LCA GHG emission factor is zero for both simulations, which means that none of the million simulations generated a higher emission rate for BEVs as compared with ICEVs.
- (b)
- Alternative upstream GHG emission factor distributions for Australian BEVs were developed using Scope 3 data from the National Greenhouse Accounts and overseas publications (Section 3.8). The alternative parametric distributions (Table 8) were used in a repeat of the probabilistic technology assessment, including development of alternative lumped emission factor distributions (Appendix B, Table A3). The results are presented in Appendix D. The mean LCA GHG emission factors for BEVs vary by approximately ±15%, compared to the probabilistic technology assessment in Section 4.1. The largest change is observed for NT, where the mean BEV GHG emission factor is reduced by 14% from 218 to 188 g CO2-e/km. For the majority of jurisdictions, this difference is typically approximately ±5% or less. The overall predicted effect of electrification (Figure 11) is remarkably stable as is shown in Figure A2, which suggests that the results from the probabilistic analysis are robust.
4.3. Expansion and Refinement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Distribution Definitions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Range | Parameters | Probability Density Function (PDF) |
|---|---|---|---|
| Uniform—U(x:a,b) | a ≤ x ≤ b | ||
| Triangular—T(x:a,b,c) | a ≤ x ≤ b | ||
| Normal—N(x:m,s) | −∞ ≤ x ≤ +∞ | ||
| Lognormal—L(x:m,s) | 0 ≤ x ≤ +∞ | m: Log-mean, | |
| Weibull—W(x:s,k) | 0 ≤ x ≤ +∞ | ||
| Gamma—G(x:s,k) | 0 ≤ x ≤ +∞ | ||
| Exponential—E(x:s) | 0 ≤ x ≤ +∞ | ||
| Non-Standard Beta—B(x:s,k,a,b) | a ≤ x ≤ b | ||
| Skew t—S(x:m,s,a,d) | −∞ ≤ x ≤ +∞ | where is the cumulative distribution function. * | |
| Dirac Delta—D(x:m) | −∞ ≤ x ≤ +∞ Practically x = m |
Appendix B. Lumped GHG Distributions
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Non-standard beta, B (8.91, 29.73) | 194.00 | 153.00–257.00 |
| Scenario 2 (Marginal Electricity) | Skewed t, S (210.66, 25.20, 1.96, 19870.21) | 229.00 | 177.00–306.00 |
| Scenario 3 (More Renewable Electricity) | Non-standard beta, B (5.32, 24.15) | 29.00 | 20.00–46.00 |
| NSW | Skewed t, S (182.18, 25.83, 1.91, 19344.81) | 200.00 | 148.00–281.00 |
| VIC | Skewed t, S (209.99, 23.74, 2.07, 379.39) | 227.00 | 184.00–300.00 |
| QLD | Lognormal, L (5.27, 0.08) | 196.00 | 156.00–263.00 |
| WA | Non-standard beta, B (7.26, 16.91) | 177.00 | 136.00–251.00 |
| SA | Non-standard beta, B (7.26, 16.91) | 86.00 | 62.00–127.00 |
| TAS | Non-standard beta, B (6.53, 11.81) | 38.00 | 31.00–49.00 |
| NT | Non-standard beta, B (5.83, 12.95) | 163.00 | 122.00–238.00 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Non-standard beta, B (5.30, 9.63) | 195.00 | 165.00–242.00 |
| Scenario 2 (Marginal Electricity) | - | - | - |
| Scenario 3 (More Renewable Electricity) | - | - | - |
| NSW | Non-standard beta, B (9.37, 16.99) | 206.00 | 161.00–265.00 |
| VIC | Non-standard beta, B (5.32, 9.49) | 245.00 | 205.00–297.00 |
| QLD | Non-standard beta, B (5.81, 10.54) | 237.00 | 198.00–288.00 |
| WA | Non-standard beta, B (4.63, 8.22) | 164.00 | 137.00–201.00 |
| SA | Non-standard beta, B (8.32, 14.88) | 90.00 | 75.00–109.00 |
| TAS | Non-standard beta, B (7.26, 12.69) | 45.00 | 37.00–55.00 |
| NT | Non-standard beta, B (4.59, 8.11) | 130.00 | 111.00–157.00 |
Appendix C. Sensitivity Analysis Using Alternative On-Road ICEV Distribution
| Scenario/ Jurisdiction | LCA GHG ICEV g CO2-e/km (95% CI) | LCA GHG BEV g CO2-e/km (95% CI) | Relative Difference % (95% CI) | Probability BEV > ICEV |
|---|---|---|---|---|
| Scenario 1 (Australia Current) | 356 (332 to 381) | 237 (221 to 255) | −33 (−40 to −26) | 0.0 * |
Appendix D. Sensitivity Analysis Using Alternative Upstream BEV GHG Distributions
| Scenario/ Jurisdiction | LCA GHG ICEV g CO2-e/km (95% CI) | LCA GHG BEV g CO2-e/km (95% CI) | Relative Difference % (95% CI) | Probability BEV > ICEV |
|---|---|---|---|---|
| Scenario 1 (Australia Current) | 369 (349 to 390) | 250 (231 to 270) | −32 (−25 to −39) | 0.0 * |
| Scenario 2 (Marginal Electricity) | - | - | - | - |
| Scenario 3 (More Renewable Electricity) | - | - | - | - |
| NSW | 368 (344 to 393) | 258 (238 to 280) | −30 (−37 to −22) | 0.0 * |
| VIC | 364 (340 to 389) | 298 (276 to 323) | −18 (−26 to −9) | 6.1 × 10-5 * |
| QLD | 375 (351 to 400) | 290 (268 to 314) | −23 (−30 to −14) | 0.0 * |
| WA | 387 (363 to 412) | 220 (202 to 240) | −43 (−49 to −37) | 0.0 * |
| SA | 364 (340 to 389) | 147 (135 to 160) | −60 (−64 to −55) | 0.0 * |
| TAS | 369 (343 to 395) | 104 (93 to 115) | −72 (−75 to −68) | 0.0 * |
| NT | 390 (357 to 423) | 188 (173 to 204) | −52 (−57 to −46) | 0.0 * |
References
- Samaras, C.; Meisterling, K. Life-cycle assessment of greenhouse gas emissions from plug-in hybrid vehicles: Implications for policy. Environ. Sci. Technol. 2008, 42, 3170–3176. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garcia, R.; Freire, F. A review of fleet-based life-cycle approaches focusing on energy and environmental impacts of vehicles. Renew. Sustain. Energy Rev. 2017, 79, 935–945. [Google Scholar] [CrossRef]
- Turconi, R.; Boldrin, A.; Astrup, T. Life-cycle assessment (LCA) of electricity generation technologies: Overview, comparability and limitations. Renew. Sustain. Energy Rev. 2013, 28, 555–565. [Google Scholar] [CrossRef] [Green Version]
- Nordelöf, A.; Messagie, M.; Tillman, A.M.; Söderman, M.L.; Van Mierlo, J. Environmental impacts of hybrid, plug-in hybrid, and battery electric vehicles—what can we learn from life-cycle assessment? Int. J. Life Cycle Assess. 2014, 19, 1866–1890. [Google Scholar] [CrossRef] [Green Version]
- Helmers, E.; Dietz, J.; Weiss, M. Sensitivity analysis in the life-cycle assessment of electric vs. combustion engine cars under approximate real-world conditions. Sustainability 2020, 12, 1241. [Google Scholar] [CrossRef] [Green Version]
- Noshadravan, A.; Cheah, L.; Roth, R.; Freire, F.; Dias, L.; Gregory, J. Stochastic comparative assessment of life-cycle greenhouse gas emissions from conventional and electric vehicles. Int. J. Life Cycle Assess. 2015, 20, 854–864. [Google Scholar] [CrossRef] [Green Version]
- Ricardo. Determining the Environmental Impacts of Conventional and Alternatively Fuelled Vehicles through LCA; Final Report for the European Commission, DG Climate Action: Brussels, Belgium, 2020. [Google Scholar]
- Hawkins, T.; Gausen, O.; Strømman, A. Environmental impacts of hybrid and electric vehicles—A review. Int. J. Life Cycle Assess. 2012, 17, 997–1014. [Google Scholar] [CrossRef]
- Wang, M.; Plotkin, S.; Santini, D.; He, J.; Gaines, L.; Patterson, P. Total Energy-Cycle Energy and Emissions Impacts of Hybrid Electric Vehicles; ANL/ES/CP–94277; Argonne National Lab: Lemont, IL, USA, 1997. [Google Scholar]
- Silva, C.; Ross, M.; Farias, T. Evaluation of energy consumption, emissions and cost of plug-in hybrid vehicles. Energy Convers. Manag. 2009, 50, 7, 1635–1643. [Google Scholar] [CrossRef]
- Wang, Z.; Karki, R. Exploiting PHEV to augment power system reliability. IEEE Trans. Smart Grid 2016, 8, 2100–2108. [Google Scholar] [CrossRef]
- McCleese, D.L.; LaPuma, P.T. Using Monte Carlo simulation in Life Cycle Assessment for electric and internal combustion vehicles. Int. J. Life Cycle Assess. 2002, 7, 230–236. [Google Scholar] [CrossRef]
- Nansai, K.; Tohno, S.; Kono, M.; Kasahara, M. Effects of electric vehicles (EV) on environmental loads with consideration of regional differences of electric power generation and charging characteristic of EV users in Japan. Appl. Energy 2002, 71, 111–125. [Google Scholar] [CrossRef]
- Doucette, R.; McCulloch, M. Modeling the CO2 emissions from battery electric vehicles given the power generation mixes of different countries. Energy Policy 2011, 39, 803–811. [Google Scholar] [CrossRef]
- Archsmith, J.; Kendall, A.; Rapson, D. From cradle to junkyard: Assessing the life-cycle greenhouse gas benefits of electric vehicles. Res. Transp. Econ. 2015, 52, 72–90. [Google Scholar] [CrossRef] [Green Version]
- Moro, A.; Helmers, E. A new hybrid method for reducing the gap between WTW and LCA in the carbon footprint assessment of electric vehicles. Int. J. Life Cycle Assess. 2017, 22, 4–14. [Google Scholar] [CrossRef] [Green Version]
- Bandivadekar, A.; Bodek, K.; Cheah, L.; Evans, C.; Groode, T.; Heywood, J.; Kasseris, E.; Kromer, M.; Weiss, M. On the Road in 2035: Reducing Transportation’s Petroleum Consumption and GHG Emissions; MIT Report No LFEE 2008-05 RP; Massachusetts Institute of Technology: Boston, MA, USA, 2008. [Google Scholar]
- Baptista, P.; Silva, C.; Farias, T.; Gonçalves, G. Full life cycle analysis of market penetration of electricity based vehicles. World Electr. Veh. J. 2009, 3, 505–510. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.; Balthasar, F.; Tait, N.; Riera-Palou, X.; Harrison, A. A new comparison between the life cycle greenhouse gas emissions of battery electric vehicles and internal combustion vehicles. Energy Policy 2012, 44, 160–173. [Google Scholar] [CrossRef]
- Bauer, C.; Hofer, J.; Althaus, H.-J.; Del Duce, A.; Simons, A. The environmental performance of current and future passenger vehicles: Life cycle assessment based on a novel scenario analysis framework. Appl. Energy 2015, 157, 871–883. [Google Scholar] [CrossRef]
- Karaaslan, E.; Zhao, Y.; Tatari, O. Comparative life-cycle assessment of sport utility vehicles with different fuel options. Int. J. Life Cycle Assess. 2018, 23, 333–347. [Google Scholar] [CrossRef]
- Andersson, Ö.; Börjesson, P. The greenhouse gas emissions of an electrified vehicle combined with renewable fuels: Life cycle assessment and policy implications. Appl. Energy 2021, 289, 116621. [Google Scholar] [CrossRef]
- EECA. Life Cycle Assessment of Electric Vehicles; Final Report 243139-00, ARUP, 10 November 2015; Energy Efficiency and Conservation Authority: Wellington, New Zealand, 2015. [Google Scholar]
- TER. Real-World CO2 Emissions Performance of the Australian New Passenger Vehicle Fleet 2008–2018—Impacts of Trends in Vehicle/Engine Design. Transport Energy/Emission Research (TER). 2019. Available online: https://www.transport-e-research.com/publications (accessed on 14 September 2019).
- TER. Vehicle CO2 Emissions Legislation in Australia—A Brief History in an International Context, Robin Smit. Transport Energy/Emission Research (TER). 2020. Available online: https://www.transport-e-research.com/publications (accessed on 26 May 2020).
- TER. Non-Exhaust PM Emissions from Battery Electric Vehicles (BEVs)—Does the Argument against Electric Vehicles Stack Up? Transport Energy/Emission Research (TER). 2020. Available online: https://www.transport-e-research.com/publications (accessed on 8 July 2020).
- Smit, R. Does implementation date matter? Euro six vehicle emission standards in Australia—A case study. Air Qual. Clim. Change 2020, 54, 12–14. Available online: https://www.transport-e-research.com/publications (accessed on 15 September 2020).
- Verma, S.; Dwivedi, G.; Verma, P. Life cycle assessment of electric vehicles in comparison to combustion engine vehicles: A review. Mater. Today Proc. 2021, 49, 217–222. [Google Scholar] [CrossRef]
- Cullen, A.C.; Frey, H.C. Probabilistic Techniques in Exposure Assessment; Society of Risk Analysis; Springer Science & Business Media: Berlin, Germany, 1999; ISBN 0306459566. [Google Scholar]
- Efron, B. Bootstrap methods: Another look at the jacknife. Ann. Stat. 1979, 7, 1–26. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Ripley, B. Package ‘boot’. R Package Version 1.3-28. 2021. Available online: https://cran.r-project.org/web/packages/boot/boot.pdf (accessed on 6 January 2022).
- Evans, M.; Hastings, N.; Peacock, B. Statistical Distributions, 2nd ed.; Wiley-Interscience: New York, NY, USA, 1993; ISBN 0471559512. [Google Scholar]
- Wolodzko, T. ExtraDistr: Additional Univariate and Multivariate Distributions. R Package Version 1.9.1. 2020. Available online: https://CRAN.R-project.org/package=extraDistr (accessed on 6 January 2022).
- Azzalini, A.; Capitanio, A. Distributions generated by perturbation of symmetry with emphasis on a multivariate skew t-distribution. J. R. Stat. Soc. Ser. B Stat. Methodol. 2003, 65, 367–389. [Google Scholar] [CrossRef]
- Novomestky, F.; Nadarajah, S. Truncdist: Truncated Random Variables, R Package Version 1.0-2. 2016. Available online: https://CRAN.R-project.org/package=truncdist (accessed on 6 January 2022).
- Venables, W.N.; Ripley, B.D. Modern Applied Statistics with S, 4th ed.; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Azzalini, A. The R Package ‘sn’: The Skew-Normal and Related Distributions Such as the Skew-T and the SUN (Version 2.0.0). 2021. Available online: https://azzalini.stat.unipd.it/SN/ (accessed on 6 January 2022).
- Cramer, H. On the composition of elementary errors. Scand. Actuar. J. 1928, 1, 13–74. [Google Scholar] [CrossRef]
- Valenzuela, M.M.; Espinosa, M.; Virguez, E.A.; Behrentz, E. Uncertainty of greenhouse gas emission models: A case in Columbia’s transport sector. Transp. Res. Procedia 2017, 25, 4606–4622. [Google Scholar] [CrossRef]
- Chart-asa, C.; MacDonald Gibson, J. Health impact assessment of traffic-related air pollution at the urban project scale: Influence of variability and uncertainty. Sci. Total Environ. 2015, 506, 409–421. [Google Scholar] [CrossRef]
- Madachy, R.J. Introduction to Statistics of Simulation, Software Process Dynamics; The Institute of Electrical and Electronics Engineers, Inc.: Piscataway, NJ, USA, 2008. [Google Scholar] [CrossRef]
- DEE. Australian Energy Statistics; Australian Government, Department of Industry, Science, Energy and Resources: Canberra, Australia, 2021.
- Woo, J.; Choi, H.; Ahn, J. Well-to-wheel analysis of greenhouse gas emissions for electric vehicles based on electricity generation mix: A global perspective. Transp. Res. Part D 2017, 51, 340–350. [Google Scholar] [CrossRef]
- Nealer, R.; Reichmuth, D.; Anair, D. Cleaner Cars from Cradle to Grave; Union of Concerned Scientists (UCS): Cambridge, CA, USA, 2015; Available online: https://www.ucsusa.org/resources/cleaner-cars-cradle-grave (accessed on 6 January 2022).
- Hawkins, T.R.; Singh, B.; Majeau-Bettez, G.; Stromman, A.H. Comparative environmental life-cycle assessment of conventional and electric vehicles. J. Ind. Ecol. 2012, 17, 53–64. [Google Scholar] [CrossRef]
- Weiss, M.; Cloos, K.C.; Helmers, E. Energy efficiency trade-offs in small to large electric vehicles. Environ. Sci. Eur. 2020, 32, 46. [Google Scholar]
- Hausfather, Z. Factcheck: How Electric Vehicles Help to Tackle Climate Change. Carbon Brief. 2020. Available online: https://www.carbonbrief.org/factcheck-how-electric-vehicles-help-to-tackle-climate-change (accessed on 7 February 2020).
- Helmers, E.; Marx, P. Electric cars: Technical characteristics and environmental impacts. Environ. Sci. Eur. 2012, 24, 14. [Google Scholar] [CrossRef] [Green Version]
- Chatzikomis, C.I.; Spentzas, K.N.; Mamalis, A.G. Environmental and economic effects of widespread introduction of electric vehicles in Greece. Eur. Transp. Res. Rev. 2014, 6, 365–376. [Google Scholar] [CrossRef]
- Mayyas, A.; Omar, M.; Hayajneh, M.; Mayyas, A.R. Vehicle’s lightweight design vs. electrification from life-cycle assessment perspective. J. Clean. Prod. 2017, 167, 687–701. [Google Scholar] [CrossRef]
- Smit, R.; Ntziachristos, L. COPERT Australia: Developing improved average speed vehicle emission algorithms for the Australian Fleet. In Proceedings of the 19th International Transport and Air Pollution Conference, Thessaloniki, Greece, 26–27 November 2012. [Google Scholar]
- Mellios, G.; Smit, R.; Ntziachristos, L. Evaporative emissions: Developing Australian emission algorithms. In Proceedings of the CASANZ 2013 Conference, Sydney, Australia, 7–11 September 2013. [Google Scholar]
- Smit, R.; Kingston, P.; Wainwright, D.; Tooker, R. A tunnel study to validate motor vehicle emission prediction software in Australia. Atmos. Environ. 2017, 151, 188–199. [Google Scholar] [CrossRef] [Green Version]
- AGEIS. Australian Greenhouse Emissions Information System. Available online: https://ageis.climatechange.gov.au/ (accessed on 22 August 2020).
- ABS. Survey of Motor Vehicle Use. 9210.0.55.001 and 9208.0.DO.001, Australian Bureau of Statistics. 2019. Available online: www.abs.gov.au (accessed on 21 August 2021).
- DISER. Australian Petroleum Statistics; Issue 269, December 2019; Department of Industry, Science, Energy and Resources: Canberra, Australia, 2019. [Google Scholar]
- AG. National Greenhouse Accounts Factors, Australian Government, Department of the Environment and Energy. 2021. Available online: https://www.industry.gov.au/sites/default/files/August%202021/document/national-greenhouse-accounts-factors-2021.pdf (accessed on 21 August 2021).
- CER. Electricity Sector Emissions and Generation Data 2018–19, Clean Energy Regulator (CER). 2020. Available online: http://www.cleanenergyregulator.gov.au/NGER/National%20greenhouse%20and%20energy%20reporting%20data/electricity-sector-emissions-and-generation-data/electricity-sector-emissions-and-generation-data-2018-19 (accessed on 21 August 2021).
- Bossel, U. Does a hydrogen economy make sense? Proc. IEEE 2006, 94, 1826–1837. [Google Scholar] [CrossRef]
- Bruckner, T.; Bashmakov, I.A.; Mulugetta, Y.; Chum, H.; De la Vega Navarro, A.; Edmonds, J.; Faaij, A.; Fungtammasan, B.; Garg, A.; Hertwich, E.; et al. Energy Systems. In Climate Change 2014: Mitigation of Climate Change. Contribution of Working Group III to the 5th Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2014. [Google Scholar]
- Smit, R.; Whitehead, J.; Washington, S. Where are we heading with electric vehicles? Air Qual. Clim. Change 2018, 52, 18–27. Available online: https://www.transport-e-research.com/publications (accessed on 6 January 2022).
- ANL. Well-To-Wheels Analysis of Energy Use and Greenhouse Gas Emissions of Plug-in Hybrid Electric Vehicles; Argonne National Laboratory (ANL): Lemont, IL, USA, 2010. [Google Scholar]
- Kim, H.C.; Wallington, T.J. Life-cycle assessment of vehicle light weighting: A physics-based model to estimate use-phase fuel consumption of electrified vehicles. Environ. Sci. Technol. 2016, 50, 11226–11233. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Wu, Y.; Zhou, B.; Wang, R.; Ke, W.; Zhang, S.; Hao, J. Real-world performance of battery electric buses and their life-cycle benefits with respect to energy consumption and carbon dioxide emissions. Energy 2016, 96, 603–613. [Google Scholar] [CrossRef]
- Williams, B.; Martin, E.; Lipman, T.; Kammen, D. Plug-in-hybrid vehicle use, energy consumption, and greenhouse emissions: An analysis of household vehicle placements in Northern California. Energies 2011, 4, 435–457. [Google Scholar] [CrossRef] [Green Version]
- Apostolaki-Iosifidou, E.; Codani, P.; Kempton, W. Measurement of power loss during electric vehicle charging and discharging. Energy 2017, 127, 730–742. [Google Scholar] [CrossRef]
- Tessum, C.W.; Hill, J.D.; Marshall, D. Life-cycle air quality impacts of conventional and alternative light-duty transportation in the United States. Proc. Natl. Acad. Sci. USA 2014, 111, 18490–18495. [Google Scholar] [CrossRef] [Green Version]
- Luk, J.M.; Saville, B.A.; MacLean, H.L. Life-cycle air emissions impacts and ownership costs of light-duty vehicles using natural gas as a primary energy source. Environ. Sci. Technol. 2015, 49, 5151–5160. [Google Scholar] [CrossRef] [PubMed]
- La Picirelli de Souza, L.; Lora, E.E.S.; Palacio, J.C.E.; Rocha, M.H.; Reno, M.L.G.; Venturini, O.J. Comparative environmental life-cycle assessment of conventional vehicles with different fuel options, plug-in hybrid and electric vehicles for a sustainable transportation system in Brazil. J. Clean. Prod. 2018, 203, 444–468. [Google Scholar] [CrossRef]
- Guardian. Ross Garnaut: Three Policies Will Set Australia on a Path to 100% Renewable Energy. The Guardian. 2019. Available online: https://www.theguardian.com/australia-news/2019/nov/06/ross-garnaut-three-policies-will-set-australia-on-a-path-to-100-renewable-energy (accessed on 6 November 2019).


| Scenario, Jurisdictions | Coal | Gas | Oil | Nuclear | Hydro | Wind | Biomass | Solar |
|---|---|---|---|---|---|---|---|---|
| Australia Current (SC1) | 58.4% | 20.0% | 1.9% | 0.0% | 6.0% | 6.7% | 1.3% | 5.6% |
| Australia Marginal Electricity (SC2) | 73.0% | 24.0% | 3.0% | 0.0% | 0.0% | 0.0% | 0.0% | 0.0% |
| Australia More Renewable (SC3) | 5.0% | 5.0% | 0.0% | 0.0% | 30.0% | 25.0% | 5.0% | 30.0% |
| New South Wales (NSW) Current | 80.7% | 3.3% | 0.5% | 0.0% | 3.0% | 5.2% | 1.6% | 5.7% |
| Victoria (VIC) Current | 70.8% | 6.8% | 0.4% | 0.0% | 5.6% | 10.0% | 1.5% | 4.9% |
| Queensland (QLD) Current | 73.8% | 14.1% | 1.4% | 0.0% | 1.5% | 0.6% | 1.9% | 6.8% |
| Western Australia (WA) Current | 23.8% | 61.5% | 5.8% | 0.0% | 0.5% | 4.4% | 0.3% | 3.7% |
| South Australia (SA) Current | 0.0% | 48.5% | 1.1% | 0.0% | 0.1% | 38.2% | 0.6% | 11.5% |
| Tasmania (TAS) Current | 0.0% | 5.3% | 0.2% | 0.0% | 83.2% | 9.7% | 0.2% | 1.4% |
| Northern Territory (NT) Current | 0.0% | 78.6% | 17.8% | 0.0% | 0.0% | 0.0% | 0.2% | 3.4% |
| Life-Cycle Aspect * | Vehicle Technology | LCA Model Input Variable | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|---|---|
| P | ICEV | evehicle,ICEV | Triangular, T (40.38, 44.98, 58.61) | 45.00 | 40.00–59.00 |
| P | BEV | evehicle,BEV | Non-standard beta, B (7.30, 8.73) | 59.00 | 39.00–83.00 |
| I | ICEV | einfra,ICEV | Uniform, U (0.20, 2.50) | 1.30 | 0.20–2.50 |
| I | BEV | einfra,BEV | Non-standard beta, B (5.81, 10.44) ** (a) | 5.07 | 0.74–10.76 |
| U | ICEV | eupstream,ICEV | Uniform, U (35.90, 72.00) | 51.40 | 35.90–72.00 |
| U | BEV | eupstream,BEV | Lognormal, L (2.53, 0.53) ** (b) | 14.18 | 1.00–49.00 |
| O | ICEV | eroad,ICEV | Normal, N (265, 3) ** (c) | 265.00 | 259.00–272.00 |
| O | BEV | eroad,BEV | Non-standard beta, B (5.81, 10.44) ** (d) | 175.00 | 142.00–215.00 |
| D | ICEV | edisposal,ICEV | Uniform, U (0.10, 2.00) | 0.50 | 0.20–2.50 |
| D | BEV | edisposal,BEV | Uniform, U (0.10, 2.00) | 0.50 | 0.20–2.50 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Normal, N (265, 3) | 265 | 256–275 |
| Scenario 2 (Marginal Electricity) | Normal, N (265, 3) | 265 | 256–275 |
| Scenario 3 (More Renewable Electricity) | Normal, N (265, 3) | 265 | 256–275 |
| NSW | Normal, N (264, 7) | 264 | 242–286 |
| VIC | Normal, N (260, 7) | 260 | 240–279 |
| QLD | Normal, N (271, 7) | 271 | 249–293 |
| SA | Normal, N (260, 7) | 260 | 241–280 |
| WA | Normal, N (283, 7) | 283 | 262–303 |
| TAS | Normal, N (265, 8) | 265 | 240–289 |
| NT | Normal, N (286, 13) | 286 | 247–326 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Biomass | Lognormal, L (4.27, 0.67) | 89.00 | 27.00–295.00 |
| Coal | Non-standard beta, B (7.69, 17.85) | 1023.00 | 913.00–1201.00 |
| Gas | Lognormal, L (6.30, 0.04) | 545.00 | 467.00–635.00 |
| Hydro | Normal, N (0.23, 0.12) | 0.23 | 0.00–0.80 |
| Oil | Triangular, T (638, 1430, 1824) | 1430.00 | 638.00–1824.00 |
| Solar | Gamma, G (8.23, 12.42) | 0.66 | 0.14–1.85 |
| Wind | Lognormal, L (−0.69, 0.24) | 0.52 | 0.23–1.25 |
| Scenario 2 | Skewed t, S (882.01, 27.39, 1.33, 385.26) | 900.00 | 826.00–983.00 |
| Scenario 3 | Skewed t, S (78.66, 4.52, 2.87, 27.08) | 82.00 | 74.00–96.00 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Non-standard beta, B (6.16, 12.20) | 175 | 144–219 |
| Scenario 2 (Marginal Electricity) | Non-standard beta, B (5.86, 10.53) | 207 | 170–258 |
| Scenario 3 (More Renewable Electricity) | Lognormal, L (2.94, 0.07) | 19 | 14–25 |
| NSW | Non-standard beta, B (8.43, 17.03) | 182 | 142–230 |
| VIC | Non-standard beta, B (10.88, 24.20) | 221 | 172–284 |
| QLD | Non-standard beta, B (8.61, 16.72) | 184 | 144–232 |
| SA | Non-standard beta, B (9.70, 20.15) | 69 | 53–90 |
| WA | Non-standard beta, B (8.63, 17.20) | 154 | 121–204 |
| TAS | Non-standard beta, B (8.80, 19.70) | 37 | 29–48 |
| NT | Non-standard beta, B (8.29, 16.14) | 131 | 103–172 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Biomass | Uniform, U (0.04, 2.00) | 0.45 | 0.04–2.00 |
| Coal | Uniform, U (0.8, 46.0) | 8.00 | 0.80–46.00 |
| Gas | Triangular, T (0.60, 1.85, 3.10) | 1.85 | 0.60–3.10 |
| Hydro | Uniform, U (3.10, 20.00) | 7.40 | 3.10–20.00 |
| Oil | Triangular, T (1.00, 2.20, 3.00) | 2.20 | 1.00–3.00 |
| Solar | Exponential, E (0.015) | 67.94 | 20.00–190.00 |
| Wind | Uniform, U (3.00, 41.00) | 18.93 | 3.00–41.00 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Non-standard beta, B (2.26, 3.00) | 5.07 | 0.74–10.76 |
| Scenario 2 (Marginal Electricity) | Normal, N (4.35, 2.38) | 4.35 | 0.21–9.77 |
| Scenario 3 (More Renewable Electricity) | Lognormal, L (1.99, 0.41) | 7.93 | 2.00–19.72 |
| NSW | Non-standard beta, B (1.97, 2.77) | 6.07 | 0.66–13.60 |
| VIC | Non-standard beta, B (2.33, 3.32) | 5.73 | 0.65–12.92 |
| QLD | Non-standard beta, B (1.95, 2.73) | 5.66 | 0.61–12.66 |
| WA | Non-standard beta, B (3.05, 4.41) | 2.61 | 0.52–5.59 |
| SA | Non-standard beta, B (2.70, 5.98) | 4.35 | 1.00–10.47 |
| TAS | Non-standard beta, B (2.31, 2.88) | 3.18 | 0.83–6.11 |
| NT | Gamma, G (8.44, 7.95) | 1.06 | 0.38–2.39 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Non-standard beta, B (14.19, 53.81) | 18.42 | 12.80–26.00 |
| Scenario 2 (Marginal Electricity) | - | - | - |
| Scenario 3 (More Renewable Electricity) | - | - | - |
| NSW | Lognormal, L (2.91, 0.09) | 18.39 | 13.00–26.00 |
| VIC | Skewed t, S (21.04, 2.86, 1.62, 233.11) | 22.99 | 16.00–32.00 |
| QLD | Skewed t, S (25.19, 3.48, 1.67, 102603.40) | 27.57 | 20.00–38.00 |
| WA | Lognormal, L (0.83, 0.09) | 2.30 | 1.70–3.30 |
| SA | Lognormal, L (2.77, 0.09) | 16.10 | 11.75–22.75 |
| TAS | Skewed t, S (4.21, 0.58, 1.64, 2061567.00) | 4.61 | 3.30–6.60 |
| NT | Non-standard beta, B (14.35, 40.67) | 11.48 | 7.60–16.00 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Biomass | Exponential, E (0.028) | 35.30 | 1.00–87.00 |
| Coal | Lognormal, L (3.81, 0.98) | 66.45 | 7.00–230.00 |
| Gas | Normal, N (105.25, 73.29) | 105.25 | 0.56–280.00 |
| Hydro | Dirac, D (0.00) | 0.00 | 0.00–0.00 |
| Oil | Gamma, G (5.02, 0.20) | 25.60 | 11.00–38.00 |
| Solar | Dirac, D (0.00) | 0.00 | 0.00–0.00 |
| Wind | Dirac, D (0.00) | 0.00 | 0.00–0.00 |
| Fuel Type | Distribution | Typical Value | Plausible Min–Max Value |
|---|---|---|---|
| Scenario 1 (Australia 2018/19) | Lognormal, L (2.53, 0.53) | 14.18 | 1.00–49.00 |
| Scenario 2 (Marginal Electricity) | Lognormal, L (2.73, 0.54) | 17.69 | 1.00–58.00 |
| Scenario 3 (More Renewable Electricity) | Weibull, W (2.65, 2.81) | 2.49 | 0.15–6.50 |
| NSW | Skewed t, S (2.50, 11.02, 25.32, 4.46) | 13.04 | 1.50–54.50 |
| VIC | Skewed t, S (3.00, 10.25, 15.23, 5.20) | 12.53 | 1.40–46.00 |
| QLD | Lognormal, L (2.54, 0.57) | 14.94 | 1.70–52.00 |
| WA | Non-standard beta, B (2.53, 4.51) | 21.28 | 1.00–58.00 |
| SA | Non-standard beta, B (2.03, 3.72) | 13.81 | 0.15–40.00 |
| TAS | Weibull, W (1.90, 1.68) | 1.49 | 0.02–4.40 |
| NT | Non-standard beta, B (2.06, 3.61) | 23.34 | 0.70–62.50 |
| Scenario/ Jurisdiction | LCA GHG ICEV g CO2-e/km (95% CI) | LCA GHG BEV g CO2-e/km (95% CI) | Relative Difference % (95% CI) | Probability BEV > ICEV |
|---|---|---|---|---|
| Scenario 1 (Australia Current) | 369 (349 to 390) | 237 (221 to 255) | −36 (−41 to −29) | 0.0 * |
| Scenario 2 (Marginal Electricity) | 369 (349 to 390) | 289 (256 to 328) | −22 (−32 to −10) | 3.6 × 10-4 * |
| Scenario 3 (More Renewable Electricity) | 369 (349 to 390) | 85 (74 to 96) | −77 (−80 to −74) | 0.0 * |
| NSW | 368 (344 to 393) | 261 (227 to 301) | −29 (−39 to −17) | 3.0 × 10-6 * |
| VIC | 364 (340 to 389) | 287 (257 to 325) | −21 (−31 to −9) | 5.4 × 10-4 * |
| QLD | 375 (351 to 400) | 256 (226 to 288) | −32 (−41 to −22) | 0.0 * |
| WA | 387 (363 to 412) | 231 (209 to 255) | −40 (−47 to −33) | 0.0 * |
| SA | 364 (340 to 389) | 143 (126 to 161) | −61 (−66 to −55) | 0.0 * |
| TAS | 369 (343 to 395) | 98 (87 to 109) | −74 (−77 to −70) | 0.0 * |
| NT | 390 (357 to 423) | 218 (194 to 246) | −44 (−52 to −35) | 0.0 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smit, R.; Kennedy, D.W. Greenhouse Gas Emissions Performance of Electric and Fossil-Fueled Passenger Vehicles with Uncertainty Estimates Using a Probabilistic Life-Cycle Assessment. Sustainability 2022, 14, 3444. https://doi.org/10.3390/su14063444
Smit R, Kennedy DW. Greenhouse Gas Emissions Performance of Electric and Fossil-Fueled Passenger Vehicles with Uncertainty Estimates Using a Probabilistic Life-Cycle Assessment. Sustainability. 2022; 14(6):3444. https://doi.org/10.3390/su14063444
Chicago/Turabian StyleSmit, Robin, and Daniel William Kennedy. 2022. "Greenhouse Gas Emissions Performance of Electric and Fossil-Fueled Passenger Vehicles with Uncertainty Estimates Using a Probabilistic Life-Cycle Assessment" Sustainability 14, no. 6: 3444. https://doi.org/10.3390/su14063444
APA StyleSmit, R., & Kennedy, D. W. (2022). Greenhouse Gas Emissions Performance of Electric and Fossil-Fueled Passenger Vehicles with Uncertainty Estimates Using a Probabilistic Life-Cycle Assessment. Sustainability, 14(6), 3444. https://doi.org/10.3390/su14063444