
Decoupling Characteristics and Torque Analytical Model of Sharing-Suspension-Windings Bearingless Switched Reluctance Motor Considering Flux-Linkage Saturation



Abstract
:1. Introduction
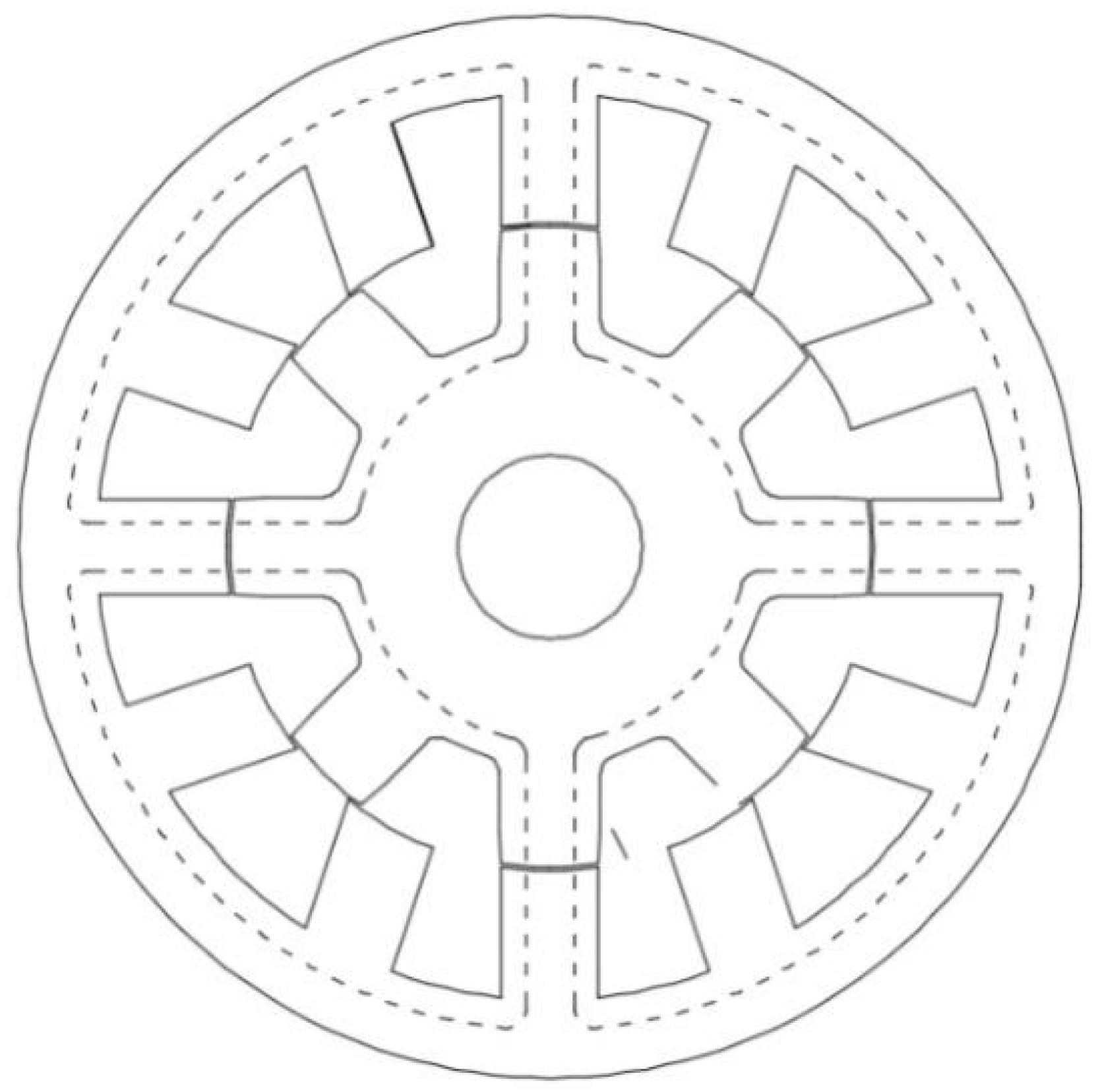
2. Sharing Suspension Winding Bearingless Switched Reluctance Motor
3. Finite Element Simulation Analysis of the Prototype
3.1. Motor Torque and Flux-Linkage Characteristics
3.2. Motor Radial Suspension Force Characteristic
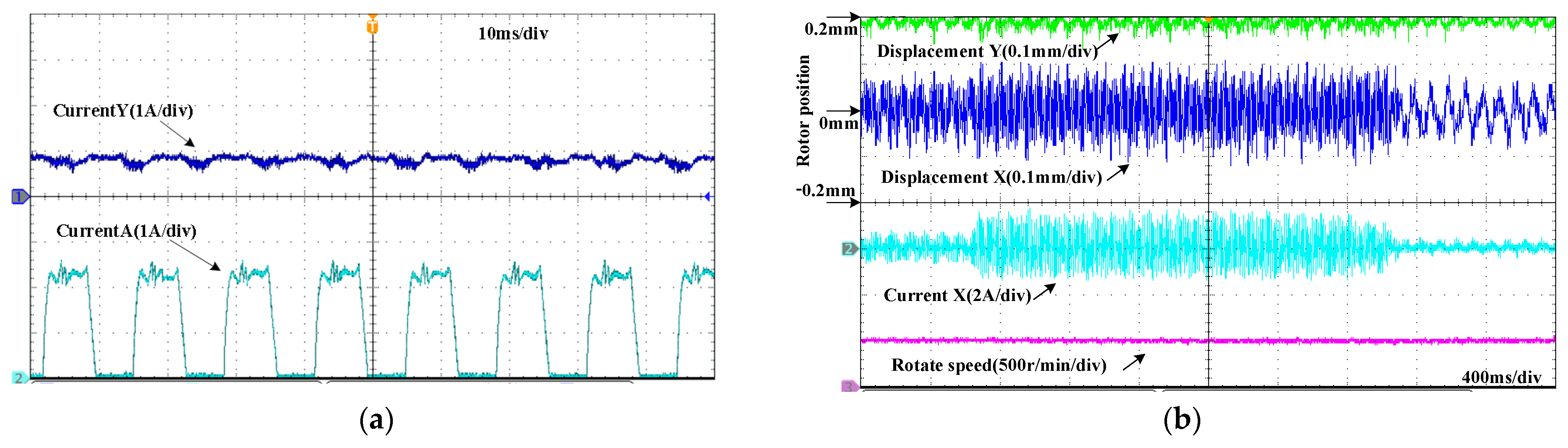
4. Experiments on Decoupling Characteristics of Motors
5. Calculation of Saturation Flux-Linkage
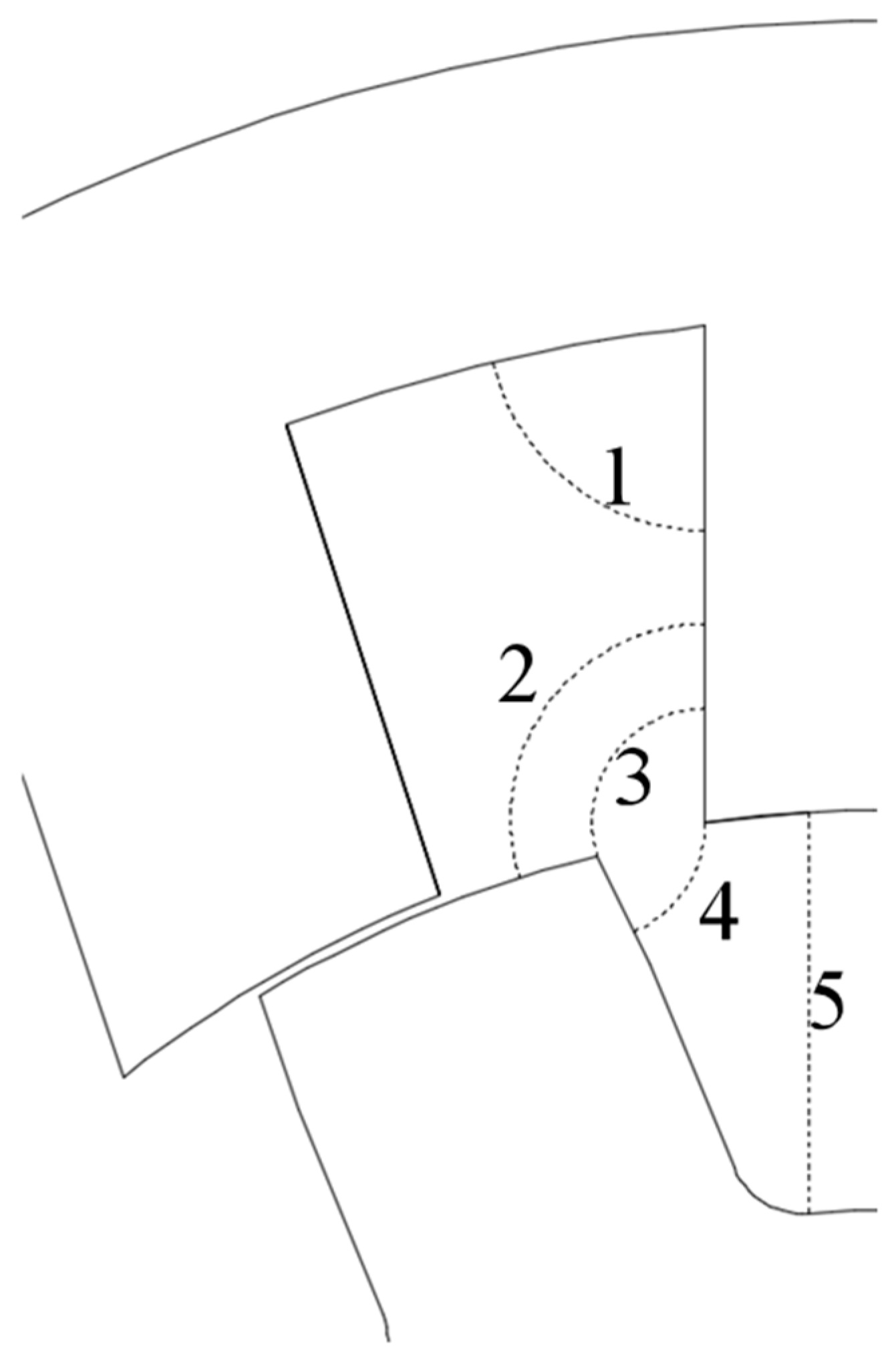
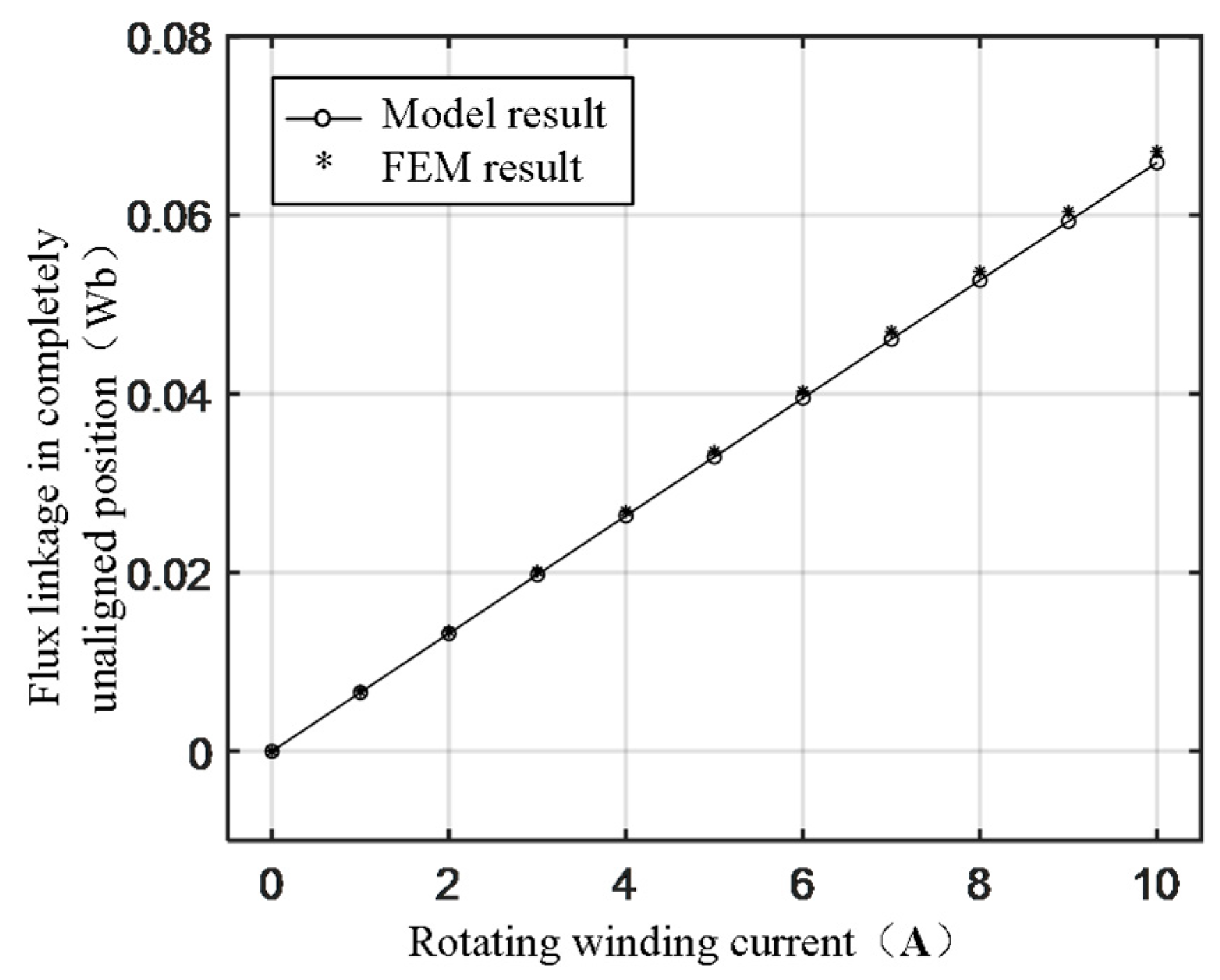
5.1. Flux-linkage at Complete Unalignment of Stator and Rotor
5.2. Flux-Linkage at Complete Alignment of Stator and Rotor
5.3. Electromagnetic Torque of Motor
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| La | core length |
| m | phase number |
| Ds, Da | outer diameter of stator and rotor |
| Dsi | inner diameter of stator |
| Nph | winding turns |
| τr | rotor pole pitch |
| ω | motor angular velocity |
| gi | second air gap (distance from stator pole to rotor slot) |
| hcs, hcr | height of stator yoke and rotor yoke |
| bps, bpr | width of stator pole and rotor pole |
| lFe | magnetic core effective length |
| h | rotor length |
| n | rotor speed |
| μ0 | vacuum permeability |
References
- Ye, X.; Wang, Z. Levitation performances analysis of a novel bearingless switched reluctance motor. IEEE Trans. Appl. Supercond. 2021, 31, 5203004. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, X.; Deng, Z.; Li, K. Modeling and characteristic investigation of axial reluctance force for bearingless switched reluctance motor. IEEE Trans. Ind. Appl. 2021, 57, 5215–5226. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, X.; Deng, Z. Modeling and analysis of radial levitation and axial reluctance force for four degree of freedom bearingless switched reluctance motor. IEEE Trans. Ind. Electron. 2021, 68, 11895–11906. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, J.; Zhu, W. Suspension performance analysis on the novel hybrid stator type bearingless switched reluctance motor. IEEE Trans. Magn. 2021, 57, 8203604. [Google Scholar] [CrossRef]
- Suna, C.; Zhuang, P.; Li, J.; Li, J. Design and analysis of a 16/6 bearingless switched reluctance motor with segment hybrid rotor teeth. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 939–946. [Google Scholar] [CrossRef]
- Zhou, Y.; Jiang, J.; Sun, Y.; Zhu, Z. A dual-phase-conducted type bearingless switched reluctance flywheel motor with hybrid outer rotor. Electron. Lett. 2021, 57, 354–356. [Google Scholar] [CrossRef]
- Sun, C.; Li, J.; Ding, H.; Yang, H.; Han, S.; Han, N. Characteristic analysis of a new double stator bearingless switched reluctance motor. IEEE Access 2021, 9, 38626–38635. [Google Scholar] [CrossRef]
- Gaafar, M.A.; Abdelmaksoud, A.; Orabi, M.; Chen, H.; Dardeer, M. Performance investigation of switched reluctance motor driven by Quasi-Z-Source integrated multiport converter with different switching algorithms. Sustainability 2021, 13, 9517. [Google Scholar] [CrossRef]
- Sahinkaya, M.N.; Abulrub, A.-H.G.; Keogh, P.S.; Burrows, C.R. Multiple Sliding and Rolling Contact Dynamics for a Flexible Rotor/Magnetic Bearing System. IEEE/ASME Trans. Mechatron. 2007, 12, 179–189. [Google Scholar] [CrossRef]
- Hao, Z.; Yu, Q.; Cao, X.; Deng, X.; Shen, X. An improved direct torque control for a single-winding bearingless switched reluctance motor. IEEE Trans. Energy Convers. 2020, 35, 1381–1393. [Google Scholar] [CrossRef]
- Turk, N.; Bulić, N.; Gruber, W. Nonlinear control of a bearingless flux-switching slice motor with combined winding system. IEEE/ASME Trans. Mechatron. 2020, 25, 152–163. [Google Scholar] [CrossRef]
- Schuck, M.; Steinert, D.; Kolar, J.W. Active radial magnetic bearing for an ultra-high speed motor. In Proceedings of the 18th European Conference on Power Electronics and Applications, Karlsruhe, Germany, 5–9 September 2016. [Google Scholar]
- Zhu, Z.; Zhu, J.; Zhu, H.; Jiang, Y.; Cheng, M. A novel axial split phase bearingless switched reluctance machine for On-Board flywheel battery. IEEE Trans. Veh. Technol. 2021, 70, 3175–3186. [Google Scholar] [CrossRef]
- Hao, Y.; Wang, X.; Cui, R.; Fang, X.; Zhang, W.; Li, Y.; Cheng, D. Torque Analytical Model of Switched Reluctance Motor Considering Magnetic Saturation. IET Electr. Power Appl. 2020, 14, 1148–1153. [Google Scholar] [CrossRef]
- Takemoto, M.; Chiba, A.; Akagi, H.; Fukao, T. Radial force and torque of a bearingless switched reluctance motor operating in a region of magnetic saturation. IEEE Trans. Ind. Appl. 2004, 40, 103–112. [Google Scholar] [CrossRef]
- Rao, P.N.; Kumar, N.M.; Padmanaban, S.; Subathra, M.S.P.; Chand, A.A. A novel sensorless approach for speed and displacement control of bearingless switched reluctance motor. Appl. Sci. 2020, 10, 4070. [Google Scholar]
- Zhu, T.; Cao, X.; Yu, Q.; Deng, Z.; Hao, Z. Direct torque control with phase commutation optimization for single-winding bearingless switched reluctance motor. IEEE Trans. Power Electron. 2022, 37, 13238–14249. [Google Scholar] [CrossRef]
- Huang, Y.; Huang, F.; Yuan, Y.; Yang, F.; Xie, K. Design and analysis of a novel bearingless segmented switched reluctance motor. IEEE Access 2019, 7, 94342–94349. [Google Scholar] [CrossRef]
- Ahmeda, F.; Kalitab, K. Controllability of radial displacement in bearingless switched reluctance motor using bridge configured winding. Int. J. Appl. Electromagn. Mech. 2020, 63, 133–152. [Google Scholar] [CrossRef]
- Takemoto, M.; Yoshida, K.; Itasaka, N. Synchronous reluctance type bearingless motors with multi-flux barriers. In Proceedings of the 4th Power Conversion Conference (PCC-Nagoya 2007), Nagoya, Japan, 2–5 April 2007; pp. 1–3. [Google Scholar]
- Takemoto, M.; Iwasaki, S.; Miyazaki, H.; Chiba, A.; Fukao, T. Experimental Evaluation of Magnetic Suspension Characteristics in a 5-axis Active Control Type Bearingless Motor without a Thrust Disk for Wide-gap Condition. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 1–6. [Google Scholar]
- Junichi, A.; Ryo, K.; Tomoyasu, T. Reduction of force interference and performance improvement of a consequent-pole bearingless motor. Precis. Eng.-J. Int. Soc. Precis. Eng. Nanotechnol. 2012, 36, 10–18. [Google Scholar]
- Jihad, F.; Masachika, K.; Kyohei, K. Approximation of Radial Force in Highly Saturated Region of Switched Reluctance Motor. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 13–16. [Google Scholar]
- Wang, X. A Sharing Suspension Windings Bearingless Switched Reluctance Motor. CN200910078022.9, 7 August 2009. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=SCPD&dbname=SCPD0809&filename=CN101478274&uniplatform=NZKPT&v=U-RvtJzoVyVUOEvNK5TfDw0bYufnOWSyJd7cIAB18TTlV6hrlIzrEE9JS-JAs0ZJ (accessed on 7 November 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Stator pole/rotor pole | 12/8 |
| Rotating winding | 23 turns |
| Suspension winding | 23 turns |
| Outer diameter of stator | 110 mm |
| Inner diameter of stator | 67 mm |
| Stator yoke high | 8.05 mm |
| Air gap length | 0.3 mm |
| Outer diameter of rotor | 66.4 mm |
| Inner diameter of rotor | 19 mm |
| Rotor yoke high | 13.1 mm |
| Stator pole wide | 10 mm |
| Rotor pole wide | 10 mm |
| Tilt angle of stator pole | 26.57° |
| Axial length of rotor | 62 mm |
| Rotating winding wire diameter | 0.8 mm double wrap |
| Auxiliary winding wire diameter | 0.8 mm single wrap |
| Material | 50TW600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, W.; Hao, J.; Wang, Z.; Hao, Y. Decoupling Characteristics and Torque Analytical Model of Sharing-Suspension-Windings Bearingless Switched Reluctance Motor Considering Flux-Linkage Saturation. Sustainability 2022, 14, 16633. https://doi.org/10.3390/su142416633
Hao W, Hao J, Wang Z, Hao Y. Decoupling Characteristics and Torque Analytical Model of Sharing-Suspension-Windings Bearingless Switched Reluctance Motor Considering Flux-Linkage Saturation. Sustainability. 2022; 14(24):16633. https://doi.org/10.3390/su142416633
Chicago/Turabian StyleHao, Wenmei, Jie Hao, Zhifu Wang, and Yi Hao. 2022. "Decoupling Characteristics and Torque Analytical Model of Sharing-Suspension-Windings Bearingless Switched Reluctance Motor Considering Flux-Linkage Saturation" Sustainability 14, no. 24: 16633. https://doi.org/10.3390/su142416633
APA StyleHao, W., Hao, J., Wang, Z., & Hao, Y. (2022). Decoupling Characteristics and Torque Analytical Model of Sharing-Suspension-Windings Bearingless Switched Reluctance Motor Considering Flux-Linkage Saturation. Sustainability, 14(24), 16633. https://doi.org/10.3390/su142416633