




Optimization Method of Combined Multi-Mode Bus Scheduling under Unbalanced Conditions



Abstract
1. Introduction
2. Selection of Fast Bus Stops at Large Stations
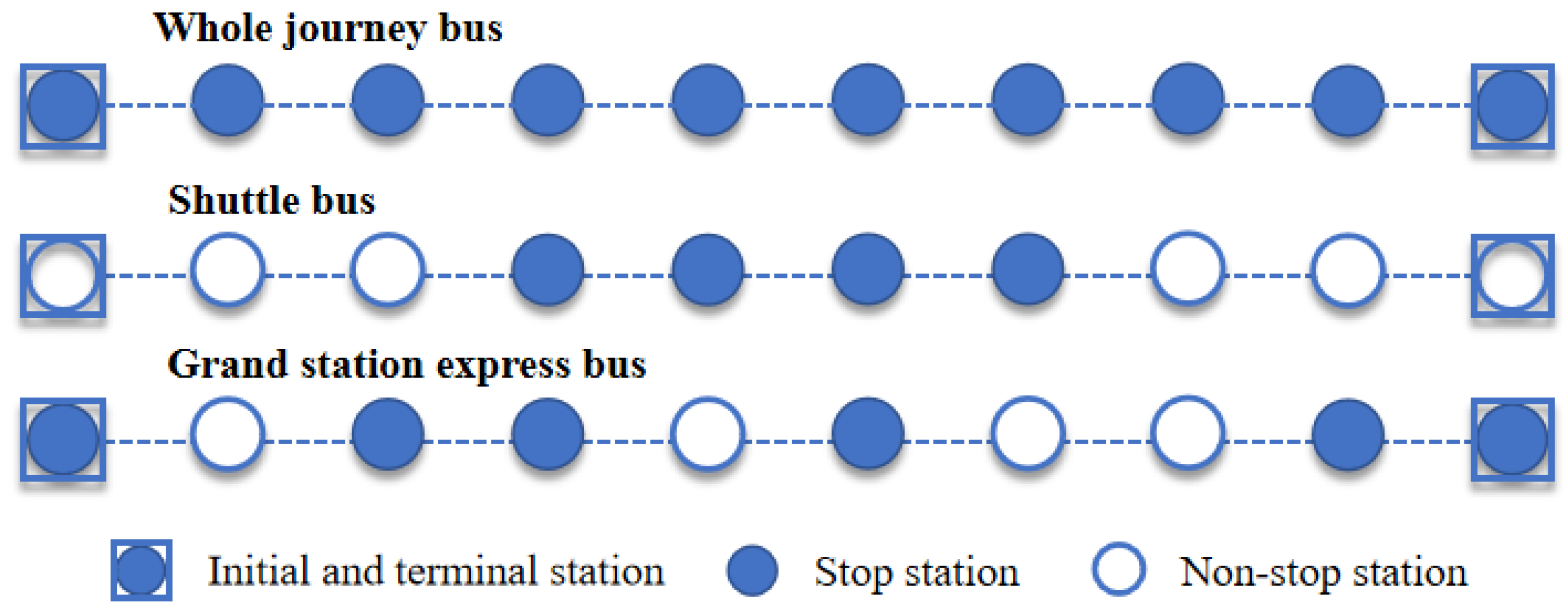
2.1. Type of Bus Scheduling
2.2. Calculation Model of Site Relevance
2.3. Optimization of Line Stops
3. Bus Scheduling Optimization Model under Unbalanced Conditions
3.1. Model Assumptions and Establishment Steps
- The arrival time of passengers at each stop during the study period obeys a uniform distribution.
- Passengers embark on the first bus at the bus stop within the travel interval, and they do not wait for a second bus to come along.
- There is no transfer between the whole-journey bus and the grand station express bus.
- All vehicles operating on the same route are of the same type, rated passenger capacity and maximum passenger capacity, and these values are fixed.
- Each line’s operation is independent and not affected by neighboring lines.
- Bus vehicles move in strict accordance with the schedule and are on time.
- The speed of bus vehicles between stations is constant regardless of road operating hours and weather conditions, ignoring traffic jams or other unexpected circumstances encountered, and stations can be reached on time.
3.2. Two-Way Bus Scheduling Optimization Model for Peak Passenger Flow
3.2.1. Bus Passenger Travel Costs
- (1)
- Passenger waiting cost .
- (2)
- Passenger travel cost .
3.2.2. Bus Enterprise Operating Costs
3.3. Constraints
3.3.1. Maximum and Minimum Interval between Departures
3.3.2. Minimum Load Rate
4. Cuckoo Search Algorithm Based Model Solving Method
4.1. Solution Process
4.2. Comparison of Algorithm Testing and Advantages
5. Example Verification Analysis
5.1. Nonlinear Weight Calculation
5.2. Calculation of Bus Scheduling Scheme
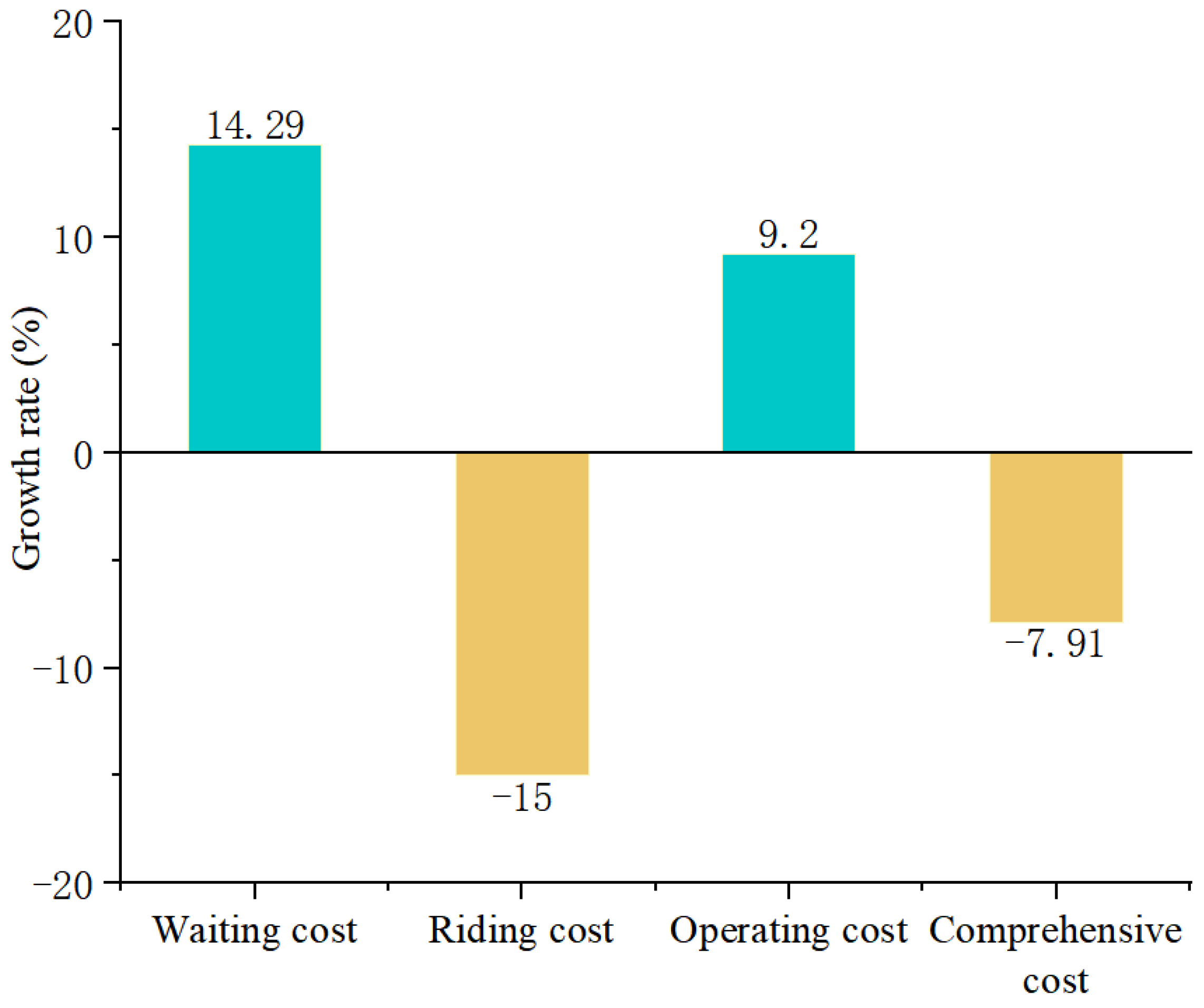
6. Results and Discussion
7. Conclusions
- The early and late peak periods of passenger flow with obvious unbalanced characteristics are analyzed. According to the passenger flow distribution characteristics, the grand station express and whole-journey buses are scheduled in a coordinated fashion along the direction of heavy passenger flow during peak periods, and the station correlation degree calculation model is used to determine the optimal grand station express bus stops.
- The optimization model of bus scheduling under unbalanced conditions is studied. Taking the waiting cost, riding cost and operating cost of passengers as the comprehensive cost of the bus line, and taking the lowest comprehensive cost as the optimization objective, a two-way bus scheduling optimization model for peak passenger flow is established.
- A nonlinear inertia dynamic weight cuckoo search algorithm (DWCS) is proposed. Taking a bus line as a study example, the algorithm is used to solve the established scheduling optimization model. The results show that the scheduling optimization model established in this paper is 8.56% and 7.91% lower than that obtained using traditional single scheduling in the morning and evening, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carey, M. Optimizing scheduled times allowing for behavioural response. Transp. Res. Part B Methodol. 1998, 32, 329–342. [Google Scholar] [CrossRef]
- Hassold, S.; Ceder, A. Multiobjective Approach to Creating Bus Timetables with Multiple Vehicle Types. Transp. Res. Rec. J. Transp. Res. Board 2012, 2276, 56–62. [Google Scholar] [CrossRef]
- Ceder, A. Optimal Multi-Vehicle Type Transit Timetabling and Vehicle Scheduling. Procedia-Soc. Behav. Sci. 2011, 20, 19–30. [Google Scholar] [CrossRef]
- Chu, J.; Korsesthakarn, K.; Hsu, Y.T. Models and a solution algorithm for planning transfer synchronization of bus timetables. Transp. Res. Part E Logist. Transp. Rev. 2019, 131, 247–266. [Google Scholar] [CrossRef]
- Takamatsu, M.; Taguchi, A. Bus Timetable Design to Ensure Smooth Transfers in Areas with Low-Frequency Public Transportation Services. Transp. Sci. 2020, 54, 1238–1250. [Google Scholar] [CrossRef]
- Berrebi, S.J.; Watkins, K.E.; Laval, J.A. A real-time bus scheduling policy to minimize passenger wait on a high frequency route. Transp. Res. Part B Methodol. 2015, 81, 377–389. [Google Scholar] [CrossRef]
- Gkiotsalitis, K. A model for the periodic optimization of bus scheduling times. Appl. Math. Model. 2020, 82, 785–801. [Google Scholar] [CrossRef]
- Adamski, A. Optimal adaptive scheduling control in an integrated public transport management system. In Proceedings of the 2nd Meeting of the EURO Working Groupon Urban Traffic and Transportation, Paris, France, 15–17 September 1993; pp. 413–438. [Google Scholar]
- HornM, E.T. Fleet scheduling and scheduling for demand-responsive passenger services. Transp. Res. Part C Emerg. Technol. 2002, 10, 35–63. [Google Scholar] [CrossRef]
- Dakic, I.; Yang, K.; Menendez, M.; Chow, J.Y. On the design of an optimal flexible bus scheduling system with modular bus units: Using the three-dimensional macroscopic fundamental diagram. Transp. Res. Part B Methodol. 2021, 148, 38–59. [Google Scholar] [CrossRef]
- Yang, X.; Liu, L. A Multi-Objective Bus Rapid Transit Energy Saving scheduling Optimization Considering Multiple Types of Vehicles. IEEE Access 2020, 8, 79459–79471. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, S.; Liu, H.; Liang, S. Design of limited-stop service based on the degree of unbalance of passenger demand. PLoS ONE 2018, 13, e0193855. [Google Scholar] [CrossRef]
- Luo, X.; Liu, Y.; Yu, Y.; Tang, J.; Li, W. Dynamic bus scheduling using multiple types of real-time information. Transp. B Transp. Dyn. 2019, 7, 519–545. [Google Scholar]
- Huang, Z.; Li, Q.; Li, F.; Xia, J. A Novel Bus-scheduling Model Based on Passenger Flow and Arrival Time Prediction. IEEE Access 2019, 7, 106453–106465. [Google Scholar] [CrossRef]
- Sun, F.; Wang, X.L.; Zhang, Y.; Liu, W.X.; Zhang, R.J. Analysis of Bus Trip Characteristic Analysis and Demand Forecasting Based on GA-NARX Neural Network Model. IEEE Access 2020, 8, 8812–8820. [Google Scholar] [CrossRef]
- Laporte, G.; Ortega, F.A.; Pozo, M.A.; Puerto, J. Multi-objective integration of timetables, vehicle schedules and user routings in a transit network. Transp. Res. Part B Methodol. 2017, 98, 94–112. [Google Scholar] [CrossRef]
- Hu, S.; Liang, Q.; Qian, H.; Weng, J.; Zhou, W.; Lin, P. Frequent-pattern growth algorithm based association rule mining method of public transport travel stability. Int. J. Sustain. Transp. 2021, 15, 879–892. [Google Scholar] [CrossRef]
- Hadas, Y.; Shnaiderman, M. Public-transit frequency setting using minimum-cost approach with stochastic demand and travel time. Transp. Res. Part B Methodol. 2012, 46, 1068–1084. [Google Scholar] [CrossRef]
- Tirachini, A.; Hensher, D.A. Bus congestion, optimal infrastructure investment and the choice of a fare collection system in dedicated bus corridors. Transp. Res. Part B Methodol. 2011, 45, 828–844. [Google Scholar] [CrossRef]
- Fouilhoux, P.; Barra-Rojas, O.J.; Kedad-Sidhoum, S.; Rios-Solis, Y.A. Valid inequalities for the synchronization bus timetabling problem. Eur. J. Oper. Res. 2016, 251, 442–450. [Google Scholar] [CrossRef]
- Yu, B.; Yang, Z.; Yao, J. Genetic algorithm for bus frequency optimization. J. Transp. Eng. 2010, 136, 576–583. [Google Scholar] [CrossRef]
- Tang, J.; Yang, Y.; Qi, Y. A hybrid algorithm for urban transit schedule optimization. Phys. A Stat. Mech. Appl. 2018, 512, 745–755. [Google Scholar] [CrossRef]
- Nam, K.; Park, M. Improvement of an optimal bus scheduling model based on transit smart card data in Seoul. Transport 2018, 33, 981–992. [Google Scholar] [CrossRef]
- Jiang, M.; Zhang, Y.; Zhang, Y. Multi-Depot Electric Bus Scheduling Considering Operational Constraint and Partial Charging: A Case Study in Shenzhen, China. Sustainability 2021, 14, 255. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Algorithm | Best Value | Worst Value | Average | Pass Rate |
|---|---|---|---|---|---|
| PSO | 0 | 0 | 0 | 100% | |
| CS | 5.1 × 10−9 | 1.6 × 10−6 | 5.9 × 10−7 | 100% | |
| DWCS | 0 | 0 | 0 | 100% | |
| PSO | 0 | 0 | 0 | 100% | |
| CS | 0.0003 | 0.0029 | 0.00108 | 90% | |
| DWCS | 0 | 0 | 0 | 100% | |
| PSO | 0 | 1.202 | 0.32 | 58% | |
| CS | 0.0023 | 0.9902 | 0.1815 | 60% | |
| DWCS | 0 | 0 | 0 | 100% |
| Parameter Category | Specific Parameters | Unit | Instance Value |
|---|---|---|---|
| Model Parameters | Persons | 32 | |
| Persons | 37 | ||
| Total length of the line in the upstream direction | km | 17.863 | |
| Total length of the line in the downstream direction | km | 19.466 | |
| s | 3 | ||
| s | 2 | ||
| RMB/min | 0.36 | ||
| RMB/min | 0.18 | ||
| RMB/km | 5 | ||
| RMB/min | 1.5 | ||
| — | 0.6 | ||
| — | 0.4 | ||
| % | 25 | ||
| Persons | 73 |
| Time Period | Upstream Interval (min) | Downward Interval (min) | Grand Station Express Bus (min) |
|---|---|---|---|
| Morning Peak | 8 | 6 | 11 |
| Evening Peak | 6 | 8 | 12 |
| Calculation Results | Scheduling Form | Unit | Morning Peak | Evening Peak |
|---|---|---|---|---|
| Waiting cost | Optimized scheduling | RMB | 8163.4 | 6027.8 |
| Single scheduling | 6569.6 | 5273.9 | ||
| Riding cost | Optimized scheduling | 46,235.2 | 24,578.8 | |
| Single scheduling | 54,212.8 | 28,915.3 | ||
| Operation cost | Optimized scheduling | 11,736.6 | 8393.8 | |
| Single scheduling | 10,894.7 | 7686.8 | ||
| Comprehensive cost | Optimized scheduling | 37,333.8 | 21,721.5 | |
| Single scheduling | 40,827.3 | 23,588.2 | ||
| Comprehensive cost comparison | ↓8.56% | ↓7.91% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Liu, B.; Jiao, F.; Song, Z.; Zhao, P.; Wang, X.; Sun, F. Optimization Method of Combined Multi-Mode Bus Scheduling under Unbalanced Conditions. Sustainability 2022, 14, 15839. https://doi.org/10.3390/su142315839
Li D, Liu B, Jiao F, Song Z, Zhao P, Wang X, Sun F. Optimization Method of Combined Multi-Mode Bus Scheduling under Unbalanced Conditions. Sustainability. 2022; 14(23):15839. https://doi.org/10.3390/su142315839
Chicago/Turabian StyleLi, Dalong, Benxing Liu, Fangtong Jiao, Ziwen Song, Pengsheng Zhao, Xiaoqing Wang, and Feng Sun. 2022. "Optimization Method of Combined Multi-Mode Bus Scheduling under Unbalanced Conditions" Sustainability 14, no. 23: 15839. https://doi.org/10.3390/su142315839
APA StyleLi, D., Liu, B., Jiao, F., Song, Z., Zhao, P., Wang, X., & Sun, F. (2022). Optimization Method of Combined Multi-Mode Bus Scheduling under Unbalanced Conditions. Sustainability, 14(23), 15839. https://doi.org/10.3390/su142315839