1. Introduction
With fast-increasing technology, a new paradigm shift is occurring, considering alternative marine fuels that promise safer, greener, and more efficient ships than ever before in response to stringent international legislative requirements. The first change occurred during the First Industrial Revolution in the 1800s when mechanical power was introduced, and vessels began to be driven by steam-powered coal engines. The Second Industrial Revolution began in the early 1900s when the advent of diesel engines improved the efficiency and reliability of ships by using oil as a new fuel. The internet–digital revolution, representing the Third Industrial Revolution, introduced computerized ship control in the 1970s. With the introduction of gas as a fuel, such as liquefied natural gas (LNG) [
1,
2,
3,
4,
5], we are taking a step closer to the new paradigm linked with cyber-physical systems and autonomy as part of “Shipping 4.0 [
6,
7,
8]”.
Porathe et al. [
9] present four reasons why autonomous shipping is seen as a feasible choice: (1) the efforts to reduce transportation costs; (2) the need for a better onboard working environment for crews and the prevention of future seafarer shortages; (3) the need to reduce emissions on a worldwide scale; and (4) the desire to improve shipping safety. According to a 2010 report submitted to the International Maritime Organization (IMO) by the Baltic and International Maritime Council (BIMCO) and the International Shipping Federation (ISF), the shipping industry is expected to face tightening labor markets, with recurrent shortages of ship officers [
10], due to hazardous working conditions and extended periods away from land. Under the fiercely competitive economy of scale, the shipping industry has seen downward pressure on freight rates and excess capacity. Reduced ship pollution and emissions and improved ship safety are more important than ever with the emergence of low- or zero-carbon alternative fuels [
11].
Under these conditions, the launch of maritime autonomous surface ships (MASS) will be a watershed moment that will either disrupt or precipitate a paradigm shift in the shipping sector and maritime transport system. Therefore, communication and coordination among stakeholders, particularly those involved in the maritime and port industries, would be required for the safe, effective, and efficient adoption and operation of MASS. As a result, critical concerns related to autonomous shipping and their impact on policy, technology, and industry should be investigated together with their interaction for a successful introduction and smooth settlement of MASS and associated infrastructures in the marine industry.
On the regulatory side, the IMO agreed to conduct a regulatory scoping exercise (RSE) to assess the safe, secure, and environmentally sound operation of MASS [
12]. However, the RSE would be a complicated issue because it would touch a few areas, including safety, security, contacts with ports, pilotage in the event of an incident, and the marine environment. In addition, international maritime conventions, such as the International Convention for the Safety of Life at Sea (SOLAS), the International Regulations for the Prevention of Collisions at Sea (COLREG), and the Standards for Training and Certification of Watchkeepers (STCW), apply to MASS [
13]. Therefore, IMO Member States will be asked to review the scope of their domestic laws considering the RSE.
Technological development will improve ships’ control capabilities, communication, and interfaces using the newest information and communications technology (ICT) systems. As a result, they will soon be operated by remote land-based or offshore services [
14]. Unmanned watercraft have already been deployed for military, aeronautical, and research purposes. Deep-sea exploration also uses submersible unmanned vehicles, such as autonomous underwater vehicles (AUV) and remotely operated vehicles (ROV), which are still being developed. However, regarding safety, efficiency, and environmental protection, the technology that replaces manning must outperform the personnel [
15].
On the industrial side, autonomous vehicles are already being developed in various means of transportation, such as airplanes, trains, and automobiles. Therefore, MASS is expected to significantly impact shipbuilding, equipment, and devices, as well as shipping and port infrastructures in the maritime industry. Furthermore, autonomy, automation, unmanned operation, big data, enterprise-grade connectivity, and analytics will steadily grow in the maritime industry [
16]. As a result, good communication and coordination with essential stakeholders, particularly the shipping, shipbuilding, and port industries, are required to implement MASS properly.
To the best of the authors’ knowledge, several review studies have discussed briefly or deeply the regulatory challenges concerning MASS. The authors’ discussions and interviews with maritime experts such as naval officers, senior marine engineers, and naval architects inspired this essay. In this paper, the authors have chosen to focus on all the effects that MASS may have on the maritime industry at the human level (such as training and education), legislative level (definition of transparent laws and regulations), and technological level (such as security navigation). The paper presents some reflections on the obstacles and issues that need to be clarified soon. It does not deal with data based on experiments, calculations, or quantified scenarios. The primary motivation of the authors is to present the magnitude of these challenges and the work that remains to be done to achieve safe autonomous surface ship navigation worldwide.
The structure of the present paper is as follows. We first introduced the latest projects on global trends for building autonomous vessels. Second, the impact of MASS on regulations, technology, and industries has been explored, as well as their relationships to uncover both previous and future efforts to prepare for the new maritime paradigm change. Finally, other essential problems, e.g., safety, security, jobs, training, ethics, liability, and insurance, were explored to obtain greater insight regarding future shipping that is efficient, reliable, safe, and sustainable.
2. Global Autonomous Vessel Developments
The shipping industry has recently faced changes due to the Fourth Industrial Revolution. One such transition is the AI (artificial intelligence), robots, IoT (internet of things), and autonomous vehicles paradigm shift in technological progress [
17]. Big data and the achievements of the Third Industrial Revolution have been integrated with AI and IoT technology to enable smart shipping. Autonomous ships, e-Navigation, and smart ports are further examples of marine transportation advancements.
Many companies, including Rolls Royce, DNV, the Norwegian University of Science and Technology (NTNU), and Norway’s Kongsberg, have announced ambitious intentions to create all-electric and autonomous container ships by 2020, as shown in
Table 1. Other groups worldwide are working on similar, if not competing, concepts and systems to enable unmanned operations and infrastructure initiatives, such as autonomous ports and high-speed communications.
In 2012, the European Commission-funded project Maritime Unmanned Navigation through Intelligence in Networks (MUNIN) began looking into unmanned ships’ feasibility in various areas, including technical maturity, economic benefits, social impact, and safety during deep-sea voyages [
18,
19]. Following the MUNIN project, DNV and NTNU launched the Revolt as a specific research project to build an autonomous, zero-emission, and short-sea vessel to help manage traffic congestion in urban regions on the EU’s road network [
20,
21].
The Advanced Autonomous Waterborne Applications Initiative (AAWA), founded by Rolls-Royce in 2015, is another notable initiative related to autonomous vessels. This project brought together a diverse group of stakeholders, including universities, ship designers, equipment manufacturers, and classification societies, to examine the economic, social, legal, regulatory, and technological barriers that must be overcome for autonomous ships to become a reality. Its goal is to provide preliminary designs for the future generation of innovative ship solutions, complete with technical specifications [
22].
The Yara Birkeland is one of the most recent autonomous ship initiatives. Yara and Kongsberg built the world’s first totally electric container feeder vessel. Reducing up to 40 thousand truck travel in densely populated urban areas is estimated to significantly cut NO
X and CO
2 emissions while enhancing road safety and alleviating traffic congestion [
23,
24].
Last but not least, the e5 project is a Japanese consortium dedicated to developing renewable energy-powered commercial ships. The name “e5” refers to the partnership’s five “focus points”: electrification, environment, evolution, efficiency, and economics. The e5 Tanker claims to be the world’s first entirely electric oil tanker, with a 3.5 MWh battery that can “operate non-stop for 10 h on a half-capacity battery”, according to the company [
25]. In addition, the ship will have a high level of automation [
26] and will be charged using wind and solar energy to cut emissions further [
27].
3. Problems and Challenges Facing the Regulatory Process
The fact that all technical shipping rules relating to the safety of navigation, environmental protection, and training/watchkeeping standards were designed with the idea that humans would do some functions must be reviewed in the context of autonomous vessels. A few instances are sufficient to demonstrate the flaws in the current regulatory structure if applied to the MASS operations without modification. Chapter V, regulation 24 of the International Convention for the Safety of Life at Sea (SOLAS) 1974 requires that manual control of the ship’s steering be established promptly in dangerous navigational situations, or an autonomous ship without a crew will be unable to comply with this law [
28]. Regulations that need human judgment are a more complex matter. It is unclear how this law would apply to vessels designed to make navigational decisions using algorithms based on data collected from their sensors. Rule 2 of the International Regulations for Preventing Collisions at Sea (COLREGs) 1972, for example, states that nothing shall exonerate any vessel, or the owner, master, or crew thereof, from the consequences of any neglect or any precaution which may be required by ordinary practice of seamen. Those developing the new technology often remind us that deep learning based programs are flexible and react to and from the new patterns which are programmed to identify, meaning that a program could learn situational awareness and the subjective aspects of COLREGs. Even so, this poses a significant challenge to those who seek to regulate the matter.
Additionally, there are severe risks in today’s fully automated ships, such as sensor defects and software errors. For example, aviation incidents involving the Boeing 737 MAX in 2018 and 2019 are examples where the airplane’s angle sensors gave the altitude control system inaccurate information. As a result, the airplane crashed because it was challenging to bypass the mechanism manually. As a result, under the current blame system, harm brought on by improper algorithms may be categorized as a product defect (and hence a technical failure) and negligence (based on the root issue).
Although there is no definitive answer at this time regarding how, if at all, regulations like the COLREGs will be modified for MASS application, it is a crucial topic of discussion in the maritime sector. The implementation of the COLREGs with MASS is facing numerous obstacles, based on the information at the time this article was written. For most of the rules, participants preferred the original COLREGs. However, some rules were preferred with modest modifications. Most of these findings are consistent with the regulatory scoping exercise conclusions from the IMO. Adding or refining meanings for terminology, e.g., “master and crew”, “the common practice of sailor”, “crew ashore”, and “lookout” were among the most popular revisions.
Additionally, an all-around colored MASS-identifying light was selected to add different traffic separation schemes that are required for MASS. Since almost 75% of participants preferred more than one amendment over the original regulation, it was clear that participants were amenable to some adjustment. Additionally, those who have had more practice using the COLREGs demonstrated a modest propensity toward selecting the revised rules compared to participants who had had less practice. To better train seamen for the future as the maritime sector adopts autonomy, it is crucial that MASS and its impact on the COLREGs and other IMO instruments are further investigated immediately.
3.1. Impact on Regulation
Despite the rapid advancement of science and technology in the marine industry, autonomous vessels must unquestionably adhere to international standards in order to operate securely between nations and even seabed areas outside of national authority. Although some parts of manned vessel regulation, such as some clauses of the International Safety Management (ISM) Code, may be compatible with unmanned vessels, there is a need for unique international rules to consider the characteristics of unmanned vessels. A request for RSE was recently submitted to the Maritime Safety Committee (MSC) and was incorporated into the MSC work plan at MSC 98 [
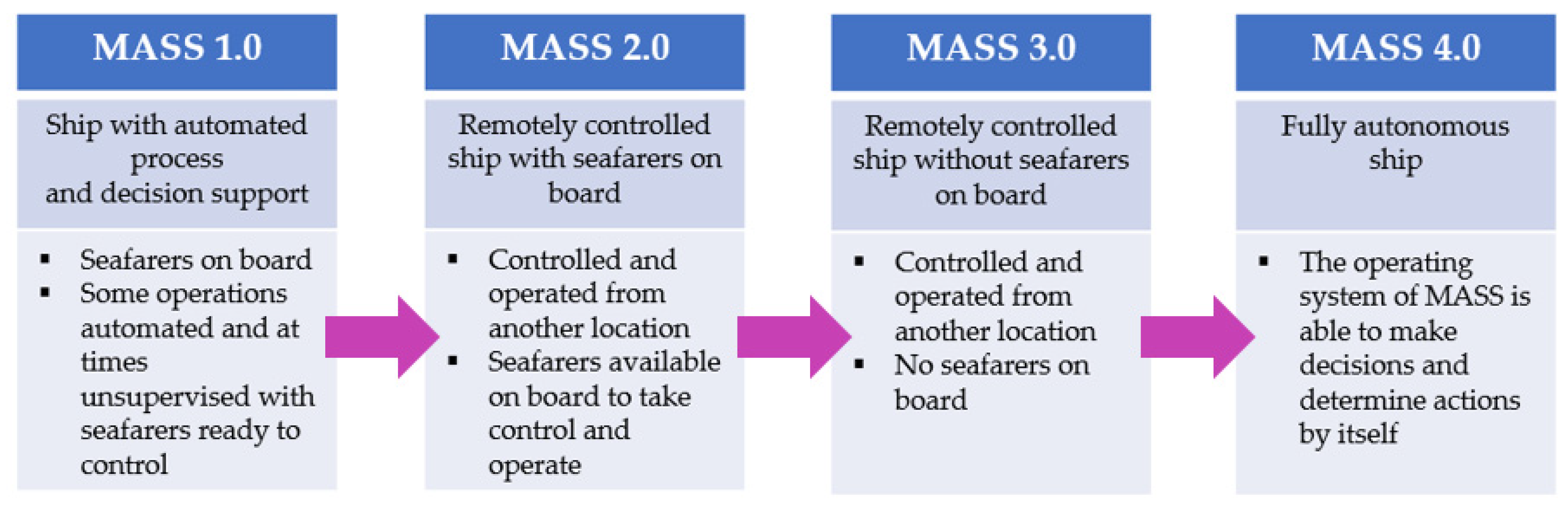
29] to ensure MASS safety, security, and environmental soundness. The RSE for MASS aims to determine the degree of autonomy that may affect existing regulatory frameworks to address MASS operations. The degrees of autonomy at MSC 100 [
30] were divided into four phases to help with the RSE process (see
Figure 1). One should emphasize that MASS can operate in multiple levels of autonomy during a single voyage.
All conventions seem obsolete, and new regulatory standards will be needed. It is recommended that all IMO committees and subcommittees work together using the goal-based approach. The MSC recently authorized a revision of generic principles for producing IMO goal-based standards (GBS) to set safety goals and functional requirements while considering the whole MASS lifetime [
31]. Risk assessment and software quality assurance (SQA) will be necessary, in addition to the GBS, for MASS’s safety in both the real and virtual worlds.
Autonomous shipping is a new technology requiring an international regulatory or harmonization between existing regulatory rules for all states’ territorial waters. The matter is further complicated as rules and regulations are embodied in several international agreements over the last century or so, in some cases after years of negotiations conducted by the international community. Until an international consensus on regulating this new technology is reached, it is doubtful that autonomous ships will operate in international waters beyond any state’s territorial waters [
32].
3.2. Impact on Technology
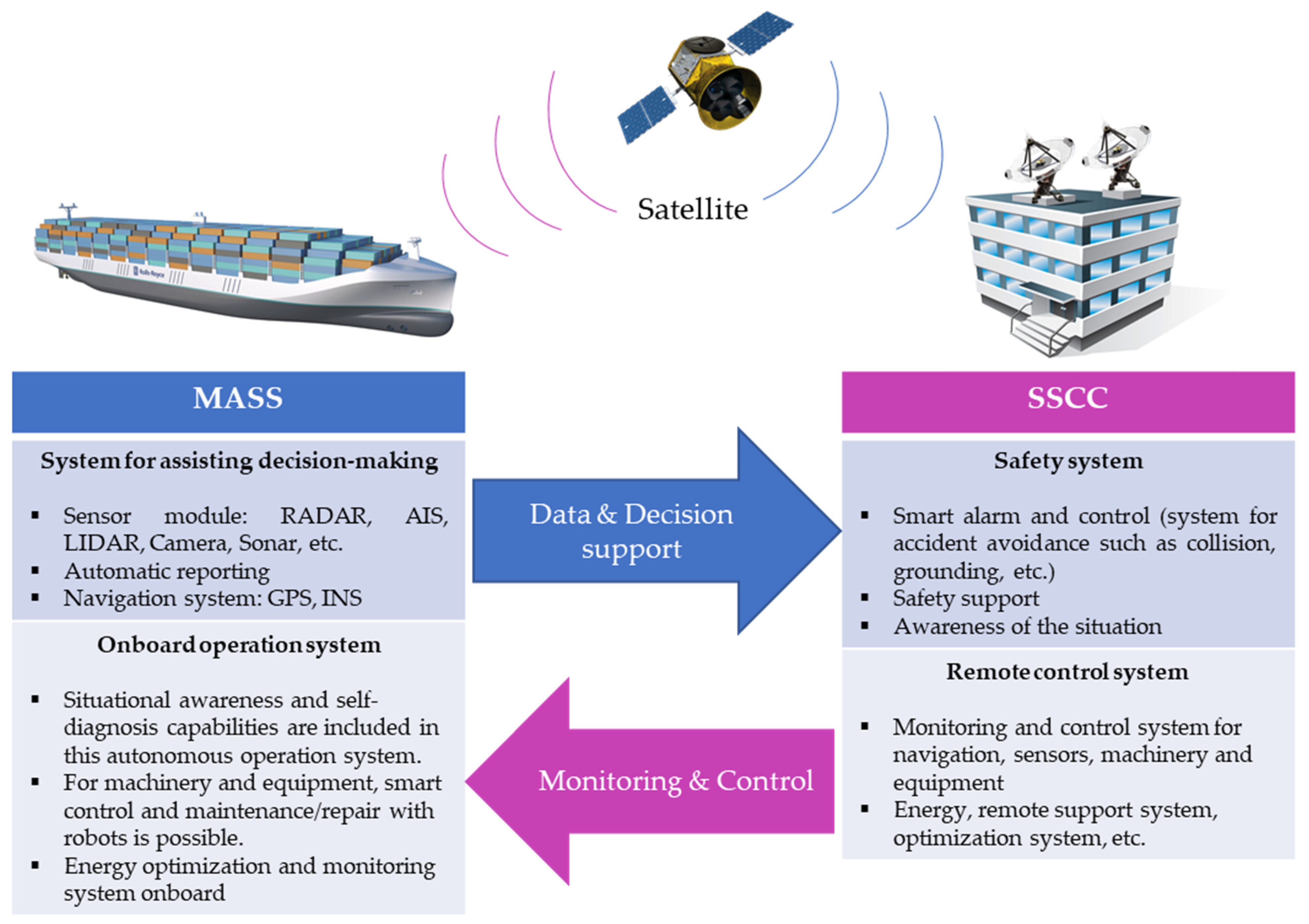
Demonstrating that autonomous systems are at least as safe as piloted ship systems and providing the ship shore control center (SSCC) with enough situation awareness represent one of the most challenging issues in building the technology for MASS. The ship systems should be remotely monitored and managed by the operators of the SCC to obtain essential information through satellite at short intervals in case of emergencies such as rescue attempts or evasive maneuvers. If the autonomous system fails, the SSCC should include a smart alarm system and the capacity to transition to manual control mode.
Figure 2 depicts the MASS and SSCC systems, their essential equipment and operations, and the relationship formed by satellite data.
The sensors’ dependability must be ensured through design approval, remote and on-premises testing, and monthly inspections, particularly for sensors that support monitoring and decisions from SCC. Sensor failures pose a significant risk to the system’s safety. Therefore, the most significant safety sensors should consider redundancy, diagnostics, prognosis, and homogeneous and heterogeneous redundancy. It’s worth noting that heterogeneous redundancy is more dependable than others because it can eliminate sensor-type dependency [
33]. A more extensive elicitation of experts could also be advantageous to overcome various concerns connected to threats affecting autonomous ships’ safe and efficient operations due to a lack of failure data and easy access to the data.
The Relevance of Cyber Risks Management for Shipping Operations
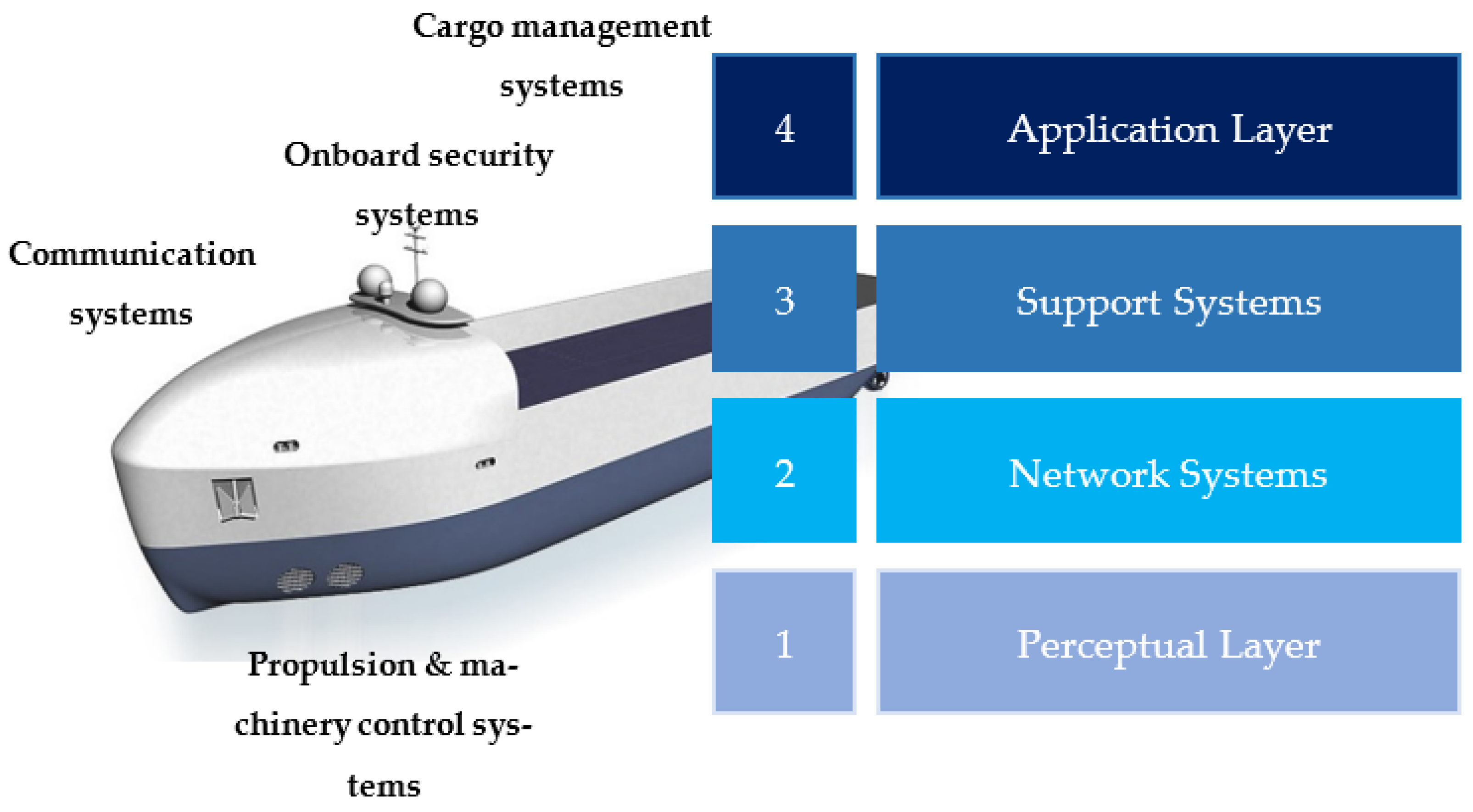
Based on their complexity, transportation systems may have the following four levels of cyber systems:
The first is the perceptual layer, which uses components, such as wireless sensors and GPS, to connect the cyber and physical worlds. The second type is network systems, which it’s used to convey data (e.g., satellite networks and the internet mobile communication network). The third tier is the support layer, which includes cloud computing and intelligent computing, and the fourth layer is the application layer, which connects people and the physical world to cyber systems (e.g., intelligent transportation and environmental monitoring), see
Figure 3. All these four layers are present in the context of the modern vessel. Such integration is achieved utilizing Ethernet Industrial Protocols that collect and process data via wireless and fiber optic sensors, cameras, radars, satellite communications, and cloud computing.
While the integration of technology promises to make sea transportation safer, more ecologically friendly, and entertaining while lowering costs, it also raises the risk of disrupted vessel operations. The rising use of information technology (IT) systems during marine transportation eliminates the need for the perpetrator to bypass physical security measures, as happened in the 9/11 attacks. Taking control of a vessel or disrupting its operation can now potentially be achieved electronically by remotely interfering with any other of these four layers. Interference can be achieved in a variety of ways, the most prominent of which are as follows:
Injecting malicious software, such as malware, viruses, trojans, and worms, into a vessel’s IT-controlled power management system or navigational system, which could corrupt chart data stored in an electronic chart display and information system (ECDIS); a failure occurring during ship software maintenance [
34]. Such instances may force the vessel to remain in port until the malicious software is removed, fresh ECDIS computers are installed, and a classification surveyor is present [
35].
Spoofing or jamming a vessel’s positioning systems, such as the Global Positioning System (GPS) or Global Navigation Satellite System (GNSS), or the tracking system of containers.
Infecting the ship’s primary server with ransomware, encrypting sensitive files and apps relating to customs, passengers, and scheduling, and allowing only ransom payment to unlock them [
36].
By-pass the firewalls between the vessel’s public and safety-critical network and gain access to operationally critical data and processes.
The IMO was alarmed by two events in particular: the first occurred in 2017, when at least 20 vessels in the Black Sea appeared in the automatic identification system (AIS) 20 miles inland, close to a Russian airport [
37], and the second occurred between 2011 and 2013 when a criminal gang infiltrated the container tracking system at the Port of Antwerp located in Flanders (Belgium) and stole containers in which illicit substances were hidden, unbeknownst to their owners [
38].
The IMO, alerted by such instances, emphasized the necessity for enterprise-wide cyber risk management by all industry stakeholders, including public authorities and commercial companies. Given that interconnectivity is the fundamental pillar of digitalized and autonomous operations, it’s understandable that those recommendations would be addressed to such a large audience. However, perhaps the most critical recommendation of the IMO is that a cyber risk management program is included in safety management systems.
3.3. Impact on Industry
The shipping industry has relied on the knowledge and experience of ship crews for hundreds of years. With unmanned vessels, autonomous technology is designed to revolutionize the marine sector. Small autonomous boats have already entered operation, while larger vessel technology is still developing. It is time for the marine industry to embrace autonomy and comprehend how it will influence the industry’s future and how to utilize it best. MASS will affect ship design, shipbuilding, and port infrastructure, including services and interfaces. On-shore shipping ports will be transformed by automation, from port infrastructure and cargo handling to land-based logistics and transportation. One of the logistics industry’s goals is to provide fast service, which allows shippers and customers to adjust dispatches and receive deliveries from this self-contained logistics transport chain on the fly [
39].
Communication and cooperation among MASS stakeholders based on mutual understanding will be critical to the MASS’s successful introduction to the marine industry.
Figure 4 depicts the main stakeholders and their relationships. Stakeholders in the maritime sector would include seafarers onboard and ashore, insurance companies, cargo and bunkering corporations, research institutions, universities, and training centers. Furthermore, autonomous vessels will transform existing industries by introducing system integration and control, system management and maintenance, SSCC operation and management, fleet management, cybersecurity, big data analysis, smart sensors, and communication. Furthermore, to make autonomous ships effective and dependable, development, alteration, and interpretation of maritime rules and regulations, as well as communication and cooperation among stakeholders, are essential for the MASS to be successful.
3.4. Impact on Jobs and Training
While the marine business is rapidly expanding, finding suitably skilled sailors is a constant challenge. Lloyds Register [
40], in particular, forecasted severe shortages of skilled officers and crews by 2025. Furthermore, the introduction of MASS has generated concerns about the seafarers and positions to be replaced by AI and autonomous systems. However, this change will trigger new business and jobs for highly qualified crews and operators, particularly those with knowledge of technology, IT systems, engineering, and public relations and regulations [
41].
Crewmembers’ training needs to focus on different skills and competencies, from seafaring skills and automation and communication engineering knowledge, where the engineering support team ensures the communication between the shore team and the automated ship in an efficient, bidirectional way [
42]. In addition, watchkeeping personnel and companies have an essential role in ensuring safe faring. For practicing challenging safety situations, a well-designed simulator is used, but the only problem with that simulator is the inability to create real-time challenging safety situations, which require creativity and deep knowledge of seagoing accidents. Thus, ship operators require a combination of nautical and technological expertise, such as voyage planning, digital and port approaches for communication duties, mooring, unmooring, ship monitoring, and docking [
40,
41,
42].
The use of automation could mitigate the predicted worker shortage. Many maritime jobs will be transferred to land-based SSCC due to remote and autonomous operations, allowing the industry to recruit new people who find a marine career onshore more appealing. It is also expected that autonomous ships will improve seafarers’ quality of life. The difficulties of staying on board for extended periods and the risks of marine mishaps will be reduced if ships are controlled from the shore.
MASS on-shore operators receive relevant training and education under the International Convention on Standards of Training, Certification, and Watchkeeping for Seafarers (STCW). However, in light of the declining number of seafarers, it may also be essential to explore developing new STCW Convention qualifying criteria or new knowledge, understanding, and proficiencies. Thus, while applying a reliable maritime education and training (MET), qualified trainers must be considered along with their ability to teach and assess their trainees. An effective training methodology must hold a cognitive, psychomotor, and affective learning approach with clear objectives corresponding to the domain and level of the required competencies. Moreover, the trainers must be creative and engage the trainees in the learning process by promoting a leadership spirit in an appropriate way, i.e., seeing, thinking, and applying what is learned. Finally, continuous educational research and training must be provided to face future challenges in shipping while applying MASS.
3.5. Issue of Laws and Ethics
The industry has embraced advanced and new technologies to boost productivity, cut costs, and increase safety. As there is a mutual influence of regulations and technologies, effective and timely regulatory procedures are essential for the industry to profit from the benefits of the technology entirely. Traditionally, liability has been given to human individuals or organizations that are considered legal entities, such as shipping companies. An algorithm is not regarded as a moral or legal agent, and assigning blame for wrongdoing is impossible. This issue was thoroughly analyzed in the automotive industry. The testing of classic examples of moral problems is part of the argument about the safety of self-driving cars [
41]. The ISM Code (SOLAS Chapter IX) requirements to establish a legal organization responsible for the safe operation of ships and pollution prevention, for example, will continue to apply to the MASS [
42].
The development and use of autonomous ships will raise a wide range of ethical challenges. Human communication has dominated ship operations in the past, but the implementation of MASS includes man–machine and machine–machine communication. This implementation’s risk or change assessment should include analysis and protocols of cases in which machine communication fails or is denied. The definition of legal liability boundaries, particularly the establishment of reasonable criteria and scopes of responsibility between shipowner and manufacturer, is required, as well as an appropriate security structure for insurance coverage.
As an example, consider the following inquiry on the ethical issue. It was thought that a MASS would take the most cost-effective path. However, a manned passenger ship capsized near the MASS, and communication systems between the MASS and the manned ship were unavailable or misdirected, leaving the crews and passengers on the capsized ship with little choice but to wait for assistance. Unfortunately, the MASS may be unable to distinguish the passenger ship in dangerous circumstances. Who is liable for failing to recognize the ship and perform rescue duties?
4. Discussion
IMO convention’s standards are structured into several categories. Many of those standards will need revision as some may be obsolete.
One is detailed control requirements. The existing SOLAS method assumes a physical navigation bridge with an officer of the watch stationed on it, from which the vessel may be controlled immediately. This is the basis for several distinct criteria. For example, there are standards for steering gear, propulsion controls, propeller pitch controls, and watertight compartment controls to be supplied on the bridge, as well as voice communications provisions. Another example of this regulation is the need for pilot transfers to be supervised by a certified person with bridge communication. These will need to be updated primarily to allow for shore-based control.
Second, the precise criteria for electronic communications systems presume that there is a crew on board who is in regular contact with the shore and other vessels. Both radar and onboard radio people, a VHF unit on the bridge, constant radio watch, and other requirements are among them. Communications systems include the facilities for sending distress calls by at least two separate and independent means, equipment capable of receiving shore-to-ship distress alerts and transmitting and receiving ship-to-ship distress alerts, and search and rescue coordinating communications. It also requires on-scene communications, maritime safety information, general radio communications to and from shore-based radio systems, and bridge-to-bridge communications. There are further needs for the master to convey any navigational dangers he encounters, in addition to the hardware requirements [
43,
44,
45]. Considering all these obligations, most of these communications must be preserved. No one wants the requirement for radio watch on distress frequencies, the ability to send distress calls, or inter-ship communication to go away in the case of autonomous shipping. Even the ability to receive maritime safety notices on board may be helpful, if only because they will need to be relayed if the shore-based controller is outside the transmitting station’s range. However, the standards will need to be changed to relate to radio signals being relayed to and from the shore-based controller via the vessel rather than to someone on the vessel.
Third, clarification is needed as to numerous references in the IMO conventions to the master. The Comite Maritime International (CMI) has produced a spreadsheet in its submission to the IMO identifying provisions in the IMO regulations that will need clarification or amendment to deal with unmanned vessels. It also identifies numerous provisions with the comment interpretation of the master.
Fourth, the International Maritime Organization must adopt new regulations to deal with autonomous vessels that do not have a crew on board. Finally, training and certification standards for remote onshore controllers will need to be added to the STCW. These should only be found in countries that have signed the MARPOL convention.
SOLAS must also be addressed in terms of what it does not include. For example, the features required of the communications and remote-control devices used to manage the vessel while at sea are entirely dependent on autonomous shipping. Therefore, it will have to deal with issues such as the following in-depth:
The reliability of propulsion and other machinery, such as steering gear, will have to be controlled for long periods, possibly weeks, from a distance with limited possibilities of interim maintenance.
The reliability of ancillary mechanisms used to start, stop, control, and reverse the propulsion machinery. This will be especially crucial while maneuvering, avoiding collisions, and stopping the vessel when necessary. A failure in any of these areas might be catastrophic.
The method of notifying shore controllers of risks to the vessel or cargo, such as fire, smoke, or water ingress.
Similarly, pollution detection and avoidance devices. For example, there would be sensitive devices to detect leaks of bunker oil, as well as fail-safe technology for self-sealing tanks and transferring oil from a burst tank to another storage location.
The communication arrays and other electronics to be carried, and their capabilities.
The methods for transmitting signals to the vessel, their effectiveness, and any backup or spare capacity that may be necessary.
5. Conclusions
Regarding safety, security, and environmental protection conventions and regulations for autonomous surface ships, there are new and distinct concerns to be addressed. As a result, before MASS is introduced into commercial shipping, more holistic, worldwide, and unified approaches for new regulatory frameworks to the MASS must assure the prevention of marine accidents and environmental protection. It is also crucial to comprehend the MASS’s impact on legislation, technology, and industries and the interactions among relevant players. While some preliminary studies have been completed, various projects are underway or planned worldwide to develop pilot ships, competing concepts and systems to support unmanned operations, and infrastructure initiatives such as autonomous ports and high bandwidth communications. The MASS should be monitored and managed remotely by the SSCC’s operators, with a smart alarm system receiving critical information through satellite. The MASS and SSCC systems and sensors must be designed and built, and their synergetic effects must be carefully examined. Onboard equipment and devices will need to be interconnected to efficiently gather, manage, and analyze data from the MASS. They will be heavily modularized to avoid failures and have a high degree of redundancy and endurance. The MASS will affect ship design, shipbuilding, and port infrastructure, including services and interfaces.
Communication and cooperation among numerous stakeholders based on mutual understanding would be critical for a successful introduction of the MASS to the maritime industries, including shipping, shipbuilding, equipment production, and classification societies. MASS can modify pirate, terrorist, and criminal behavior patterns. By establishing new inspection procedures, technical and institutional considerations should be made to increase security. While the number of seafarers is expected to decline, developing qualification criteria for MASS onshore operators and providing relevant training and education will be critical. Regarding legal and ethical concerns, the time it takes for technology to mature vs. the time it takes to implement relevant legislation and procedures may negatively impact the timely adoption of innovations. A quantitative analysis of the influence of the MASS on technologies and industries, including economic consequences, will be addressed as part of future work.












{kind=link}
{kind=link}
{kind=link}
{kind=link}