



Water Column Detection Method at Impact Point Based on Improved YOLOv4 Algorithm


Abstract
1. Introduction
2. Basics of YOLOv4 Algorithm
2.1. The Principle of YOLOv4 Algorithm
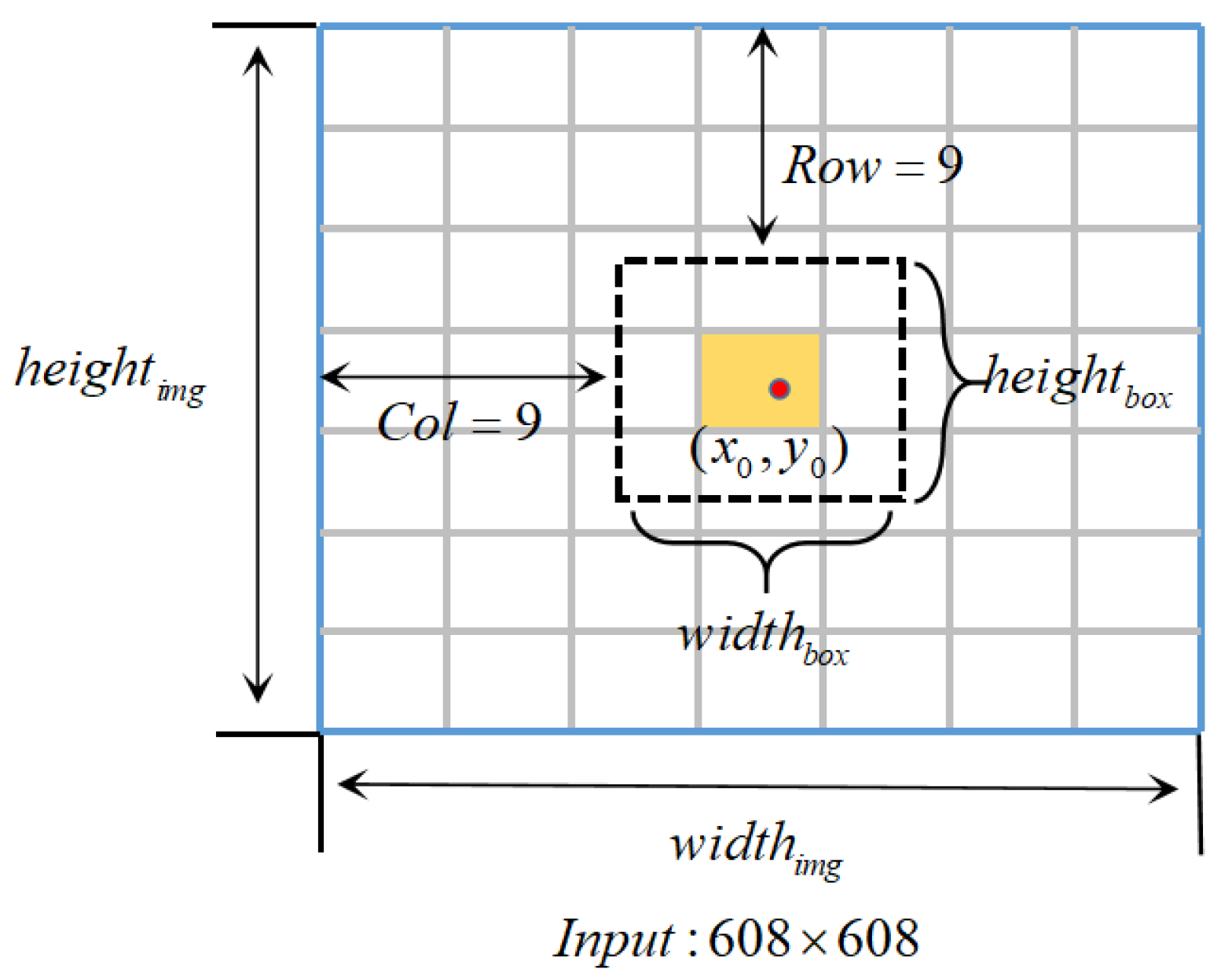
- (1)
- Normalize the width and height of the bounding box according to Equations (2) and (3):
- (2)
- Normalize the coordinates of the center point according to Equations (4) and (5):
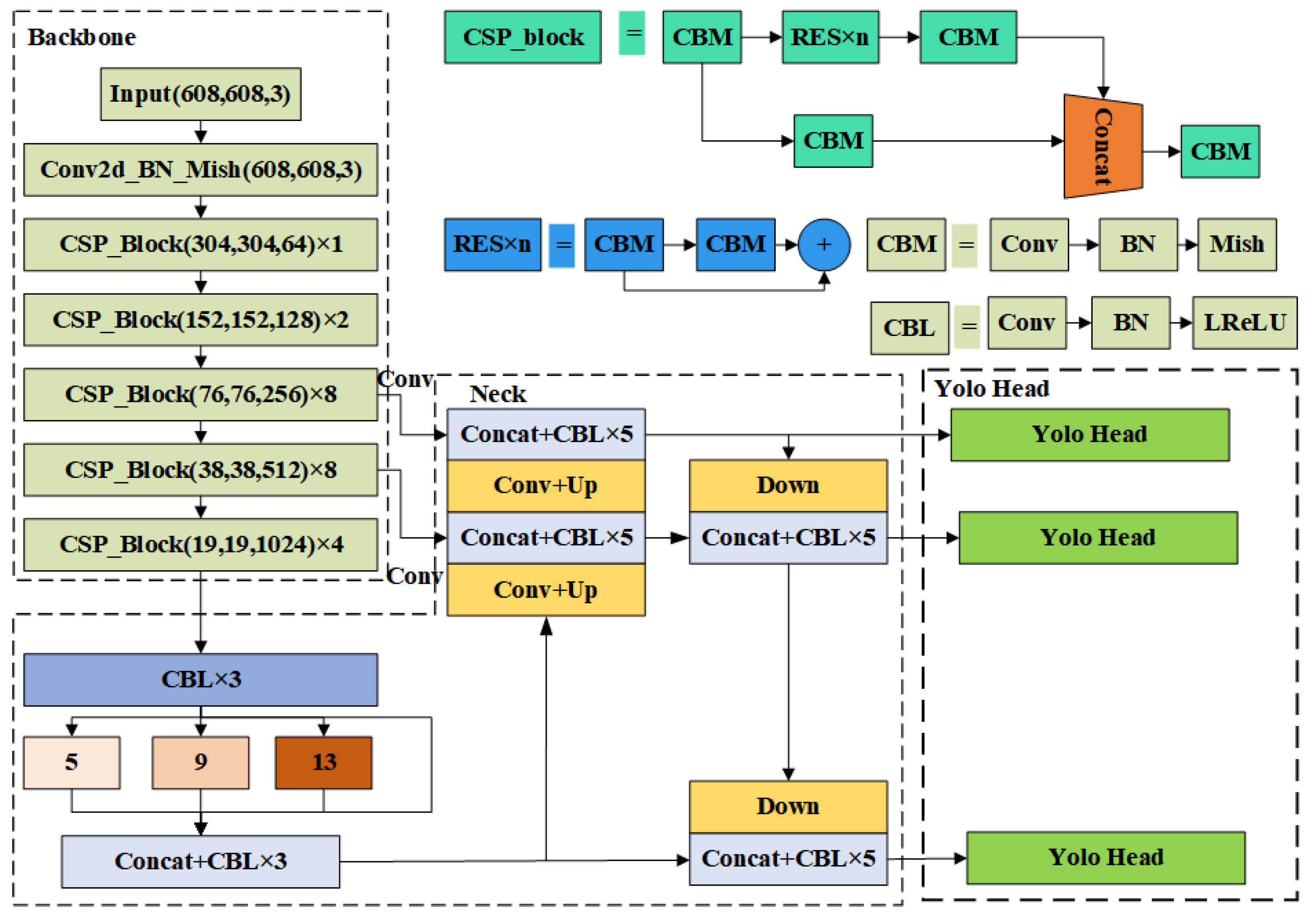
2.2. The Network Structure of The YOLOv4 Algorithm
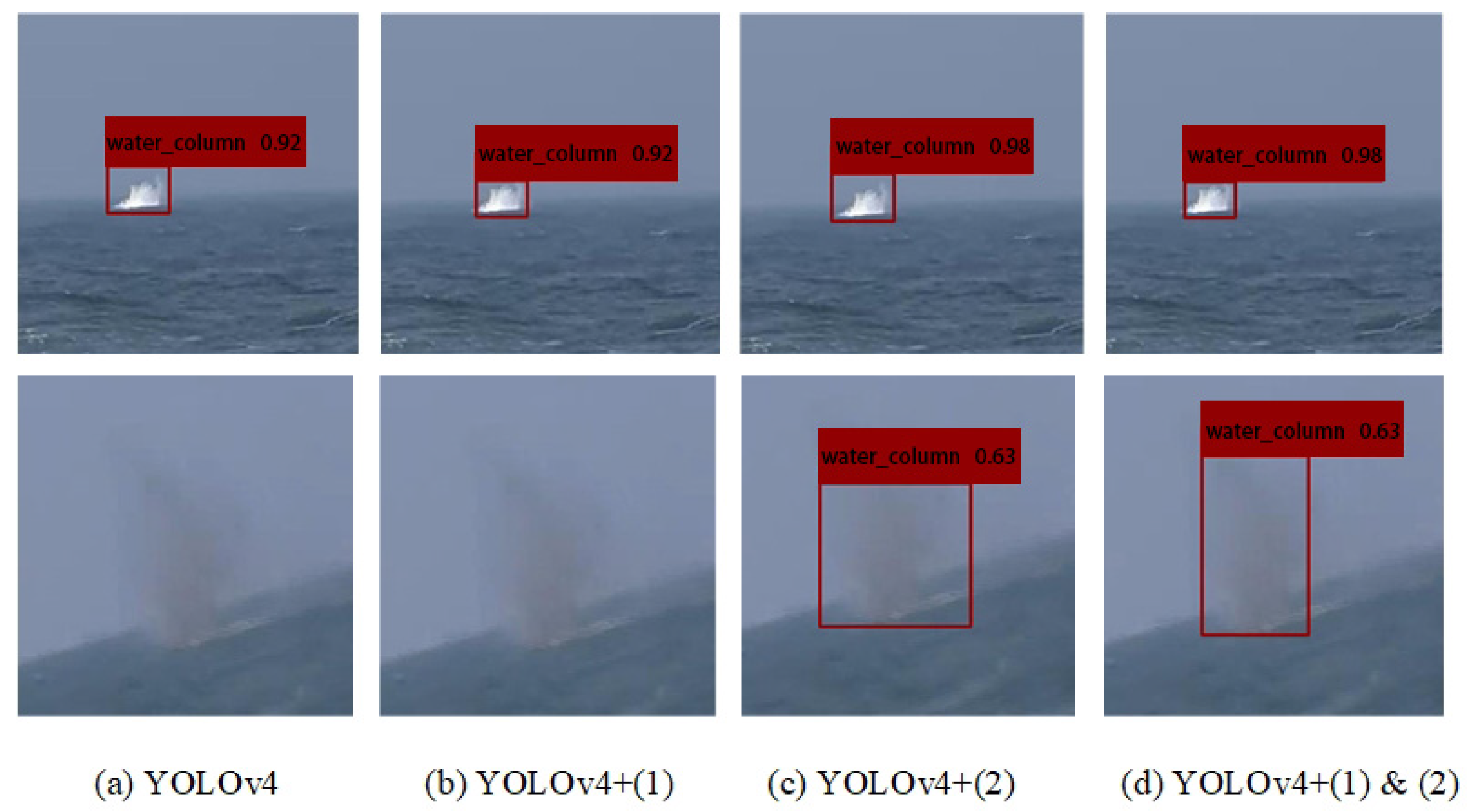
3. Improved YOLOv4 Algorithm
- (1)
- Sea antenna detection based on Hoffman space.
- (2)
- DBSCAN + K-means clustering algorithm analysis prior box.
- (3)
- Improved PANet structure based on CBAM.
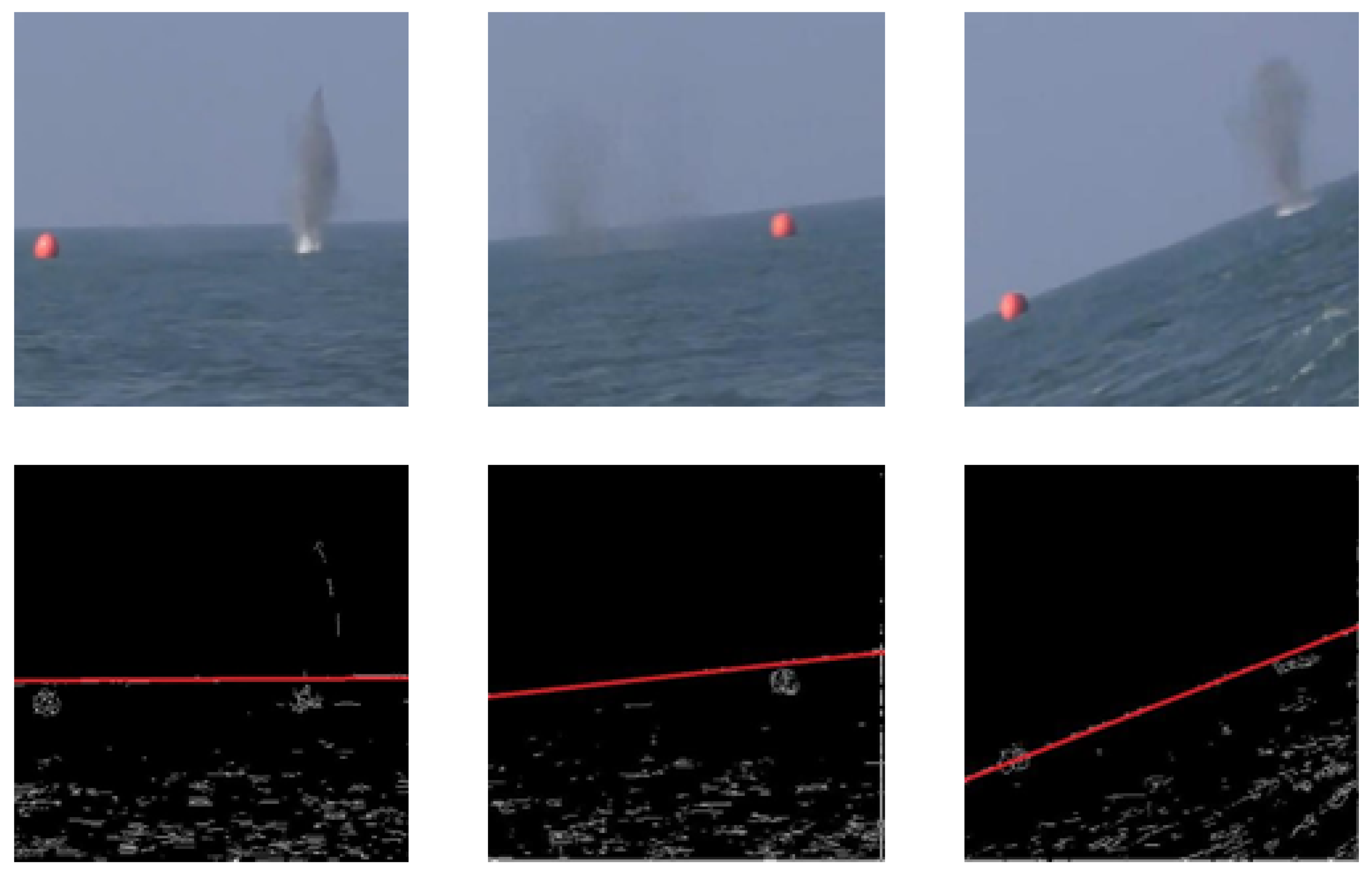
3.1. Sea Antenna Detection Based on Hoffman Space
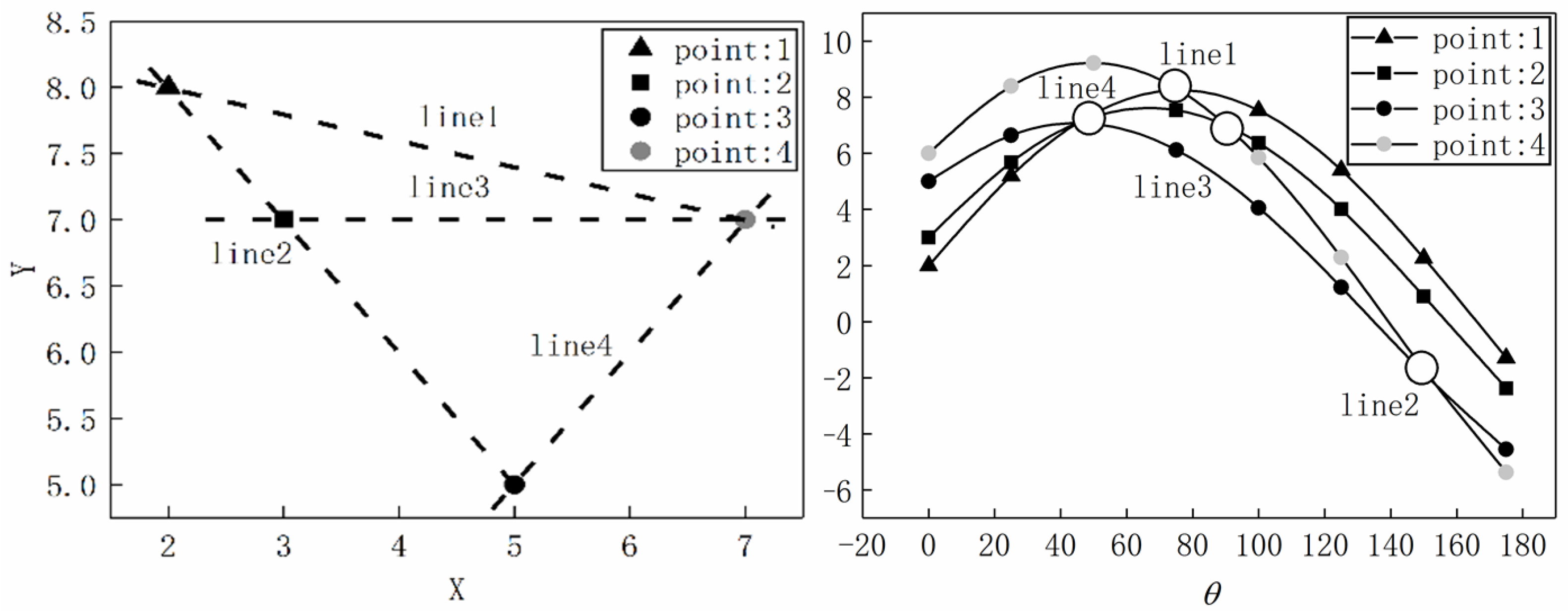
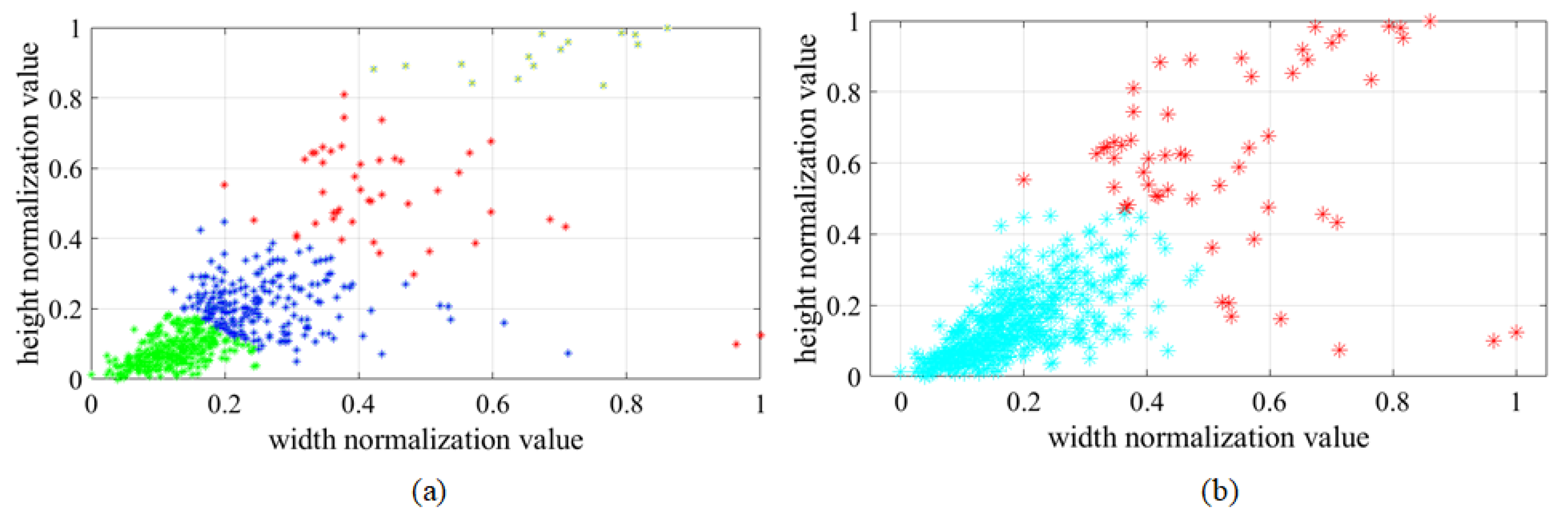
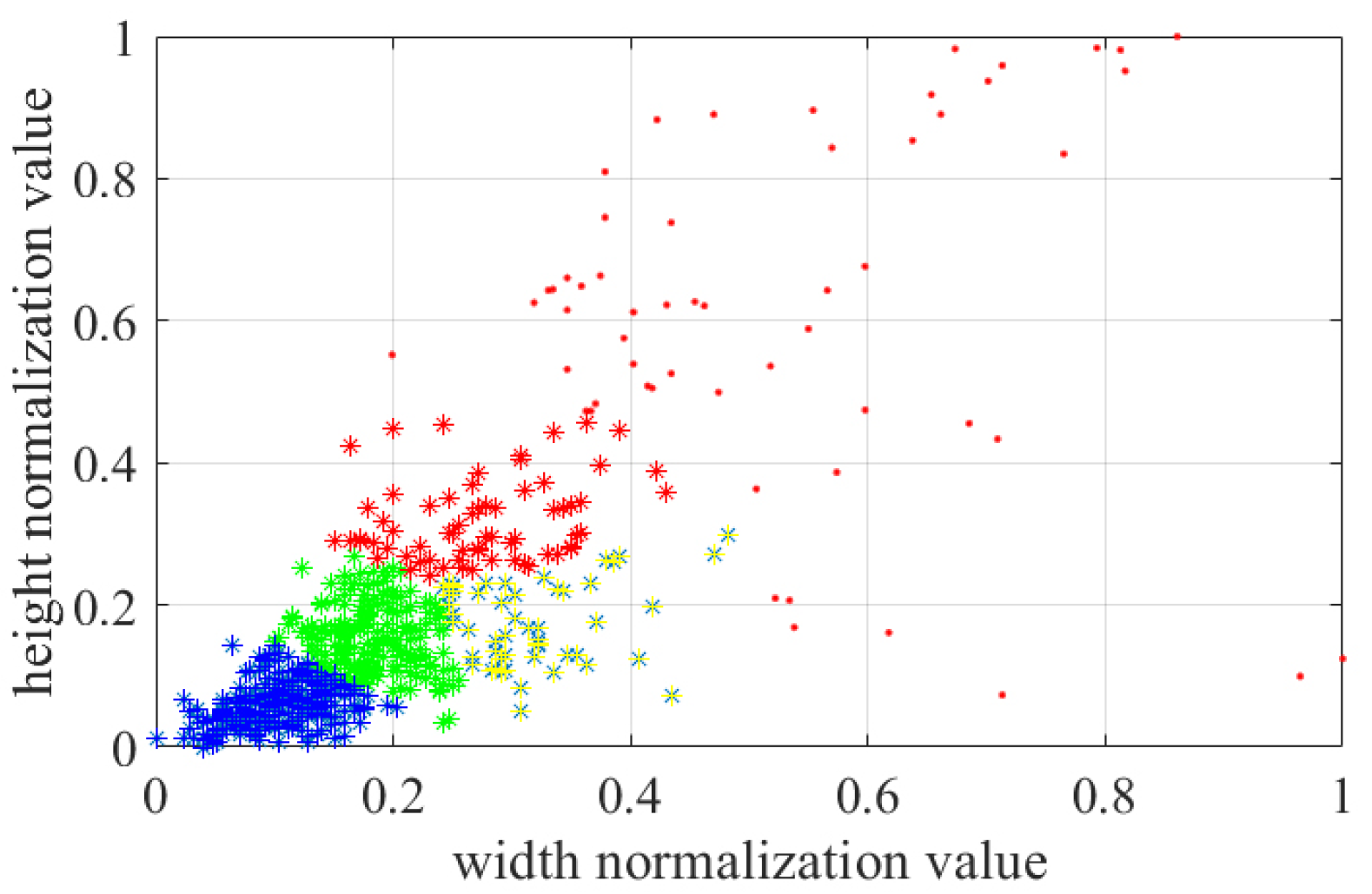
3.2. DBSCAN + K-Means Algorithm Analysis Prior Box
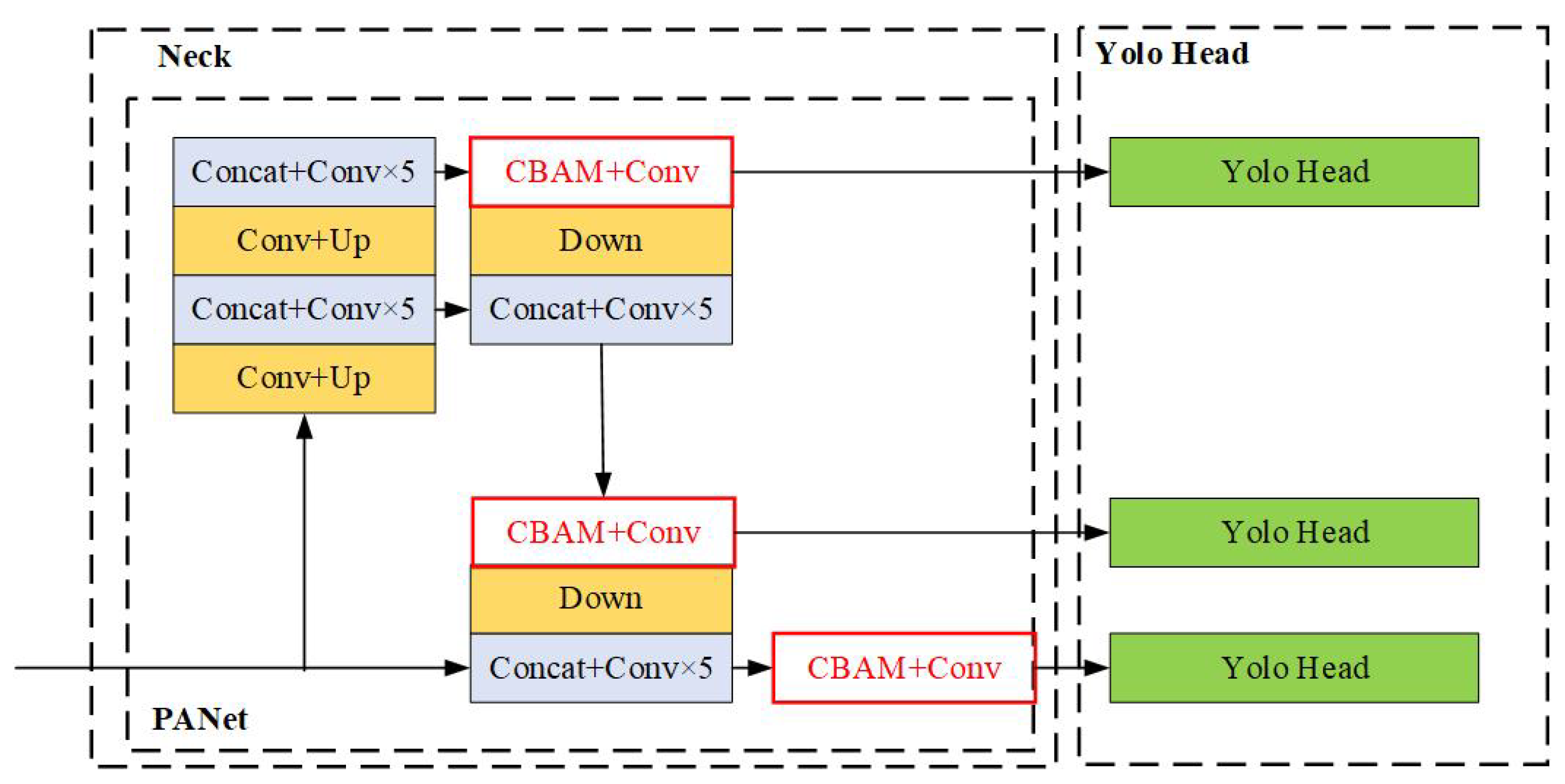
3.3. Improved PANet Structure Based on CBAM
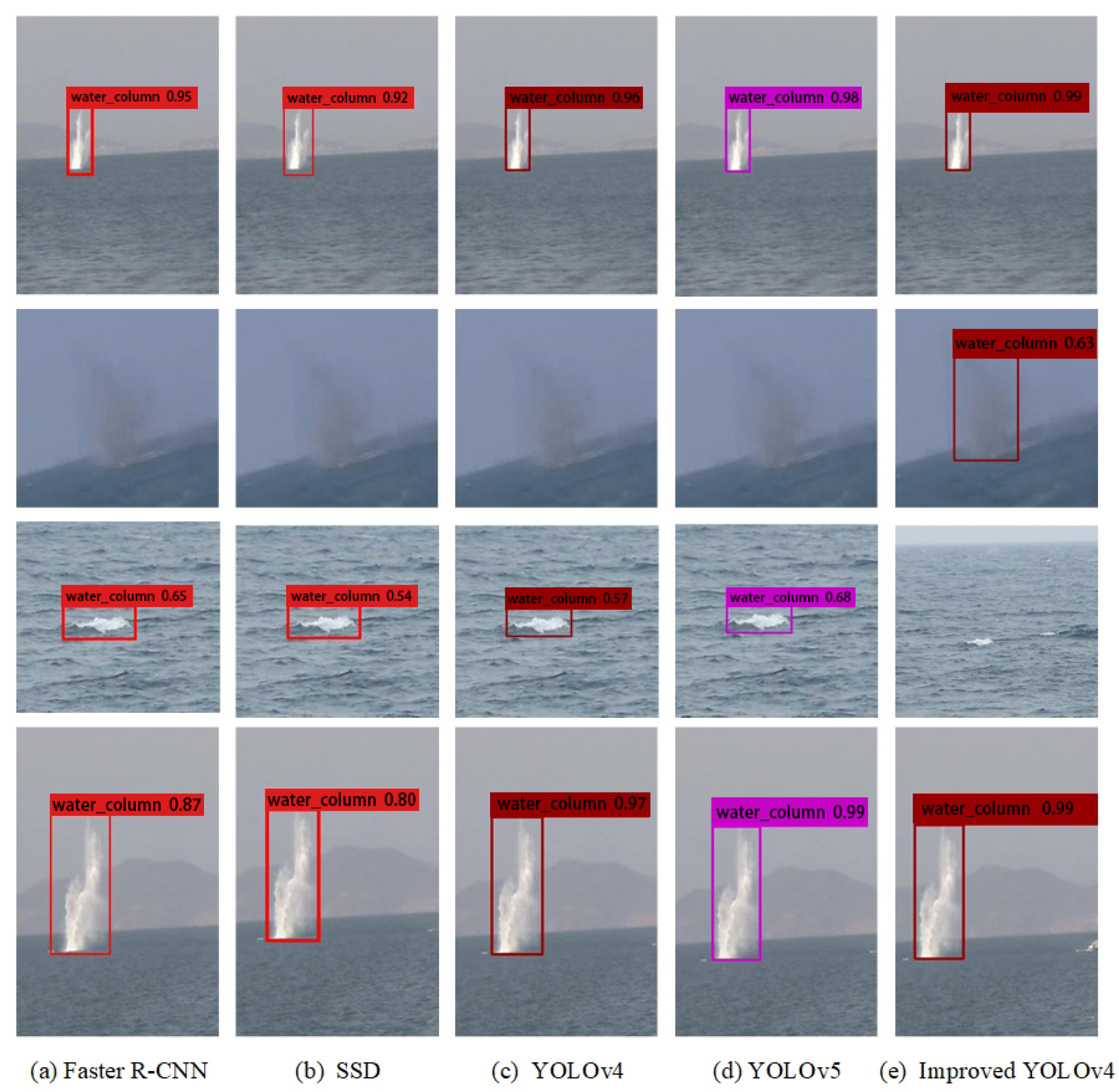
4. Results and Discussion
4.1. Introduction to Test Platform
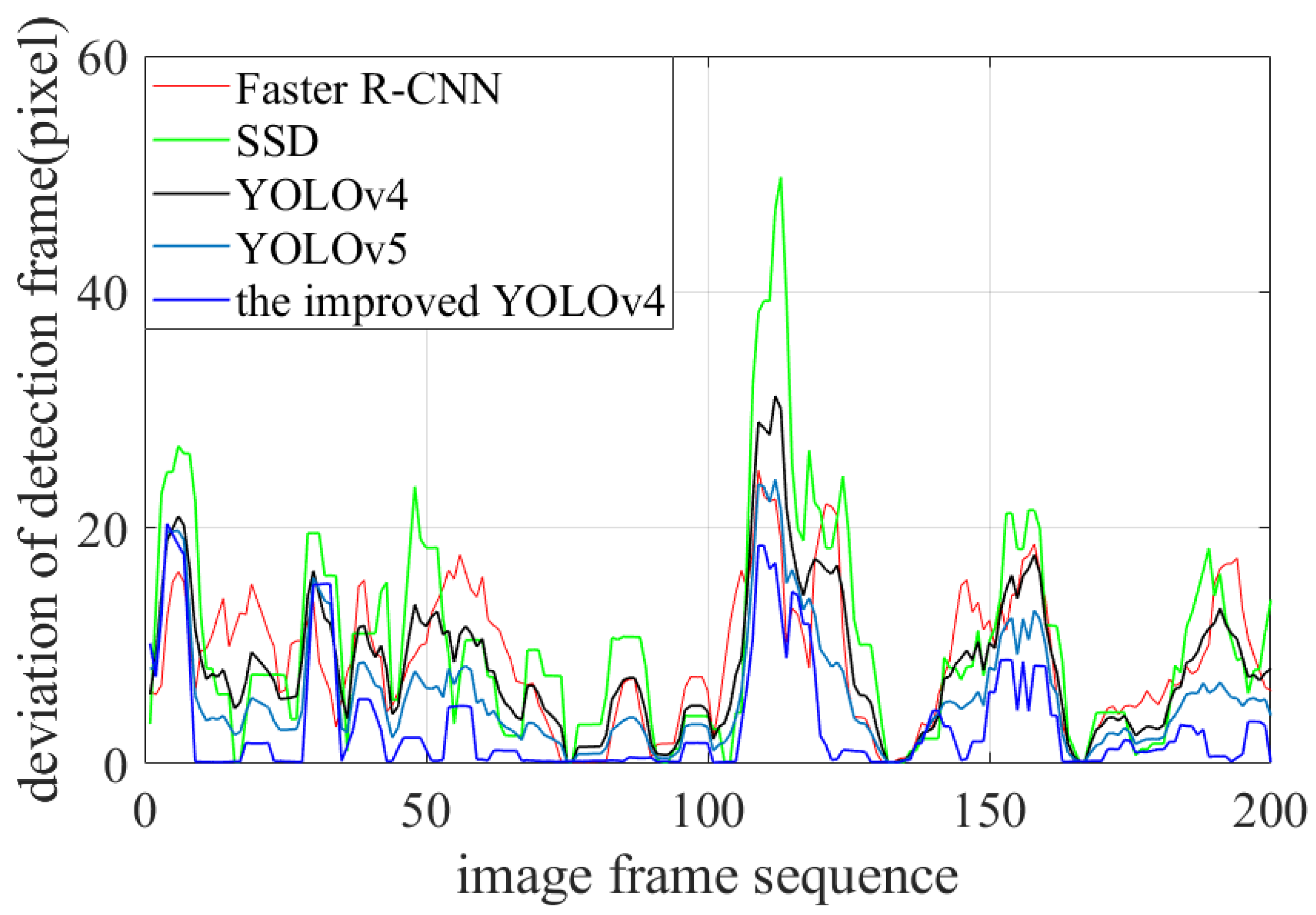
4.2. Evaluating Indicator
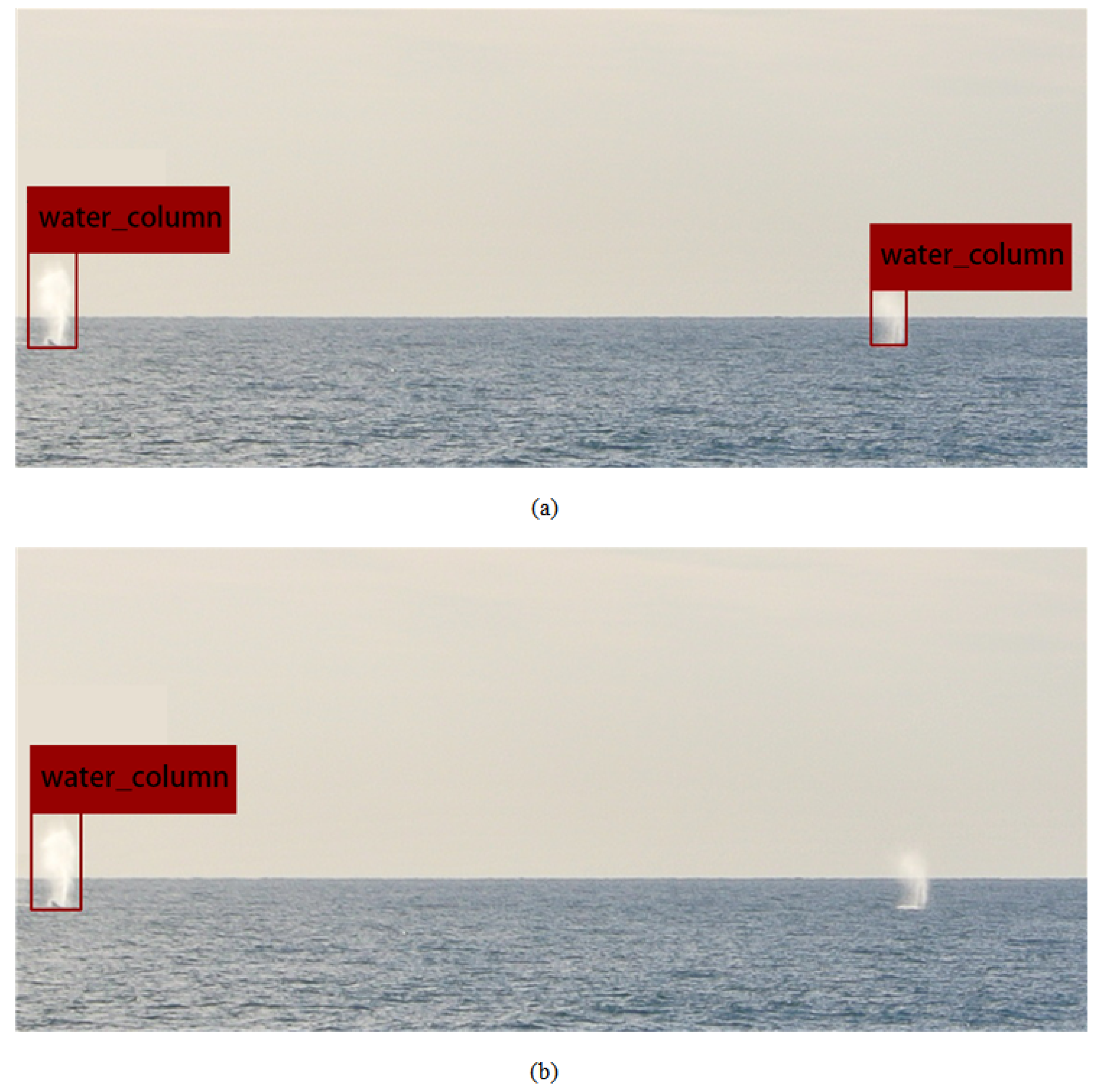
4.3. Experimental Result
5. Conclusions Remarks and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Y.-S.; Ji, S.-Y.; Du, B.-B. Marine impact water column signal detection algorithm based on improved Faster R-CNN. Weapon Equip. Eng. 2022, 43, 182–189. [Google Scholar]
- Fang, Z.-P.; He, H.-J.; Zhou, G.-M. Overview of Target Detection Algorithms. Comput. Eng. Appl. 2018, 54, 11–18. [Google Scholar]
- Wang, Y.-C.; Chen, Q. Blind watermarking algorithm based on SIFT and Radon transform. Electron. Des. Eng. 2022, 30, 180–184. [Google Scholar]
- Zhang, H.-Y.; Bai, J.-J.; Li, Z.-J. Scale invariant SURF detector and automatic clustering segmentation for infrared small targets detection. Infrared Phys. Technol. 2022, 83, 7–16. [Google Scholar] [CrossRef]
- Shi, H.; Cao, J.-F.; Chen, L.-C.; Pan, L.-H. PCA-SIFT Feature Extraction Algorithm of Coal Mine Image in Hadoop Platform. J. Taiyuan Univ. Sci. Technol. 2022, 41, 124–129. [Google Scholar]
- Song, Y.-P.; Huang, H.; Ku, F.-L.; Fan, D.-D. Face recognition algorithm based on MB-LBP and tensor high order singular value decomposition. Comput. Eng. Des. 2021, 42, 1122–1127. [Google Scholar]
- Ma, Q.; Zhang, X.-Z.; Li, H.-F.; Deng, H.X. A moving object detection algorithm based on spectral residual algorithm and clustering algorithm. Comput. Engeering Sci. 2018, 40, 1867–1873. [Google Scholar]
- Quan, J.; Jia, M.-T.; Lin, B. Development of a core feature identification application based on the Faster R-CNN algorithm. Eng. Appl. Artif. Intell. 2022, 1159, 52–60. [Google Scholar]
- Sun, Y.-C.; Pan, S.-G.; Zhao, T. Detection and Recognition of Traffific Lights Based on Faster R-CNN. Acta Opt. Sin. 2020, 40, 143–151. [Google Scholar]
- Huang, Z.; Sui, B.; Wen, J. An intelligent ship image/video detection and classifification method with improved regressive deep convolutional neural network. Complexity 2020, 23, 4–13. [Google Scholar]
- Zeng, F.-L.; Ying, L.; Yang, Y. A detection method of Edge Coherent Mode based on improved SSD. Fusion Eng. Des. 2022, 179, 20–30. [Google Scholar] [CrossRef]
- Chen, Z.-C.; Guo, H.-Q.; Yang, J.; Jiao, H.; Feng, Z.; Chen, L.; Gao, T. Fast vehicle detection algorithm in traffic scene based on improved SSD. Measurement 2022, 201, 263–270. [Google Scholar] [CrossRef]
- Huang, H.; Sun, D.; Wang, R. Ship Target Detection Based on Improved YOLO Network. Appl. Sci. 2020, 17, 1–10. [Google Scholar] [CrossRef]
- Bai, G.-G.; Hou, J.-M.; Zhang, Y.-W.; Li, B.; Han, H.; Wang, T.; Hinkelmann, R.; Zhang, D.; Guo, L. An intelligent water level monitoring method based on SSD algorithm. Measurement 2021, 185, 2233–2241. [Google Scholar] [CrossRef]
- Pan, W.-G.; Chen, Y.-H.; Liu, B. Traffific Light Detection Based on YOLOv3 Optimization Algorithm. Transducer Microsyst. Technol. 2019, 38, 147–149. [Google Scholar]
- Li, Q.; Zhao, F.; Xu, Z.-P. Improved YOLOv4 algorithm for safety management of on-site power system work. Energy Rep. 2022, 8, 737–746. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, X.-H.; Li, B.-B. Automatic shrimp counting method using local images and lightweight YOLOv4. Biosyst. Eng. 2022, 22, 20–32. [Google Scholar] [CrossRef]
- Prasetyo, E.; Suciati, N.; Fatichah, C. Yolov4-tiny with wing convolution layer for detecting fish body part. Comput. Electron. Agric. 2022, 198, 68–75. [Google Scholar] [CrossRef]
- Fu, H.; Song, G.; Wang, Y. Improved YOLOv4 Marine Target Detection Combined with CBAM. Symmetry 2021, 130, 62–78. [Google Scholar] [CrossRef]
- Dong, X.-D.; Yan, S.; Duan, C.-Q. A lightweight vehicles detection network model based on YOLOv5. Eng. Appl. Artif. Intell. 2022, 113, 52–59. [Google Scholar] [CrossRef]
- Li, M.-J.; Wang, H.; Wan, Z.-B. Surface defect detection of steel strips based on improved YOLOv4. Comput. Electr. Eng. 2022, 102, 45–53. [Google Scholar] [CrossRef]
- Tan, L.; Lv, X.-Y.; Lian, X.-F. YOLOv4 Drone: UAV image target detection based on an improved YOLOv4 algorithm. Comput. Electr. Eng. 2021, 93, 45–52. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2004, arXiv:2004.10934. [Google Scholar]
- Zhao, W.-Y.; Liu, S.-Y.; Li, X.-Y.; Han, X.; Yang, H. Fast and accurate wheat grain quality detection based on improved YOLOv5. Comput. Electron. Agric. 2022, 202, 168–182. [Google Scholar] [CrossRef]
- Qi, J.; Liu, X.; Liu, K.; Xu, F.; Guo, H.; Tian, X.; Li, M.; Bao, Z.; Li, Y. An improved YOLOv5 model based on visual attention mechanism: Application to recognition of tomato virus disease. Comput. Electron. Agric. 2022, 194, 10–25. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, Z.-J.; Zhang, Y. A Fast Target Detection Method in SAR Images Improved by YOLOv4 Tiny. Comput. Eng. Appl. 2022, 26, 1–10. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Detection Algorithm | Faster R-CNN | SSD | YOLOV4 | YOLOV5 | Proposed |
|---|---|---|---|---|---|
| Detection speed (FPS) | 25 | 29 | 33 | 34 | 31 |
| mAP | |||||
| 14.7 | 18.6 | 14.3 | 13.2 | 10.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Sun, S.; Shi, Z.; Zheng, C.; She, B. Water Column Detection Method at Impact Point Based on Improved YOLOv4 Algorithm. Sustainability 2022, 14, 15329. https://doi.org/10.3390/su142215329
Shi J, Sun S, Shi Z, Zheng C, She B. Water Column Detection Method at Impact Point Based on Improved YOLOv4 Algorithm. Sustainability. 2022; 14(22):15329. https://doi.org/10.3390/su142215329
Chicago/Turabian StyleShi, Jiaowei, Shiyan Sun, Zhangsong Shi, Chaobing Zheng, and Bo She. 2022. "Water Column Detection Method at Impact Point Based on Improved YOLOv4 Algorithm" Sustainability 14, no. 22: 15329. https://doi.org/10.3390/su142215329
APA StyleShi, J., Sun, S., Shi, Z., Zheng, C., & She, B. (2022). Water Column Detection Method at Impact Point Based on Improved YOLOv4 Algorithm. Sustainability, 14(22), 15329. https://doi.org/10.3390/su142215329