
Application of Unmanned Aerial Vehicles in Logistics: A Literature Review


Abstract
1. Introduction
2. Methodology
- To present a framework of the content of the last two years of drones in logistics.
- To review the literature on logistics drones in the last two years and classify these studies into two main categories: theoretical models and application scenarios. In addition, we explore the relationship between the use and sustainability of drones in theoretical models and application scenarios.
- Current research priorities and hotspots are identified and research gaps in the applied branches of logistics drones are understood for future research.
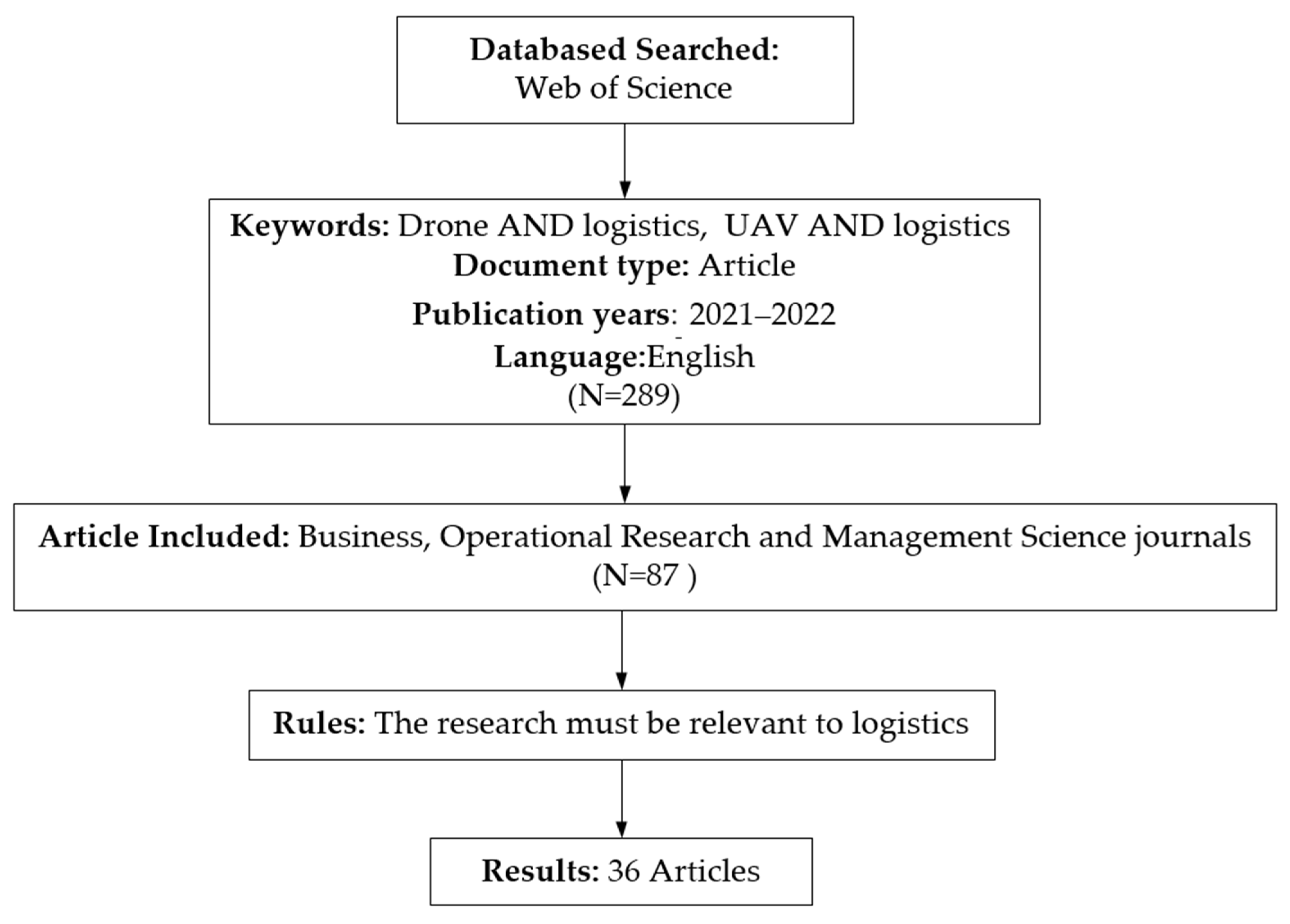
2.1. Literature Collection
2.2. Literature Collection Results
3. Application of UAVs in Logistics
3.1. Theoretical Models
3.1.1. The Traveling Salesman Problem
3.1.2. Other Path Planning Problems
3.1.3. Summary of Theoretical Models and Related Sustainability Issues
3.2. Application Scenarios
3.2.1. Medical Security Issues
3.2.2. Last-Mile Delivery Problems
3.2.3. Summary of Application Scenarios Summary and Related Sustainability Topics
3.3. Other Problems
4. Future Research Directions
4.1. Path Planning Problems
4.2. Medical Safety Issues
4.3. Last-Mile Delivery Problems
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Patella, S.M.; Grazieschi, G.; Gatta, V.; Marcucci, E.; Carrese, S. The adoption of green vehicles in last mile logistics: A systematic review. Sustainability 2020, 13, 6. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Pt. C-Emerg. Technol 2020, 120, 102762. [Google Scholar] [CrossRef]
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-mile delivery concepts: A survey from an operational research perspective. OR Spectr. 2021, 43, 1–58. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res 2020, 123, 105004. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research avenues for drone-based models in logistics: A classification and review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Li, H.; Chen, J.; Wang, F.; Bai, M. Ground-vehicle and unmanned-aerial-vehicle routing problems from two-echelon scheme perspective: A review. Eur. J. Oper. Res 2021, 294, 1078–1095. [Google Scholar] [CrossRef]
- Liang, Y.J.; Luo, Z.X. A Survey of Truck-Drone Routing Problem: Literature Review and Research Prospects. Journal of the Operations Research Society of China 2022, 10, 343–377. [Google Scholar] [CrossRef]
- Li, D.; Yin, W.; Wong, W.E.; Jian, M.; Chau, M. Quality-oriented hybrid path planning based on a* and q-learning for unmanned aerial vehicle. IEEE Access 2021, 10, 7664–7674. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Algorithms based on branch and bound for the flying sidekick traveling salesman problem. Omega-Int. J. Manage. Sci. 2021, 104, 102493. [Google Scholar] [CrossRef]
- Dienstknecht, M.; Boysen, N.; Briskorn, D. The traveling salesman problem with drone resupply. OR Spectr. 2022, 44, 1045–1086. [Google Scholar] [CrossRef]
- Pina-Pardo, J.C.; Silva, D.F.; Smith, A.E. The traveling salesman problem with release dates and drone resupply. Comput. Oper. Res. 2020, 129, 105170. [Google Scholar] [CrossRef]
- Puerto, J.; Valverde, C. Routing for unmanned aerial vehicles: Touring dimensional sets. Eur. J. Oper. Res. 2022, 298, 118–136. [Google Scholar] [CrossRef]
- Saleu, R.G.M.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. The parallel drone scheduling problem with multiple drones and vehicles. Eur. J. Oper. Res. 2022, 300, 571–589. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. A branch-and-cut algorithm for the vehicle routing problem with drones. Transp. Res. Pt. B-Methodol. 2021, 144, 174–203. [Google Scholar] [CrossRef]
- Kundu, A.; Escobar, R.G.; Matis, T.I. An efficient routing heuristic for a drone-assisted delivery problem. IMA J. Manag. Math. 2022, 33, 583–601. [Google Scholar] [CrossRef]
- Kang, M.; Lee, C. An exact algorithm for heterogeneous drone-truck routing problem. Transp. Sci. 2021, 55, 1088–1112. [Google Scholar] [CrossRef]
- Chen, C.; Demir, E.; Huang, Y. An adaptive large neighborhood search heuristic for the vehicle routing problem with time windows and delivery robots. Eur. J. Oper. Res. 2021, 294, 1164–1180. [Google Scholar] [CrossRef]
- Xia, Y.; Zeng, W.; Xing, X.; Zhan, Y.; Kumar, A. Joint optimisation of drone routing and battery wear for sustainable supply chain development: A mixed-integer programming model based on blockchain-enabled fleet sharing. Ann. Oper. Res. 2021, 1–39. [Google Scholar] [CrossRef]
- Das, D.N.; Sewani, R.; Wang, J.; Tiwari, M.K. Synchronized truck and drone routing in package delivery logistics. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5772–5782. [Google Scholar] [CrossRef]
- Masone, A.; Poikonen, S.; Golden, B.L. The multivisit drone routing problem with edge launches: An iterative approach with discrete and continuous improvements. Networks 2022, 80, 193–216. [Google Scholar] [CrossRef]
- Kuo, R.J.; Lu, S.H.; Lai, P.Y.; Mara, S.T.W. Vehicle Routing Problem with Drones Considering Time Windows. Expert Syst. Appl. 2022, 191, 116264. [Google Scholar] [CrossRef]
- Leon-Blanco, J.M.; Gonzalez-R, P.L.; Andrade-Pineda, J.L.; Canca, D.; Calle, M. A multi-agent approach to the truck multi-drone routing problem. Expert Syst. Appl. 2022, 195, 116604. [Google Scholar] [CrossRef]
- Lu, Y.; Yang, C.; Yang, J. A multi-objective humanitarian pickup and delivery vehicle routing problem with drones. Ann. Oper. Res. 2022. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative truck multi-drone routing and scheduling problem: Package delivery with flexible launch and recovery sites. Transp. Res. Pt. e-Logist. Transp. Rev. 2022, 164, 102788. [Google Scholar] [CrossRef]
- Lemardelé, C.; Estrada, M.; Pagès, L.; Bachofner, M. Potentialities of drones and ground autonomous delivery devices for last-mile logistics. Transp. Res. Pt. e-Logist. Transp. Rev. 2021, 149, 102325. [Google Scholar] [CrossRef]
- Di Puglia Pugliese, L.; Guerriero, F.; Scutellá, M.G. The last-mile delivery process with trucks and drones under uncertain energy consumption. J. Optim. Theory Appl 2021, 191, 31–67. [Google Scholar] [CrossRef]
- Eun, J.; Song, B.D.; Lee, S.; Lim, D.E. Mathematical investigation on the sustainability of UAV logistics. Sustainability 2019, 11, 5932. [Google Scholar] [CrossRef]
- Bruni, M.E.; Khodaparasti, S. A Variable Neighborhood Descent Matheuristic for the Drone Routing Problem with Beehives Sharing. Sustainability 2022, 14, 9978. [Google Scholar] [CrossRef]
- Holzmann, P.; Wankmüller, C.; Globocnik, D.; Schwarz, E.J. Drones to the rescue? exploring rescue workers’ behavioral intention to adopt drones in mountain rescue missions. Int. J. Phys. Distrib. Logist. Manag. 2021, 51, 381–402. [Google Scholar] [CrossRef]
- Zhang, G.; Zhu, N.; Ma, S.; Xia, J. Humanitarian relief network assessment using collaborative truck-and-drone system. Transp. Res. Pt. e-Logist. Transp. Rev. 2021, 152, 102417. [Google Scholar] [CrossRef]
- Ghelichi, Z.; Gentili, M.; Mirchandani, P.B. Logistics for a fleet of drones for medical item delivery: A case study for louisville, ky. Comput. Oper. Res. 2021, 135, 105443. [Google Scholar] [CrossRef]
- Jeelani, I.; Gheisari, M. Safety challenges of uav integration in construction: Conceptual analysis and future research roadmap. Saf. Sci. 2021, 144, 105473. [Google Scholar] [CrossRef]
- Kunovjanek, M.; Wankmüller, C. Containing the COVID-19 pandemic with drones-feasibility of a drone enabled back-up transport system. Transp. Policy 2021, 106, 141–153. [Google Scholar] [CrossRef]
- Banik, D.; Hossain, N.U.I.; Govindan, K.; Nur, F.; Babski-Reeves, K. A decision support model for selecting unmanned aerial vehicle for medical supplies: Context of COVID-19 pandemic. Int. J. Logist. Manag. 2022. [Google Scholar] [CrossRef]
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The Use of Drones for Last-Mile Delivery: A Numerical Case Study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- Di Puglia Pugliese, L.; Macrina, G.; Guerriero, F. Trucks and drones cooperation in the last-mile delivery process. Networks 2021, 78, 371–399. [Google Scholar] [CrossRef]
- Merkert, R.; Bliemer, M.C.J.; Fayyaz, M. Consumer preferences for innovative and traditional last-mile parcel delivery. Int. J. Phys. Distrib. Logist. Manag. 2022, 52, 261–284. [Google Scholar] [CrossRef]
- Demir, E.; Syntetos, A.; van Woensel, T. Last mile logistics: Research trends and needs. IMA J. Manag. Math. 2022, 33, 549–561. [Google Scholar] [CrossRef]
- Li, X.; Gong, L.; Liu, X.; Jiang, F.; Shi, W.; Fan, L.; Xu, J. Solving the last mile problem in logistics: A mobile edge computing and blockchain-based unmanned aerial vehicle delivery system. Concurr. Comput.-Pract. Exp. 2022, 34, e6068. [Google Scholar] [CrossRef]
- Munawar, H.S.; Inam, H.; Ullah, F.; Qayyum, S.; Kouzani, A.Z.; Mahmud, M.P. Towards smart healthcare: Uav-based optimized path planning for delivering COVID-19 self-testing kits using cutting edge technologies. Sustainability 2021, 13, 10426. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist.-Res. Appl. 2021, 24, 531–550. [Google Scholar] [CrossRef]
- Kamat, A.; Shanker, S.; Barve, A.; Muduli, K.; Mangla, S.K.; Luthra, S. Uncovering interrelationships between barriers to unmanned aerial vehicles in humanitarian logistics. Oper. Manag. Res. 2022, 1–27. [Google Scholar] [CrossRef]
- Hazama, Y.; Iima, H.; Karuno, Y.; Mishima, K. Genetic algorithm for scheduling of parcel delivery by drones. Adv. Mech. Des. Syst. Manuf. 2021, 15, JAMDSM0069. [Google Scholar] [CrossRef]
- Wang, K.; Pesch, E.; Kress, D.; Fridman, I.; Boysen, N. The piggyback transportation problem: Transporting drones launched from a flying warehouse. Eur. J. Oper. Res. 2021, 296, 504–519. [Google Scholar] [CrossRef]
- Pei, Z.; Dai, X.; Yuan, Y.; Du, R.; Liu, C. Managing price and fleet size for courier service with shared drones. Omega-Int. J. Manage. Sci. 2021, 104, 102482. [Google Scholar] [CrossRef]
- Shen, Y.; Xu, X.; Zou, B.; Wang, H. Operating policies in multi-warehouse drone delivery systems. Int. J. Prod. Res. 2021, 59, 2140–2156. [Google Scholar] [CrossRef]
- Coindreau, M.A.; Gallay, O.; Zufferey, N. Parcel delivery cost minimization with time window constraints using trucks and drones. Networks 2021, 78, 400–420. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Siew, T.P.; Wang, P.; Nutanong, S. Shipper cooperation in stochastic drone delivery: A dynamic bayesian game approach. IEEE Trans. Veh. Technol. 2021, 70, 7437–7452. [Google Scholar] [CrossRef]
- Campbell, J.F.; Corberán, Á.; Plana, I.; Sanchis, J.M.; Segura, P. Solving the length constrained k-drones rural postman problem. Eur. J. Oper. Res. 2021, 292, 60–72. [Google Scholar] [CrossRef]
- Radzki, G.; Nielsen, I.; Golińska-Dawson, P.; Bocewicz, G.; Banaszak, Z. Reactive UAV fleet’s mission planning in highly dynamic and unpredictable environments. Sustainability 2021, 13, 5228. [Google Scholar] [CrossRef]
- Li, S.; Zhang, H.; Li, Z.; Liu, H. An Air Route Network Planning Model of Logistics UAV Terminal Distribution in Urban Low Altitude Airspace. Sustainability 2021, 13, 13079. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Reference | Main Topic | Theoretical Models | Application Scenarios | The Year of the Reviewed Literature |
|---|---|---|---|---|
| [2] | This paper researches literature in Elsevier, Wiley, Springer, Scopus, ResearchGate and Google Scholar databases, with a focus on UAV path planning from the perspective of operations research in the context of package delivery. | √ | 2006–2020 | |
| [3] | This paper investigates the established and novel concept of last-mile delivery, emphasizing the decision-making problems to be solved when establishing and operating the concept and summarizing the operational research methods to solve these problems. | √ | 2000–2020 | |
| [4] | This paper researches various optimization problems (mathematical models, solution methods, etc.) and implementation obstacles in the application of UAVs and UAV-truck cooperation. | √ | 2001–2020 | |
| [5] | This paper classifies delivery systems for UAVs and their associated path planning problems. | √ | 2001–2021 | |
| [6] | This paper researches the path planning problem of two-echelon networks with the modeling mechanism of connecting two echelons. | √ | 2000–2021 | |
| [7] | This paper classifies the UAVs routing problem and reviews and describes the popular algorithms widely used in the existing literature. | √ | 2001–2022 | |
| This paper | This present paper reviews research on the application of UAVs in logistics, including theoretical models (the traveling salesman problems and other path planning problems), application scenarios (safety applications and last-mile delivery problems) and other problems (UAV implementation obstacles, costs, pricing, etc.). | √ | √ | 2021–2022 |
| Exclusion Criteria | Judgment Method | |
|---|---|---|
| 1 | The literature is not about the application of UAVs in logistics (digital technology application, robot application in logistics, UAVs application in other fields, UAVs technology development, communication optimization, etc.) | Reading the title, abstract and keywords of the literature |
| 2 | Journal of automation and mathematics, etc. | Reading the journals |
| 3 | Other application themes (agriculture, forestry, electricity, meteorology, etc.) | Reading abstract |
| The Journals Used in the Literature Review | Article Number |
|---|---|
| European Journal of Operational Research | 5 |
| Transportation Research Part E: Logistics and Transportation Review | 4 |
| Networks | 3 |
| International Journal of Physical Distribution Logistics Management | 2 |
| Omega-International Journal of Management Science | 2 |
| Annals of Operations Research | 2 |
| Computers Operations Research | 2 |
| Ima Journal of Management Mathematics | 2 |
| Expert Systems with Applications | 2 |
| IEEE Transactions on Intelligent Transportation Systems | 1 |
| Safety Science | 1 |
| International Journal of Logistics Management | 1 |
| Journal of Optimization Theory and Applications | 1 |
| International Journal of Logistics-Research and Applications | 1 |
| IEEE Transactions on Vehicular Technology | 1 |
| Transportation Science | 1 |
| International Journal of Production Research | 1 |
| Transport Policy | 1 |
| Operations Management Research | 1 |
| Journal of Advanced Mechanical Design Systems and Manufacturing | 1 |
| Or Spectrum | 1 |
| Reference | Restrictions | Objective Function | Approach | Conclusion |
|---|---|---|---|---|
| [9] | Time window | Minimize the completion time | Branch and bound algorithm, heuristic algorithm | The heuristic algorithm is able to provide state-of-the-art results for medium/large instances. |
| [10] | Truck passenger capacity | Minimize the completion time | Dynamic programming (DP) | UAV’s resupply can greatly improve delivery performance. |
| [11] | Time window, UAVs speed and capacity | Minimize the completion time | Mixed integer linear programming | The use of UAVs for resupply can reduce total delivery time by up to 20%. |
| [12] | UAVs access factors | Minimize cost | Two families of mathematical programming formulations. | Two families of mathematical programming formulations can solve optimization and other combination problems |
| [13] | The return flight path of UAVs | Minimize the completion time | Mixed meta-heuristic algorithm | The partitioning between vehicles and UAVs would easily be managed, but the completion time objective would certainly be more challenging. |
| Reference | Restrictions | Objective Function | Approach | Conclusion |
|---|---|---|---|---|
| [14] | Time window | Delivery speed and workload | Mixed integer linear programming (MILP) model, branch and cut algorithm | Integrating truck-UAV tandems into transportation systems not only can lead to improvements regarding the speed of deliveries but also can be used to reduce the fleet size without slowing down the delivery process and increasing the workload of truck drivers. |
| [15] | - | Minimize the completion time | Split algorithm and shortest path method | The algorithm based on the logic-based Benders decomposition approach, which outperforms the state-of-the-art solvers. |
| [16] | Speed, battery capacity | Minimize the truck path and the waiting time for the return of the UAVs after delivery. | Mixed integer programming formula, the benders decomposition method | Benders decomposition method based on logic has better performance than Cplex. |
| [17] | Time window | Minimize the completion time | An adaptive large neighborhood search heuristic algorithm | Adaptive large neighborhood search heuristic algorithm can effectively improve the performance of the VRPTWDR problem. |
| [18] | Vehicles capacity limit, UAVs battery endurance | Find the shortest path and minimize the completion time | Mixed integer programming model, branch and price algorithm | The exact branch-and-price algorithm was developed. Instances of up to 100 customers can be solved optimally by the proposed algorithm. |
| [19] | Time window | Minimize costs and maximize customer service levels in terms of timely delivery. | Pareto Ant Colony Optimization Algorithm | The collaborative Pareto Ant Colony Optimization algorithm is an efficient solution for parcel delivery. |
| [20] | Time window, battery life | Minimize the completion time | Global continuous method | The ability to launch along an edge has a nontrivial impact on objective values on truck-and-UAV coordination problems. |
| [21] | Time window | Minimize costs | Mixed integer programming (MIP) model, variable neighborhood search (VNS) program | The variable neighborhood search (VNS) program can effectively solve the UAVs vehicle routing problem (VRPTWD). |
| [22] | UAVs battery capacity, number of trucks and routes | Minimize the completion time | Iterative greedy algorithm | Agents represent the points that are going to be visited by vehicles. The agent-based system can solve complex optimization problems with high quality. |
| [23] | Flight range and carrying capacity | Minimize time and maximize the minimum satisfaction rate of demand nodes | Specialized Local Search Operator (HMOEAS) and Ant Colony Algorithm (HACO) | HMOEAS has more advantages than other methods in terms of distribution efficiency of epidemic-resistant materials. |
| [24] | Routes and Sites | Minimize the completion time | Mixed Integer Linear Programming Model, Mixed Simulated Annealing | Contrary to existing methods of limiting truck parking locations, the use of flexible sites can greatly improve delivery efficiency. |
| [25] | - | Minimize costs | Continuous approximation (CA) analysis. | In dense streets, ground autonomous delivery devices have more economic benefits than traditional methods. |
| [26] | Time window, energy limit | Minimize costs | Benders Combined Cutting Decomposition Method | The algorithm can effectively solve quality problems in terms of cost and energy consumption. |
| Reference | Restrictions | Objective Function | Approach | Conclusion |
|---|---|---|---|---|
| [29] | - | Personal attitude, perception | Moderated ordinary least squares (OLS) | The behavioral intention to use UAVs in mountain rescue missions is driven by the expected performance gains. |
| [30] | Scheduled time limit | Minimize the total route | Mixed integer linear programming (MILP) model | This algorithm can obtain high-quality solutions with a less than 10% optimization gap for all terminal instances within the predefined time limit. |
| [31] | Time window | Minimize the completion time | Slot travel scheduling formula | The more UAVs are allowed, the more the system performance depends on the number of charging stations. |
| [32] | - | Minimize the completion time | - | The noise of UAVs or the presence of UAVs in the working environment may distract workers. |
| [33] | Weather conditions | - | Mathematical time and cost model | UAVs provide flexible and fast delivery services to deal with powerful disasters. |
| [34] | Carrying capacity | Select the best UAVs for specific scenarios | matrix approach (GTMA) | UAVs equipped with payload handling capacity flexibility get more preference in urban regions than in other areas. |
| Reference | Restrictions | Objective Function | Approach | Conclusion |
|---|---|---|---|---|
| [36] | Time window | Minimum cost | Mixed integer linear program | Two UAVs associated with each truck are the best option. Indeed, using three UAVs per truck does not lead to a further reduction in transportation cost. |
| [37] | - | - | A survey involving stated choice experiments | People prefer traditional postal delivery over UAV delivery, all else equal, but UAV deliveries become competitive with large market shares if they live up to the premise that they can deliver faster and cheaper. |
| [38] | Capacity, speed | - | The variable domain search algorithm | Customers prefer to have on-time delivery; there is a need for more research focusing on operational and tactical issues related to routing. |
| Reference | Restrictions | Objective Function | Approach | Conclusion |
|---|---|---|---|---|
| [41] | - | - | Fuzzy Delphi Method (FDM), Analytic Hierarchy Process (AHP) | Regulations and threats to privacy and security are the most critical barriers to the implementation of UAVs in the logistics sector. |
| [43] | Fixed route and travel time of truck | Minimize the completion time | Genetic algorithm (GA) | The proposed GA can successfully find an optimal or near-optimal solution faster than an integer programming solver for almost all instances. |
| [45] | Weather conditions, takeoff/landing time, etc. | Maximize profits | Time-varying and price-sensitive queuing model | The proposed approximation methods not only provide a high-quality joint strategy but also help stabilize the system’s performance. |
| [46] | Distribution principle | Minimize costs | A neighborhood search algorithm, approximate mean method and heuristic algorithm | When the number of UAVs is not large, and the heuristic can improve the throughput capacity by about 13.31%. |
| [47] | Time window | Minimize costs | Mixed integer linear programming formula, adaptive large neighborhood search | Truck-and-UAV solutions can reduce costs by up to 34% compared to traditional truck-only delivery. |
| [48] | Flight distance, limited time | Minimize costs | Bayesian Shipper Cooperation in Stochastic UAVs Delivery (BCoSDD) framework | This framework can help the shippers plan and schedule their UAV delivery effectively. |
| [49] | Limit of maximum distance | Minimize costs | Branch cutting algorithm, heuristic algorithm | When the percentage of clients reachable by UAVs is above 50%, expenses related to fuel consumption can be reduced by at least 15%. |
| [44] | Weight and size | Minimize completion time | Meta heuristic algorithm, integer programming, greedy algorithm, polynomial algorithm | The authors prove several important properties of our piggyback transportation problem, such as the complexity status, efficient solution algorithms for restricted problem settings and a polynomial-time approximation scheme for the problem. |
| [42] | - | Graph theory and matrix approach (GTMA) and PERMAN algorithm | Developed and developing countries must first improve their inadequate government regulations regarding humanitarian UAVs. |
| Research Theme | Theoretical Perspective | Approach | |
|---|---|---|---|
| Research status | The topic of path research on UAVs is quite varied and the algorithms used are abundant; whether for the traveling salesman problem or the last-mile delivery problem, almost all the relevant literature deals with path optimization to maximize cost savings, with less literature focusing on human–machine interaction, implementation barriers, benefits/costs, etc. | Research on single/multiple UAVs or trucks jointly completing delivery tasks under the constraints of multiple factors such as UAVs endurance and carrying capacity, so as to achieve the goal of saving time and economic costs. | Most of the studies use mathematical models and formulas such as mixed integer linear programming to study the UAV delivery problem under the time window restriction. |
| Research deficiencies | Most of the current research models are designed for applications in e-commerce and healthcare/emergency services. Other applications, such as food and mail delivery, remain underrepresented in academic discussions. | The literature also lacks comprehensive research on the comprehensive design and operation planning of these delivery modes, and the research on performance comparison of logistics models based on UAVs is also lacking. | The literature research method may omit some literature. |
| Future research directions | UAVs application planning can further consider different operation scenarios (altitude, wind speed, temperature, humidity, etc.), and conduct research on specific flight environments, combinations of different algorithms, multiple UAVs planning, etc. UAV delivery under dynamic orders can also be studied. | For the use of UAVs in logistics, the contribution and impact of the process of pursuing carbon neutrality can be considered, as well as the use of UAVs in green logistics and green supply chains. | It is possible to improve the accuracy rate and the practical feasibility of experiments when using relevant research methods. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Liu, M.; Jiang, D. Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability 2022, 14, 14473. https://doi.org/10.3390/su142114473
Li Y, Liu M, Jiang D. Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability. 2022; 14(21):14473. https://doi.org/10.3390/su142114473
Chicago/Turabian StyleLi, Yi, Min Liu, and Dandan Jiang. 2022. "Application of Unmanned Aerial Vehicles in Logistics: A Literature Review" Sustainability 14, no. 21: 14473. https://doi.org/10.3390/su142114473
APA StyleLi, Y., Liu, M., & Jiang, D. (2022). Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability, 14(21), 14473. https://doi.org/10.3390/su142114473