
Encouraging the Sustainable Adoption of Autonomous Vehicles for Public Transport in Belgium: Citizen Acceptance, Business Models, and Policy Aspects


Abstract
:1. Introduction
2. Potential Benefits and Adverse Effects of Autonomous Vehicles
2.1. Potential Benefits
2.2. Potential Adverse Effects
3. Challenges to the Adoption of Autonomous Vehicles
3.1. Service and Cost Characteristics
3.2. Safety Aspects
3.3. Individual Factors
3.4. Business Ecosystems
4. Materials and Methods
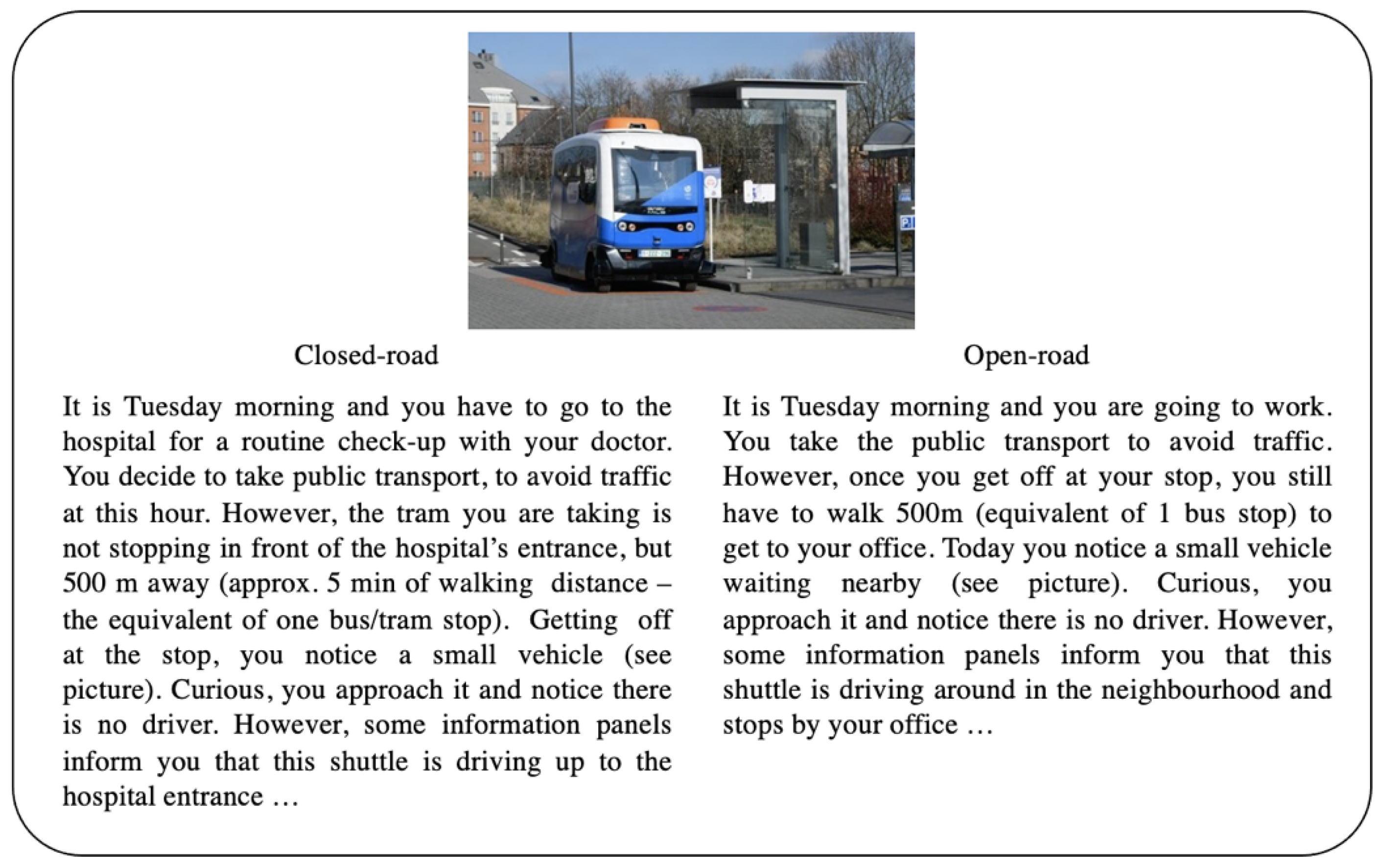
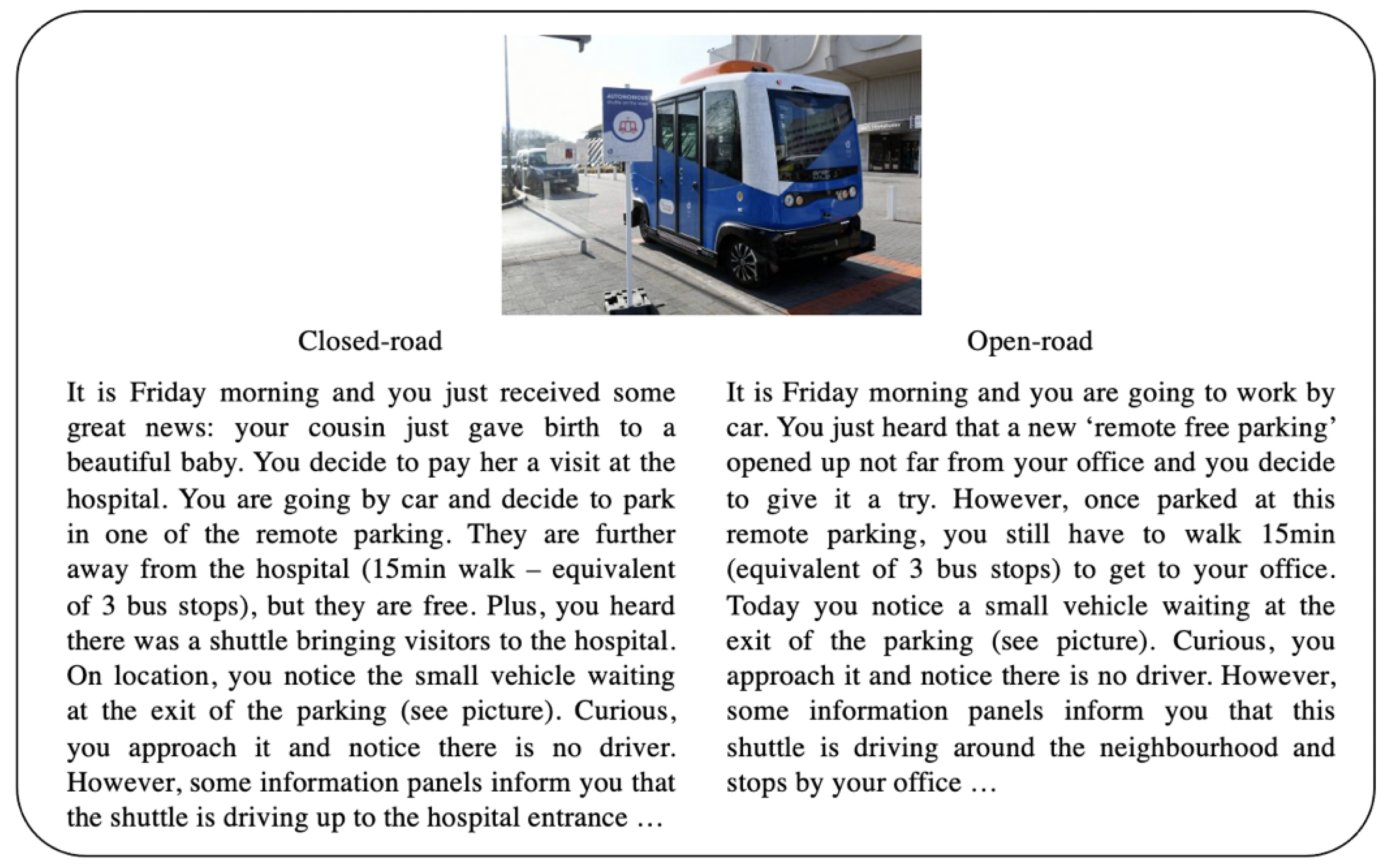
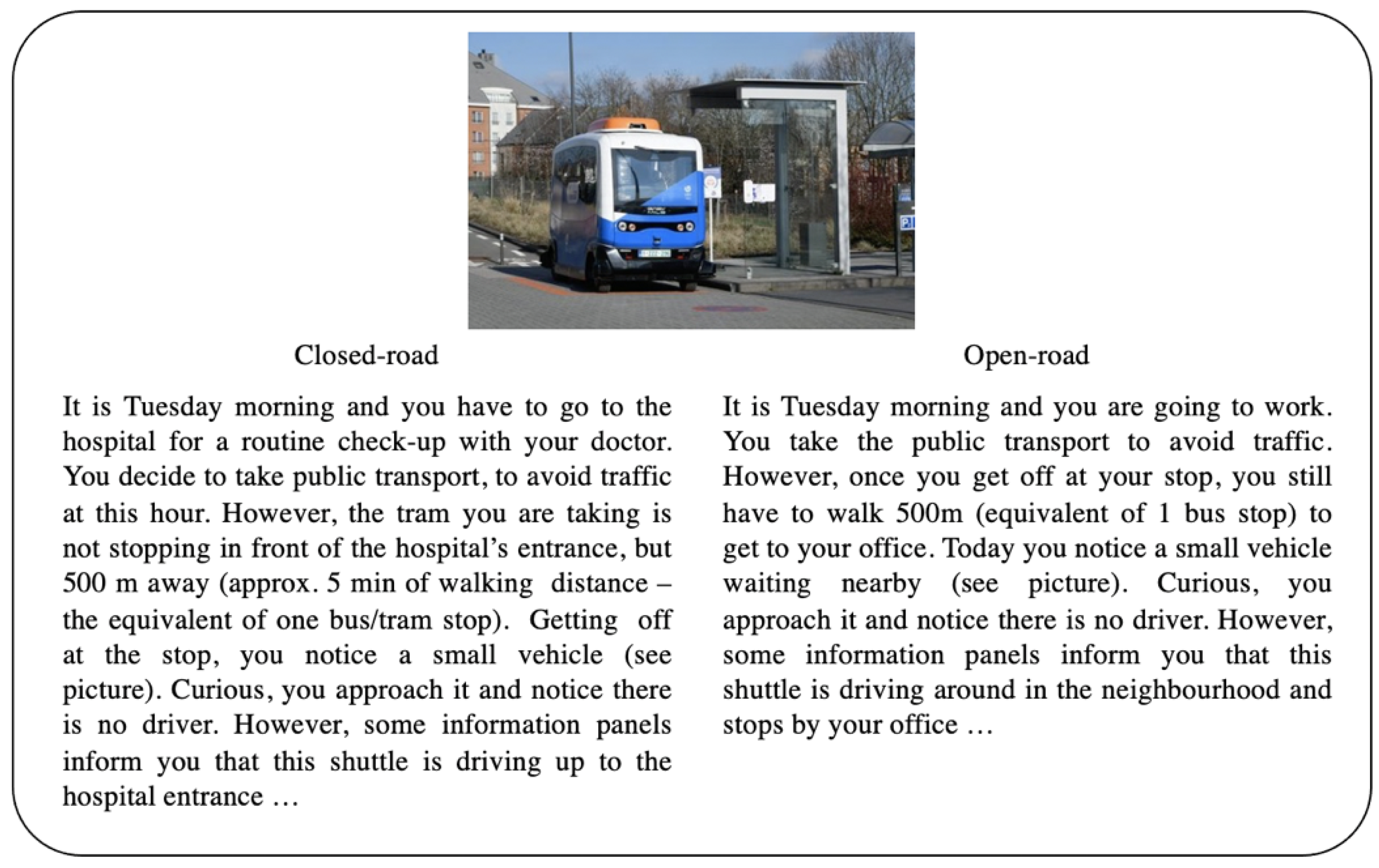
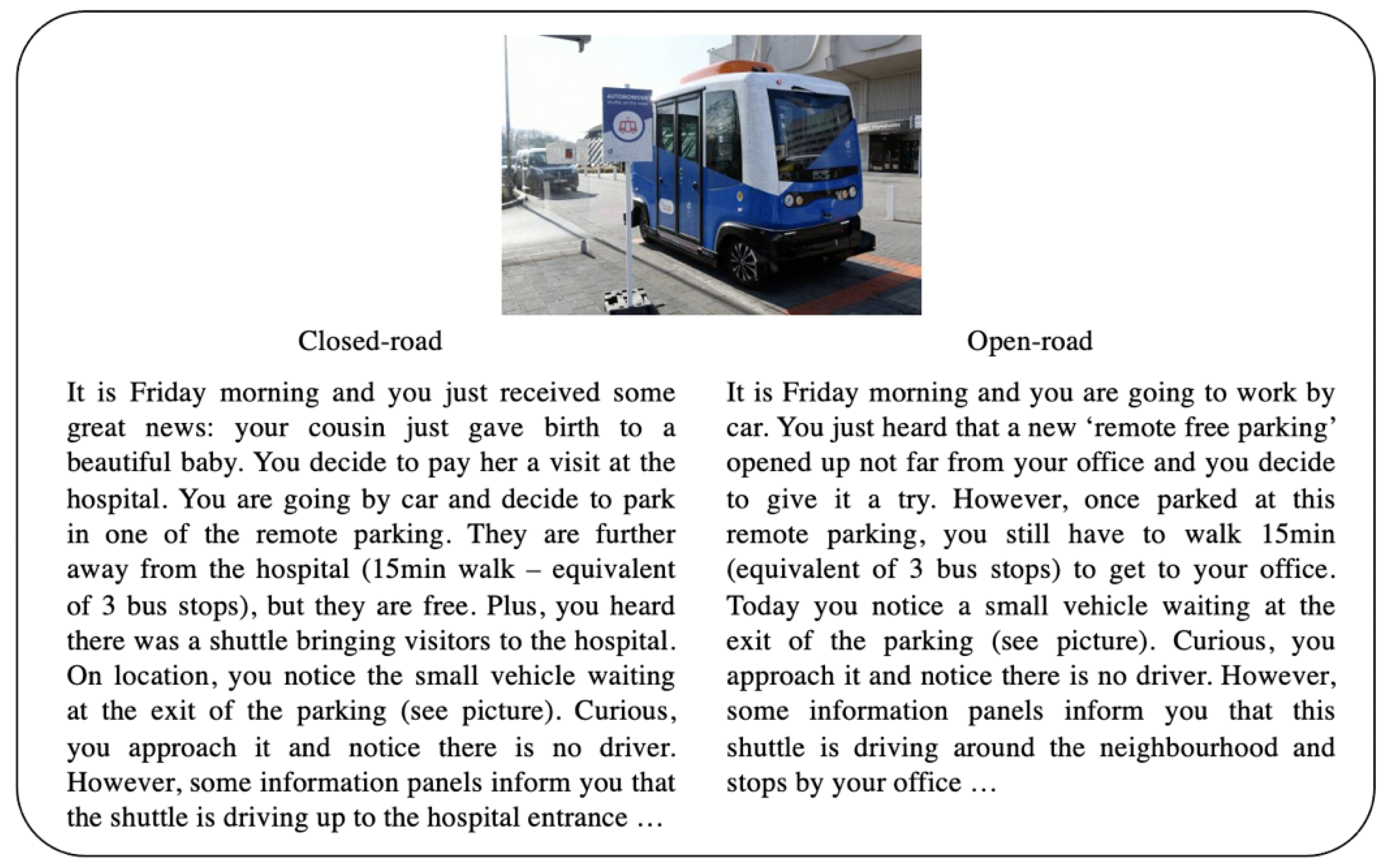
4.1. Survey
4.2. Expert Interviews
5. Results
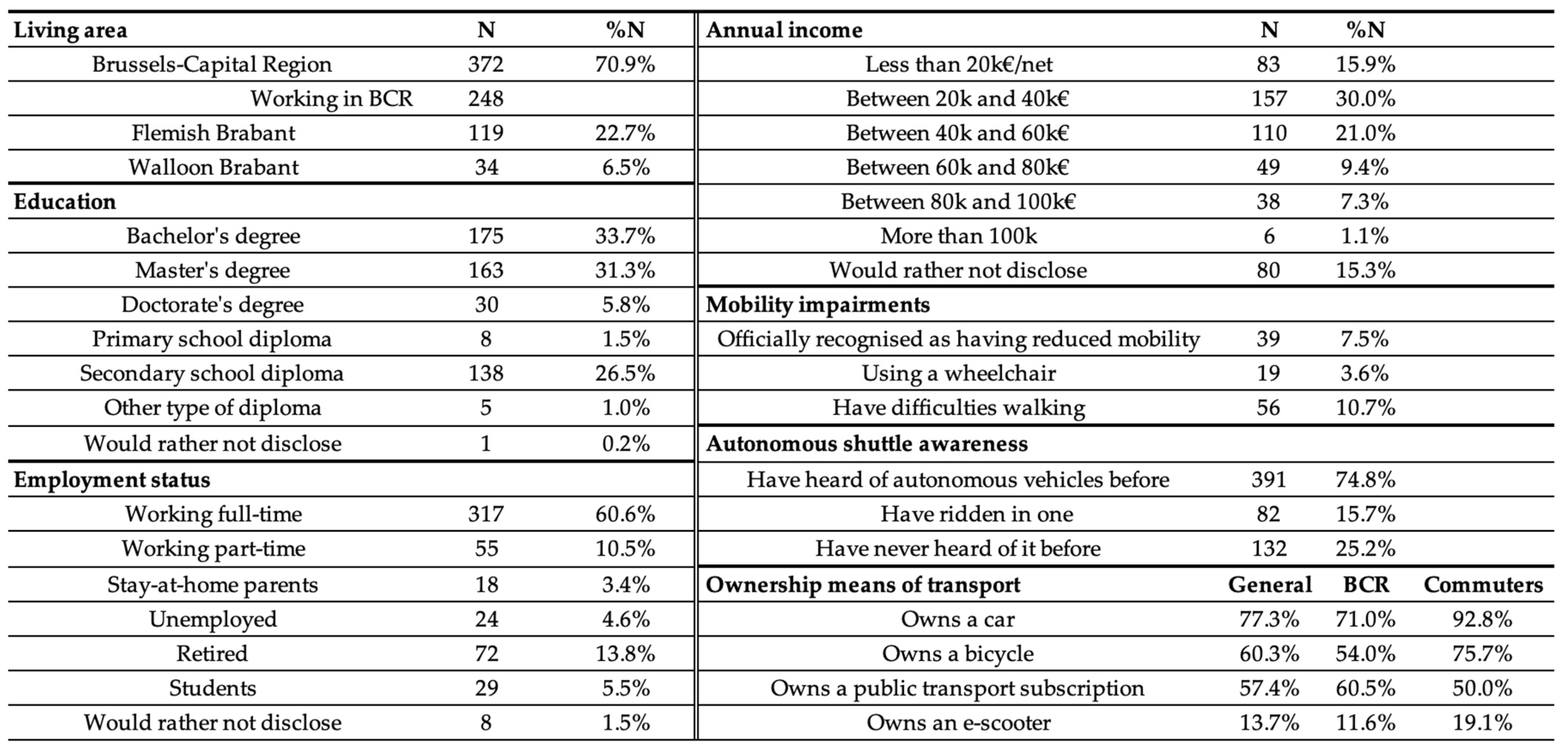
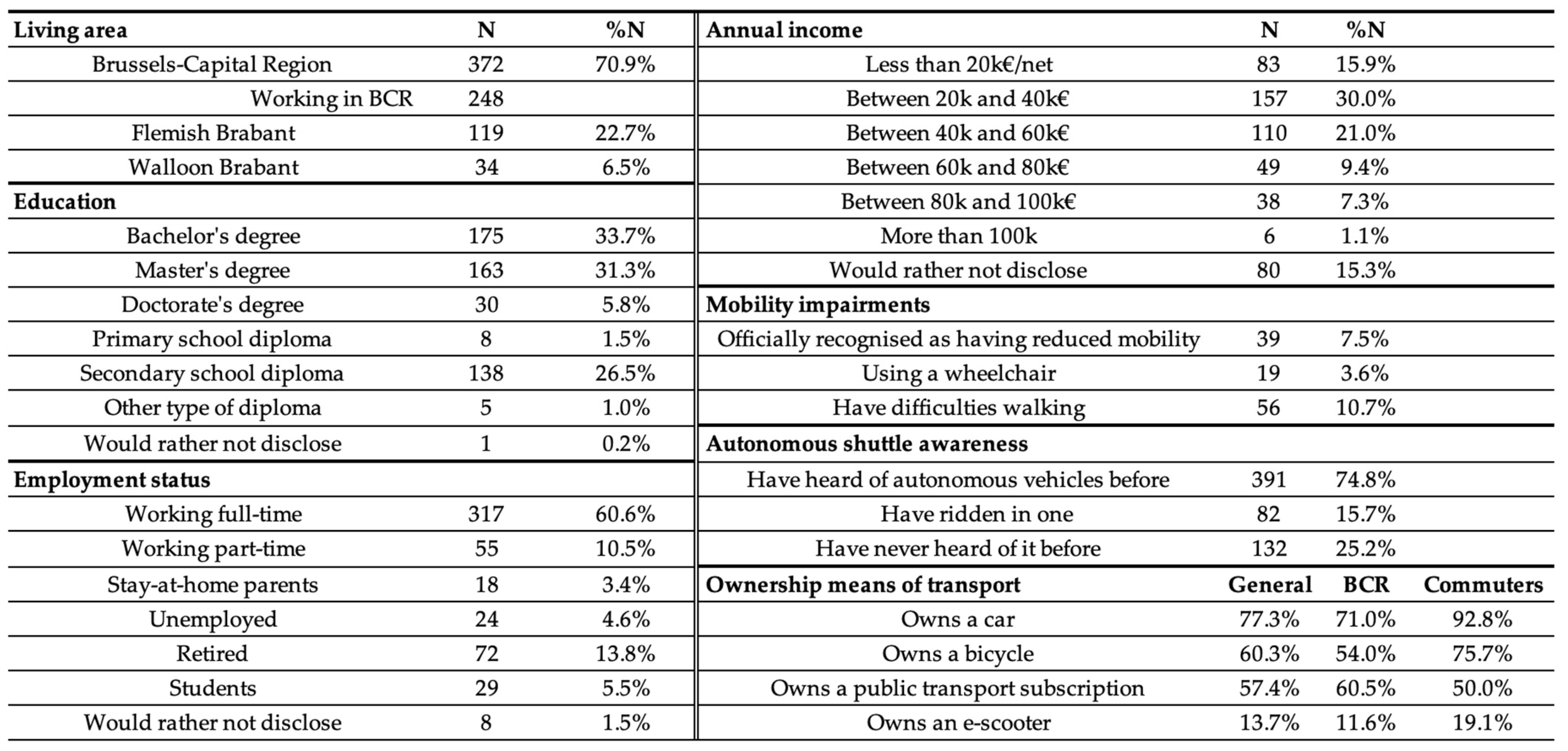
5.1. Survey Findings
5.2. Insights from Interviews
- Public authorities. While they are involved in funding, tests, and regulatory initiatives, they recognize the need to design an aligned long-term vision or action plan for CCAM, with a clear idea of the desired future to strive toward. Moreover, being actively involved in the ecosystem from an early stage is seen as important in influencing the transition towards AVs and their outcome, making sure the deployed solutions favor sustainable mobility patterns and avoid adverse consequences. On a general level, it was noted that for autonomous shuttle projects, in Belgium or elsewhere, the involvement of city and regional authorities is key, as well as the support from national or federal governments.
- (Autonomous) vehicle manufacturers. Leading automakers could integrate the different elements in the value chain since the role of a full integrator is missing. In addition, there is the challenge of convincing international market leaders to collaborate on AV tests in the region.
- Public transport operators (PTOs). Optimally, they should be involved in further road tests and coordinate more between themselves and with other stakeholders to share the insights from ongoing pilots in a more structured way.
- Research institutions and users. Universities are seen as responsible for performing the tasks of generating knowledge regarding societal impact, doing or supporting tests, and generating acceptance among users, for example, via living labs where the user participates in the testing.
6. Discussion
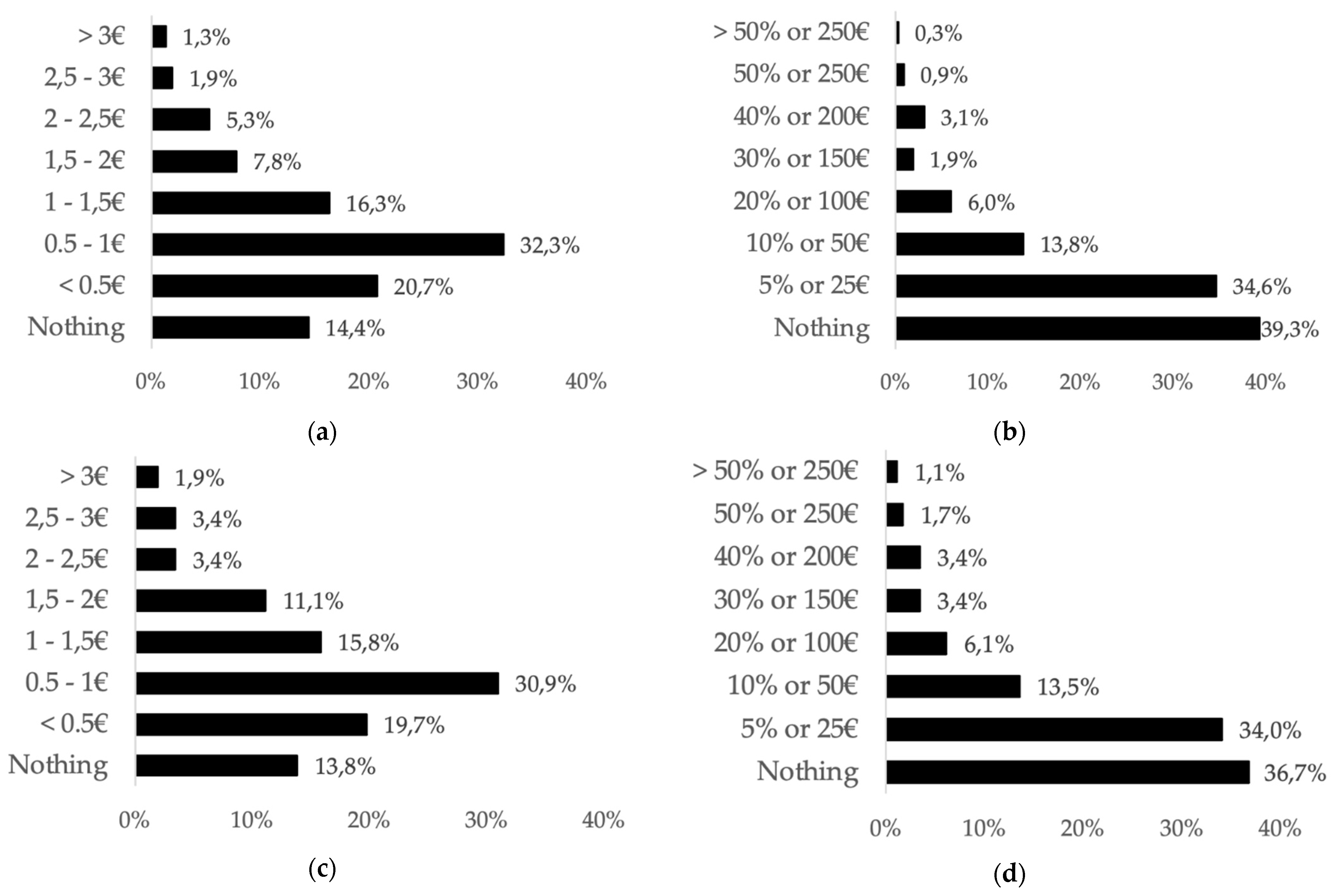
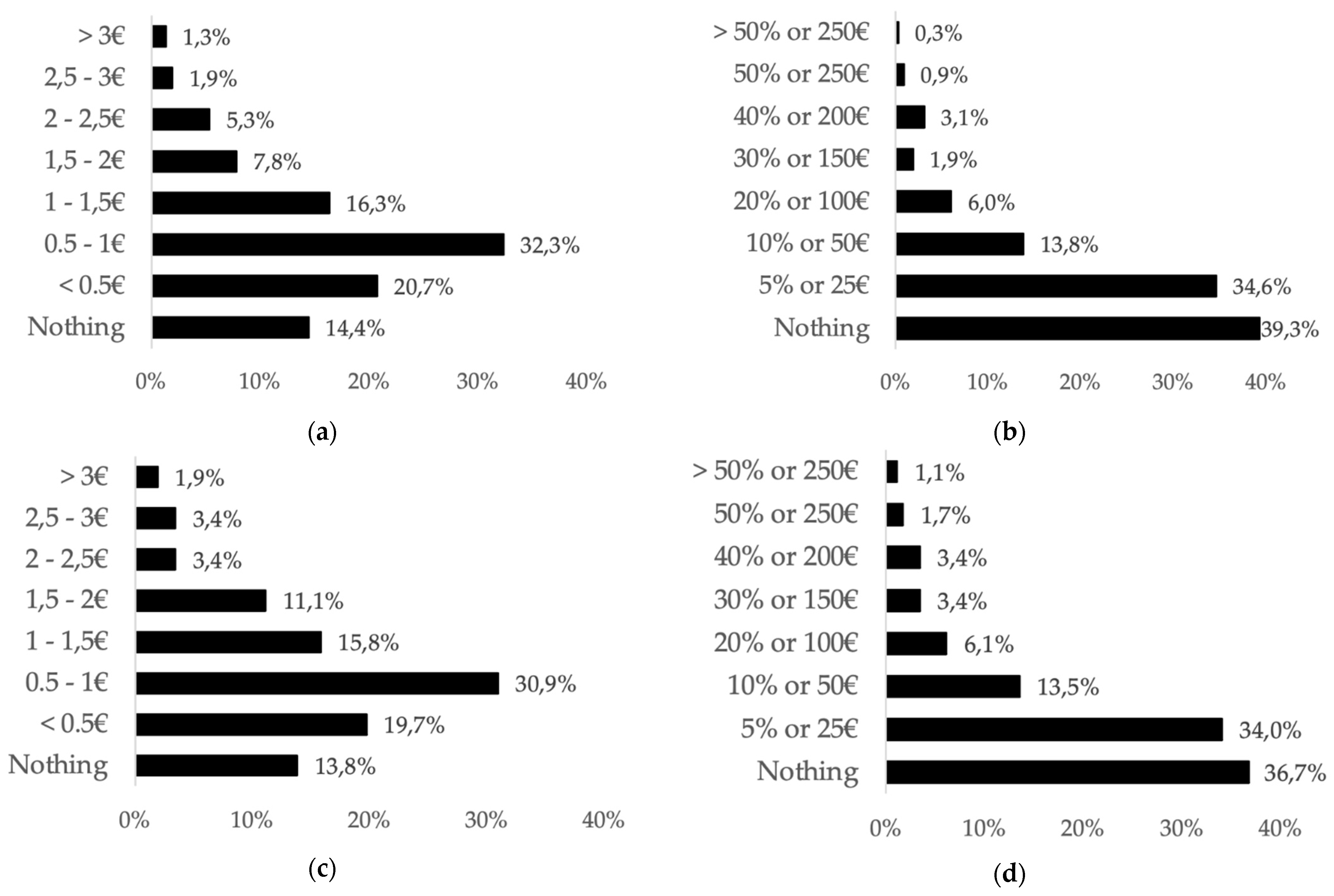
6.1. User Acceptance and Willingness to Pay
6.2. Business Model Analysis
- Regarding deployment of AV shuttles, manufacturers and local shuttle leasing providers could not only supply the technology to PTOs but also cooperate with them for deployment. In the likely case of PTOs owning the AV fleets, the provision of other value chain services related to fleet management—including the remote driving of vehicles to a depot or the cleaning and overall maintenance of the vehicles—could either be performed by the PTO itself or by a third party service provider.
- For other services (e.g., car sharing), it could be that the MaaS platform facilitates match-making between the vehicles of third-party owners (e.g., automakers or current mobility service providers) and potential passengers, or that it just enables the discovery of third-party AV services. Similarly, the billing may be performed by a third party such as a financial services provider, enabling payment for a private mobility service through the app via an API.
6.3. Policy Recommendations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Commission. Saving Lives: Boosting car safety in the EU. Report from the Commission to the European Parliament and the Council. 2016. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A52016DC0787 (accessed on 14 December 2021).
- INRIX. INRIX 2021 Global Traffic Scorecard, Inrix. Available online: https://inrix.com/scorecard/ (accessed on 17 December 2021).
- TomTom. Brussels Traffic Report | TomTom Traffic Index. Available online: https://www.tomtom.com/en_gb/traffic-index/brussels-traffic/ (accessed on 17 December 2021).
- MORA. Mobiliteitsverslag 2018. Mobility as a Service: Het Hinterlandvervoer en de Bereikbaarheid van de Economische Poorten. 2018. Available online: https://www.mobiliteitsraad.be/mora/publicatie/mobiliteitsverslag-2018 (accessed on 14 December 2021).
- WHO. Global Status Report on Road Safety 2018, France. 2018. Available online: https://www.who.int/publications-detail-redirect/9789241565684 (accessed on 14 December 2021).
- UNECE. Statistics of Road Traffic Accidents in Europe and North America; UN: New York, NY, USA, 2019; Volume LV. [Google Scholar] [CrossRef]
- Rayle, L.; Dai, D.; Chan, N.; Cervero, R.; Shaheen, S. Just a better taxi? A survey-based comparison of taxis, transit, and ridesourcing services in San Francisco. Transp. Policy 2016, 45, 168–178. [Google Scholar] [CrossRef] [Green Version]
- Castiglione, J.; Chang, T.; Cooper, D.; Hobson, J.; Logan, W.; Young, E.; Charlton, B.; Wilson, C.; Mislove, A.; Chen, L.; et al. TNCs today: A profile of San Francisco transportation network company activity. San Franc. Cty. Transp. Auth. June 2016, 2017, 21. [Google Scholar]
- OECD. Urban Mobility System Upgrade: How Shared Self-Driving Cars Could Change City Traffic, Paris, France. 2015. Available online: https://doi.org/10.1787/5jlwvzdk29g5-en (accessed on 14 December 2021).
- SAE International. Surface Vehicle Recommended Practice J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018; Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 14 December 2021).
- Pol Camps-Aragó and Wim Vanobberghen. Policy Brief #46: Autonomous Vehicles in Urban Settings. Recommendations to Encourage Testing and Societally Beneficial Deployment. SMIT. 6 May 2021. Available online: https://smit.vub.ac.be/policy-brief-46-autonomous-vehicles-in-urban-settings-recommendations-to-encourage-testing-and-societally-beneficial-deployment (accessed on 15 December 2021).
- Derauw, S.; Gelaes, S.; Pauwels, C. Enquête Monitor over de mobiliteit van de Belgen; Federale Overheidsdienst Mobiliteit en Vervoer: Brussels, Belgium, 2019.
- Gandia, R.M.; Antonialli, F.; Cavazza, B.H.; Neto, A.M.; de Lima, D.A.; Sugano, J.Y.; Nicolai, I.; Zambalde, A.L. Autonomous vehicles: Scientometric and bibliometric review. Transp. Rev. 2019, 39, 9–28. [Google Scholar] [CrossRef]
- Faisal, A.; Yigitcanlar, T.; Kamruzzaman, M.; Paz, A. Mapping Two Decades of Autonomous Vehicle Research: A Systematic Scientometric Analysis. J. Urban Technol. 2021, 28, 45–74. [Google Scholar] [CrossRef]
- Brown, A.; Gonder, J.; Repac, B. An Analysis of Possible Energy Impacts of Automated Vehicles. In Road Vehicle Automation; Meyer, G., Beiker, S., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 137–153. [Google Scholar] [CrossRef]
- Spieser, K.; Treleaven, K.; Zhang, R.; Frazzoli, E.; Morton, D.; Pavone, M. Toward a Systematic Approach to the Design and Evaluation of Automated Mobility-on-Demand Systems: A Case Study in Singapore. In Road Vehicle Automation; Meyer, G., Beiker, S., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 229–245. [Google Scholar] [CrossRef] [Green Version]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Taiebat, M.; Brown, A.L.; Safford, H.R.; Qu, S.; Xu, M. A Review on Energy, Environmental, and Sustainability Implications of Connected and Automated Vehicles. Environ. Sci. Technol. 2018, 52, 11449–11465. [Google Scholar] [CrossRef] [PubMed]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles—Environmental impacts—A review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef]
- Hartmann, M.; Motamedidehkordi, N.; Krause, S.; Hoffmann, S.; Vortisch, P.; Busch, F. Impact of Automated Vehicles on Capacity of the German Freeway Network; ERTICO: Montreal, QC, Canada, 2017. [Google Scholar]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Change 2015, 5, 860–863. [Google Scholar] [CrossRef]
- Nunes, A.; Reimer, B.; Coughlin, J.F. People must retain control of autonomous vehicles. Nature 2018, 556, 169–171. [Google Scholar] [CrossRef] [Green Version]
- Ainsalu, J.; Arffman, V.; Bellone, M.; Ellner, M.; Haapamäki, T.; Haavisto, N.; Josefson, E.; Ismailogullari, A.; Lee, B.; Madland, O.; et al. State of the Art of Automated Buses. Sustainability 2018, 10, 3118. [Google Scholar] [CrossRef]
- Bischoff, J.; Maciejewski, M. Simulation of City-wide Replacement of Private Cars with Autonomous Taxis in Berlin. Procedia Comput. Sci. 2016, 83, 237–244. [Google Scholar] [CrossRef] [Green Version]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey. Traffic Saf. Facts Crash Stats 2015, 2, 1–2. [Google Scholar]
- Dingus, T.A.; Guo, F.; Lee, S.; Antin, J.F.; Perez, M.; Buchanan-King, M.; Hankey, J. Driver crash risk factors and prevalence evaluation using naturalistic driving data. Proc. Natl. Acad. Sci. USA 2016, 113, 2636–2641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wijnen, W.; Stipdonk, H. Social costs of road crashes: An international analysis. Accid. Anal. Prev. 2016, 94, 97–106. [Google Scholar] [CrossRef]
- Ostermeijer, F.; Koster, H.R.A.; van Ommeren, J. Residential parking costs and car ownership: Implications for parking policy and automated vehicles. Reg. Sci. Urban Econ. 2019, 77, 276–288. [Google Scholar] [CrossRef] [Green Version]
- Andersson, P.; Ivehammar, P. Benefits and costs of autonomous trucks and cars. J. Transp. Technol. 2019, 9, 2. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-163735 (accessed on 14 December 2021). [CrossRef] [Green Version]
- Walnum, H.J.; Aall, C.; Løkke, S. Can Rebound Effects Explain Why Sustainable Mobility Has Not Been Achieved? Sustainability 2014, 6, 9510. [Google Scholar] [CrossRef] [Green Version]
- Gehrke, S.R.; Felix, A.; Reardon, T.G. Substitution of Ride-Hailing Services for More Sustainable Travel Options in the Greater Boston Region. Transp. Res. Rec. 2019, 2673, 438–446. [Google Scholar] [CrossRef]
- Clewlow, R.R.; Mishra, G.S. Disruptive Transportation: The Adoption, Utilization, and Impacts of Ride-Hailing in the United States. October 2017. Available online: https://escholarship.org/uc/item/82w2z91j (accessed on 14 December 2021).
- KPMG International. 2020 Autonomous Vehicles Readiness Index. 2020. Available online: https://assets.kpmg/content/dam/kpmg/xx/pdf/2020/07/2020-autonomous-vehicles-readiness-index.pdf (accessed on 14 December 2021).
- Feys, M.; Rombaut, E.; Vanhaverbeke, L. Experience and Acceptance of Autonomous Shuttles in the Brussels Capital Region. Sustainability 2020, 12, 8403. [Google Scholar] [CrossRef]
- Taub, E.A. How Jaywalking Could Jam Up the Era of Self-Driving Cars National Center for Statistics and Analysis. New York Times, 7 August 2019. [Google Scholar]
- Pigeon, C.; Alauzet, A.; Paire-Ficout, L. Factors of acceptability, acceptance and usage for non-rail autonomous public transport vehicles: A systematic literature review. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 251–270. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Asgari, H.; Jin, X. Incorporating Attitudinal Factors to Examine Adoption of and Willingness to Pay for Autonomous Vehicles. Transp. Res. Rec. 2019, 2673, 418–429. [Google Scholar] [CrossRef]
- Cartenì, A. The acceptability value of autonomous vehicles: A quantitative analysis of the willingness to pay for shared autonomous vehicles (SAVs) mobility services. Transp. Res. Interdiscip. Perspect. 2020, 8, 100224. [Google Scholar] [CrossRef]
- Bansal, P.; Daziano, R.A. Influence of choice experiment designs on eliciting preferences for autonomous vehicles. Transp. Res. Procedia 2018, 32, 474–481. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A survey of public opinion about autonomous and self-driving vehicles in the U.S., the U.K., and Australia. University of Michigan, Ann Arbor, Transportation Research Institute, Technical Report. July 2014. Available online:http://deepblue.lib.umich.edu/handle/2027.42/108384 (accessed on 14 December 2021).
- Bansal, P.; Kockelman, K.M. Are we ready to embrace connected and self-driving vehicles? A case study of Texans. Transportation 2018, 45, 641–675. [Google Scholar] [CrossRef]
- Liu, P.; Guo, Q.; Ren, F.; Wang, L.; Xu, Z. Willingness to pay for self-driving vehicles: Influences of demographic and psychological factors. Transp. Res. Part C Emerg. Technol. 2019, 100, 306–317. [Google Scholar] [CrossRef]
- Alessandrini, A.; Alfonsi, R.; Site, P.D.; Stam, D. Users’ Preferences towards Automated Road Public Transport: Results from European Surveys. Transp. Res. Procedia 2014, 3, 139–144. [Google Scholar] [CrossRef] [Green Version]
- Herrenkind, B.; Brendel, A.B.; Nastjuk, I.; Greve, M.; Kolbe, L.M. Investigating end-user acceptance of autonomous electric buses to accelerate diffusion. Transp. Res. Part Transp. Environ. 2019, 74, 255–276. [Google Scholar] [CrossRef]
- Papadima, G.; Genitsaris, E.; Karagiotas, I.; Naniopoulos, A.; Nalmpantis, D. Investigation of acceptance of driverless buses in the city of Trikala and optimization of the service using Conjoint Analysis. Util. Policy 2020, 62, 100994. [Google Scholar] [CrossRef]
- Portouli, E.; Karaseitanidis, G.; Lytrivis, P.; Amditis, A.; Raptis, O.; Karaberi, C. Public attitudes towards autonomous mini buses operating in real conditions in a Hellenic city. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 571–576. [Google Scholar] [CrossRef]
- Medina, K.F.; Jenkins, R. GATEway: Public Perceptions of a Last-Mile Driverless Shuttle. 2017. Available online: https://gateway-project.org.uk/wp-content/uploads/2018/06/D3.7_TRL-Workshop-Findings-Report (accessed on 14 December 2021).
- Dong, X.; DiScenna, M.; Guerra, E. Transit user perceptions of driverless buses. Transportation 2019, 46, 35–50. [Google Scholar] [CrossRef]
- Lee, Y.-C.; Mirman, J.H. Parents’ perspectives on using autonomous vehicles to enhance children’s mobility. Transp. Res. Part C Emerg. Technol. 2018, 96, 415–431. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. Public opinion about self-driving vehicles in China, India, Japan, the U.S., the U.K., and Australia, University of Michigan, Ann Arbor, Transportation Research Institute, Technical Report. October 2014. Available online: http://deepblue.lib.umich.edu/handle/2027.42/109433 (accessed on 14 December 2021).
- Kyriakidis, M.; Happee, R.; de Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Roche-Cerasi, I. Public acceptance of driverless shuttles in Norway. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 162–183. [Google Scholar] [CrossRef]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Dekker, M.J. Riding a Self-Driving Bus to Work: Investigating How Travellers Perceive ADS-DVs on the Last Mile. 2017. Available online: https://repository.tudelft.nl/islandora/object/uuid%3Ac9773355-d4a3-4063-9799-11343c625c01 (accessed on 14 December 2021).
- Kostorz, N.; Hilgert, T.; Kagerbauer, M.; Vortisch, P. What Do People Think About Autonomous Minibuses in Germany? In Proceedings of the 8th Symposium of the European Association for Research in Transportation (hEART), Budapest, Hungary, 4–7 September 2019. [Google Scholar]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Moták, L.; Neuville, E.; Chambres, P.; Marmoiton, F.; Monéger, F.; Coutarel, F.; Izaute, M. Antecedent variables of intentions to use an autonomous shuttle: Moving beyond TAM and TPB? Eur. Rev. Appl. Psychol. 2017, 67, 269–278. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Ward, C.; Raue, M.; D’Ambrosio, L.; Coughlin, J.F. Age Differences in Acceptance of Self-driving Cars: A Survey of Perceptions and Attitudes. In Human Aspects of IT for the Aged Population. Aging, Design and User Experience; Springer: Cham, Switzerland, 2017; pp. 3–13. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Winter, S.R.; Rice, S.; Mehta, R.; Walters, N.W.; Pierce, M.B.; Anania, E.C.; Milner, M.N.; Rao, N. Do Americans differ in their willingness to ride in a driverless bus? J. Unmanned Veh. Syst. 2018, 6, 267–278. [Google Scholar] [CrossRef]
- Alessandrini, A. Investigating users’ attitudes towards conventional and automated buses in twelve European cities. Int. J. Transp. Econ. Riv. Internazionale Econ. Dei Trasp. 2016, XLIII 4, 413–436. [Google Scholar] [CrossRef]
- Pakusch, C.; Bossauer, P. User Acceptance of Fully Autonomous Public Transport. In Proceedings of the 14th International Joint Conference on e-Business and Telecommunications (ICETE 2017), Madrid, Spain, 24–26 July 2017; Volume 2, pp. 52–60. [Google Scholar]
- Wicki, M.; Guidon, S.; Becker, F.; Axhausen, K.W.; Bernauer, T. How technology commitment affects willingness to use AVs: Results from realistic mode choice experiment for a self-driving shuttle service. In Proceedings of the 19th Swiss Transport Research Conference (STRC 2019), Ascona, Switzerland, 15–17 May 2019. [Google Scholar] [CrossRef]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Penmetsa, P.; Adanu, E.K.; Wood, D.; Wang, T.; Jones, S.L. Perceptions and expectations of autonomous vehicles—A snapshot of vulnerable road user opinion. Technol. Forecast. Soc. Chang. 2019, 143, 9–13. [Google Scholar] [CrossRef]
- Winter, K.; Wien, J.; Molin, E.; Cats, O.; Morsink, P.; van Arem, B. Taking The Self-Driving Bus: A Passenger Choice Experiment. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Cracow, Poland, 5–7 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Payre, W.; van Arem, B.; Happee, R. What impressions do users have after a ride in an automated shuttle? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 252–269. [Google Scholar] [CrossRef] [Green Version]
- Adner, R. Ecosystem as Structure: An Actionable Construct for Strategy. J. Manag. 2017, 43, 39–58. [Google Scholar] [CrossRef]
- Moore, J.F. Predators and Prey: A New Ecology of Competition. Harv. Bus. Rev. 1993, 71, 75–86. [Google Scholar]
- Christensen, C.M.; Rosenbloom, R.S. Explaining the attacker’s advantage: Technological paradigms, organizational dynamics, and the value network. Res. Policy 1995, 24, 233–257. [Google Scholar] [CrossRef]
- Peppard, J.; Rylander, A. From Value Chain to Value Network: Insights for Mobile Operators. Eur. Manag. J. 2006, 24, 128–141. [Google Scholar] [CrossRef] [Green Version]
- Mills, L.S.; Doak, D.F. The Keystone-Species Concept in Ecology and Conservation. BioScience 1993, 43, 219–224. [Google Scholar] [CrossRef] [Green Version]
- Iansiti, M.; Levien, R. Strategy as ecology. Harv. Bus. Rev. 2004, 82, 68–78. [Google Scholar]
- Agrawal, A.; Cockburn, I. The anchor tenant hypothesis: Exploring the role of large, local, R&D-intensive firms in regional innovation systems. Int. J. Ind. Organ. 2003, 21, 1227–1253. [Google Scholar] [CrossRef]
- Furr, N.; Shipilov, A. Building the right ecosystem for innovation. MIT Sloan Manag. Rev. 2018, 59, 59–64. [Google Scholar]
- Clarysse, B.; Wright, D.; Bruneel, J.; Mahajan, A. Creating value in ecosystems: Crossing the chasm between knowledge and business ecosystems. Res. Policy 2014, 43, 1164–1176. [Google Scholar] [CrossRef]
- Komorowski, M. Innovation Ecosystems in Europe: First Outline of an Innovation Ecosystem Index; European Commission: Brussels, Belgium, 2019; Available online: https://ec.europa.eu/futurium/en/digital-transition/study-innovation-ecosystems-europe-0 (accessed on 14 December 2021).
- Vanobberghen, W.; Rombaut, E.; Feys, M.; De Cauwer, C.; Vanhaverbeke, L.; Gobbato, F.; Grulois, G.; Temmerman, L.; de Séjournet, A. Piloting an autonomous shuttle in the Brussels Capital Regions: Living lab insights and user reactions and acceptance. In Proceedings of the Digital Living Lab Days Conference 2020: Connecting People and Technologies towards a Citizen-Centered Digital Future, 2–4 September 2020; pp. 193–217. Available online: https://issuu.com/enoll/docs/proceedings_final (accessed on 14 December 2021).
- Kim, J.-H.; Jang, S. A scenario-based experiment and a field study: A comparative examination for service failure and recovery. Int. J. Hosp. Manag. 2014, 41, 125–132. [Google Scholar] [CrossRef]
- Brazil, W.; Caulfield, B.; O’Connor, A. The role of transport information in extreme weather events: A scenario based experiment. Case Stud. Transp. Policy 2017, 5, 215–223. [Google Scholar] [CrossRef]
- Ajzen, I. The Theory of Planned Behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Armitage, C.J.; Conner, M. Efficacy of the theory of planned behaviour: A meta-analytic review. Br. J. Soc. Psychol. 2001, 40, 471–499. [Google Scholar] [CrossRef] [Green Version]
- Homburg, C.; Koschate, N.; Hoyer, W.D. Do Satisfied Customers Really Pay More? A Study of the Relationship between Customer Satisfaction and Willingness to Pay. J. Mark. 2005, 69, 84–96. [Google Scholar] [CrossRef]
- Daoud, J.I. Multicollinearity and Regression Analysis. J. Phys. Conf. Ser. 2017, 949, 012009. [Google Scholar] [CrossRef]
- Norman, G. Likert scales, levels of measurement and the “laws” of statistics. Adv. Health Sci. Educ. 2010, 15, 625–632. [Google Scholar] [CrossRef]
- Rehrl, K.; Zankl, C. Digibus©: Results from the first self-driving shuttle trial on a public road in Austria. Eur. Transp. Res. Rev. 2018, 10, 51. [Google Scholar] [CrossRef]
- Statistiek Vlaanderen. Vooruitzichten Bevolking. Available online: https://statistieken.vlaanderen.be/QvAJAXZfc/notoolbar.htm?document=SVR%2FSV-Demografie-ProjectiesBevolking-20180226.qvw&host=QVS%40cwv100154&anonymous=true (accessed on 17 December 2021).
- Evans, D.S.; Schmalensee, R. The Industrial Organization of Markets with Two-Sided Platforms; Working Paper 11603; National Bureau of Economic Research: Brussels, Belgium, September 2005. [Google Scholar] [CrossRef]
- Rochet, J.-C.; Tirole, J. Platform Competition in Two-Sided Markets. J. Eur. Econ. Assoc. 2003, 1, 990–1029. [Google Scholar] [CrossRef] [Green Version]
- Gawer, A.; Cusumano, M.A. How Companies Become Platform Leaders; MIT Sloan Management Review: Cambridge, MA, USA, 2008. [Google Scholar]
- Yu, H. For some platforms, network effects are no match for local know-how. Harv. Bus. Rev. 2018, 26. Available online: https://hbr.org/2018/07/for-some-platforms-network-effects-are-no-match-for-local-know-how (accessed on 14 December 2021).
- Sheeran, P. Intention—Behavior Relations: A Conceptual and Empirical Review. Eur. Rev. Soc. Psychol. 2002, 12, 1–36. [Google Scholar] [CrossRef]
- Borhan, M.N.; Ibrahim, A.N.H.; Miskeen, M.A.A. Extending the theory of planned behaviour to predict the intention to take the new high-speed rail for intercity travel in Libya: Assessment of the influence of novelty seeking, trust and external influence. Transp. Res. Part A Policy Pract. 2019, 130, 373–384. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mobility (Service) Providers | Public Authorities and PTOs | Associations and Consultancies | AV Manufacturers |
|---|---|---|---|
| Be-Mobile | AWV | VIAS Institute | Volvo |
| Taxistop | MOW | Ertico | Easymile |
| Ush | FOD Mobility | Next Mobility | 2getthere (ZF Group) |
| De Lijn | Autodelen | ||
| STIB/MIVB |
| Independent Variable | Attitude t | Intention t | WTP Ride t | WTP Annual t |
|---|---|---|---|---|
| Context (closed vs. open road) | −0.079 | 0.543 | 0.330 | 0.145 |
| Awareness of AVs (yes vs. no) | 4.929 *** | 4.025 *** | −0.068 | −0.739 |
| Experience with AVs (yes vs. no) | −0.371 | 2.200 * | 1.525 | 1.678 |
| Living area (inhabitants vs. commuters) | 2.356 * | 0.383 | −0.483 | −0.238 |
| Car ownership (yes vs. no) | −2.097 * | −0.554 | 2.119 * | 1.339 |
| Reduced mobility (yes vs. no) | −0.606 | 0.129 | 3.452 ** | 1.508 |
| Gender (female vs. male) | −1.197 | −3.386 *** | −2.557 * | −0.321 |
| Independent Variable | Attitude t | Intention t | WTP Ride t | WTP Annual t |
|---|---|---|---|---|
| Context (closed vs. open road) | −0.0231 | 0.726 | −0.882 | 0.598 |
| Awareness of Avs (yes vs. no) | 3.433 ** | 2.598 ** | 0.825 | 0.144 |
| Experience with Avs (yes vs. no) | −1.039 | 0.727 | 2.039 * | 2.855 * |
| Living area (inhabitants vs. commuters) | 0.795 | −1.163 | −0.656 | −0.959 |
| Car ownership (yes vs. no) | −1.139 | −0.554 | 0.201 | 1.382 |
| Reduced mobility (yes vs. no) | −1.561 | 0.948 | 2.977 ** | 3.489 *** |
| Gender (female vs. male) | −0.929 | −2.833 * | −2.952 * | −3.273 *** |
| Independent Variable | Attitude | Intention | WTP Ride | WTP Annual | |||
|---|---|---|---|---|---|---|---|
| Step 1 β | Step 1 β | Step 2 β | Step 1 β | Step 2 β | Step 1 β | Step 2 β | |
| Usefulness | - | 0.392 *** | 0.392 *** | −0.016 | 0.005 | 0.091 | 0.087 |
| Pleasantness | - | 0.015 | 0.024 | −0.091 | −0.083 | 0.041 | 0.036 |
| Safety | - | 0.117 * | 0.108 * | 0.054 | 0.044 | −0.081 | −0.087 |
| Ease of use | - | 0.196 *** | 0.185 *** | −0.104 | −0.098 | −0.117 | −0.117 |
| Relaxing | - | 0.062 | 0.078 | −0.151 * | −0.077 | −0.020 | 0.016 |
| Intention | - | - | - | 0.218 *** | 0.199 *** | 0.202 ** | 0.219 ** |
| Familiarity | 0.167 *** | −0.160 *** | 0.129 *** | 0.096 | 0.021 | 0.059 | 0.060 |
| Living area | −0.059 | 0.028 | −0.011 | −0.022 | |||
| Car ownership | 0.087 | 0.010 | −0.073 | −0.122 * | |||
| Reduced mobility | −0.091 | −0.006 | 0.209 *** | 0.165 ** | |||
| Gender | −0.007 | 0.071 | 0.056 | −0.026 | |||
| Age | 0.097 | 0.025 | −0.204 *** | −0.251 *** | |||
| Education | −0.014 | 0.067 | 0.021 | −0.032 | |||
| Employment | 0.012 | 0.071 | 0.007 | 0.061 | |||
| Income | 0.028 | 0.013 | 0.146 ** | 0.030 | |||
| F | 2.786 ** | 46.514 *** | 21.067 *** | 4.169 *** | 6.322 *** | 2.607 * | 4.393 *** |
| Adjusted R2 | 0.036 | 0.387 | 0.394 | 0.056 | 0.175 | 0.033 | 0.134 |
| Independent Variable | Attitude | Intention | WTP Ride | WTP Annual | |||
|---|---|---|---|---|---|---|---|
| Step 1 β | Step 1 β | Step 2 β | Step 1 β | Step 2 β | Step 1 β | Step 2 β | |
| Usefulness | - | 0.294 *** | 0.290 *** | −0.157 * | −0.140 * | −0.125 | −0.089 |
| Pleasantness | - | 0.175 *** | 0.182 *** | 0.001 | 0.009 | 0.022 | 0.040 |
| Safety | - | 0.112 * | 0.100 * | 0.067 | 0.064 | −0.007 | −0.010 |
| Ease of use | - | 0.051 | 0.033 | −0.096 | −0.064 | −0.073 | −0.067 |
| Relaxing | - | 0.137 * | 0.159 ** | −0.112 | −0.028 | −0.075 | −0.018 |
| Intention | - | - | - | 0.238 *** | 0.163 * | 0.163 * | 0.087 |
| Familiarity | 0.101 | −0.148 *** | 0.107 * | 0.148 ** | 0.052 | 0.131 * | 0.054 |
| Living area | −0.002 | 0.083 | −0.043 | 0.019 | |||
| Car ownership | 0.075 | 0.038 | 0.004 | −0.066 | |||
| Reduced mobility | −0.131 * | 0.100 * | 0.157 ** | 0.194 *** | |||
| Gender | −0.010 | 0.063 | 0.096 | 0.104 * | |||
| Age | 0.172 ** | 0.046 | −0.243 *** | −0.204 *** | |||
| Education | 0.017 | −0.002 | 0.028 | 0.006 | |||
| Employment | −0.021 | 0.092 | 0.075 | 0.003 | |||
| Income | 0.137 * | 0.077 | 0.132 * | 0.176 ** | |||
| F | 3.244 *** | 38.062 *** | 18.842 *** | 4.303 *** | 5.837 *** | 3.021 * | 5.641 *** |
| Adjusted R2 | 0.051 | 0.371 | 0.399 | 0.068 | 0.187 | 0.036 | 0.156 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Camps-Aragó, P.; Temmerman, L.; Vanobberghen, W.; Delaere, S. Encouraging the Sustainable Adoption of Autonomous Vehicles for Public Transport in Belgium: Citizen Acceptance, Business Models, and Policy Aspects. Sustainability 2022, 14, 921. https://doi.org/10.3390/su14020921
Camps-Aragó P, Temmerman L, Vanobberghen W, Delaere S. Encouraging the Sustainable Adoption of Autonomous Vehicles for Public Transport in Belgium: Citizen Acceptance, Business Models, and Policy Aspects. Sustainability. 2022; 14(2):921. https://doi.org/10.3390/su14020921
Chicago/Turabian StyleCamps-Aragó, Pol, Laura Temmerman, Wim Vanobberghen, and Simon Delaere. 2022. "Encouraging the Sustainable Adoption of Autonomous Vehicles for Public Transport in Belgium: Citizen Acceptance, Business Models, and Policy Aspects" Sustainability 14, no. 2: 921. https://doi.org/10.3390/su14020921
APA StyleCamps-Aragó, P., Temmerman, L., Vanobberghen, W., & Delaere, S. (2022). Encouraging the Sustainable Adoption of Autonomous Vehicles for Public Transport in Belgium: Citizen Acceptance, Business Models, and Policy Aspects. Sustainability, 14(2), 921. https://doi.org/10.3390/su14020921