

Study on Vehicle–Road Interaction for Autonomous Driving


Abstract
:1. Introduction
2. Test Materials and Method
2.1. Test Materials
2.2. Test Method
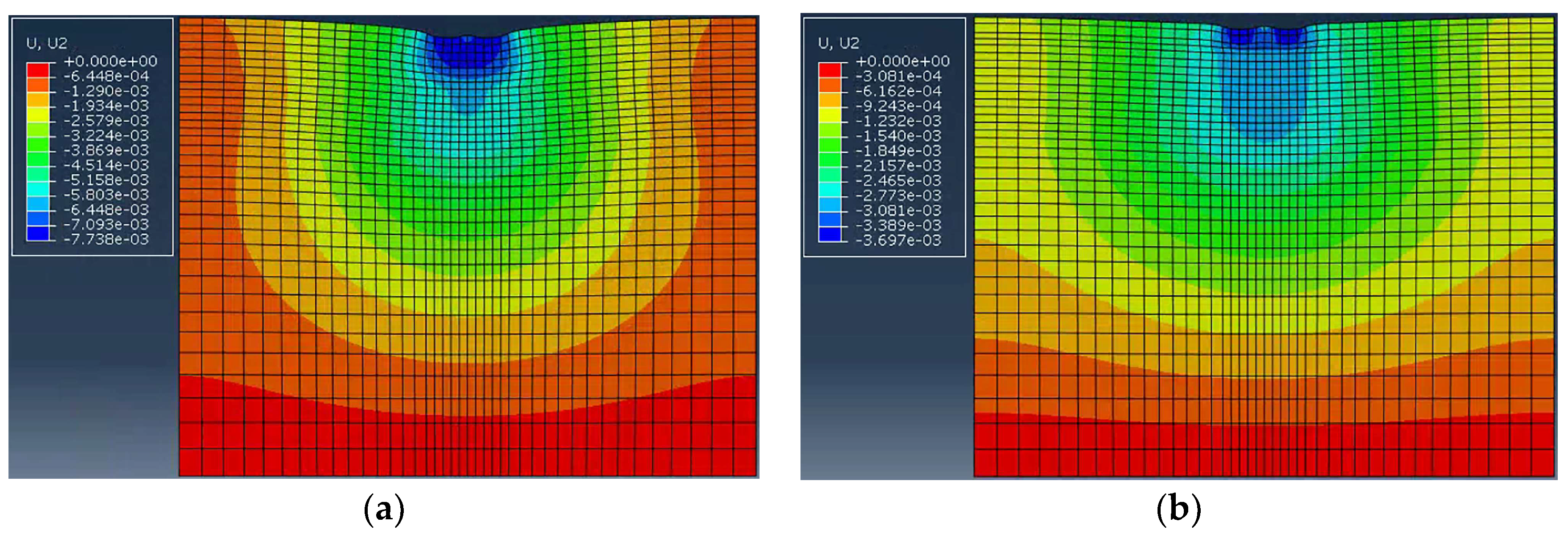
2.2.1. Simulation Calculation of Pavement Rutting
- (1)
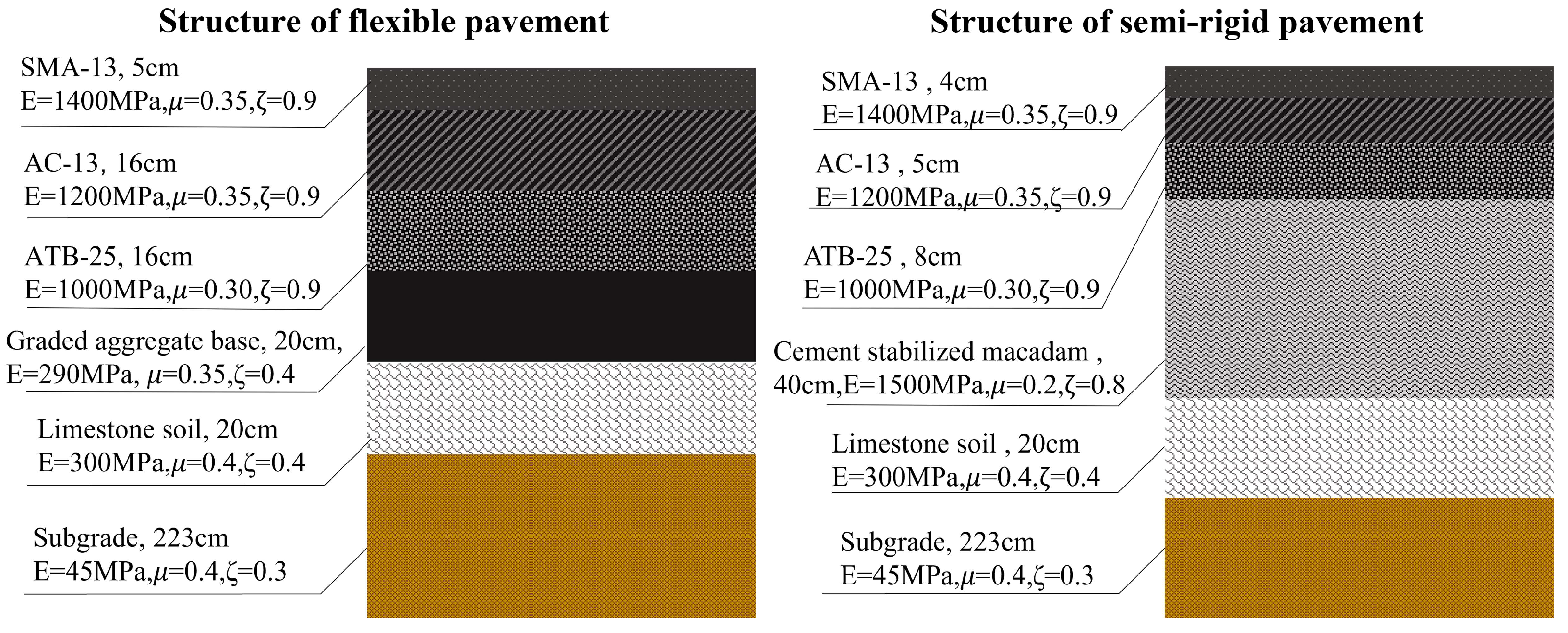
- Finite element model of the pavement structure
- (2)
- Load parameters
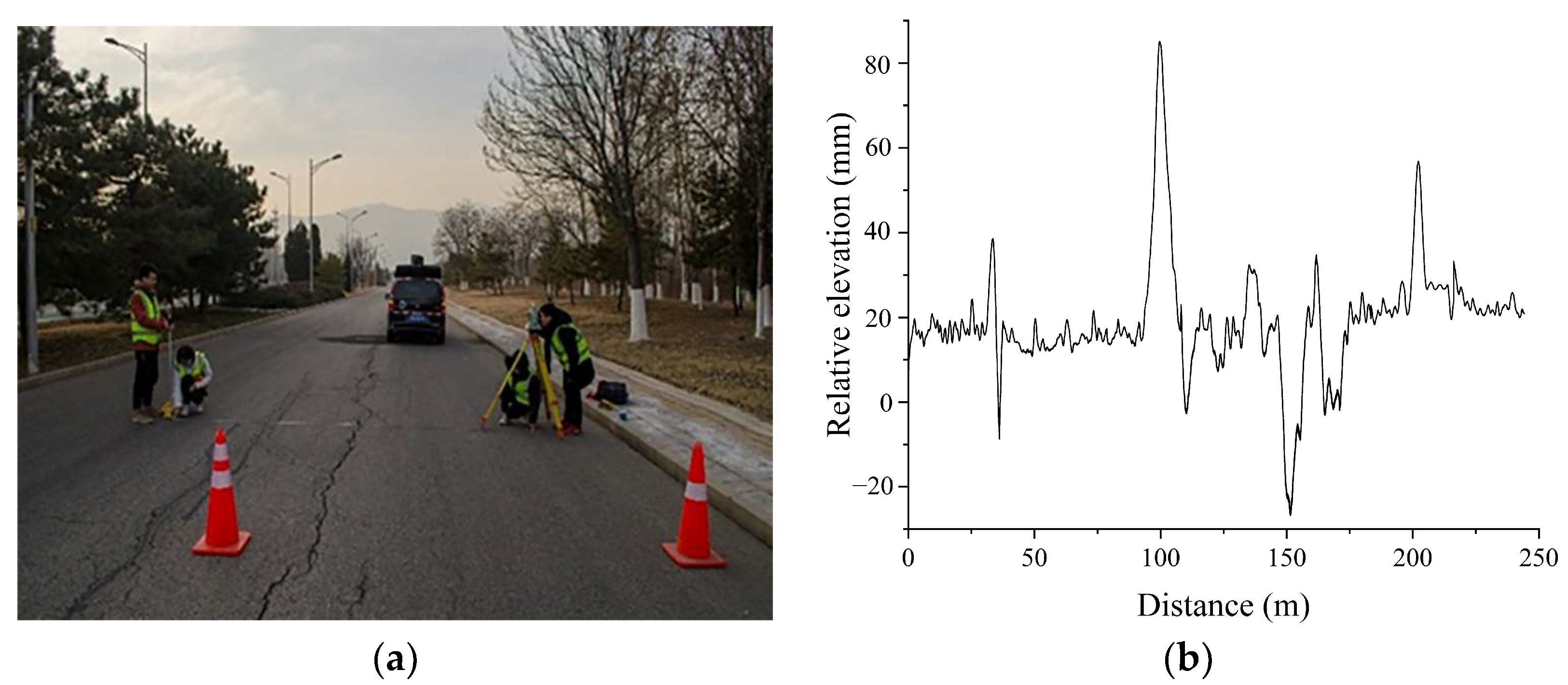
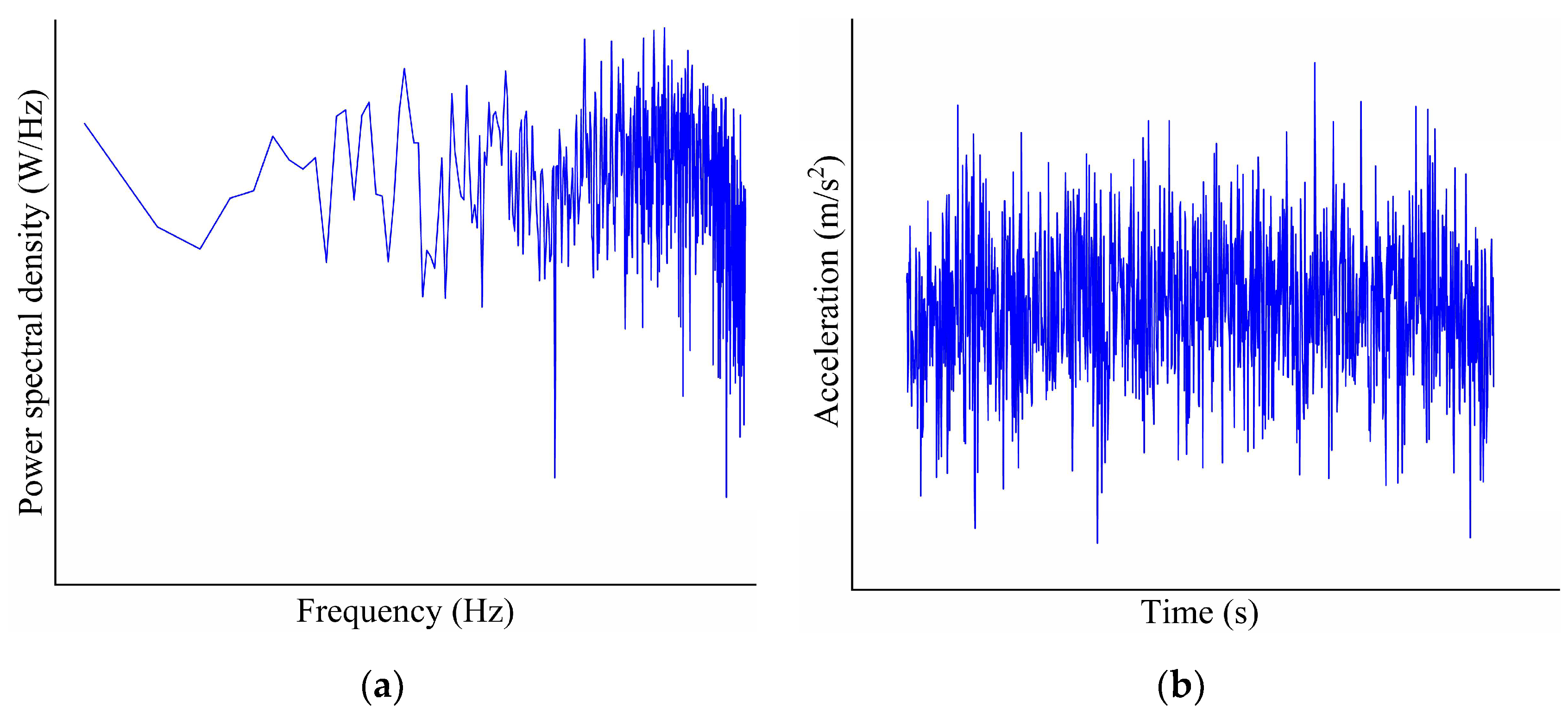
2.2.2. Acquisition of Road Roughness and Vehicle Vibration Acceleration
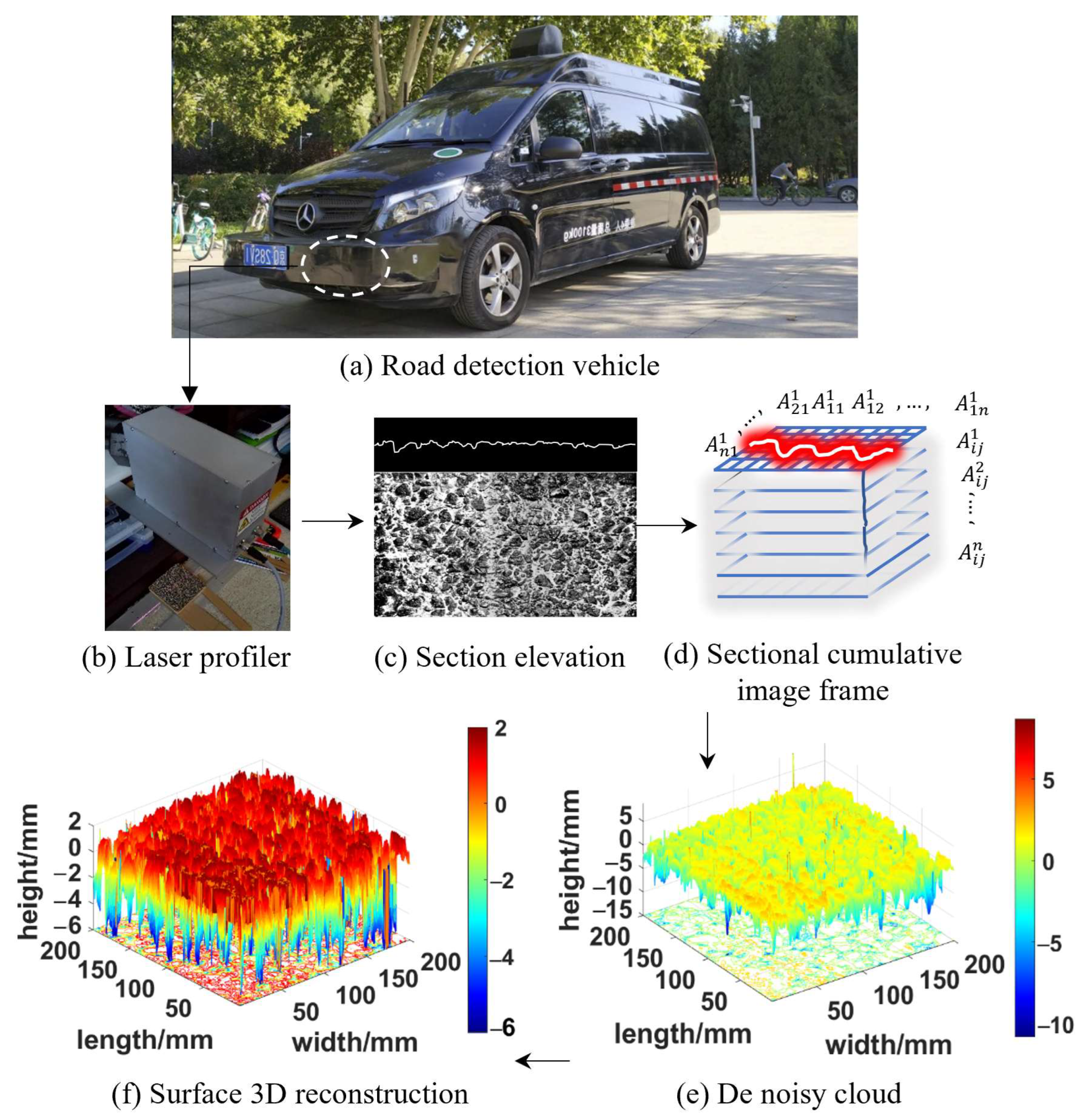
2.2.3. Acquisition of Pavement Texture and Skid Resistance
3. Results and Discussion
3.1. Influence of AVs on Rutting
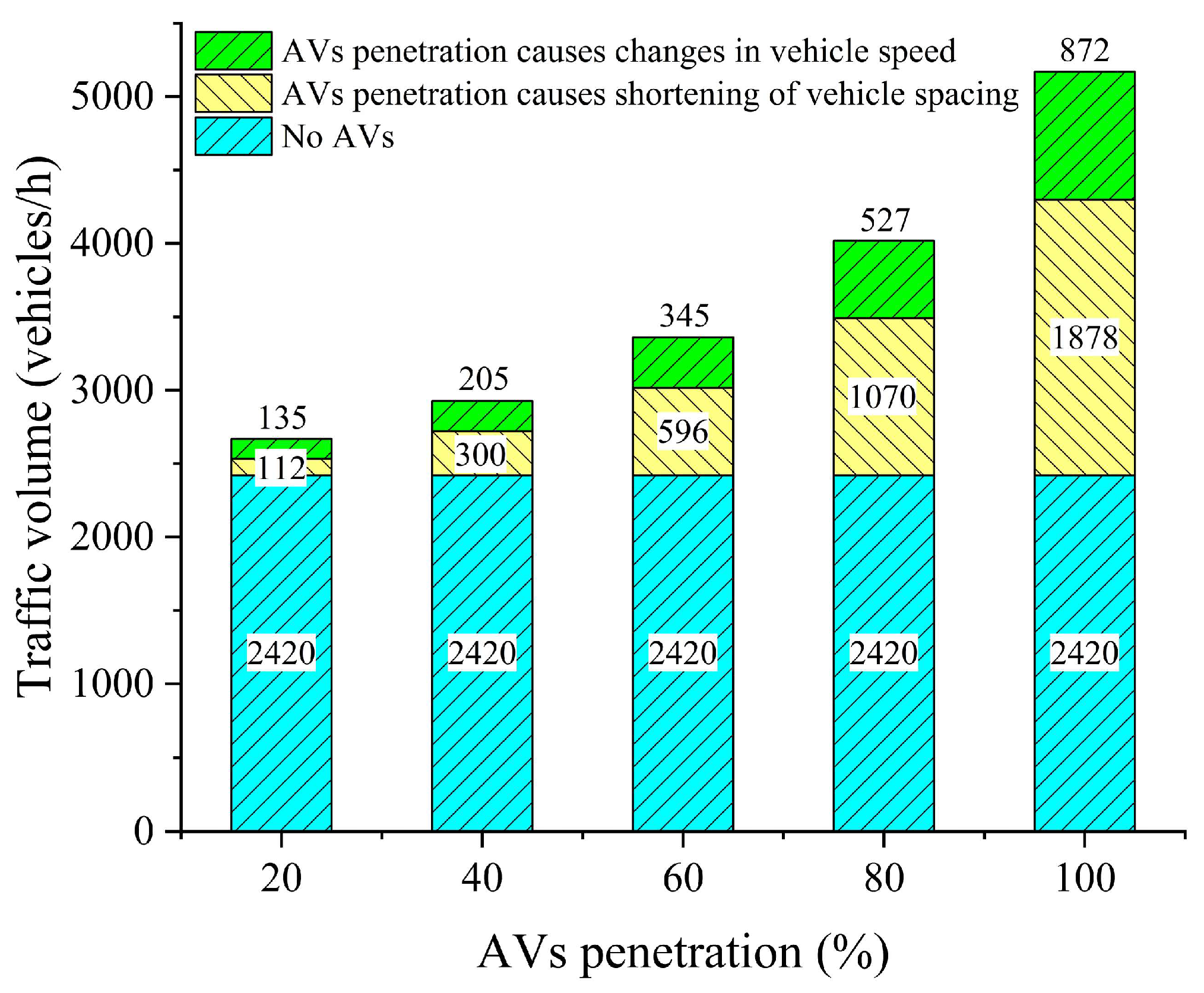
3.1.1. Influence of AVs Popularization on Traffic Volume
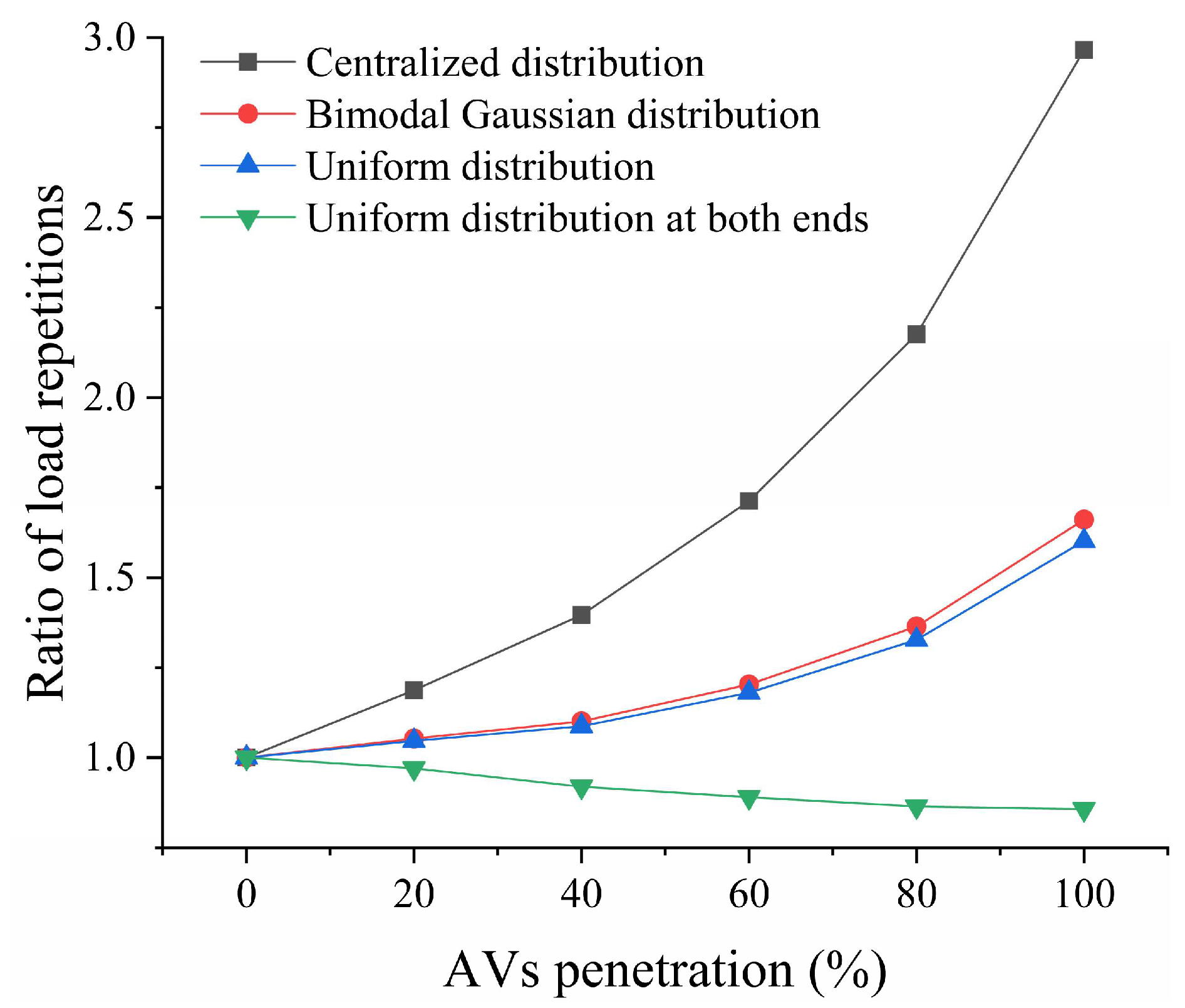
3.1.2. Influence of AVs Popularization on Load Repetitions
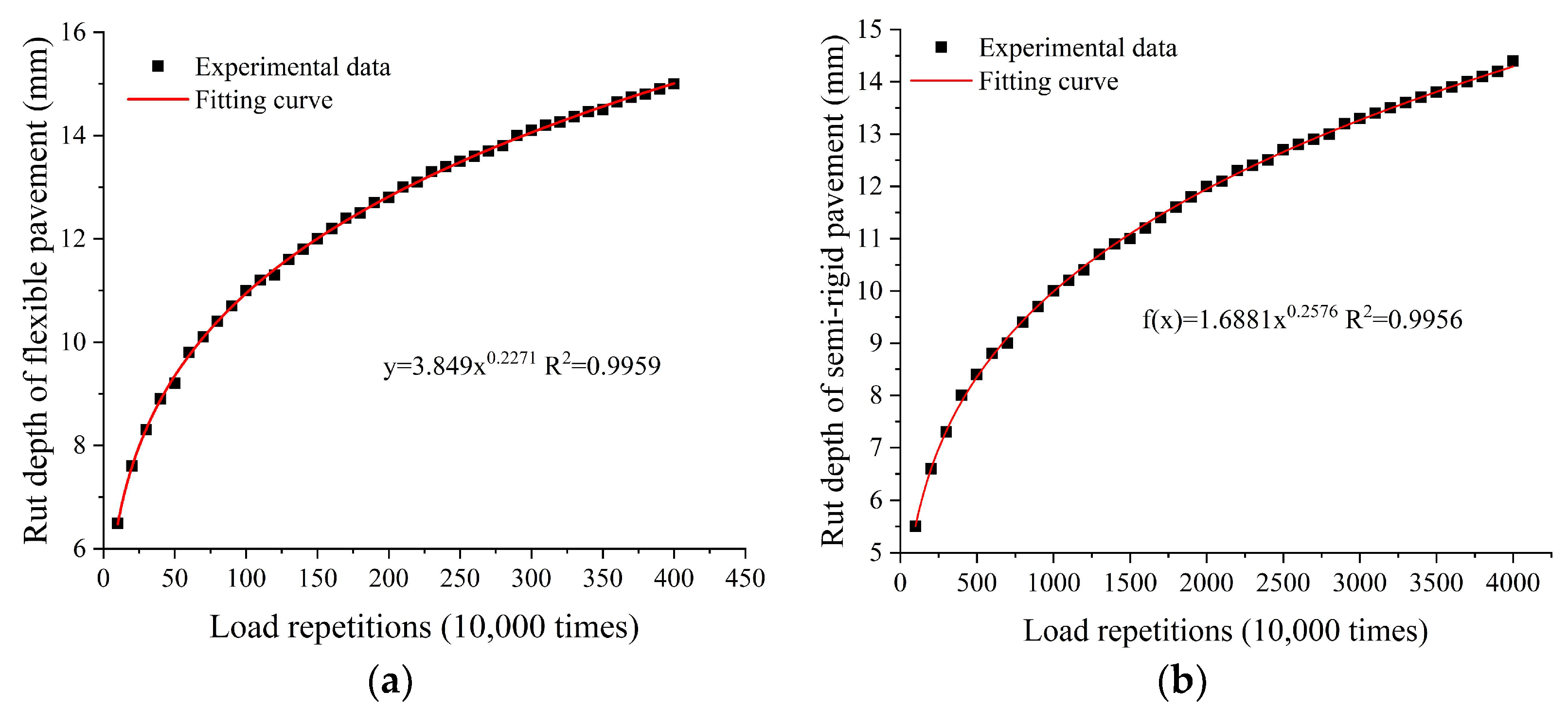
3.1.3. Influence of AVs Popularization on Rutting
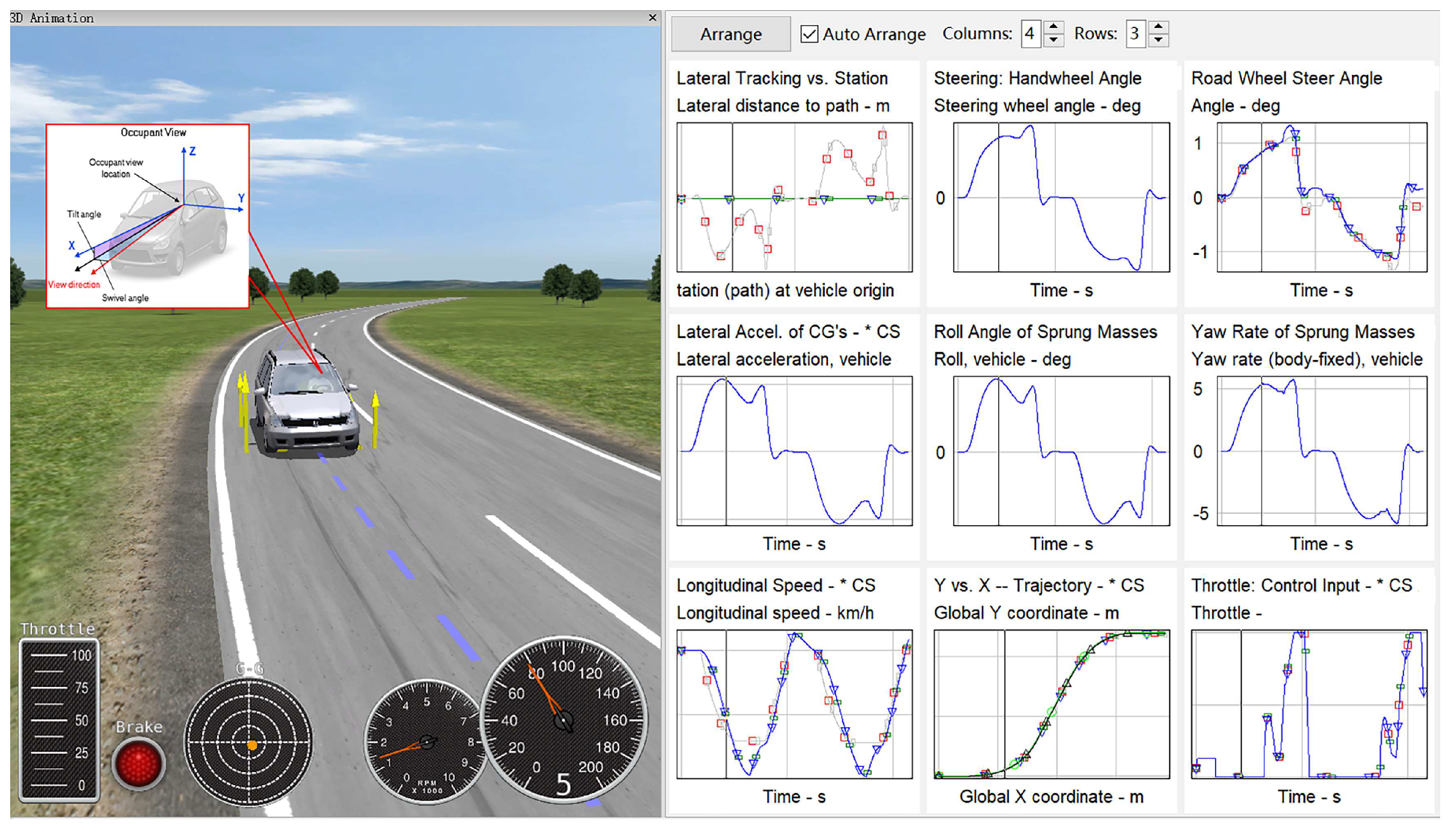
3.1.4. The Framework of Lateral Control on AVs
3.2. Influence of Road Performance on Driving Behavior of AVs
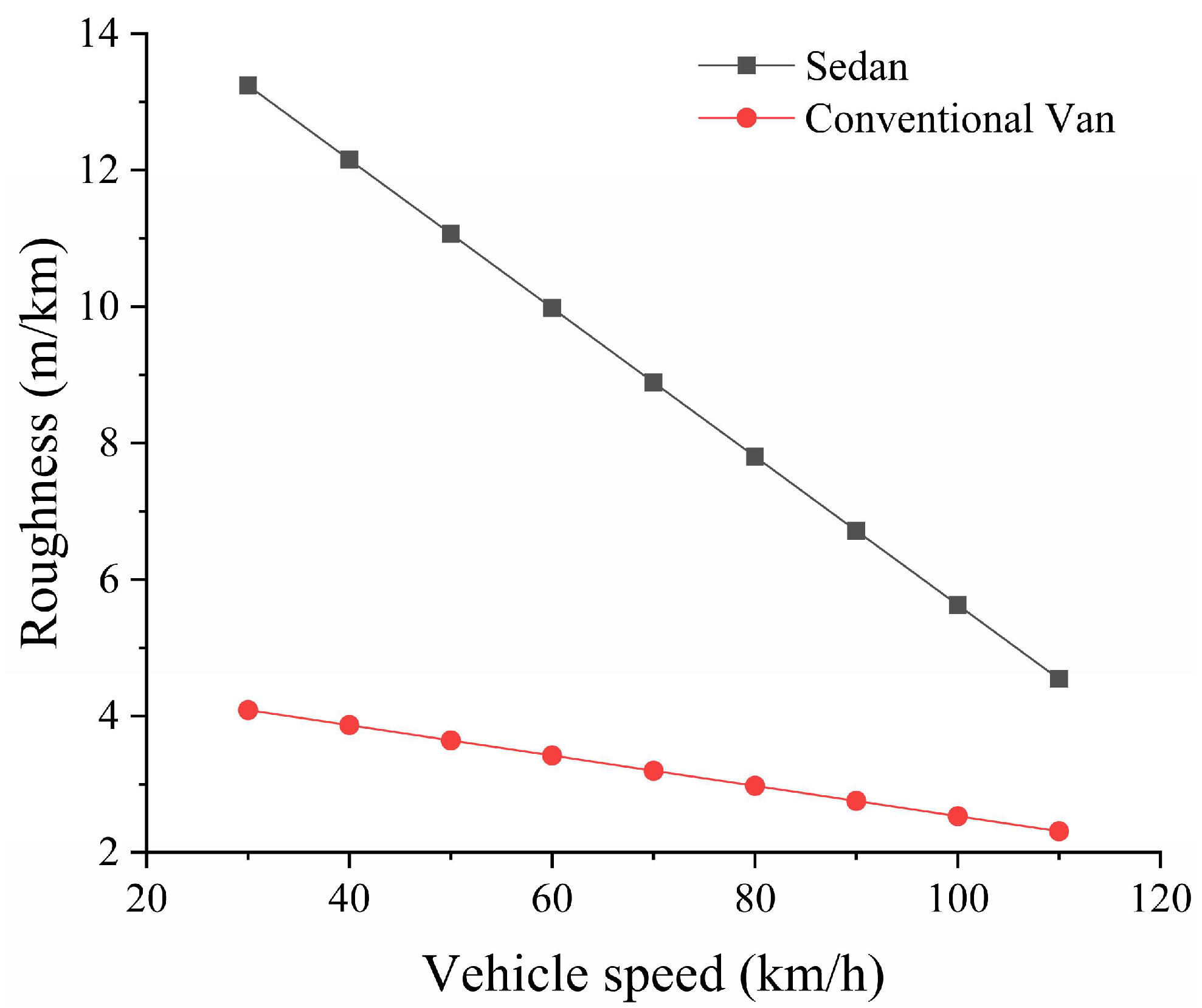
3.2.1. Relationship between Roughness and AVs Comfort
3.2.2. Pavement Texture and Safe Driving Behavior of AVs
- (1)
- Correlation analysis between pavement texture and skid resistance
- (2)
- Skid resistance and driving safety of AVs
3.2.3. Speed Control Strategy of AVs Based on Pavement Performance
4. Conclusions
- (1)
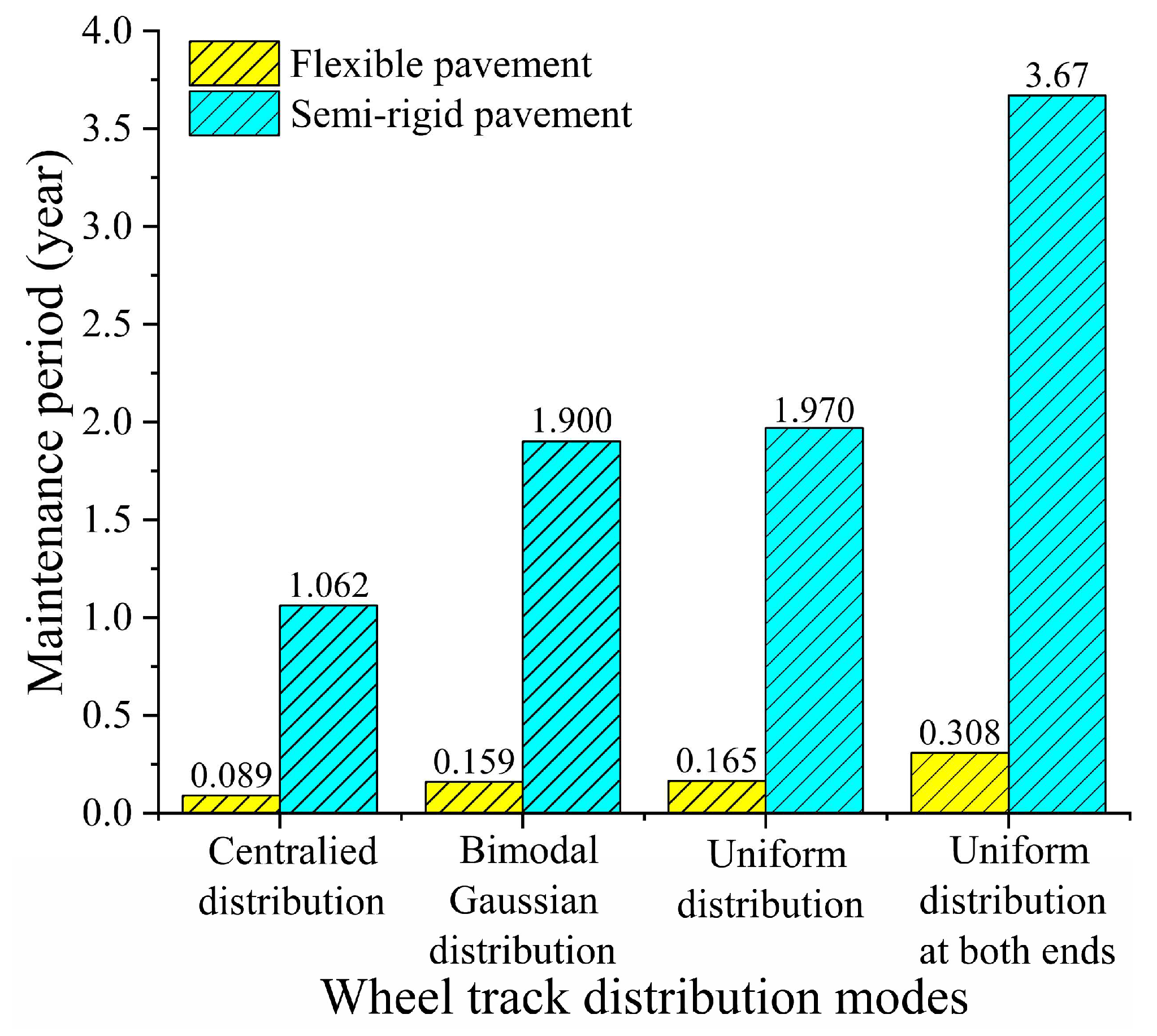
- Considering the change in traffic volume caused by AVs, the semi-rigid pavement has a longer maintenance period than flexible pavement under various wheel track distribution modes. When the AVs’ penetration rate reaches 100%, only the uniform distribution at both ends can reduce the number of loads in the wheel track by 24.3%, and prolong the maintenance period of flexible pavement and semi-rigid pavement by 0.041 and 0.53 years, respectively.
- (2)
- There is a linear relationship between roughness and passenger comfort. The goodness of fit of the comfort prediction model based on roughness and vehicle speed is almost one. To ensure the comfort of passengers, the AVs should reduce the speed as the roughness becomes worse. Under the same road roughness, the critical value of vehicle speed to meet the comfort of truck passengers is significantly smaller than that of cars, which indicates that specific vehicle speed control strategies need to be formulated for different vehicle types.
- (3)
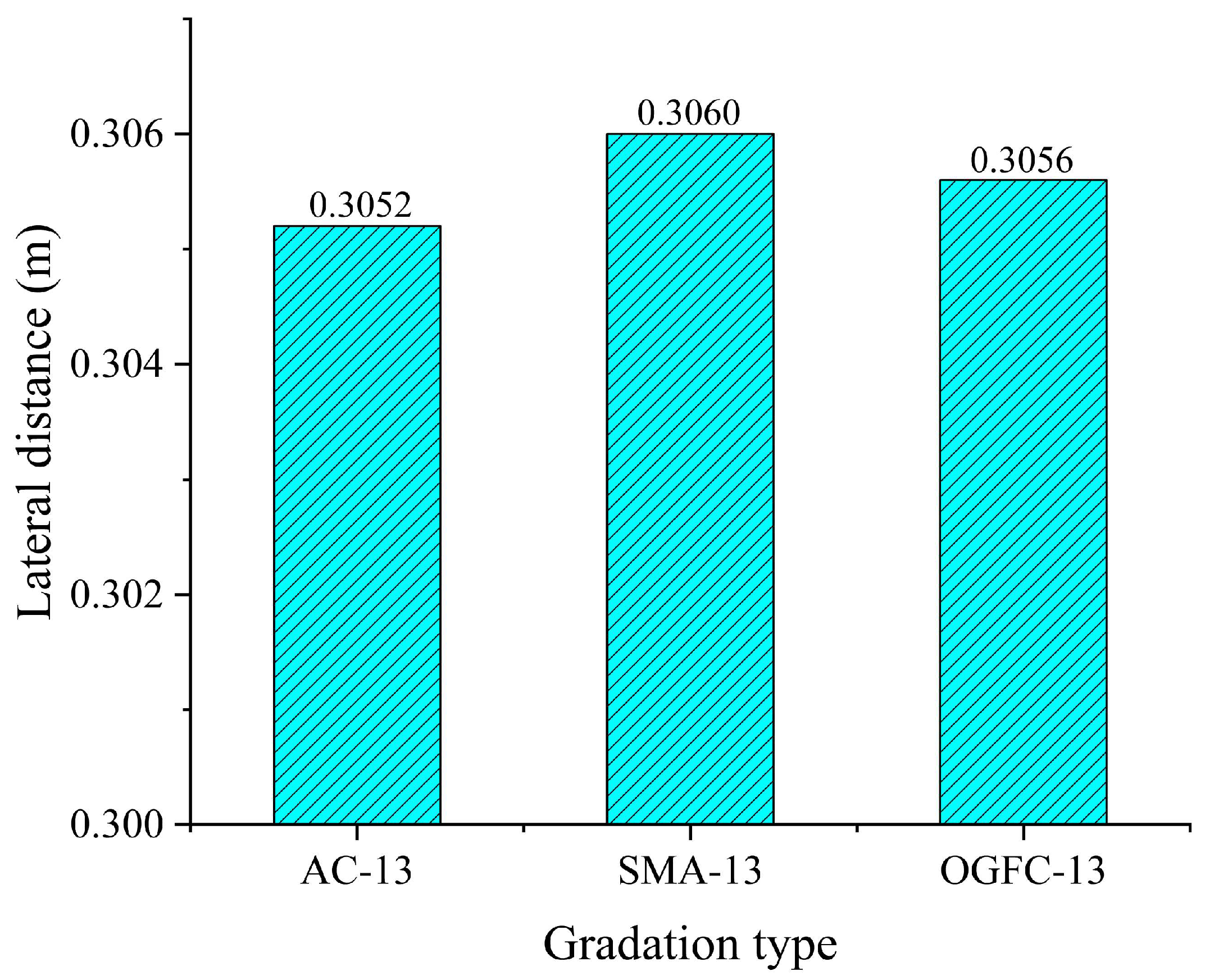
- In the relationship between texture index and BPN, the correlation coefficient between Ra and BPN is 0.928, and the influence coefficient of Ra on BPN is 0.973, which is higher than other texture indexes. It proves the effectiveness of using Ra to predict the road friction coefficient. In the Carsim vehicle dynamic simulation, the texture structure provided by AC-13 to AVs for safe driving was more complete.
- (4)
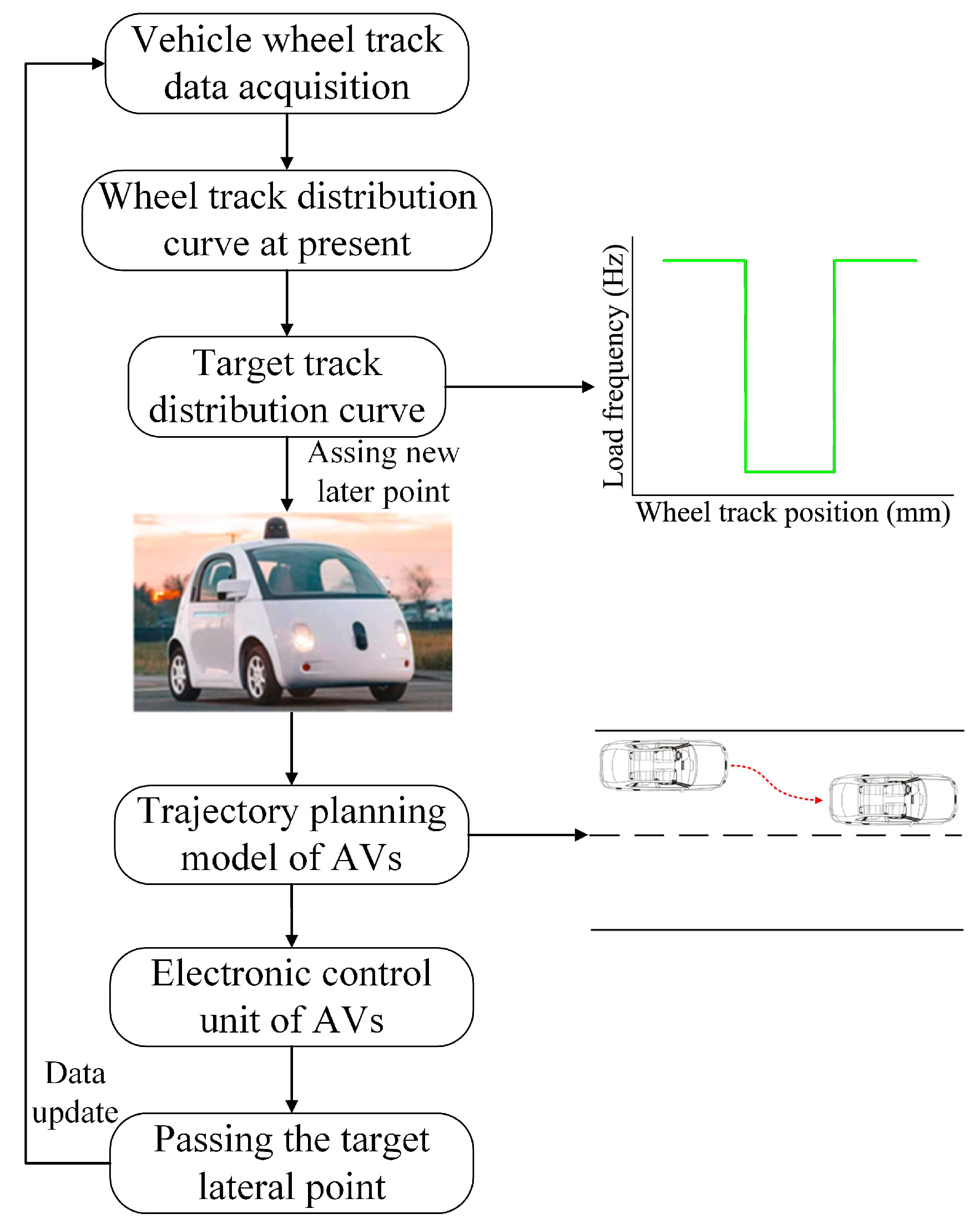
- In the aspect of lateral control of AVs, this paper proposes that the lateral position of AVs can be assigned according to the current and target wheel track distribution curve, and trajectory planning can be carried out. However, the specific mode and effect of the lateral intervention of the wheel track of AVs need further research, and the feasibility and reliability of the lateral control should be evaluated.
- (5)
- In the speed control of AVs, the hyperbolic tangent speed function curve was introduced in this paper. Considering the influence of pavement performance on riding comfort and braking safety, the stability coefficient k of the speed curve was determined to realize the speed control of AVs. In the future, the difference between the speed control strategy of AVs and HVs can be studied in depth, and the influence of different vehicle types and different driving environments on the speed control strategy of AVs can be analyzed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Definitions |
|---|---|
| The uniaxial equivalent creep strain | |
| The uniaxial equivalent creep strain | |
| q | Eccentric stress |
| A | Creep parameter |
| n | Creep parameter |
| m | Creep parameter |
| t | Ttime |
| N | The number of wheel load actions |
| nw | The number of axles |
| v | Vehicle speed |
| P | Standard load |
| p | Tire grounding pressure |
| B | The rectangular width of single wheel grounding |
| Ch | Traffic volume of HVs |
| Ca | Traffic volume of AVs |
| Cm | Traffic volume of AVs and HVs mixed traffic flow |
| L | Vehicle length |
| g | AVs penetration |
| Thh | The time gap to the preceding vehicle |
| Taa | The time gap between AVs and front HVs |
| Thx | The time gap between HVs and front vehicle |
| Tah | The time gap between AVs and front HVs |
| Lpkw | The length of lane occupied by vehicle |
| Fij(x) | The synthetic transverse distribution function |
| wj | The proportion of HVs |
| f(x) | Load frequency curve of HVs |
| gi(x) | Load frequency of AVs |
| Ga(f) | The acceleration self-power spectrum function |
| w(f) | Frequency weighting function |
| wx(f) | Frequency weighting function in x-axis direction |
| wy(f) | Frequency weighting function in y-axis direction |
| wz(f) | Frequency weighting function in Z-axis direction |
| f | Frequency |
| aw | One-way weighted root mean square value of acceleration |
| awx | Root mean square value of acceleration in X-axis |
| awy | Root mean square value of acceleration in y-axis |
| awz | Root mean square value of acceleration in z-axis |
| x(f) | The Fourier transform function of time-domain acceleration |
| IRI | International roughness index |
| BPN | British pendulum number |
| MPD | Mean profile depth |
| MTD | Mean texture depth |
| Rq | Root mean square deviation of the profile |
| Ra | Average deviation of the contour arithmetic |
| Friction coefficient | |
| vf | Final speed |
| v0 | Initial speed |
| b | Half of the absolute speed difference |
| Error | |
| k | Stability coefficient that determines the shape of the speed change |
| k1 | Stability coefficient calculated by ensuring that the acceleration does not Exceed the passenger comfort limit during deceleration |
| k2 | Stability coefficient calculated by ensuring the vehicle bumps do not exceed the passenger comfort limit |
| k3 | Stability coefficient calculated under the maximum braking acceleration |
| Time constant | |
| tanh | Hyperbolic tangent function |
| adv | Root mean square value of weighted acceleration |
| av | Vehicle vibration acceleration |
| ad | Acceleration produced during vehicle deceleration |
| ww | The weights of road roughness |
| wd | The weights of acceleration caused by vehicle deceleration |
References
- Sun, H.; Jing, P.; Zhao, M.; Chen, Y.; Zhan, F.; Shi, Y. Research on the Mode Choice Intention of the Elderly for Autonomous Vehicles Based on the Extended Ecological Model. Sustainability 2020, 12, 10661. [Google Scholar] [CrossRef]
- Miller, K.; Chng, S.; Cheah, L. Understanding acceptance of shared autonomous vehicles among people with different mobility and communication needs. Travel Behav. Soc. 2022, 29, 200–210. [Google Scholar] [CrossRef]
- Nuzzolo, A.; Persia, L.; Comi, A.; Polimeni, A. Shared Autonomous Electrical Vehicles and Urban Mobility: A Vision for Rome in 2035. In Conference on Sustainable Urban Mobility; Springer: Cham, Switzerland, 2019; pp. 772–779. [Google Scholar] [CrossRef]
- Bosch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 16. [Google Scholar] [CrossRef]
- Becker, F.; Axhausen, K.W. Literature review on surveys investigating the acceptance of automated vehicles. Transportation 2017, 44, 1293–1306. [Google Scholar] [CrossRef]
- Abu Bakar, A.I.; Abas, M.A.; Said, M.F.M.; Azhar, T.A.T. Synthesis of Autonomous Vehicle Guideline for Public Road-Testing Sustainability. Sustainability 2022, 14, 1456. [Google Scholar] [CrossRef]
- Chen, F.; Balieu, R.; Kringos, N. Potential influences on long-term service performance of road infrastructure by automated vehicles. Transp. Res. Rec. J. Transp. Res. Board 2016, 2550, 72–79. [Google Scholar] [CrossRef]
- Friedrich, B. The effect of autonomous vehicles on traffic. In Autonomous Driving; Springer: Berlin, Germany, 2016; pp. 317–334. [Google Scholar] [CrossRef]
- Du, Y.; Chen, J.; Zhao, C.; Liu, C.; Liao, F.; Chan, C.-Y. Comfortable and energy-efficient speed control of autonomous vehicles on rough pavements using deep reinforcement learning. Transp. Res. Part C Emerg. Technol. 2021, 134, 103489. [Google Scholar] [CrossRef]
- Zheng, B. Research on Skid Resistance of Asphalt Pavement and Measurement Requirements for Autonomous Vehicle during Braking Process; Southeast University: Dhaka, Bangladesh, 2021. [Google Scholar]
- Chen, F.; Song, M.; Ma, X.; Zhu, X. Assess the impacts of different autonomous trucks’ lateral control modes on asphalt pavement performance. Transp. Res. Part C Emerg. Technol. 2019, 103, 12. [Google Scholar] [CrossRef]
- Farah, H.; Erkens, S.M.J.G.; Alkim, T.; van Arem, B. Infrastructure for Automated and Connected Driving: State of the Art and Future Research Directions. In Road Vehicle Automation 4; Springer: Berlin, Germany, 2018; pp. 187–197. [Google Scholar]
- Zhou, F.; Hu, S.; Chrysler, S.T.; Kim, Y.; Damnjanovic, I.; Talebpour, A.; Espejo, A. Optimization of Lateral Wandering of Automated Vehicles to Reduce Hydroplaning Potential and to Improve Pavement Life. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 81–89. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Deluka Tibljaš, A.; Giuffrè, T.; Surdonja, S.; Trubia, S. Introduction of Autonomous Vehicles: Roundabouts Design and Safety Performance Evaluation. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef]
- Mohajer, N.; Nahavandi, S.; Abdi, H.; Najdovski, Z. Enhancing Passenger Comfort in Autonomous Vehicles Through Vehicle Handling Analysis and Optimization. IEEE Intell. Transp. Syst. Mag. 2020, 13, 156–173. [Google Scholar] [CrossRef]
- Choi, Y.-M.; Park, J.-H. Game-Based Lateral and Longitudinal Coupling Control for Autonomous Vehicle Trajectory Tracking. IEEE Access 2021, 10, 31723–31731. [Google Scholar] [CrossRef]
- Nguyen, A.-T.; Rath, J.; Guerra, T.-M.; Palhares, R.; Zhang, H. Robust Set-Invariance Based Fuzzy Output Tracking Control for Vehicle Autonomous Driving Under Uncertain Lateral Forces and Steering Constraints. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5849–5860. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A Decision-Making Strategy for Vehicle Autonomous Braking in Emergency via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 5876–5888. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, J. A Novel Initiative Braking System With Nondegraded Fallback Level for ADAS and Autonomous Driving. IEEE Trans. Ind. Electron. 2019, 67, 4360–4370. [Google Scholar] [CrossRef]
- Gounis, K.; Bassiliades, N. Intelligent momentary assisted control for autonomous emergency braking. Simul. Model. Pract. Theory 2021, 115, 102450. [Google Scholar] [CrossRef]
- Huang, X.; Jiang, Y.; Zheng, B.; Zhao, R. Theory and methodology on safety braking of autonomous vehicles based on the friction characteristic of road surface. Chin. Sci. Bull. 2020, 65, 3328–3340. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ban, N.T.; Han, N.D. Communication Solutions for Vehicle Ad-hoc Network in Smart Cities Environment: A Comprehensive Survey. Wirel. Pers. Commun. 2021, 122, 2791–2815. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ban, N.T.; Han, N.D. A Survey of QoS-aware Routing Protocols for the MANET-WSN Convergence Scenarios in IoT Networks. Wirel. Pers. Commun. 2021, 120, 49–62. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ngoc, L.A. Routing Algorithms for MANET-IoT Networks: A Comprehensive Survey. Wirel. Pers. Commun. 2022, 125, 3501–3525. [Google Scholar] [CrossRef]
- Du, Y.; Liu, C.; Li, Y. Velocity control strategies to improve automated vehicle driving comfort. IEEE Intell. Transp. Syst. Mag. 2018, 10, 8–18. [Google Scholar] [CrossRef]
- Du, Y.; Liu, C.; Song, Y.; Li, Y.; Shen, Y. Rapid estimation of road friction for anti-skid autonomous driving. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2461–2470. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, H.; Liu, Z.; Gu, M. Ride Comfort Optimization via Speed Planning and Preview Semi-Active Suspension Control for Autonomous Vehicles on Uneven Roads. IEEE Trans. Veh. Technol. 2020, 69, 8343–8355. [Google Scholar] [CrossRef]
- JTG F40-2004; Technical Specifications for Construction of Highway Asphalt Pavements. Ministry of Transportation Highway Research Institute: Beijing, China.
- Yun, J.; Hemmati, N.; Lee, M.-S.; Lee, S.-J. Laboratory Evaluation of Storage Stability for CRM Asphalt Binders. Sustainability 2022, 14, 7542. [Google Scholar] [CrossRef]
- Liao, G.; Huang, X. Application of ABAQUS Finite Element Software in Road Engineering; Southeast University Press: Nanjing, China, 2014. [Google Scholar]
- Zhou, Y.; Guo, R. Road inspection vehicle based on 3D technology. Highw. Eng. 2019, 44, 4. [Google Scholar]
- Li, L.; Wang, K.C.; Li, Q. Geometric texture indicators for safety on AC pavements with 1mm 3D laser texture data. Int. J. Pavement Res. Technol. 2016, 9, 49–62. [Google Scholar] [CrossRef]
- Li, Z. Traffic Engineering. China Communication Press Co.,Ltd.: Beijing, China, 2017. [Google Scholar]
- Hao, W.; Yu, H.; Gao, Z.; Zhang, Z.; Huang, Z. Management Method for Cooperative Adaptive Cruise Control Vehicle Flow Considering Dedicated Lanes. China J. Highw. Transp. 2022, 35, 13. [Google Scholar]
- Yang, S.; Du, M.; Chen, Q. Impact of connected and autonomous vehicles on traffic efficiency and safety of an on-ramp. Simul. Model. Pract. Theory 2021, 113, 102374. [Google Scholar] [CrossRef]
- Mostafizi, A.; Koll, C.; Wang, H. A Decentralized and Coordinated Routing Algorithm for Connected and Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13. [Google Scholar] [CrossRef]
- Arvin, R.; Khattak, A.J.; Kamrani, M.; Rio-Torres, J. Safety evaluation of connected and automated vehicles in mixed traffic with conventional vehicles at intersections. J. Intell. Transp. Syst. 2020, 25, 170–187. [Google Scholar] [CrossRef]
- Song, M.; Chen, F. The influence of autonomous vehicles on asphalt pavement’s service life and maintenance cost. China J. Highw. Transp. 2022, 1–15. Available online: http://kns.cnki.net/kcms/detail/61.1313.U.20211109.1553.004.html (accessed on 1 July 2022).
- Deng, X.; Huang, X. Principles and Design Methods of Pavement; China Communication Press: Beijing, China, 2001. [Google Scholar]
- Zhao, Y.; Wang, G.; Wang, Z. Measurement and analysis of lateral distribution factor on asphalt pavement. J. Tongji Univ. (Nat. Sci.) 2022, 40, 4. [Google Scholar]
- Deng, K. Anomaly Detection of Highway Vehicle Trajectory under the Internet of Things Converged with 5G Technology. Complexity 2021, 2021, 9961428. [Google Scholar] [CrossRef]
- Yang, S.; Zheng, H.; Wang, J.; El Kamel, A. A Personalized Human-Like Lane-Changing Trajectory Planning Method for Automated Driving System. IEEE Trans. Veh. Technol. 2021, 70, 6399–6414. [Google Scholar] [CrossRef]
- Palomares-Salas, J.C.; González-De-La-Rosa, J.J.; Agüera-Pérez, A.; Sierra-Fernández, J.M.; Florencias-Oliveros, O. Forecasting PM10 in the Bay of Algeciras Based on Regression Models. Sustainability 2019, 11, 968. [Google Scholar] [CrossRef]
- Cao, Q. Analysis of Vehicle Stability Influenced by Skid Resistance of Asphalt Pavement. Southeast University: Nanjing, China, 2018. [Google Scholar]
- Xinglin, Z.; Jiaxi, G.; Yanmei, Y.; Bohuang, X. Research on vehicle deviation detection system based on GPS-RTK. China Meas. Test 2020, 46, 5. [Google Scholar]
- Pan, D.; Ping, Y. Control strategy of vehicle speed change operation based on hyperbolic function. Electr. Drive Locomot. 2008, 2008, 45–48. [Google Scholar]
- Du, Y. Research on Comfort Evaluation and Prediction Method of Asphalt Pavement Roughness; Beijing University of Technology: Beijing, China, 2011. [Google Scholar]
- Wang, Y.; Wang, X. Comfort evaluation of the passenger car. Railw. Locomot. Car 2000, 3, 1–4+4. [Google Scholar]
- Hubbard, G.; Youcef-Toumi, K. System level control of a hybrid-electric vehicle drivetrain. In Proceedings of the 1997 American Control Conference (Cat. No. 97CH36041), Chicago, IL, USA, 6 June 1997; Volume 1, pp. 641–645. [Google Scholar] [CrossRef]
- National Cooperative Highway Research Program; Transportation Research Board; National Academies of Sciences, Engineering, and Medicine. Guide for Pavement Friction; Transportation Research Board: Washington, DC, USA, 2009. [Google Scholar]




| Technical Characteristic | Test Results | Requirements [29] |
|---|---|---|
| Penetration (25 °C, 100 g, 5 s) (mm) | 69 | 60–80 |
| Softening point (°C) | 48 | 46 |
| Ductility (10 °C, 5 cm/mm) (cm) | 19.5 | 15 |
| Ductility (15 °C, 5 cm/mm) (cm) | 100 | 100 |
| COC (°C) | 284 | 260 |
| Solubility in trichloroethene (%) | 99.8 | 99.5 |
| Index | Apparent Density (g/m3) | Water Absorption (%) | Crush Valve (%) | Percent of Flat and Elongated Particles (%) | Ruggedness (%) |
|---|---|---|---|---|---|
| Requirements | 2.60 | 2.0 | 26.0 | 15 | 12 |
| Results | 2.73 | 1.2 | 22.5 | 12 | 7 |
| Standard Axis | Standard Load P/kN | Tire Grounding Pressure p/MPa | Rectangular Length of Single Wheel Grounding L/cm | Rectangular Width of Single Wheel Grounding B/cm | Center Distance between Two Wheels RL/cm |
|---|---|---|---|---|---|
| BZ-100 | 100 | 0.70 | 22.7 | 15.7 | 31.95 |
| Wheel Track Distribution | Equation | Schematic |
|---|---|---|
| Normal distribution |  | |
| Centralized distribution |  | |
| Uniform distribution at both ends |  | |
| Bimodal Gaussian normal distribution |  | |
| Uniform distribution |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, R.; Liu, S.; He, Y.; Xu, L. Study on Vehicle–Road Interaction for Autonomous Driving. Sustainability 2022, 14, 11693. https://doi.org/10.3390/su141811693
Guo R, Liu S, He Y, Xu L. Study on Vehicle–Road Interaction for Autonomous Driving. Sustainability. 2022; 14(18):11693. https://doi.org/10.3390/su141811693
Chicago/Turabian StyleGuo, Runhua, Siquan Liu, Yulin He, and Li Xu. 2022. "Study on Vehicle–Road Interaction for Autonomous Driving" Sustainability 14, no. 18: 11693. https://doi.org/10.3390/su141811693
APA StyleGuo, R., Liu, S., He, Y., & Xu, L. (2022). Study on Vehicle–Road Interaction for Autonomous Driving. Sustainability, 14(18), 11693. https://doi.org/10.3390/su141811693