
Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
3. Drones and Analytical Instrumentation
3.1. The Role of UAVs in the Air Pollution Monitoring System
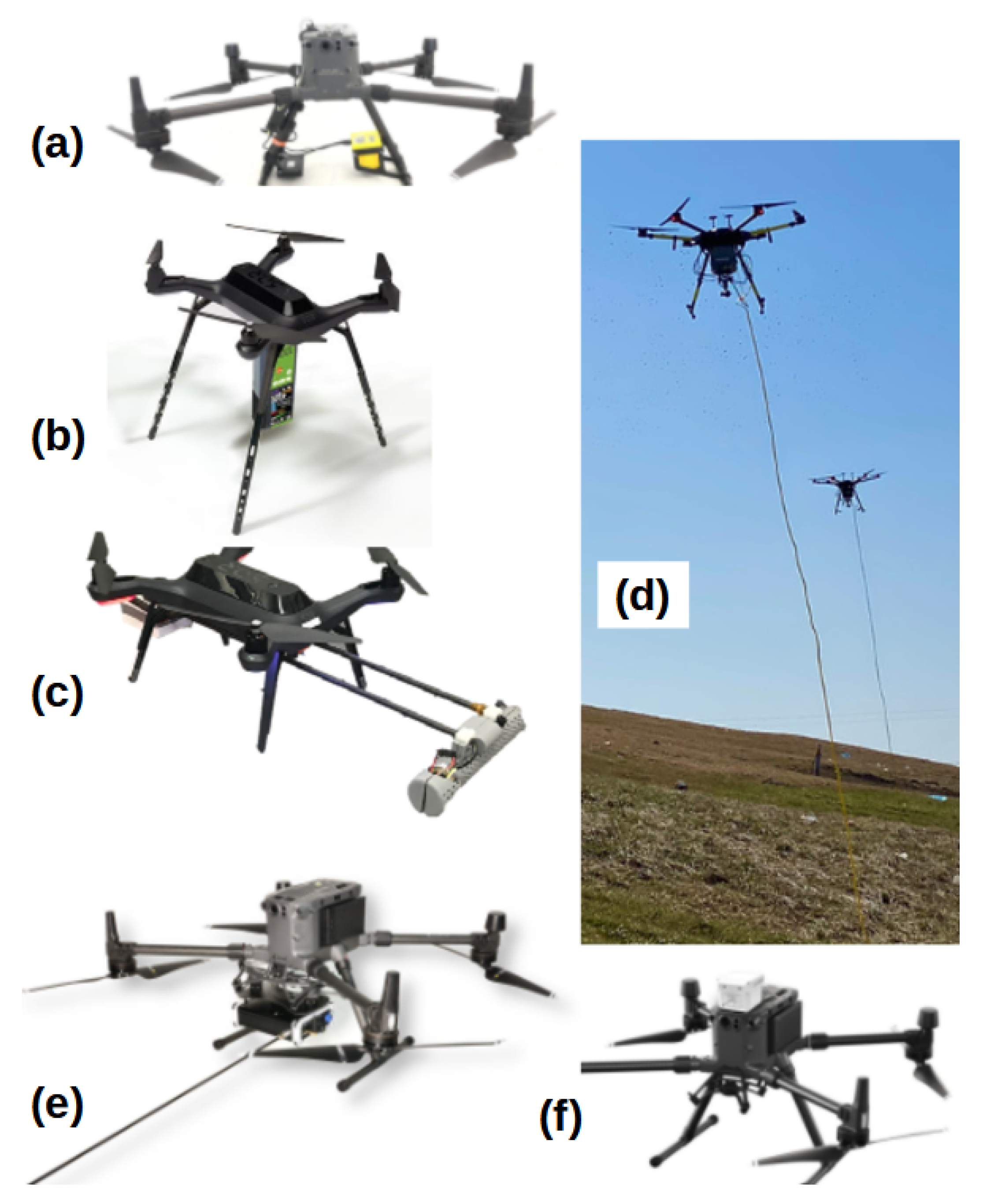
3.2. Types of Drones
3.3. Analytical Instrumentation
3.3.1. Low-Cost Gas Sensors
3.3.2. Multi-Sensor Systems
3.3.3. Electronic Noses
3.3.4. High-Accuracy Optical Gas Analyzers
3.3.5. Optical Particle Counters
3.3.6. Radiation Detectors
3.4. Instrumentation Integration
3.5. Commercially Available Drone-Borne Systems for Environmental Monitoring
4. Selected Applications
4.1. Observation of Natural Atmospheric Pollution
4.2. Urban Air Quality Monitoring
4.3. Monitoring of Pollution Related to Fossil Fuel Mining, Storage, and Transport
4.4. Waste and Wastewater Management
4.5. Agriculture Pollution Monitoring
4.6. Radiation Monitoring
5. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schwikowski, M. Reconstruction of European Air Pollution from Alpine Ice Cores. In Earth Paleoenvironments: Records Preserved in Mid- and Low-Latitude Glaciers; DeWayne Cecil, L., Green, J.R., Thompson, L.G., Eds.; Developments in Paleoenvironmental Research; Springer: Dordrecht, The Netherlands, 2004; pp. 95–119. [Google Scholar] [CrossRef]
- Woźniak, J.; Pactwa, K. Responsible Mining—The Impact of the Mining Industry in Poland on the Quality of Atmospheric Air. Sustainability 2018, 10, 1184. [Google Scholar] [CrossRef]
- Anenberg, S.; Miller, J.; Henze, D.; Minjares, R. A Global Snapshot of the Air Pollution-Related Health Impacts of Transportation Sector Emissions in 2010 and 2015; International Council on Clean Transportation: Washington, DC, USA, 2019. [Google Scholar]
- Jabłońska, M.; Janeczek, J. Identification of industrial point sources of airborne dust particles in an urban environment by a combined mineralogical and meteorological analyses: A case study from the Upper Silesian conurbation, Poland. Atmos. Pollut. Res. 2019, 10, 980–988. [Google Scholar] [CrossRef]
- Apte, K.; Salvi, S. Household air pollution and its effects on health. F1000Research 2016, 5, 2593. [Google Scholar] [CrossRef] [PubMed]
- Trejos, E.M.; Silva, L.F.O.; Hower, J.C.; Flores, E.M.M.; González, C.M.; Pachón, J.E.; Aristizábal, B.H. Volcanic emissions and atmospheric pollution: A study of nanoparticles. Geosci. Front. 2021, 12, 746–755. [Google Scholar] [CrossRef]
- Misiukiewicz, A.; Gao, M.; Filipiak, W.; Cieslak, A.; Patra, A.K.; Szumacher-Strabel, M. Review: Methanogens and methane production in the digestive systems of nonruminant farm animals. Animal 2021, 15, 100060. [Google Scholar] [CrossRef]
- Grewling, Ł.; Bogawski, P.; Kryza, M.; Magyar, D.; Šikoparija, B.; Skjøth, C.A.; Udvardy, O.; Werner, M.; Smith, M. Concomitant occurrence of anthropogenic air pollutants, mineral dust and fungal spores during long-distance transport of ragweed pollen. Environ. Pollut. 2019, 254, 112948. [Google Scholar] [CrossRef]
- Giusti, L. A review of waste management practices and their impact on human health. Waste Manag. 2009, 29, 2227–2239. [Google Scholar] [CrossRef]
- Lou, Z.; Wang, M.; Zhao, Y.; Huang, R. The contribution of biowaste disposal to odor emission from landfills. J. Air Waste Manag. Assoc. 2015, 65, 479–484. [Google Scholar] [CrossRef]
- Sonibare, O.O.; Adeniran, J.A.; Bello, I.S. Landfill air and odour emissions from an integrated waste management facility. J. Environ. Health Sci. Eng. 2019, 17, 13–28. [Google Scholar] [CrossRef]
- Nazar, W.; Niedoszytko, M. Air Pollution in Poland: A 2022 Narrative Review with Focus on Respiratory Diseases. Int. J. Environ. Res. Public Health 2022, 19, 895. [Google Scholar] [CrossRef]
- Moysich, K.B.; Menezes, R.J.; Michalek, A.M. Chernobyl-related ionising radiation exposure and cancer risk: An epidemiological review. Lancet Oncol. 2002, 3, 269–279. [Google Scholar] [CrossRef]
- Likus-Cieślik, J.; Socha, J.; Gruba, P.; Pietrzykowski, M. The current state of environmental pollution with sulfur dioxide (SO2) in Poland based on sulfur concentration in Scots pine needles. Environ. Pollut. 2020, 258, 113559. [Google Scholar] [CrossRef]
- RoyChowdhury, A.; Sarkar, D.; Datta, R. Removal of Acidity and Metals from Acid Mine Drainage-Impacted Water using Industrial Byproducts. Environ. Manag. 2019, 63, 148–158. [Google Scholar] [CrossRef]
- EUR-Lex. Directive 2008/50/EC of the European Parliament and of the Council of 21 May 2008 on Ambient Air Quality and Cleaner Air for Europe; Document 32008L0050; EUR-Lex: Brussels, Belgium, 2008. [Google Scholar]
- World Health Organization, Regional Office for Europe. Air Quality Guidelines: Global Update 2005: Particulate Matter, Ozone, Nitrogen Dioxide and Sulfur Dioxide; World Health Organization, Regional Office for Europe: Geneva, Switzerland, 2006. [Google Scholar]
- Ionel, I.; Popescu, F. Methods for Online Monitoring of Air Pollution Concentration; IntechOpen: Rijeka, Croatia, 2010; Chapter 5. [Google Scholar] [CrossRef]
- Jobert, G.; Barritault, P.; Fournier, M.; Boutami, S.; Jobert, D.; Marchant, A.; Michelot, J.; Monsinjon, P.; Lienhard, P.; Nicoletti, S. Miniature particulate matter counter and analyzer based on lens-free imaging of light scattering signatures with a holed image sensor. Sensors Actuators Rep. 2020, 2, 100010. [Google Scholar] [CrossRef]
- Liu, L.J.S.; Slaughter, J.C.; Larson, T.V. Comparison of Light Scattering Devices and Impactors for Particulate Measurements in Indoor, Outdoor, and Personal Environments. Environ. Sci. Technol. 2002, 36, 2977–2986. [Google Scholar] [CrossRef]
- Diharja, R.; Rivai, M.; Mujiono, T.; Pirngadi, H. Carbon Monoxide Sensor Based on Non-Dispersive Infrared Principle. J. Phys. Conf. Ser. 2019, 1201, 012012. [Google Scholar] [CrossRef]
- Alam, M.S.; Crilley, L.R.; Lee, J.D.; Kramer, L.J.; Pfrang, C.; Vázquez-Moreno, M.; Ródenas, M.; Muñoz, A.; Bloss, W.J. Interference from alkenes in chemiluminescent NOx measurements. Atmos. Meas. Tech. 2020, 13, 5977–5991. [Google Scholar] [CrossRef]
- Pang, X.; Shaw, M.D.; Lewis, A.C.; Carpenter, L.J.; Batchellier, T. Electrochemical ozone sensors: A miniaturised alternative for ozone measurements in laboratory experiments and air-quality monitoring. Sens. Actuators B Chem. 2017, 240, 829–837. [Google Scholar] [CrossRef]
- Weng, W.; Aldén, M.; Li, Z. Quantitative SO2 Detection in Combustion Environments Using Broad Band Ultraviolet Absorption and Laser-Induced Fluorescence. Anal. Chem. 2019, 91, 10849–10855. [Google Scholar] [CrossRef]
- Varlet, V.; Giuliani, N.; Palmiere, C.; Maujean, G.; Augsburger, M. Hydrogen sulfide measurement by headspace-gas chromatography-mass spectrometry (HS-GC-MS): Application to gaseous samples and gas dissolved in muscle. J. Anal. Toxicol. 2015, 39, 52–57. [Google Scholar] [CrossRef]
- Even, M.; Juritsch, E.; Richter, M. Measurement of very volatile organic compounds (VVOCs) in indoor air by sorbent-based active sampling: Identifying the gaps towards standardisation. TrAC Trends Anal. Chem. 2021, 140, 116265. [Google Scholar] [CrossRef]
- Ahmad, M.I.; Ab Rahim, M.H.; Nordin, R.; Mohamed, F.; Abu-Samah, A.; Abdullah, N.F. Ionizing Radiation Monitoring Technology at the Verge of Internet of Things. Sensors 2021, 21, 7629. [Google Scholar] [CrossRef]
- EN 13725:2003; Air Quality—Determination of Odour Concentration by Dynamic Olfactometry. European Committee for Standardization: Brussels, Belgium, 2003.
- Bax, C.; Sironi, S.; Capelli, L. How Can Odors Be Measured? An Overview of Methods and Their Applications. Atmosphere 2020, 11, 92. [Google Scholar] [CrossRef]
- Jońca, J.; Pawnuk, M.; Arsen, A.; Sówka, I. Electronic Noses and Their Applications for Sensory and Analytical Measurements in the Waste Management Plants—A Review. Sensors 2022, 22, 1510. [Google Scholar] [CrossRef]
- Szulczyński, B.; Wasilewski, T.; Wojnowski, W.; Majchrzak, T.; Dymerski, T.; Namieśnik, J.; Gębicki, J. Different Ways to Apply a Measurement Instrument of E-Nose Type to Evaluate Ambient Air Quality with Respect to Odour Nuisance in a Vicinity of Municipal Processing Plants. Sensors 2017, 17, 2671. [Google Scholar] [CrossRef] [PubMed]
- Karagulian, F.; Barbiere, M.; Kotsev, A.; Gerboles, M.; Lagler, F.; Borowiak, A. Review of Sensors for Air Quality Monitoring; Publications Office of the European Union: Luxembourg, 2019; ISBN 9789276092551. [Google Scholar]
- Oleniacz, R.; Gorzelnik, T. Assessment of the Variability of Air Pollutant Concentrations at Industrial, Traffic and Urban Background Stations in Krakow (Poland) Using Statistical Methods. Sustainability 2021, 13, 5623. [Google Scholar] [CrossRef]
- Badura, M.; Sówka, I.; Szymański, P.; Batog, P. Assessing the usefulness of dense sensor network for PM2.5 monitoring on an academic campus area. Sci. Total Environ. 2020, 722, 137867. [Google Scholar] [CrossRef]
- Sówka, I.; Badura, M.; Pawnuk, M.; Szymański, P.; Batog, P. The use of the GIS tools in the analysis of air quality on the selected University campus in Poland. Arch. Environ. Prot. 2020, 46, 100–106. [Google Scholar] [CrossRef]
- Solomon, P.A.; Vallano, D.; Lunden, M.; LaFranchi, B.; Blanchard, C.L.; Shaw, S.L. Mobile-platform measurement of air pollutant concentrations in California: Performance assessment, statistical methods for evaluating spatial variations, and spatial representativeness. Atmos. Meas. Tech. 2020, 13, 3277–3301. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Daponte, P.; Vito, L.D.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012022. [Google Scholar] [CrossRef]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P.V. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef] [PubMed]
- Singh, D.; Dahiya, M.K.R.; Nanda, C. Sensors and systems for air quality assessment monitoring and management: A review. J. Environ. Manag. 2021, 289, 112510. [Google Scholar] [CrossRef]
- Yi, W.Y.; Lo, K.M.; Mak, T.; Leung, K.S.; Leung, Y.; Meng, M.L. A Survey of Wireless Sensor Network Based Air Pollution Monitoring Systems. Sensors 2015, 15, 31392–31427. [Google Scholar] [CrossRef]
- Rohi, G.; Ejofodomi, O.; Ofualagba, G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones. Heliyon 2020, 6, e03252. [Google Scholar] [CrossRef]
- Schneising, O.; Buchwitz, M.; Reuter, M.; Bovensmann, H.; Burrows, J.P.; Borsdorff, T.; Deutscher, N.M.; Feist, D.G.; Griffith, D.W.T.; Hase, F.; et al. A scientific algorithm to simultaneously retrieve carbon monoxide and methane from TROPOMI onboard Sentinel-5 Precursor. Atmos. Meas. Tech. 2019, 12, 6771–6802. [Google Scholar] [CrossRef]
- Brauer, M.; Guttikunda, S.K.; K A, N.; Dey, S.; Tripathi, S.N.; Weagle, C.; Martin, R.V. Examination of monitoring approaches for ambient air pollution: A case study for India. Atmos. Environ. 2016, 216, 116940. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef]
- Boon, M.A.; Drijfhout, A.P.; Tesfamichael, S. Comparison of a fixed-wing and multi-rotor uav for environmental mapping applications: A case study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2-W6, 47–54. [Google Scholar] [CrossRef]
- Ducard, G.J.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, H.; Liu, Y. An evaluative review of the VTOL technologies for unmanned and manned aerial vehicles. Comput. Commun. 2020, 149, 356–369. [Google Scholar] [CrossRef]
- Lee, C.; Kim, S.; Chu, B. A Survey: Flight Mechanism and Mechanical Structure of the UAV. Int. J. Precis. Eng. Manuf. 2021, 22, 719–743. [Google Scholar] [CrossRef]
- Ito, S.; Akaiwa, K.; Funabashi, Y.; Nishikawa, H.; Kong, X.; Taniguchi, I.; Tomiyama, H. Load and Wind Aware Routing of Delivery Drones. Drones 2022, 6, 50. [Google Scholar] [CrossRef]
- Kaliszewski, M.; Włodarski, M.; Młyńczak, J.; Jankiewicz, B.; Auer, L.; Bartosewicz, B.; Liszewska, M.; Budner, B.; Szala, M.; Schneider, B.; et al. The Multi-Gas Sensor for Remote UAV and UGV Missions—Development and Tests. Sensors 2021, 21, 7608. [Google Scholar] [CrossRef]
- Madokoro, H.; Kiguchi, O.; Nagayoshi, T.; Chiba, T.; Inoue, M.; Chiyonobu, S.; Nix, S.; Woo, H.; Sato, K. Development of Drone-Mounted Multiple Sensing System with Advanced Mobility for In Situ Atmospheric Measurement: A Case Study Focusing on PM2.5 Local Distribution. Sensors 2021, 21, 4881. [Google Scholar] [CrossRef]
- Villa, T.F.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and Validation of a UAV Based System for Air Pollution Measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef]
- Burgués, J.; Esclapez, M.D.; Doñate, S.; Marco, S. RHINOS: A lightweight portable electronic nose for real-time odor quantification in wastewater treatment plants. iScience 2021, 24, 103371. [Google Scholar] [CrossRef]
- Muzirafuti, A.; Cascio, M.L.S.; Randazzo, G. UAV Photogrammetry-Based Mapping of the Pocket Beaches of Isola Bella Bay, Taormina (Eastern Sicily). In Proceedings of the 2021 International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Reggio Calabria, Italy, 4–6 October 2021; pp. 418–422. [Google Scholar] [CrossRef]
- Bono, A.; D’Alfonso, L.F.G.F.A.; Natalizio, E. Path Planning and Control of a UAV Fleet in Bridge Management Systems. Remote Sens. 2022, 8, 1858. [Google Scholar] [CrossRef]
- Szulczyński, B.; Gębicki, J. Currently Commercially Available Chemical Sensors Employed for Detection of Volatile Organic Compounds in Outdoor and Indoor Air. Environments 2017, 4, 21. [Google Scholar] [CrossRef]
- Hanafi, R.; Mayasari, R.D.; Masmui; Agustanhakri; Raharjo, J.; Nuryadi, R. Electrochemical sensor for environmental monitoring system: A review. AIP Conf. Proc. 2019, 2169, 030007. [Google Scholar] [CrossRef]
- Dey, A. Semiconductor metal oxide gas sensors: A review. Mater. Sci. Eng. B 2018, 229, 206–217. [Google Scholar] [CrossRef]
- Yaqoob, U.; Younis, M.I. Chemical Gas Sensors: Recent Developments, Challenges, and the Potential of Machine Learning—A Review. Sensors 2021, 21, 2877. [Google Scholar] [CrossRef] [PubMed]
- Williams, D.E. Electrochemical sensors for environmental gas analysis. Curr. Opin. Electrochem. 2020, 22, 145–153. [Google Scholar] [CrossRef]
- Popoola, O.A.M.; Stewart, G.B.; Mead, M.I.; Jones, R.L. Development of a baseline-temperature correction methodology for electrochemical sensors and its implications for long-term stability. Atmos. Environ. 2016, 147, 330–343. [Google Scholar] [CrossRef]
- Laref, R.; Losson, E.; Sava, A.; Siadat, M. Empiric Unsupervised Drifts Correction Method of Electrochemical Sensors for in Field Nitrogen Dioxide Monitoring. Sensors 2021, 21, 3581. [Google Scholar] [CrossRef]
- Liang, Y.; Wu, C.; Jiang, S.; Li, Y.J.; Wu, D.; Li, M.; Cheng, P.; Yang, W.; Cheng, C.; Li, L.; et al. Field comparison of electrochemical gas sensor data correction algorithms for ambient air measurements. Sens. Actuators B Chem. 2021, 327, 128897. [Google Scholar] [CrossRef]
- Saruhan, B.; Lontio Fomekong, R.; Nahirniak, S. Review: Influences of Semiconductor Metal Oxide Properties on Gas Sensing Characteristics. Front. Sens. 2021, 2, 657931. [Google Scholar] [CrossRef]
- Nikolic, M.V.; Milovanovic, V.; Vasiljevic, Z.Z.; Stamenkovic, Z. Semiconductor Gas Sensors: Materials, Technology, Design, and Application. Sensors 2020, 20, 6694. [Google Scholar] [CrossRef]
- Cheng, L.; Meng, Q.H.; Lilienthal, A.J.; Qi, P.F. Development of compact electronic noses: A review. Meas. Sci. Technol. 2021, 32, 062002. [Google Scholar] [CrossRef]
- Jońca, J.; Ryzhikov, A.; Kahn, M.L.; Fajerwerg, K.; Chapelle, A.; Menini, P.; Fau, P. SnO2 “Russian Doll” Octahedra Prepared by Metalorganic Synthesis: A New Structure for Sub-ppm CO Detection. Chem.— Eur. J. 2016, 22, 10127–10135. [Google Scholar] [CrossRef]
- Sendi, A.; Fau, P.; Fajerwerg, K.; Kahn, M.; Menini, P. Detection and Discrimination of Formaldehyde with CuO/SnO2 dual layers MOS Gas Sensors Operated with a Pulsed Temperature Modulation. In Proceedings of the 6th International Conference on Sensors and Electronic Instrumentation Advances (SEIA’ 2020), Porto, Portugal, 23–25 September 2020. [Google Scholar]
- Jońca, J.; Harmel, J.; Joanny, L.; Ryzhikov, A.; Kahn, M.L.; Fau, P.; Chaudret, B.; Fajerwerg, K. Au/MOx (M = Zn, Ti) nanocomposites as highly efficient catalytic filters for chemical gas sensing at room temperature and in humid atmosphere. Sens. Actuators B Chem. 2017, 249, 357–363. [Google Scholar] [CrossRef]
- Liu, H.; Chu, R.; Tang, Z. Metal Oxide Gas Sensor Drift Compensation Using a Two-Dimensional Classifier Ensemble. Sensors 2015, 15, 10180–10193. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, C.; Zheng, B.; Geng, X.; Debliquy, M. Hydrogen sensors based on noble metal doped metal-oxide semiconductor: A review. Int. J. Hydrog. Energy 2017, 42, 20386–20397. [Google Scholar] [CrossRef]
- Dinh, T.V.; Choi, I.Y.; Son, Y.S.; Kim, J.C. A review on non-dispersive infrared gas sensors: Improvement of sensor detection limit and interference correction. Sens. Actuators B Chem. 2016, 231, 529–538. [Google Scholar] [CrossRef]
- Aleixandre, M.; Gerboles, M. Review of Small Commercial Sensors for Indicative Monitoring of Ambient Gas. Chem. Eng. Trans. 2012, 30, 169–174. [Google Scholar] [CrossRef]
- Spinelle, L.; Gerboles, M.; Kok, G.; Persijn, S.; Sauerwald, T. Review of Portable and Low-Cost Sensors for the Ambient Air Monitoring of Benzene and Other Volatile Organic Compounds. Sensors 2017, 17, 1520. [Google Scholar] [CrossRef]
- Xu, R. Light scattering: A review of particle characterization applications. Particuology 2015, 18, 11–21. [Google Scholar] [CrossRef]
- Galle, B.; Arellano, S.; Bobrowski, N.; Conde, V.; Fischer, T.P.; Gerdes, G.; Gutmann, A.; Hoffmann, T.; Itikarai, I.; Krejci, T.; et al. A multi-purpose, multi-rotor drone system for long-range and high-altitude volcanic gas plume measurements. Atmos. Meas. Tech. 2021, 14, 4255–4277. [Google Scholar] [CrossRef]
- Burgués, J.; Esclapez, M.D.; Doñate, S.; Pastor, L.; Marco, S. Aerial Mapping of Odorous Gases in a Wastewater Treatment Plant Using a Small Drone. Remote Sens. 2021, 13, 1757. [Google Scholar] [CrossRef]
- De Fazio, R.; Dinoi, L.M.; De Vittorio, M.; Visconti, P. A Sensor-Based Drone for Pollutants Detection in Eco-Friendly Cities: Hardware Design and Data Analysis Application. Electronics 2022, 11, 52. [Google Scholar] [CrossRef]
- Zhou, Z.B.; He, B.S.; Feng, L.D.; Cai, N.C. Multi-sensor technique and solid-state electrochemical sensor system for real-time and dynamic monitoring of multi-component gases. Sens. Actuators B Chem. 2005, 108, 379–383. [Google Scholar] [CrossRef]
- Dong, M.; Zheng, C.; Miao, S.; Zhang, Y.; Du, Q.; Wang, Y.; Tittel, F.K. Development and Measurements of a Mid-Infrared Multi-Gas Sensor System for CO, CO2 and CH4 Detection. Sensors 2017, 17, 2221. [Google Scholar] [CrossRef]
- Karakaya, D.; Ulucan, O.; Turkan, M. Electronic Nose and Its Applications: A Survey. Int. J. Autom. Comput. 2020, 17, 179–209. [Google Scholar] [CrossRef]
- Kim, Y.W.; Park, H.B.; Lee, I.S.; Cho, J.H. Portable Electronic Nose System for Identification of Synthesized Gasoline Using Metal Oxide Gas Sensor and Pattern Recognition. AIP Conf. Proc. 2011, 1362, 113–114. [Google Scholar] [CrossRef]
- Majchrzak, T.; Wojnowski, W.; Dymerski, T.; Gębicki, J.; Namieśnik, J. Electronic noses in classification and quality control of edible oils: A review. Food Chem. 2018, 246, 192–201. [Google Scholar] [CrossRef]
- Wojnowski, W.; Majchrzak, T.; Dymerski, T.; Gębicki, J.; Namieśnik, J. Electronic noses: Powerful tools in meat quality assessment. Meat Sci. 2017, 131, 119–131. [Google Scholar] [CrossRef]
- Seesaard, T.; Goel, N.; Kumar, M.; Wongchoosuk, C. Advances in gas sensors and electronic nose technologies for agricultural cycle applications. Comput. Electron. Agric. 2022, 193, 106673. [Google Scholar] [CrossRef]
- Dobrzyniewski, D.; Szulczyński, B.; Dymerski, T.; Gębicki, J. Development of Gas Sensor Array for Methane Reforming Process Monitoring. Sensors 2021, 21, 4983. [Google Scholar] [CrossRef]
- Farraia, M.V.; Cavaleiro Rufo, J.; Paciência, I.; Mendes, F.; Delgado, L.; Moreira, A. The electronic nose technology in clinical diagnosis: A systematic review. Porto Biomed. J. 2019, 4, e42. [Google Scholar] [CrossRef]
- Voss, A.; Witt, K.; Kaschowitz, T.; Poitz, W.; Ebert, A.; Roser, P.; Bär, K.J. Detecting Cannabis Use on the Human Skin Surface via an Electronic Nose System. Sensors 2014, 14, 13256–13272. [Google Scholar] [CrossRef] [PubMed]
- Wasilewski, T.; Gębicki, J.; Kamysz, W. Bio-inspired approaches for explosives detection. TrAC Trends Anal. Chem. 2021, 142, 116330. [Google Scholar] [CrossRef]
- Chen, Y.T.; Samborsky, Z.; Shrestha, S. Electronic nose for ambient detection and monitoring. In Proceedings of the Advanced Environmental, Chemical, and Biological Sensing Technologies XIV, SPIE, Anaheim, CA, USA, 9–10 April 2017; Volume 10215, pp. 73–81. [Google Scholar] [CrossRef]
- Wilson, A.D. Review of Electronic-nose Technologies and Algorithms to Detect Hazardous Chemicals in the Environment. Procedia Technol. 2012, 1, 453–463. [Google Scholar] [CrossRef]
- John, A.T.; Murugappan, K.; Nisbet, D.R.; Tricoli, A. An Outlook of Recent Advances in Chemiresistive Sensor-Based Electronic Nose Systems for Food Quality and Environmental Monitoring. Sensors 2021, 21, 2271. [Google Scholar] [CrossRef]
- Romain, A.C.; Nicolas, J. Long term stability of metal oxide-based gas sensors for e-nose environmental applications: An overview. Sens. Actuators B Chem. 2010, 146, 502–506. [Google Scholar] [CrossRef]
- Cao, J.; Liu, T.; Chen, J.; Yang, T.; Zhu, X.; Wang, H. Drift Compensation on Massive Online Electronic-Nose Responses. Chemosensors 2021, 9, 78. [Google Scholar] [CrossRef]
- Zhu, X.; Yao, S.; Ren, W.; Lu, Z.; Li, Z. TDLAS Monitoring of Carbon Dioxide with Temperature Compensation in Power Plant Exhausts. Appl. Sci. 2019, 9, 442. [Google Scholar] [CrossRef]
- Rudnitskaya, A. Calibration Update and Drift Correction for Electronic Noses and Tongues. Front. Chem. 2018, 6, 433. [Google Scholar] [CrossRef]
- Lin, S.; Chang, J.; Sun, J.; Xu, P. Improvement of the Detection Sensitivity for Tunable Diode Laser Absorption Spectroscopy: A Review. Front. Phys. 2022, 10, 853966. [Google Scholar] [CrossRef]
- Detto, M.; Verfaillie, J.; Anderson, F.; Xu, L.; Baldocchi, D. Comparing laser-based open- and closed-path gas analyzers to measure methane fluxes using the eddy covariance method. Agric. For. Meteorol. 2011, 151, 1312–1324. [Google Scholar] [CrossRef]
- Bonow, G.; Kroll, A. Gas leak localization in industrial environments using a TDLAS-based remote gas sensor and autonomous mobile robot with the Tri-Max method. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 987–992. [Google Scholar] [CrossRef]
- Weng, W.; Aldén, M.; Li, Z. Simultaneous Quantitative Detection of HCN and C2H2 in Combustion Environment Using TDLAS. Processes 2021, 9, 2033. [Google Scholar] [CrossRef]
- Frish, M.B.; Wainner, R.T.; Laderer, M.C.; Allen, M.G.; Rutherford, J.; Wehnert, P.; Dey, S.; Gilchrist, J.; Corbi, R.; Picciaia, D.; et al. Low-cost lightweight airborne laser-based sensors for pipeline leak detection and reporting. In Proceedings of the Next-Generation Spectroscopic Technologies VI, SPIE, Baltimore, MD, USA, 29 April–3 May 2013; Volume 8726, pp. 56–64. [Google Scholar] [CrossRef]
- Shao, L.; Mei, J.; Chen, J.; Tan, T.; Wang, G.; Liu, K.; Gao, X. Recent advances and applications of off-axis integrated cavity output spectroscopy. Microw. Opt. Technol. Lett. 2022, 1–17. [Google Scholar] [CrossRef]
- Gadedjisso-Tossou, K.S.; Stoychev, L.I.; Mohou, M.A.; Cabrera, H.; Niemela, J.; Danailov, M.B.; Vacchi, A. Cavity Ring-Down Spectroscopy for Molecular Trace Gas Detection Using A Pulsed DFB QCL Emitting at 6.8 µm. Photonics 2020, 7, 74. [Google Scholar] [CrossRef]
- Martinez, B.; Miller, T.W.; Yalin, A.P. Cavity Ring-Down Methane Sensor for Small Unmanned Aerial Systems. Sensors 2020, 20, 454. [Google Scholar] [CrossRef]
- Meeting the Global Methane Pledge How Leak Detection Technology Can Cut Methane Emissions, ABB Inc. Measurement & Analytics, White Paper. Available online: www.abb.com/analytical (accessed on 14 July 2022).
- Lottanzio, L. Particulate Matter Sensing for Air Quality Measurements, Sensirion, The Sensor Company. Available online: www.sensirion.com (accessed on 14 July 2022).
- Molaie, S.; Lino, P. Review of the Newly Developed, Mobile Optical Sensors for Real-Time Measurement of the Atmospheric Particulate Matter Concentration. Micromachines 2021, 12, 416. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, T.; Lee, W. Radiation measurement and imaging using 3D position sensitive pixelated CZT detector. Nucl. Eng. Technol. 2019, 51, 1417–1427. [Google Scholar] [CrossRef]
- Milbrath, B.; Peurrung, A.; Bliss, M.; Weber, W. Radiation detector materials: An overview. J. Mater. Res. 2008, 23, 2561–2581. [Google Scholar] [CrossRef]
- Povinec, P.P. Developments in radioanalytics: From Geiger counters to single atom counting. J. Radioanal. Nucl. Chem. 2018, 318, 1573–1585. [Google Scholar] [CrossRef]
- Fitzgerald, R.; Bergeron, D.E.; Giblin, S.P.; Jarrett, D.G.; Judge, S.M.; Michotte, C.; Scherer, H.; Zimmerman, N.M. The next generation of current measurement for ionization chambers. Appl. Radiat. Isot. 2020, 163, 109216. [Google Scholar] [CrossRef]
- Yanagida, T. Inorganic scintillating materials and scintillation detectors. Proc. Jpn. Acad. Ser. B 2018, 94, 75–97. [Google Scholar] [CrossRef]
- Knoll, G.; McGregor, D. Fundamentals of Semiconductor Detectors for Ionizing Radiation. MRS Online Proc. Libr. 1993, 302, 3–17. [Google Scholar] [CrossRef]
- Nikl, M.; Yoshikawa, A. Recent R & D Trends in Inorganic Single-Crystal Scintillator Materials for Radiation Detection. Adv. Opt. Mater. 2015, 3, 463–481. [Google Scholar] [CrossRef]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Hollenbeck, D.; Dahabra, M.; Christensen, L.E.; Chen, Y. Data Quality Aware Flight Mission Design for Fugitive Methane Sniffing using Fixed Wing sUAS. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 813–818. [Google Scholar] [CrossRef]
- Barchyn, T.E.; Hugenholtz, C.H.; Fox, T.A. Plume detection modeling of a drone-based natural gas leak detection system. Elem. Sci. Anthr. 2019, 7, 41. [Google Scholar] [CrossRef]
- Hutchinson, M.; Liu, C.; Chen, W.H. Source term estimation of a hazardous airborne release using an unmanned aerial vehicle. J. Field Robot. 2019, 36, 797–817. [Google Scholar] [CrossRef]
- Oberle, F.K.J.; Gibbs, A.E.; Richmond, B.M.; Erikson, L.H.; Waldrop, M.P.; Swarzenski, P.W. Towards determining spatial methane distribution on Arctic permafrost bluffs with an unmanned aerial system. SN Appl. Sci. 2019, 1, 236. [Google Scholar] [CrossRef]
- Smith, B.J.; John, G.; Christensen, L.E.; Chen, Y. Fugitive methane leak detection using sUAS and miniature laser spectrometer payload: System, application and groundtruthing tests. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 369–374. [Google Scholar] [CrossRef]
- Cichowicz, R.; Dobrzański, M. Modeling Pollutant Emissions: Influence of Two Heat and Power Plants on Urban Air Quality. Energies 2021, 14, 5218. [Google Scholar] [CrossRef]
- Koval, A.; Irigoyen, E.; Koval, T.A.R. Drone as a platform for measurements. In Proceedings of the 2017 IEEE 37th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, UKraine, 18–20 April 2017; pp. 424–427. [Google Scholar] [CrossRef]
- Takei, Y.; Kanazawa, Y.; Hirasawa, K.; Nanto, H. Development of 3D gas source localization using multi-copter with gas sensor array. In Proceedings of the 2019 IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Fukuoka, Japan, 26–29 May 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Burgués, J.; Hernández, V.; Lilienthal, A.J.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Mapping. Sensors 2019, 19, 478. [Google Scholar] [CrossRef]
- Scheller, J.H.; Mastepanov, M.; Christensen, T.R. Toward UAV-based methane emission mapping of Arctic terrestrial ecosystems. Sci. Total Environ. 2022, 819, 153161. [Google Scholar] [CrossRef]
- Rüdiger, J.; Tirpitz, J.L.; de Moor, J.M.; Bobrowski, N.; Gutmann, A.; Liuzzo, M.; Ibarra, M.; Hoffmann, T. Implementation of electrochemical, optical and denuder-based sensors and sampling techniques on UAV for volcanic gas measurements: Examples from Masaya, Turrialba and Stromboli volcanoes. Atmos. Meas. Tech. 2018, 11, 2441–2457. [Google Scholar] [CrossRef]
- Liu, E.J.; Wood, K.; Mason, E.; Edmonds, M.; Aiuppa, A.; Giudice, G.; Bitetto, M.; Francofonte, V.; Burrow, S.; Richardson, T.; et al. Dynamics of Outgassing and Plume Transport Revealed by Proximal Unmanned Aerial System (UAS) Measurements at Volcán Villarrica, Chile. Geochem. Geophys. Geosyst. 2019, 20, 730–750. [Google Scholar] [CrossRef]
- Shingubara, R.; Tsunogai, U.; Ito, M.; Nakagawa, F.; Yoshikawa, S.; Utsugi, M.; Yokoo, A. Development of a drone-borne volcanic plume sampler. J. Volcanol. Geotherm. Res. 2021, 412, 107197. [Google Scholar] [CrossRef]
- Sasaki, K.; Inoue, M.; Shimura, T.; Iguchi, M. In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas. Atmosphere 2021, 12, 376. [Google Scholar] [CrossRef]
- Zhou, X.; Aurell, J.; Mitchell, W.; Tabor, D.; Gullett, B. A small, lightweight multipollutant sensor system for ground-mobile and aerial emission sampling from open area sources. Atmos. Environ. 2017, 154, 31–41. [Google Scholar] [CrossRef]
- Aurell, J.; Gullett, B.; Holder, A.; Kiros, F.; Mitchell, W.; Watts, A.; Ottmar, R. Wildland fire emission sampling at Fishlake National Forest, Utah using an unmanned aircraft system. Atmos. Environ. 2021, 247, 118193. [Google Scholar] [CrossRef]
- Jumaah, H.J.; Kalantar, B.; Halin, A.A.; Mansor, S.; Ueda, N.; Jumaah, S.J. Development of UAV-Based PM2.5 Monitoring System. Drones 2021, 5, 60. [Google Scholar] [CrossRef]
- Chodorek, A.; Chodorek, R.R.; Yastrebov, A. The Prototype Monitoring System for Pollution Sensing and Online Visualization with the Use of a UAV and a WebRTC-Based Platform. Sensors 2022, 22, 1578. [Google Scholar] [CrossRef]
- Samad, A.; Alvarez Florez, D.; Chourdakis, I.; Vogt, U. Concept of Using an Unmanned Aerial Vehicle (UAV) for 3D Investigation of Air Quality in the Atmosphere—Example of Measurements Near a Roadside. Atmosphere 2022, 13, 663. [Google Scholar] [CrossRef]
- Cichowicz, R.; Dobrzański, M. Spatial Analysis (Measurements at Heights of 10 m and 20 m above Ground Level) of the Concentrations of Particulate Matter (PM10, PM2.5, and PM1.0) and Gaseous Pollutants (H2S) on the University Campus: A Case Study. Atmosphere 2021, 12, 62. [Google Scholar] [CrossRef]
- Cichowicz, R.; Dobrzański, M. 3D Spatial Analysis of Particulate Matter (PM10, PM2.5 and PM1.0) and Gaseous Pollutants (H2S, SO2 and VOC) in Urban Areas Surrounding a Large Heat and Power Plant. Energies 2021, 14, 4070. [Google Scholar] [CrossRef]
- Alvarado, M.; Gonzalez, F.; Erskine, P.; Cliff, D.; Heuff, D. A Methodology to Monitor Airborne PM10 Dust Particles Using a Small Unmanned Aerial Vehicle. Sensors 2017, 17, 343. [Google Scholar] [CrossRef] [PubMed]
- Andersen, T.; Vinkovic, K.; de Vries, M.; Kers, B.; Necki, J.; Swolkien, J.; Roiger, A.; Peters, W.; Chen, H. Quantifying methane emissions from coal mining ventilation shafts using an unmanned aerial vehicle (UAV)-based active AirCore system. Atmos. Environ. X 2021, 12, 100135. [Google Scholar] [CrossRef]
- Iwaszenko, S.; Kalisz, P.; Słota, M.; Rudzki, A. Detection of Natural Gas Leakages Using a Laser-Based Methane Sensor and UAV. Remote Sens. 2021, 13, 510. [Google Scholar] [CrossRef]
- Tannant, D.; Smith, K.; Cahill, A.; Hawthorne, I.; Forde, O.; Black, A.; Beckie, R. Evaluation of a Drone and Laser-Based Methane Sensor for Detection of Fugitive Methane Emissions DRAFT Submitted to BC Oil and Gas Research and Innovation Society; University of British Columbia: Vancouver, BC, Canada, 2018. [Google Scholar]
- Tosato, P.; Facinelli, D.; Prada, M.; Gemma, L.; Rossi, M.; Brunelli, D. An Autonomous Swarm of Drones for Industrial Gas Sensing Applications. In Proceedings of the 2019 IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Washington, DC, USA, 10–12 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Montoya, J.M.; Olsson, A.; Mårtensson, S.G.; Chilo, J. Drone Gas Concentration Measurement System for Landfills. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Daugėla, I.; Visockiene, J.S.; Kumpiene, J. Detection and analysis of methane emissions from a landfill using unmanned aerial drone systems and semiconductor sensors. Detritus 2020, 10, 127–138. [Google Scholar] [CrossRef]
- Gålfalk, M.; Nilsson Påledal, S.; Bastviken, D. Sensitive Drone Mapping of Methane Emissions without the Need for Supplementary Ground-Based Measurements. ACS Earth Space Chem. 2021, 5, 2668–2676. [Google Scholar] [CrossRef]
- Aneja, V.P.; Schlesinger, W.H.; Erisman, J.W. Effects of Agriculture upon the Air Quality and Climate: Research, Policy, and Regulations. Environ. Sci. Technol. 2009, 43, 4234–4240. [Google Scholar] [CrossRef]
- Araujo, J.O.; Valente, J.; Kooistra, L.; Munniks, S.; Peters, R.J.B. Experimental Flight Patterns Evaluation for a UAV-Based Air Pollutant Sensor. Micromachines 2020, 11, 768. [Google Scholar] [CrossRef]
- Pobkrut, T.; Eamsa-ard, T.; Kerdcharoen, T. Sensor drone for aerial odor mapping for agriculture and security services. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Camarillo-Escobedo, R.; Flores, J.L.; Marin-Montoya, P.; García-Torales, G.; Camarillo-Escobedo, J.M. Smart Multi-Sensor System for Remote Air Quality Monitoring Using Unmanned Aerial Vehicle and LoRaWAN. Sensors 2022, 22, 1706. [Google Scholar] [CrossRef]
- Habib, M.R.; Baticados, E.J.; Capareda, S.C. Particulate Matter Emissions from Dairy Facilities and Cattle Feedlots in Texas—A Summer Emission Update; ASABE Paper No. 2100355; ASABE: St. Joseph, MI, USA, 2021. [Google Scholar] [CrossRef]
- Vinković, K.; Andersen, T.; de Vries, M.; Kers, B.; van Heuven, S.; Peters, W.; Hensen, A.; van den Bulk, P.; Chen, H. Evaluating the use of an Unmanned Aerial Vehicle (UAV)-based active AirCore system to quantify methane emissions from dairy cows. Sci. Total Environ. 2022, 831, 154898. [Google Scholar] [CrossRef]
- Andersen, T.; Scheeren, B.; Peters, W.; Chen, H. A UAV-based active AirCore system for measurements of greenhouse gases. Atmos. Meas. Tech. 2018, 11, 2683–2699. [Google Scholar] [CrossRef]
- Baeza, J.; Valencia, D.; Baeza, A. Use of Drones for Remote Management of the Close Measure of Radioactivity Sources. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7914–7917. [Google Scholar] [CrossRef]
- Gong, P.; Tang, X.B.; Huang, X.; Wang, P.; Wen, L.S.; Zhu, X.X.; Zhou, C. Locating lost radioactive sources using a UAV radiation monitoring system. Appl. Radiat. Isot. 2019, 150, 1–13. [Google Scholar] [CrossRef]
- Šálek, O.; Matolín, M.; Gryc, L. Mapping of radiation anomalies using UAV mini-airborne gamma-ray spectrometry. J. Environ. Radioact. 2018, 182, 101–107. [Google Scholar] [CrossRef]
- MacFarlane, J.W.; Payton, O.D.; Keatley, A.C.; Scott, G.P.T.; Pullin, H.; Crane, R.A.; Smilion, M.; Popescu, I.; Curlea, V.; Scott, T.B. Lightweight aerial vehicles for monitoring, assessment and mapping of radiation anomalies. J. Environ. Radioact. 2014, 136, 127–130. [Google Scholar] [CrossRef]
- Briechle, S.; Sizov, A.; Tretyak, O.; Antropov, V.; Molitor, N.; Krzystek, P. UAV-based detection of unknown radioactive biomass deposits in chernobyl’s exclusion zone. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 163–169. [Google Scholar] [CrossRef]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Yamashiki, Y.; Scott, T.B. Low altitude unmanned aerial vehicle for characterising remediation effectiveness following the FDNPP accident. J. Environ. Radioact. 2016, 151, 58–63. [Google Scholar] [CrossRef]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. The use of unmanned aerial systems for the mapping of legacy uranium mines. J. Environ. Radioact. 2015, 143, 135–140. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pollutant | Description | Sources | Reference Measurement Method |
|---|---|---|---|
| Particulate matter (e.g., PM10, PM2.5, PM1) | Fine particles freely floating in the air and defined by their diameter: PM10 (<10 µm), PM2.5 (<2.5 µm), PM1 (<1.0 µm) | Anthropological: vehicle engines, wood burning, industrial processes, reactions between atmospheric pollutants, e.g., NOx, VOCs, and NH3 Natural: dust storms, forest wildfires, volcano eruptions | Gravimetric methods [18], photo-detectors [19,20] |
| Carbon monoxide (CO) and dioxide (CO2) | Gases produced during burning of fuels | Anthropological: vehicle engines, waste burning Natural: forest wildfires, volcanoes eruptions, decomposing vegetation and other biomass | Non-dispersive infrared techniques [18,21] |
| Nitrogen oxides (NOx) | A group of reactive gases, including NO and NO2 | Anthropological: vehicle engines, wood burning, and industrial activities (generation of mechanical power and electricity) Natural: biological processes in soil, lightning | Chemiluminescence [18,22] |
| Ammonia (NH3) | A colorless gas with a pungent odor | Anthropological: Agricultural activities | Chemiluminescence [18] |
| Volatile organic compounds (VOCs) | Carbon-containing chemicals that evaporate into the atmosphere at ambient temperature | Anthropological: Transportation, almost all sectors of industry, residential wood combustion, consumer products (solvents, paints, cleaning products), wastes and wastewater Natural: plant and animal respiration and organic decomposition | Gas chromatography with PID and FID detectors [26] |
| Ozone (O3) | Gas composed of three oxygen atoms | Anthropological: Reactions between NOx and VOCs (catalyzed by sunlight) | UV photometry [23] |
| Sulfur dioxide (SO2) | A colorless gas with a pungent odor | Anthropological: marine vessels, petroleum refining, diesel engines Natural: volcanoes eruptions, decomposition of organic matter, sea spray | UV fluorescence [18,24] |
| Hydrogen sulfide (H2S) | A colorless gas with characteristic odor of rotten eggs | Anthropological: oil and natural gas extraction and processing, decomposition of human and animal wastes, sewage treatment
facilities and landfills. Natural: volcanoes, hot springs and underwater thermal vents, bogs and swamps | Gas chromatography with FID detectors [25] |
| Radiation | The emission of high-energy particles which cause ionization. | Anthropological: nuclear accidents,
nuclear explosions, mining of uranium Natural: radioactive decay of radon | Geiger–Muller counter and scintillation survey meters [27] |
| Odors | Odor is caused by volatile compounds that humans and animals can perceive by their sense of smell. | Anthropological: Agriculture and livestock, industrial activities (food, chemical, pharmaceutical), waste and wastewater treatment | Dynamic olfactometry [29] |
| UAV Type | ||
|---|---|---|
 Fixed-wing |  Rotary-wing |  Fixed-wing VTOL hybrid |
| Advantages | ||
| Long range Endurance | VTOL Good maneuverability Inexpensive Easy to launch | Combines advantages of FW and RW drones |
| Disadvantages | ||
| Horizontal take-off and landing Low maneuverability | Limited payloads Susceptible to wind Strong down-wash effect | Expensive Complex technology |
| Sensor Type | Target Gases | Advantages | Disadvantages |
|---|---|---|---|
| Amperometric | Only electrochemically active gases can be detected (e.g., O2, NO, NO2, CO, O2, SO2, NH3, and H2S) |
|
|
| MOS | Suitable for a wide variety of gases, including VOCs and inorganic molecules |
|
|
| NDIR | Hydrocarbon gases and
carbon dioxide |
|
|
| PID | Volatile Organic Compounds (VOCs) |
|
|
| Parameter | High-Accuracy Optical Analyzers | Low-Cost Gas Sensors |
|---|---|---|
| Response time | <1 s | 10–60 s |
| Selectivity and sensitivity | High | Depending on technology |
| Sensor lifespan | 15–20 years | 6–24 months |
| Fail-safe | Yes | No |
| Maintenance | N/A | 30 days |
| Poisoning | N/A | Yes |
| Drift | No | Depending on technology |
| Miniaturization | In progress | Advanced |
| Price | High | Low |
| Model | Payload | Applications | Manufacturer Website (accessed on 14 July 2022) |
|---|---|---|---|
| AirDrone |
|
| www.softblue.pl/en/ |
| SnifferDrone |
|
| www.snifferrobotics.com |
| Sniffer4D Mapper |
|
| www.sniffer4d.eu |
| DR2000 |
|
| www.scentroid.com |
| SkyHub |
|
| www.integrated.ugcs.com |
| GasFinder2-UAV |
|
| www.boreal-laser.com |
| HoverGuard |
|
| www.new.abb.com |
| NuEM DRONES G |
|
| www.nuviatech-instruments.com |
| UAV radiation mapping drone and AARM system |
|
| https://www.kromek.com |
| Application | UVA Platform | Instrumentation | Main Outcome | Ref. |
|---|---|---|---|---|
| Identification of “hot spots” of CH4 fluxes | RW quadcopter
| Pergam Methane mini-G
| High spatial variability of CH4 levels was achieved over the site of interest | [121] |
| Identification of “hot spots” and “cold spots” of methane fluxes | RW quadcopter
| LI-COR LI-7810
| Methane concentration maps were produced over the site of interest | [127] |
| Detection of selected gases and gas flux estimation from volcanic plumes | RW quadcopter
| (1) K30 FR, SenseAir
| Various applications of the developed set-up were presented in three different case studies | [128] |
| Investigation of the dynamics of volcanic outgassing and plume transport | RW octacopter
| “Multi-GAS” system
| Good correlation between drone- and ground-based measurement was achieved | [129] |
| Aerosol concentration measurements in volcanic areas | RW hexacopter
| (1) Pocket PM2.5 Monitor, Yaguchi Electric
|
| [131] |
| Automated sampling of volcanic plumes | RW octacopter
| ToxiRAE Pro EC PGM-1860, RAE Systems
| Drone-borne volcanic plume sampler was more efficient than direct flask sampling at the crater rim | [130] |
| Monitoring of pollution emissions during prescribed burn of a forest | RW hexacopter
| “Kolibri” system comprised of sensors and samplers
| The system enabled unprecedented access to the fire while minimizing risk. | [133] |
| Application | UVA Platform | Instrumentation | Main Outcome | Ref. |
|---|---|---|---|---|
| Monitoring of air quality around a library | RW hexacopter
| Home-made multi-sensor
|
| [137] |
| Monitoring of air quality in the neighborhood of Heat and Power Plant | RW hexacopter
| Home-made multi-sensor
|
| [138] |
| Validation of air pollutants distribution modeling | RW hexacopter
| Home-made multi-sensor
|
| [123] |
| Monitoring of air pollution on a parking lot | RW quadcopter
| Home-made multi-sensor
| The developed set-up was able to detect chosen pollutants (both online and off-line) | [135] |
| Monitoring of PM10, PM2.5, PM1, near a roadside | RW hexacopter
| (1) PM10, PM2.5, and PM1 optical sensor (OPC-N3, Alphasense) (2) Ultra-fin particle measurement (DISC-mini, Diffusion Size Charger) (3) Black-carbon measurement (AE51, AethLabs) (4) anemometer and p, T, RH sensors (iMet-XQ2, InterMet) | The developed measuring system provided high-resolution three-dimensional analyses of selected pollutants and chosen meteorological parameters | [136] |
| Monitoring of PM2.5 in urban areas | RW hexacopter
| DSM501A, SAMYOUNG
| The developed solution is an efficient tool for monitoring of PM2.5 pollution with high spatial resolution | [134] |
| Development of advanced drone-based monitoring system for smart cities | RW quadcopter
| (1) Multi-sensor system based on MOS sensors (2) PM10, PM2.5 sensors (3) camera with a visual recognition algorithm (4) microphone with proper classification algorithm | The developed solution is an efficient tool for monitoring atmospheric and noise pollution in urban areas | [80] |
| Application | UVA Platform | Instrumentation | Main Outcome | Ref. |
|---|---|---|---|---|
| Monitoring of particulate matter from surface mining activity | RW quadcopter
| OPC-N2, AlphaSense
|
| [139] |
| Investigation of pollutant releases from mining ventilation shafts | RW quadcopter
| AirCore (home-made)
| The developed set-up is a useful tool for investigation of coal mining shaft emissions of CH4 and CO2 | [140] |
| Detection of gas leaks from buried pipelines | RW hexacopter
| Pergam Laser Methane mini G
| The drone-based set-up was used for the preliminary identification of uptight gas pipeline sections | [141] |
| Monitoring of surface and subsurface methane releases | RW octacopter
| Pergam Laser Methane mini-G
| The set-up is a useful tool for rapid identification of methane leaks but can operate only in a narrow range of heights and is not able to discriminate low and high methane levels. | [142] |
| Development of an integrated system for leaks location | FW
| Boreal Laser GasFinder 2
| This highly original set-up was designed for rapid and inexpensive detection of large leaks | [119] |
| Detection of gas leaks from pipelines with a swarm of drones | Several RWs: quadcopters and hexacopters | Mulit-sensor system:
| By using a swarm of drones, the total analysis time can be shortened and problems associated with the gas redistribution dynamics eliminated | [143] |
| Application | UVA Platform | Instrumentation | Main Outcome | Ref. |
|---|---|---|---|---|
| Monitoring of methane emission from landfills containing organic waste | RW quadrirotor
| Home-made multi-sensor
| Real-time and cost-effective pollution measurement system has been developed for CH4, CO, CO2 detection. | [144] |
| Monitoring of methane hot spots from a landfill | (1) RW quadrocopter
| (1) Optical imaging sensors (2) Multi-sensor handheld instrument
| Methane leaks from a closed landfill were detected by optical imaging sensors mounted on a drone and by handheld device based on the MOS technology | [145] |
| Detection and analysis of methane emissions from sludge | RW quadrocopter
| Aeris Pico Analyzer
| The developed system is an efficient tool for high-emission hot spot mapping at a wastewater treatment plant | [146] |
| Monitoring of odorants | RW hexacopter
| (1) Dräger X-am 8000
| The designed system was applied for gas concentration measurement and mapping as well as for the odor discrimination | [79] |
| Odor concentration mapping in the Wastewater Treatment Plant | RW hexacopter
| RHINOS e-nose
| The drone-borne e-nose can become a useful tool for environmental odor monitoring | [55] |
| Application | UVA Platform | Instrumentation | Main Outcome | Ref. |
|---|---|---|---|---|
| Exhaust emission of NO2 from a tractor | RW quadrirotor
| Muli-sensor system including the A43F sensor (AlphaSense) for NO2
| Sensors responsiveness and performance in distinct flying conditions were investigated | [148] |
| Detection of chosen gases for agriculture and security applications | RW quadrirotor
| E-nose made of six home-made sensors based on functionalized single-walled carbon nanotubes (SWNT) and various types of polymers | The developed system was able to detect volatile compounds, such as ammonia and toluene in simulated conditions | [149] |
| Detection and analysis of pollution from metropolitan areas and agriculture and livestock zones | RW quadrocopter
| Multi-sensor system
| The highest concentration of NH3 was spotted in the neighborhood of agricultural areas and stables | [150] |
| Analysis of polluted air from dairy facilities and cattle feedlots | Swarm of drones | AEROCET 531, Met One Instruments
| The system provided vertical profiles of PM2.5 concentrations. | [151] |
| Sampling of polluted air from a dairy cow farm | RW quadcopter
| Sophisticated sampling system described in [153] and composed of 50 m stainless-steel tubing, a dryer, a micropump, and a data logger | The system provided samples that were then analyzed for methane and ammonia content. | [152] |
| Application | UVA Platform | Instrumentation | Main Outcome | Ref. |
|---|---|---|---|---|
| Detection of radiation source | RW octocopter
| Gamma spectrometer (CsI (Tl) scintillator) | The set-up was able to detect a Cs-137 source hidden in one of three packages | [154] |
| Detection of radiation source | RW octocopter
| (1) Gamma spectrometer (NaI (Tl) scintillator) (2) GM detector | Developed system was able to detect three sources of radiation with a localization distance error of 30 cm | [155] |
| Mapping of radiation anomalies | RW hexacopter
| Gamma spectrometer with two Bismuth Germanium Oxygen (BGO) scintillation detectors | The developed approach is able to detect radiation anomalies with a comparable quality to a standard measurements. | [156] |
| Mapping of radiation anomalies | RW hexacopter
| Gamma spectrometer (GR1, Kromek), GPS, and LiDaR | Radiation maps were produced with a meter resolution and accuracy when mapping at heights <3 m | [157] |
| Detection of the RWTSPs in the neighborhood of the Chernobyl Nuclear Power Plant | (1) Quantum Trinity VTOL (2) RW octocopter developed by the NASU Institute of Environment Geochemistry | (1) Multi-spectral camera (2) Gamma spectrometer, LiDaR | The authors were able to detect radioactive deposits with accuracies ranging from 95.6% to 99.0% (depending on the used approach) | [158] |
| Monitoring of remediation effectiveness following the FDNPP accident | X-8 multi-rotor (Bristol University) | Gamma spectrometer (GR1, Kromek) | The developed set-up is an efficient method for producing radiation distribution maps with high resolution | [159] |
| Monitoring of radiation in the historical mining of uranium mineral veins. | X-8 multi-rotor system (Bristol University) | Gamma spectrometer (GR1 Kromek) | With the proposed set-up, it is possible to obtain 1 m scale radiation intensity plots over large areas, at a higher sampling rate than standard methods | [160] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jońca, J.; Pawnuk, M.; Bezyk, Y.; Arsen, A.; Sówka, I. Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review. Sustainability 2022, 14, 11516. https://doi.org/10.3390/su141811516
Jońca J, Pawnuk M, Bezyk Y, Arsen A, Sówka I. Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review. Sustainability. 2022; 14(18):11516. https://doi.org/10.3390/su141811516
Chicago/Turabian StyleJońca, Justyna, Marcin Pawnuk, Yaroslav Bezyk, Adalbert Arsen, and Izabela Sówka. 2022. "Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review" Sustainability 14, no. 18: 11516. https://doi.org/10.3390/su141811516
APA StyleJońca, J., Pawnuk, M., Bezyk, Y., Arsen, A., & Sówka, I. (2022). Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review. Sustainability, 14(18), 11516. https://doi.org/10.3390/su141811516