
Performance Assessment of a Sensor-Based Variable-Rate Real-Time Fertilizer Applicator for Rice Crop


Abstract
1. Introduction
2. Materials and Methods
2.1. Description of the VRT System
2.1.1. Mechanical System
2.1.2. Hydraulic System
2.1.3. N-Sensing System
2.1.4. Controller System
Variation in Metering-Mechanism Drive-Shaft Rotational Speed of the Variable-Rate Applicator with NDVI of Crop
2.2. Field Evaluation of the VRT System
2.2.1. Experimental Design for Test Evaluation of Variable-Rate Fertilizer Applicator
2.2.2. Experimental Field
2.2.3. Sensing Height
2.2.4. Crop-Growth Stages
2.2.5. Response Time Evaluation of the Real-Time-Variable Fertilizer Applicator
2.2.6. Amount of N Fertilizer Applied by Applicator
3. Results
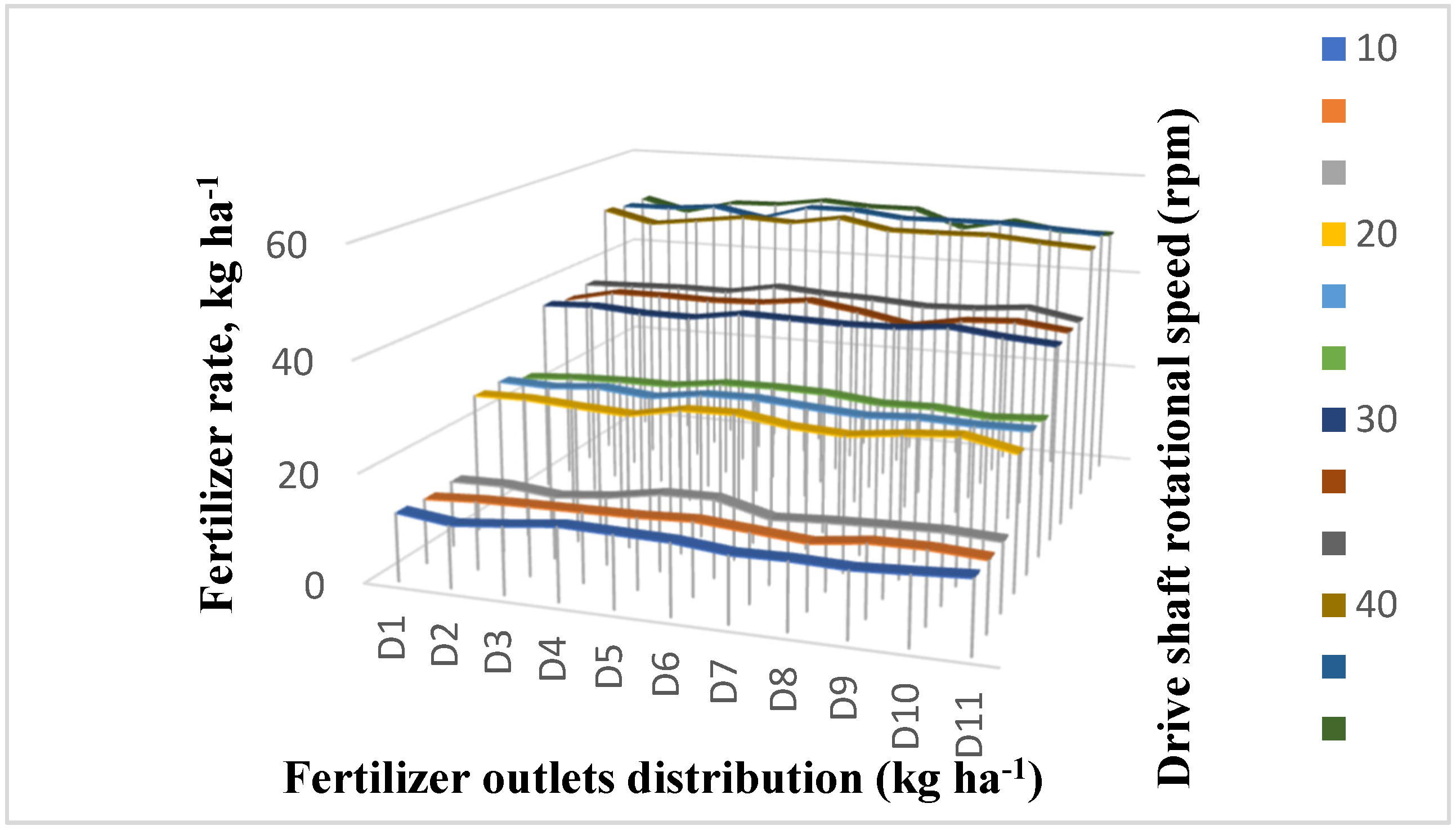
3.1. Accuracy of Fertilizer-Concentration Control
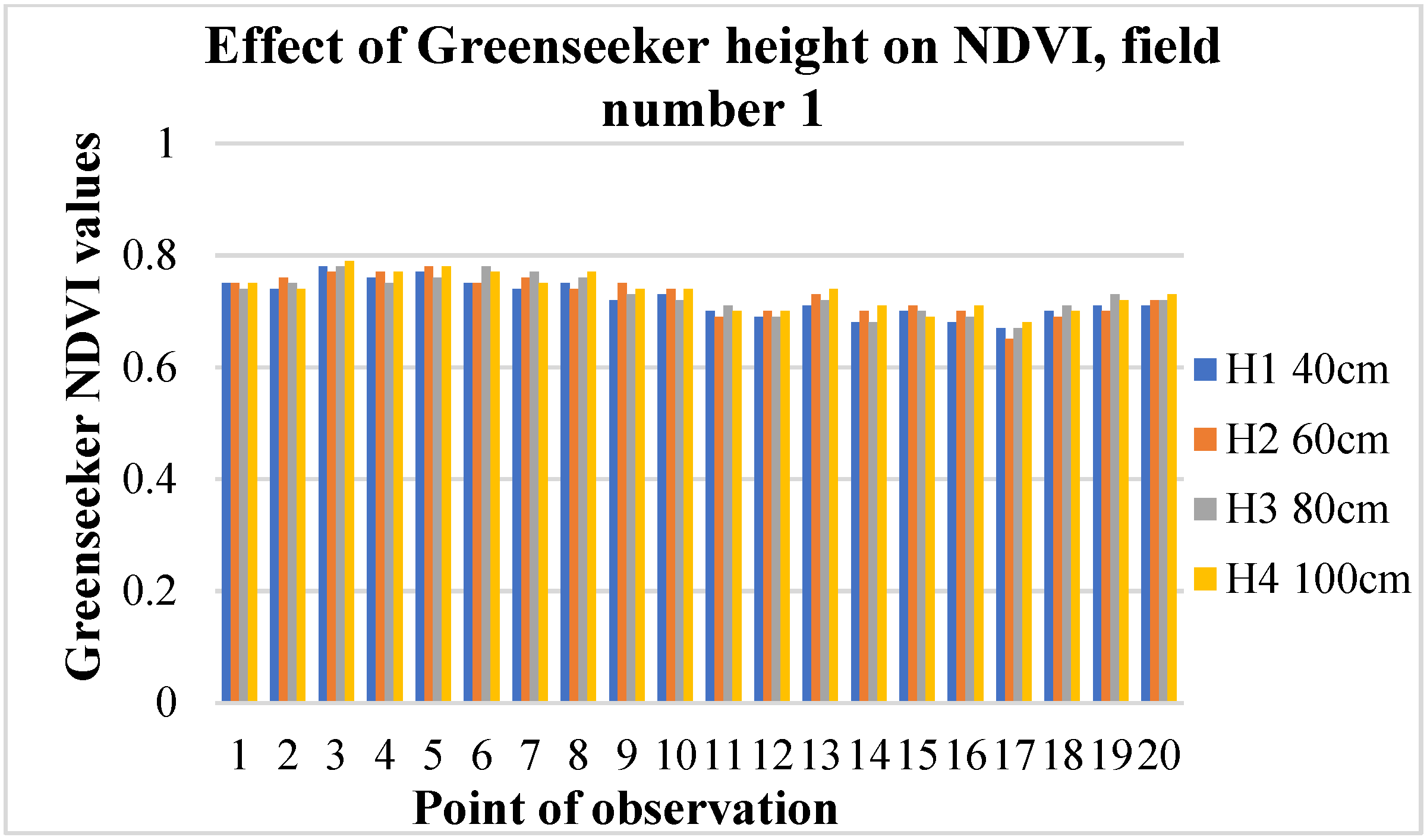
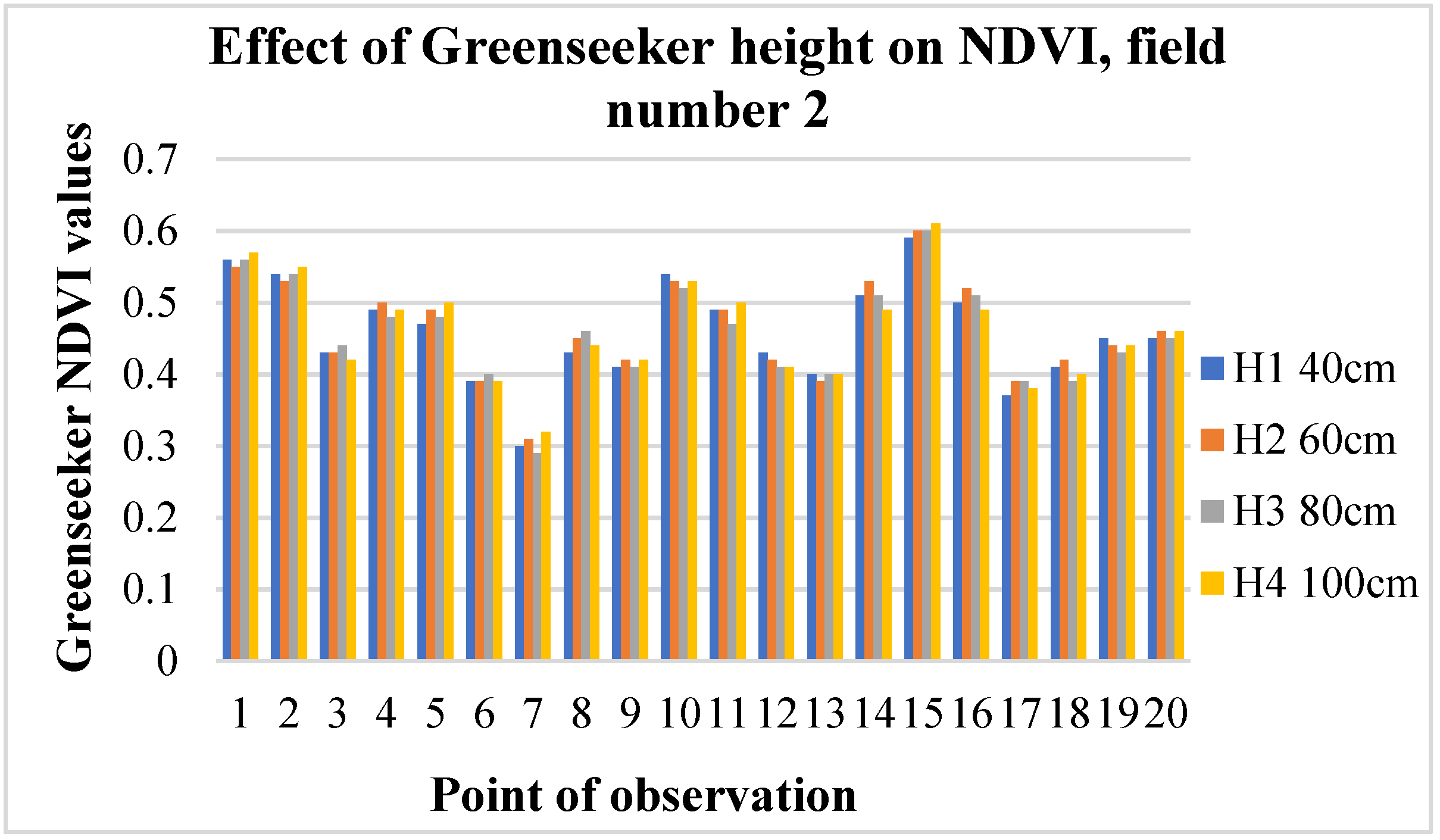
3.2. Effect of Greenseeker Height on NDVI
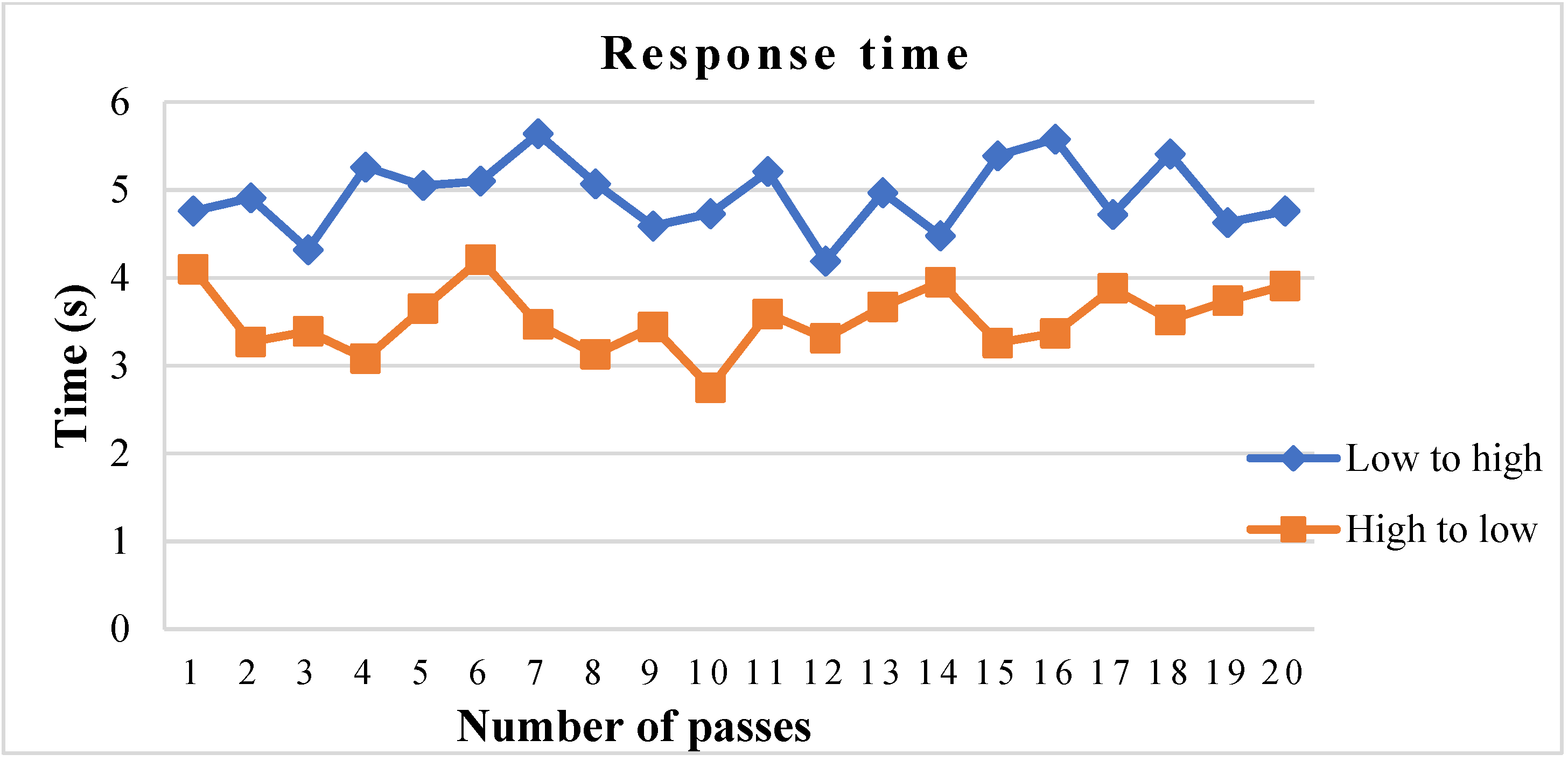
3.3. Response Time of Real Time Variable-Rate Applicator
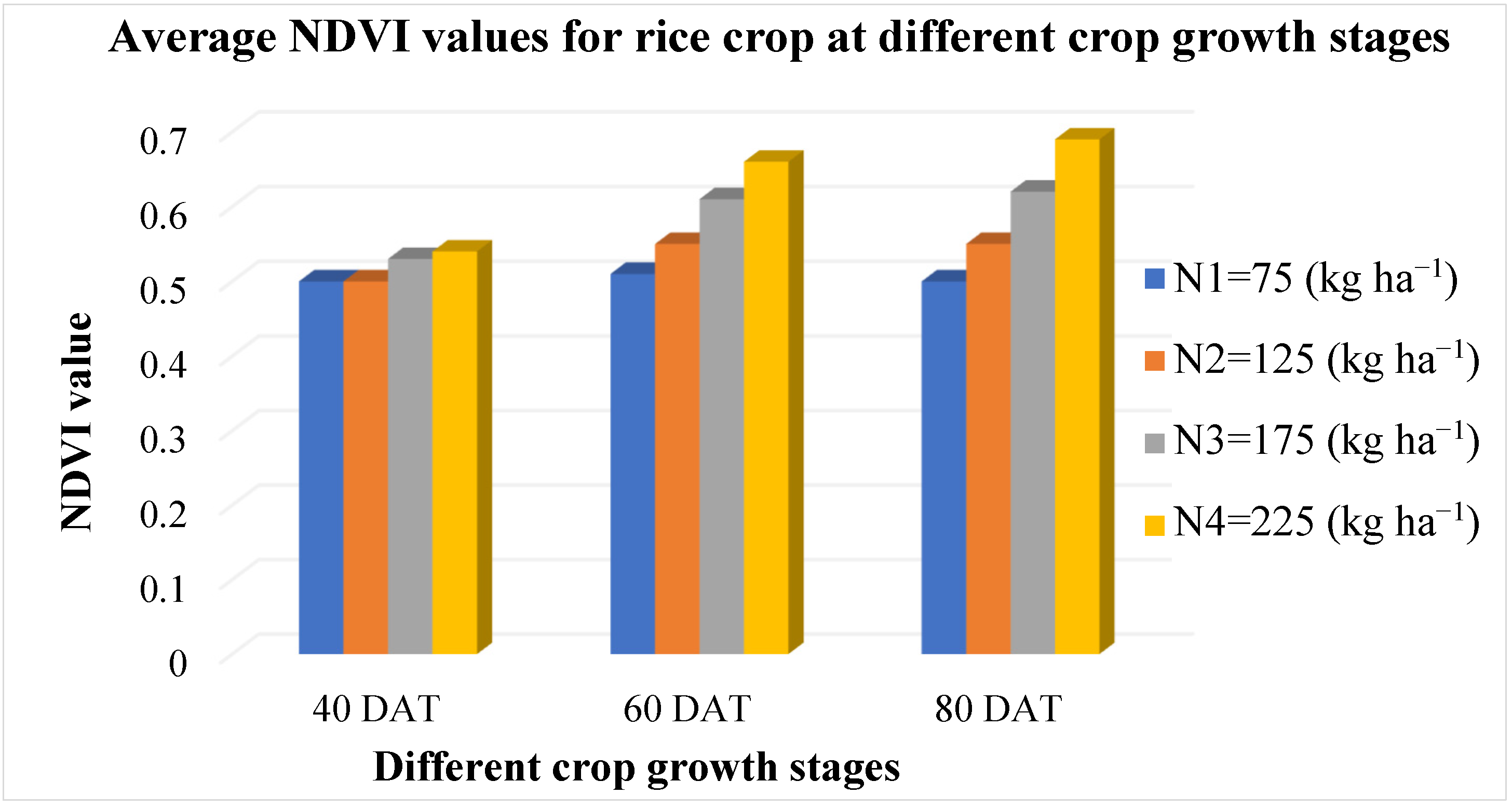
3.4. NDVI Values for Rice Crop at Different Crop Growth Stages
3.5. Application of Fertilizer at Different Crop Growth Stages Using Variable-Rate Applicator
3.6. Savings in Fertilizer Application by Using Variable-Rate Applicator
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jat, M.L.; Chakraborty, D.; Ladha, J.K.; Rana, D.S.; Gathala, M.K.; McDonald, A.; Gerard, B. Conservation agriculture for sustainable intensification in South Asia. Nat. Sustain. 2020, 3, 336–343. [Google Scholar] [CrossRef]
- Lee, S. Recent advances on nitrogen use efficiency in rice. Agronomy 2021, 11, 753. [Google Scholar] [CrossRef]
- Quan, Z.; Zhang, X.; Fang, Y.; Davidson, E.A. Different quantification approaches for nitrogen use efficiency lead to divergent estimates with varying advantages. Nat. Food 2021, 2, 241–245. [Google Scholar] [CrossRef]
- Tao, M.; Ma, X.; Huang, X.; Liu, C.; Deng, R.; Liang, K.; Qi, L. Smartphone-based detection of leaf color levels in rice plants. Comput. Electron. Agric. 2020, 173, 105431. [Google Scholar] [CrossRef]
- Li, Y.; Xu, J.; Liu, X.; Liu, B.; Liu, W.; Jiao, X. Win-win for monosodium glutamate industry and paddy agriculture: Replacing chemical nitrogen with liquid organic fertilizer from wastewater mitigates reactive nitrogen losses while sustaining yields. J. Clean. Prod. 2022, 347, 131287. [Google Scholar] [CrossRef]
- Rodriguez, D.G.P. An assessment of the site-specific nutrient management (SSNM) strategy for irrigated rice in Asia. Agriculture 2020, 10, 559. [Google Scholar] [CrossRef]
- Baral, B.R.; Pande, K.R.; Gaihre, Y.K.; Baral, K.R.; Sah, S.K.; Thapa, Y.B.; Singh, U. Real-time nitrogen management using decision support-tools increases nitrogen use efficiency of rice. Nutr. Cycl. Agroecosyst. 2021, 119, 355–368. [Google Scholar] [CrossRef]
- Zeng, X.; Han, B.; Xu, F.; Huang, J.; Cai, H.; Shi, L. Effects of modified fertilization technology on the grain yield and nitrogen use efficiency of midseason rice. Field Crops Res. 2012, 137, 203–212. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Z.; Tian, H.; Mo, Z.; Ashraf, U.; Duan, M.; Wang, Z.; Wang, S.; Tang, X.; Pan, S. Roles of nitrogen deep placement on grain yield, nitrogen use efficiency, and antioxidant enzyme activities in mechanical pot-seedling transplanting rice. Agronomy 2020, 10, 1252. [Google Scholar] [CrossRef]
- Peng, S.; Buresh, R.J.; Huang, J.; Zhong, X.; Zou, Y.; Yang, J.; Wang, G.; Liu, Y.; Hu, R.; Tang, Q.; et al. Improving nitrogen fertilization in rice by sitespecific N management. A review. Agron. Sustain. Dev. 2010, 30, 649–656. [Google Scholar] [CrossRef]
- Chen, Y.; Peng, J.; Wang, J.; Fu, P.; Hou, Y.; Zhang, C.; Fahad, S.; Peng, S.; Cui, K.; Nie, L.; et al. Crop management based on multi-split topdressing enhances grain yield and nitrogen use efficiency in irrigated rice in China. Field Crops Res. 2015, 184, 50–57. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Playán Jubillar, E. Optimum management of furrow fertigation to maximize water and fertilizer application efficiency and uniformity. J. Agric. Sci. Technol. 2014, 16, 591–607. [Google Scholar] [CrossRef]
- Batte, M.T.; Arnholt, M.W. Precision farming adoption and use in Ohio: Case studies of six leading-edge adopters. Comput. Electron. Agric. 2003, 38, 125–139. [Google Scholar] [CrossRef]
- Thind, H.S.; Gupta, R.K. Need based nitrogen management using the chlorophyll meter and leaf colour chart in rice and wheat in South Asia: A review. Nutr. Cycl. Agroecosyst. 2010, 88, 361–380. [Google Scholar] [CrossRef]
- Robert, P.C. Precision agriculture: A challenge for crop nutrition management. Plant Soil 2002, 247, 143–149. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Kim, Y.J.; Kim, H.J.; Ryu, K.H.; Rhee, J.Y. Fertiliser application performance of a variable-rate pneumatic granular applicator for rice production. Biosyst. Eng. 2008, 100, 498–510. [Google Scholar] [CrossRef]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- Xu, J.; Peng, S.; Yang, S.; Wang, W. Ammonia volatilization losses from a rice paddy with different irrigation and nitrogen managements. Agric. Water Manag. 2012, 104, 184–192. [Google Scholar] [CrossRef]
- Olson, D.M.; Cortesero, A.M.; Rains, G.C.; Potter, T.; Lewis, W.J. Nitrogen and water affect direct and indirect plant systemic induced defense in cotton. Biol. Control. 2009, 49, 239–244. [Google Scholar] [CrossRef]
- Barbieri, P.; Pellerin, S.; Seufert, V.; Smith, L.; Ramankutty, N.; Nesme, T. Global option space for organic agriculture is delimited by nitrogen availability. Nat. Food 2021, 2, 363–372. [Google Scholar] [CrossRef]
- Tavakoli, H.; Gebbers, R. Assessing nitrogen and water status of winter wheat using a digital camera. Comput. Electron. Agric. 2019, 157, 558–567. [Google Scholar] [CrossRef]
- Rong, L.B.; Gong, K.Y.; Duan, F.Y.; LI, S.K.; Ming, Z.H.A.O.; Jianqiang, H.E.; Zhou, W.B.; Qiang, Y.U. Yield gap and resource utilization efficiency of three major food crops in the world–A review. J. Integr. Agric. 2021, 20, 349–362. [Google Scholar] [CrossRef]
- Cheng, B.; Jiang, Y.; Cao, C. Balance rice yield and eating quality by changing the traditional nitrogen management for sustainable production in China. J. Clean. Prod. 2021, 312, 127793. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, Y. Evaluating the potential health and economic effects of nitrogen fertilizer application in grain production systems of China. J. Clean. Prod. 2020, 264, 121635. [Google Scholar] [CrossRef]
- Liang, H.; Yang, S.; Xu, J.; Hu, K. Modeling water consumption, N fates, and rice yield for water-saving and conventional rice production systems. Soil Tillage Res. 2021, 209, 104944. [Google Scholar] [CrossRef]
- Deng, F.; Li, W.; Wang, L.; Hu, H.; Liao, S.; Pu, S.L.; Tao, Y.F.; Li, G.H.; Ren, W.J. Effect of controlled-release fertilizers on leaf characteristics, grain yield, and nitrogen use efficiency of machine-transplanted rice in southwest China. Arch. Agron. Soil Sci. 2021, 67, 1739–1753. [Google Scholar] [CrossRef]
- Inman, D.; Khosla, R.; Westfall, D.G.; Reich, R. Nitrogen uptake across site specific management zones in irrigated corn production systems. Agron. J. 2005, 97, 169–176. [Google Scholar] [CrossRef]
- Xu, J.; Liu, B.; Wang, H.; Liu, W.; Li, Y.; Dai, Y.; Lu, T. Ammonia volatilization and nitrogen leaching following top-dressing of urea from water-saving irrigated rice field: Impact of two-split surge irrigation. Paddy Water Environ. 2019, 17, 45–51. [Google Scholar] [CrossRef]
- da Silva, M.J.; Magalhaes, P.S. A liquid injection dosing system for site-specific fertiliser management. Biosyst. Eng. 2017, 163, 150–158. [Google Scholar] [CrossRef]
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. On-the-go soil sensors for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef]
- Hirel, B.; Tétu, T.; Lea, P.J.; Dubois, F. Improving nitrogen use efficiency in crops for sustainable agriculture. Sustainability 2011, 3, 1452–1485. [Google Scholar] [CrossRef]
- Khalilian, A.; Rogers, N.G.; Williams, P.B.; Han, Y.J.; Nafchi, A.M.; Maja, J.M.; Marshall, M.W.; Payero, J.O. Sensor-Based Algorithm for Mid-Season Nitrogen Application in Corn. Open J. Soil Sci. 2017, 7, 278–287. [Google Scholar] [CrossRef][Green Version]
- Varco, J. Crop Reflectance as an Indicator of Cotton Growth and Leaf Nitrogen Status. In Proceedings of the ASA-CSSA-SSSA International Annual Meetings, Indianapolis, IN, USA, 12–16 November 2006. [Google Scholar]
- Scharf, P.C.; Lory, J.A. Calibrating reflectance measurements to predict optimal side dress nitrogen rate for corn. Agron. J. 2009, 101, 615–625. [Google Scholar] [CrossRef]
- Arnall, D.B. Analysis of the Coefficient of Variation of Remote Sensor Readings in Winter Wheat, and Development of a Sensor Based Mid-Season N Recommendation for Cotton. Ph.D Thesis, Oklahoma State University, Stillwater, OK, USA, 2008. [Google Scholar]
- Raun, W.R.; Solie, J.B.; Stone, M.L.; Martin, K.L.; Freeman, K.W.; Mullen, R.W.; Zhang, H.; Schepers, J.S.; Johnson, G.V. Optical sensor-based algorithm for crop nitrogen fertilization. Commun. Soil Sci. Plant Anal. 2005, 36, 2759–2781. [Google Scholar] [CrossRef]
- Malhi, S.S.; Grant, C.A.; Johnston, A.M.; Gill, K.S. Nitrogen fertilization management for no-till cereal production in the Canadian Great Plains: A review. Soil Tillage Res. 2001, 60, 101–122. [Google Scholar] [CrossRef]
- Kharim, M.N.A.; Wayayok, A.; Abdullah, A.F.; Shariff, A.R.M. Effect of variable rate application on rice leaves burn and chlorosis in system of rice intensification. Malays. J. Sustain. Agric. 2020, 4, 66–70. [Google Scholar] [CrossRef]
- Alam, M.Z.; Sadekuzzaman, M.; Sarker, S.; Hafiz, M.H.R. Reducing soil application of nitrogenous fertilizer as influenced by liquid fertilization on yield and yield traits of kataribhog rice. Int. J. Agron. Agric. Res. 2015, 6, 63–69. [Google Scholar]
- Wu, A.; Hammer, G.L.; Doherty, A.; von Caemmerer, S.; Farquhar, G.D. Quantifying impacts of enhancing photosynthesis on crop yield. Nat. Plants 2019, 5, 380–388. [Google Scholar] [CrossRef]
- Shaygany, J.; Peivandy, N.; Ghasemi, S. Increased yield of direct seeded rice (Oryza sativa L.) by foliar fertilization through multi-component fertilizers. Arch. Agron. Soil Sci. 2012, 58, 1091–1098. [Google Scholar] [CrossRef]
- Syam’Un, E.; Musa, Y.; Sadimantara, G.R.; Leomo, S.; Rakian, T.C. The effect of shade on chlorophyll and anthocyanin content of upland red rice. In Proceedings of the IOP Conference Series: Earth and Environmental Science, International Conference on Agriculture, Environment, and Food Security, Medan, Indonesia, 7–8 November 2017; IOP Publishing: Bristol, UK; Volume 122, p. 012030. [Google Scholar] [CrossRef]
- Chen, R.K.; Yang, C.M. Determining the optimal timing for using LAI and NDVI to predict rice yield. J. Photogramm. Remote Sens. 2005, 10, 239–254. [Google Scholar]
- Li, L.; Zhang, Q.; Huang, D. A review of imaging techniques for plant phenotyping. Sensors 2014, 14, 20078–20111. [Google Scholar] [CrossRef] [PubMed]
- Naito, H.; Ogawa, S.; Valencia, M.O.; Mohri, H.; Urano, Y.; Hosoi, F.; Omasa, K. Estimating rice yield related traits and quantitative trait loci analysis under different nitrogen treatments using a simple tower-based field phenotyping system with modified single-lens reflex cameras. J. Photogramm. Remote Sens. 2017, 125, 50–62. [Google Scholar] [CrossRef]
- Varinderpal-Singh; Kunal; Kaur, R.; Mehtab-Singh; Mohkam-Singh; Harpreet-Singh; Bijay-Singh. Prediction of grain yield and nitrogen uptake by basmati rice through in-season proximal sensing with a canopy reflectance sensor. Precis. Agric. 2021, 23, 733–747. [Google Scholar] [CrossRef]
- Grant, C.A.; Wu, R.; Selles, F.; Harker, K.N.; Clayton, G.W.; Bittman, S.; Zebarth, B.J.; Lupwayi, N.Z. Crop yield and nitrogen concentration with controlled release urea and split applications of nitrogen as compared to non-coated urea applied at seeding. Field Crops Res. 2012, 127, 170–180. [Google Scholar] [CrossRef]
- Chen, L.S.; Wang, K. Diagnosing of rice nitrogen stress based on static scanning technology and image information extraction. J. Soil Sci. Plant Nutr. 2014, 14, 382–393. [Google Scholar] [CrossRef]
- Gholizadeh, A.; Saberioon, M.; Borůvka, L.; Wayayok, A.; Soom, M.A.M. Leaf chlorophyll and nitrogen dynamics and their relationship to lowland rice yield for site-specific paddy management. Inf. Process. Agric. 2017, 4, 259–268. [Google Scholar] [CrossRef]
- Package of Practices for the Crops of Punjab. Kharif 2019–2020. Available online: https://www.pau.edu/content/pf/pp_kharif.pdf (accessed on 18 July 2019).
- Package of Practices for the Crops of Punjab. Rabi 2019–2020. Available online: https://www.pau.edu/content/pf/pp_rabi.pdf (accessed on 18 November 2019).
- El Nahry, A.H.; Ali, R.R.; El Baroudy, A.A. An approach for precision farming under pivot irrigation system using remote sensing and GIS techniques. Agric. Water Manag. 2011, 98, 517–531. [Google Scholar] [CrossRef]
- Rokhafrouz, M.; Latifi, H.; Abkar, A.A.; Wojciechowski, T.; Czechlowski, M.; Naieni, A.S.; Maghsoudi, Y.; Niedbała, G. Simplified and Hybrid Remote Sensing-Based Delineation of Management Zones for Nitrogen Variable Rate Application in Wheat. Agriculture 2021, 11, 1104. [Google Scholar] [CrossRef]
- Grisso, R.D.; Alley, M.M.; Thomason, W.E.; Holshouser, D.L.; Roberson, G.T. Precision Farming Tools: Variable-Rate Application; Virginia Cooperative Extension Publication: Charlottesville, VA, USA, 2011; pp. 442–505. [Google Scholar]
- Ess, D.R.; Morgan, M.T.; Parson, S.D. Implementing Site-Specific Management: Map-Versus Sensor-Based Variable Rate Application; Publication Number SSM-2-W; Site-Specific Management Center, Purdue University: West Lafayette, IN, USA, 2001. [Google Scholar]
- Van Loon, J.; Speratti, A.B.; Gabarra, L.; Govaerts, B. Precision for smallholder farmers: A small-scale-tailored variable rate fertilizer application kit. Agriculture 2018, 8, 48. [Google Scholar] [CrossRef]
- Jeong, I.G.; Jeong, S.O.; Seong, J.H.; Lee, C.G. Development of map-based variable-rate applicator. Proc. Korean Soc. Agric. Mach. Conf. 2006, 11, 345–348. Available online: http://koreascience.kr/article/CFKO200636035485058.page (accessed on 21 July 2019).
- Sui, R. Performance assessment of a variable-rate fertilizer applicator. J. Agric. Sci. 2019, 11, 25–30. [Google Scholar] [CrossRef]
- Baio, F.H.R.; Balastreire, L.A. Evaluation of a site specific chemical application system based on the spatial variability of weeds. In Proceedings of the World Congress of Computers in Agriculture and Natural Resources, Iguacu Falls, Brazil, 13–15 March 2002; pp. 225–231. [Google Scholar] [CrossRef]
- Forouzanmehr, E.; Loghavi, M. Design, development and field evaluation of a map-based variable rate granular fertilizer application control system. Agric. Eng. Int. CIGR J. 2012, 14, 255–261. [Google Scholar]
- Zhang, S.; Lan, Y.; Wei, L.I.; Hoffmann, W.C.; Xu, Y.; Ma, C. Variable rate fertilization for maize and its effects based on the site-specific soil fertility and yield. Agric. Eng. Int. CIGR J. 2007. [Google Scholar] [CrossRef]
- Iida, M.; Umeda, M.; Radite, P.A.S. Variable rate fertilizer applicator for paddy field. In Proceedings of the ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, Sacramento, CA, USA, 29 July–1 August 2001. [Google Scholar] [CrossRef]
- King, B.A.; Wall, R.W. Secondary, spatially variable chemical application system for site-specific crop management using continuous-move irrigation systems. In Proceedings of the ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, Sacramento, CA, USA, 29 July–1 August 2001. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, X.; Zhao, C.; Meng, Z.; Chen, L. Design and experiment of variable rate fertilizer spreader with conveyor chain. Trans. Chin. Soc. Agric. Eng. 2012, 28, 20–25. [Google Scholar] [CrossRef]
- Aghkhani, A.D.M.; Motie, M.K.J.B. Fabrication and evaluation of variable rate fertilizer system. J. Agric. Mach. 2015, 5, 251–260. [Google Scholar]
- Türker, U.; Talepbour, B.; Özgüven, M.M. Development of a Row Type Variable Rate Fertilizer Machine and Performance Assessment. Gaziosmanpaşa Üniversitesi Ziraat Fakültesi Derg. 2019, 36, 36–44. [Google Scholar]
- Xiangyu, G.; Yanming, L.; Yubin, M.; Chengliang, L. Development of variable rate fertilizer applicator based on GPRS. Trans. Chin. Soc. Agric. Eng. 2007, 23, 164–167. [Google Scholar]
- Martins, R.N.; Pinto, F.D.A.D.C.; Moura, A.D.D.; Siqueira, W.D.C.; Villar, F.M.D.M. Nitrogen variable rate fertilization in corn crop prescribed by optical sensor. J. Plant Nutr. 2020, 43, 1681–1688. [Google Scholar] [CrossRef]
- Stamatiadis, S.; Schepers, J.S.; Evangelou, E.; Tsadilas, C.; Glampedakis, A.; Glampedakis, M.; Dercas, N.; Spyropoulos, N.; Dalezios, N.R.; Eskridge, K. Variable-rate nitrogen fertilization of winter wheat under high spatial resolution. Precis. Agric. 2018, 19, 570–587. [Google Scholar] [CrossRef]
- Mirzakhaninafchi, H.; Singh, M.; Bector, V.; Gupta, O.P.; Singh, R. Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer. Sustainability 2021, 13, 8694. [Google Scholar] [CrossRef]
- Sozzi, M.; Bernardi, E.; Kayad, A.; Marinello, F.; Boscaro, D.; Cogato, A.; Gasparini, F.; Tomasi, D. On-the-go variable rate fertilizer application on vineyard using a proximal spectral sensor. In Proceedings of the IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Trento, Italy, 4–6 November 2020; pp. 343–347. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, X.; Guo, J.; Chen, L.; Zhou, J.; Ma, W. Development of Variable Rate Fertilizer System Based on Optical Sensor. Sens. Transducers 2014, 26, 1. [Google Scholar]
- Maleki, M.R.; Mouazen, A.M.; De Ketelaere, B.; Ramon, H.; De Baerdemaeker, J. On-the-go variable-rate phosphorus fertilisation based on a visible and near-infrared soil sensor. Biosyst. Eng. 2008, 99, 35–46. [Google Scholar] [CrossRef]
- Yinyan, S.H.I.; Man, C.H.E.N.; Xiaochan, W.A.N.G.; OO, M.; Chengguang, L.I.; Weimin, D.I.N.G. Design and experiment of variable-rate fertilizer spreader with centrifugal distribution cover for rice paddy surface fertilization. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 86–93. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and experiment of a variable spray system for unmanned aerial vehicles based on PID and PWM control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef]
- Quebrajo, L.; Pérez-Ruiz, M.; Rodriguez-Lizana, A.; Agüera, J. An approach to precise nitrogen management using hand-held crop sensor measurements and winter wheat yield mapping in a mediterranean environment. Sensors 2015, 15, 5504–5517. [Google Scholar] [CrossRef]
- Amaral, L.R.; Molin, J.P.; Portz, G.; Finazzi, F.B.; Cortinove, L. Comparison of crop canopy reflectance sensors used to identify sugarcane biomass and nitrogen status. Precis. Agric. 2015, 16, 15–28. [Google Scholar] [CrossRef]
- Cho, S.I.; Choi, S.H.; Kim, Y.Y. Development of electronic mapping system for N-fertilizer dosage using real-time soil organic matter sensor and DGPS. Biosyst. Eng. 2002, 27, 259–266. [Google Scholar]
- Cilia, C.; Panigada, C.; Rossini, M.; Meroni, M.; Busetto, L.; Amaducci, S.; Boschetti, M.; Picchi, V.; Colombo, R. Nitrogen status assessment for variable rate fertilization in maize through hyperspectral imagery. Remote Sens. 2014, 6, 6549–6565. [Google Scholar] [CrossRef]
- Schumann, A.W.; Miller, W.M.; Zaman, Q.U.; Hostler, K.H.; Buchanon, S.; Cugati, S. Variable rate granular fertilization of citrus groves: Spreader performance with single-tree prescription zones. Appl. Eng. Agric. 2006, 22, 19–24. [Google Scholar] [CrossRef]
- Portz, G.; Molin, J.P.; Jasper, J. Active crop sensor to detect variability of nitrogen supply and biomass on sugarcane fields. Precis. Agric. 2012, 13, 33–44. [Google Scholar] [CrossRef]
- Jafari, M.; Hemmat, A.; Sadeghi, M. Development and performance assessment of a DC electric variable-rate controller for use on grain drills. Comput. Electron. Agric. 2010, 73, 56–65. [Google Scholar] [CrossRef]
- Tumbo, S.D.; Salyani, M.; Miller, W.M.; Sweeb, R.; Buchanon, S. Evaluation of a variable rate controller for aldicarb application around buffer zones in citrus groves. Comput. Electron. Agric. 2007, 56, 147–160. [Google Scholar] [CrossRef]
- Tola, E.; Kataoka, T.; Burce, M.; Okamoto, H.; Hata, S. Granular fertiliser application rate control system with integrated output volume measurement. Biosyst. Eng. 2008, 101, 411–416. [Google Scholar] [CrossRef]
- Chandel, N.S.; Mehta, C.R.; Tewari, V.K.; Nare, B. Digital map-based site-specific granular fertilizer application system. Curr. Sci. 2016, 111, 1208–1213. [Google Scholar] [CrossRef]
- Tewari, V.K. Application of microcontroller interfaced with DGPS for variable rate fertilizer applicator. In Proceedings of the ASABE Annual International Meeting, New Orleans, LA, USA, 26–29 July 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Alameen, A.A.; Al-Gaadi, K.A.; Tola, E. Development and performance evaluation of a control system for variable rate granular fertilizer application. Comput. Electron. Agric. 2019, 160, 31–39. [Google Scholar] [CrossRef]
- Talha, Z.; Tola, E.; Al-Gaadi, K.A.; Kheiralla, A.F. Pneumatic system for granular fertilizer flow rate control. Middle East J. Sci. Res. 2011, 8, 688–693. [Google Scholar]
- Reyes, J.F.; Esquivel, W.; Cifuentes, D.; Ortega, R. Field testing of an automatic control system for variable rate fertilizer application. Comput. Electron. Agric. 2015, 113, 260–265. [Google Scholar] [CrossRef]
- Jones, A.; Ali, U.; Egerstedt, M. Optimal pesticide scheduling in precision agriculture. In Proceedings of the ACM/IEEE 7th International Conference on Cyber-Physical Systems (ICCPS), Vienna, Austria, 11–14 April 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Sokefeld, M. Variable rate technology for herbicide application. In Precision Crop Protection-the Challenge and Use of Heterogeneity; Springer: Dordrecht, The Netherlands, 2010; pp. 335–347. [Google Scholar] [CrossRef]
- Longchamps, L.; Khosla, R.; Reich, R.; Gui, D.W. Spatial and temporal variability of soil water content in leveled fields. Soil Sci. Soc. Am. J. 2015, 79, 1446–1454. [Google Scholar] [CrossRef]
- Linker, R. Model-based optimal delineation of drip irrigation management zones. Precis. Agric. 2021, 22, 287–305. [Google Scholar] [CrossRef]
- Sharma, V.; Irmak, S. Comparative analyses of variable and fixed rate irrigation and nitrogen management for maize in different soil types: Part I. Impact on soil-water dynamics and crop evapotranspiration. Agric. Water Manag. 2021, 245, 106644. [Google Scholar] [CrossRef]
- Serrano, J.; Shahidian, S.; Marques da Silva, J.; Paixão, L.; Moral, F.; Carmona-Cabezas, R.; Garcia, S.; Palha, J.; Noéme, J. Mapping Management Zones Based on Soil Apparent Electrical Conductivity and Remote Sensing for Implementation of Variable Rate Irrigation—Case Study of Corn under a Center Pivot. Water 2020, 12, 3427. [Google Scholar] [CrossRef]
- Mendes, W.R.; Araújo, F.M.U.; Dutta, R.; Heeren, D.M. Fuzzy control system for variable rate irrigation using remote sensing. Expert Syst. Appl. 2019, 124, 13–24. [Google Scholar] [CrossRef]
- Zhao, W.; Li, J.; Yang, R.; Li, Y. Determining placement criteria of moisture sensors through temporal stability analysis of soil water contents for a variable rate irrigation system. Precis. Agric. 2018, 19, 648–665. [Google Scholar] [CrossRef]
- Miller, K.A.; Luck, J.D.; Heeren, D.M.; Lo, T.; Martin, D.L.; Barker, J.B. A geospatial variable rate irrigation control scenario evaluation methodology based on mining root zone available water capacity. Precis. Agric. 2018, 19, 666–683. [Google Scholar] [CrossRef]
- He, X.; Ding, Y.; Zhang, D.; Yang, L.; Cui, T.; Zhong, X. Development of a variable-rate seeding control system for corn planters Part II: Field performance. Comput. Electron. Agric. 2019, 162, 309–317. [Google Scholar] [CrossRef]
- Šarauskis, E.; Kazlauskas, M.; Naujokiene, V.; Bruciene, I.; Steponavicius, D.; Romaneckas, K.; Jasinskas, A. Variable Rate Seeding in Precision Agriculture: Recent Advances and Future Perspectives. Agriculture 2022, 12, 305. [Google Scholar] [CrossRef]
- Koch, B.; Khosla, R.; Frasier, W.M.; Westfall, D.G.; Inman, D. Economic feasibility of variable-rate nitrogen application utilizing site-specific management zones. Agron. J. 2004, 96, 1572–1580. [Google Scholar] [CrossRef]
- Rodriguez, D.G.P.; Bullock, D.S.; Boerngen, M.A. The origins, implications, and consequences of yield-based nitrogen fertilizer management. Agron. J. 2019, 111, 725–735. [Google Scholar] [CrossRef]
- Trevisan, R.G.; Bullock, D.S.; Martin, N.F. Spatial variability of crop responses to agronomic inputs in on-farm precision experimentation. Precis. Agric. 2021, 22, 342–363. [Google Scholar] [CrossRef]
- Sanches, G.M.; Otto, R. A novel approach for determining nitrogen requirement based on a new agronomic principle—sugarcane as a crop model. Plant Soil 2022, 472, 29–43. [Google Scholar] [CrossRef]
- Maleki, M.R.; Zamiran, A. Evaluating the profitability of a soil sensor-based variable rate applicator for on-the-go phosphorus fertilization. Int. J. Agric. Biol. 2009, 11, 651–658. [Google Scholar]
- Gurjar, B.; Sahoo, P.K.; Kumar, A. Design and development of variable rate metering system for fertilizer application. J. Agric. Eng. 2017, 54, 12–21. [Google Scholar]
- Katz, L.; Ben-Gal, A.; Litaor, M.I.; Naor, A.; Peres, M.; Bahat, I.; Netzer, Y.; Peeters, A.; Alchanatis, V.; Cohen, Y. Spatiotemporal normalized ratio methodology to evaluate the impact of field-scale variable rate application. Precis. Agric. 2022, 23, 1125–1152. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G. Effects of control sequence optimisation on the performance of bivariate fertiliser applicator. Comput. Electron. Agric. 2022, 192, 106594. [Google Scholar] [CrossRef]
- Heiß, A.; Paraforos, D.S.; Sharipov, G.M.; Griepentrog, H.W. Real-time control for multi-parametric data fusion and dynamic offset optimization in sensor-based variable rate nitrogen application. Comput. Electron. Agric. 2022, 196, 106893. [Google Scholar] [CrossRef]
- Guerrero, A.; Mouazen, A.M. Evaluation of variable rate nitrogen fertilization scenarios in cereal crops from economic, environmental and technical perspective. Soil Tillage Res. 2021, 213, 105110. [Google Scholar] [CrossRef]
- Amaral, L.R.; Trevisan, R.G.; Molin, J.P. Canopy sensor placement for variable-rate nitrogen application in sugarcane fields. Precis. Agric. 2018, 19, 147–160. [Google Scholar] [CrossRef]
- Colaço, A.F.; Molin, J.P. Variable rate fertilization in citrus: A long term study. Precis. Agric. 2017, 18, 169–191. [Google Scholar] [CrossRef]
- Guerrero, A.; De Neve, S.; Mouazen, A.M. Current sensor technologies for in situ and on-line measurement of soil nitrogen for variable rate fertilization: A review. Adv. Agron. 2021, 168, 1–38. [Google Scholar] [CrossRef]
- Guerrero, A.; De Neve, S.; Mouazen, A.M. Data fusion approach for map-based variable-rate nitrogen fertilization in barley and wheat. Soil Tillage Res. 2021, 205, 104789. [Google Scholar] [CrossRef]
- Sharipov, G.M.; Heiß, A.; Eshkabilov, S.L.; Griepentrog, H.W.; Paraforos, D.S. Variable rate application accuracy of a centrifugal disc spreader using ISO 11783 communication data and granule motion modeling. Comput. Electron. Agric. 2021, 182, 106006. [Google Scholar] [CrossRef]
- Dahal, S.; Phillippi, E.; Longchamps, L.; Khosla, R.; Andales, A. Variable rate nitrogen and water management for irrigated maize in the Western US. Agronomy 2020, 10, 1533. [Google Scholar] [CrossRef]
- Gatti, M.; Schippa, M.; Garavani, A.; Squeri, C.; Frioni, T.; Dosso, P.; Poni, S. High potential of variable rate fertilization combined with a controlled released nitrogen form at affecting cv. Barbera vines behavior. Eur. J. Agron. 2020, 112, 125949. [Google Scholar] [CrossRef]
- Sharipov, G.M.; Heiß, A.; Griepentrog, H.W.; Paraforos, D.S. Evaluation of Centrifugal Spreader Response to Variable Rate Application by Using Task File Data. IFAC-PapersOnLine 2020, 53, 15804–15809. [Google Scholar] [CrossRef]
- Song, C.; Zhou, Z.; Zang, Y.; Zhao, L.; Yang, W.; Luo, X.; Jiang, R.; Ming, R.; Zang, Y.; Zi, L.; et al. Variable-rate control system for UAV-based granular fertilizer spreader. Comput. Electron. Agric. 2021, 180, 105832. [Google Scholar] [CrossRef]
- Chen, M.; Yang, Z.; Wang, X.; Shi, Y.; Zhang, Y. Response characteristics and efficiency of variable rate fertilization based on spectral reflectance. Int. J. Agric. Biol. Eng. 2018, 11, 152–158. [Google Scholar] [CrossRef]
- Chattha, H.S.; Zaman, Q.U.; Chang, Y.K.; Read, S.; Schumann, A.W.; Brewster, G.R.; Farooque, A.A. Variable rate spreader for real-time spot-application of granular fertilizer in wild blueberry. Comput. Electron. Agric. 2014, 100, 70–78. [Google Scholar] [CrossRef]
- Fulton, J.P.; Shearer, S.A.; Higgins, S.F.; McDonald, T.P. A method to generate and use as-applied surfaces to evaluate variable-rate fertilizer applications. Precis. Agric. 2013, 14, 184–200. [Google Scholar] [CrossRef]
- Robertson, M.J.; Llewellyn, R.S.; Mandel, R.; Lawes, R.; Bramley, R.G.V.; Swift, L.; Metz, N.; O’callaghan, C. Adoption of variable rate fertiliser application in the Australian grains industry: Status, issues and prospects. Precis. Agric. 2012, 13, 181–199. [Google Scholar] [CrossRef]
- Kitchen, N.R.; Sudduth, K.A.; Drummond, S.T.; Scharf, P.C.; Palm, H.L.; Roberts, D.F.; Vories, E.D. Ground-based canopy reflectance sensing for variable-rate nitrogen corn fertilization. Agron. J. 2010, 102, 71–84. [Google Scholar] [CrossRef]
- Su, N.; Xu, T.; Song, L. Development of a variable rate fertilization control system based on DC motor for use on granular fertilizer applicator. In Proceedings of the Fifth International Conference on Communication Systems and Network Technologies, Gwalior, India, 4–6 April 2015; pp. 1205–1209. [Google Scholar] [CrossRef]
- Radite, P.A.S.; Hermawan, W.; Budiyanto, B.; Azis, A. Development of Variable Rate Fertilizer Applicator Module Based on 8-bit Embedded System. In Proceedings of the AFITA International Conference, The Quality Information for Competitive Agricultural Based Production System and Commerce, IPB International Convention Center (IICC), Baranangsiang, Bogor, Indonesia, 4–7 October 2010. [Google Scholar]
- Rogers, N.G.; Williams, P.B.; Nafchi, A.M.; Han, Y.J.; Maja, J.M.J.; Payero, J.O.; Khalilian, A. Development of a sensor-based algorithm to determine the mid-season nitrogen requirements in deficit irrigated corn production. In Proceedings of the ASABE Annual International Meeting, American Society of Agricultural and Biological Engineers, Spokane, WA, USA, 16–19 July 2017. [Google Scholar] [CrossRef]
- Benjamin, E.; Krishnan, D.A.; Kavitha, R. Development of Fertilizer Broadcaster with Electronically Controlled Fluted Roller Metering Mechanism for Paddy Crop. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 2694–2703. [Google Scholar] [CrossRef]
- Wang, H.; Gu, Z.; Xu, J.; Li, S.; Qi, Z.; Li, Y.; Zhou, J. Automatic variable rate fertilisation system for improved fertilisation uniformity in paddy fields. Biosyst. Eng. 2022, 219, 56–67. [Google Scholar] [CrossRef]
- Qi, J.; Tian, X.; Li, Y.; Fan, X.; Yuan, H.; Zhao, J.; Jia, H. Design and experiment of a subsoiling variable rate fertilization machine. Int. J. Agric. Biol. Eng. 2020, 13, 118–124. [Google Scholar] [CrossRef]
- Molin, J.P.; Motomiya, A.V.D.A.; Frasson, F.R.; Faulin, G.D.C.; Tosta, W. Test procedure for variable rate fertilizer on coffee. Acta Scientiarum. Agronomy 2010, 32, 569–575. [Google Scholar] [CrossRef]
- Fulton, J.; Shearer, S.; Higgins, S.; McDonald, T.; Dillon, C.; Stombaugh, T. Variable-rate fertilizer application assessment using an as-applied methodology. In Proceedings of the Precision Agriculture ’07, 6th European Conference on Precision Agriculture, Skiathos, Greece, 3–6 June 2007; Wageningen Academic: Wageningen, The Netherlands, 2007; p. 681. [Google Scholar] [CrossRef]
- Wigley, K.; Owens, J.; Trethewey, J.; Ekanayake, D.; Roten, R.; Werner, A. Optical sensors for variable rate nitrogen application in dairy pastures. J. N. Z. Grassl. 2017, 79, 223–227. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Huang, J.; Zhang, Y. A Study on the Time Lag and Compensation of a Variable-Rate Fertilizer Applicator. Appl. Eng. Agric. 2021, 37, 43–52. [Google Scholar] [CrossRef]
- Mohan, S.S.; Ajay, A.; Jayan, P.R. GPS and Sensor Based Technologies in Variable Rate Fertilizer Application. International Journal of Agriculture, Environ. Biotechnol. 2021, 14, 21–27. [Google Scholar] [CrossRef]
- Tang, X.Y.; Chen, Y.Z.; Peng, Y.K.; Wang, X.; Xu, Y.; Yang, W.L.; Wang, W. A DSP-Based Control System for Precision Variable Rate Fertilization. Adv. Mater. Res. 2013, 605, 1408–1414. [Google Scholar] [CrossRef]
- Hussain, N.; Farooque, A.A.; Schumann, A.W.; McKenzie-Gopsill, A.; Esau, T.; Abbas, F.; Acharya, B.; Zaman, Q. Design and development of a smart variable rate sprayer using deep learning. Remote Sens. 2020, 12, 4091. [Google Scholar] [CrossRef]
- Farooque, A.A.; Hussain, N.; Schumann, A.W.; Abbas, F.; Afzaal, H.; McKenzie-Gopsill, A.; Esau, T.; Zaman, Q.; Wang, X. Field Evaluation of a Deep Learning-based Smart Variable-Rate Sprayer for Targeted Application of Agrochemicals. Smart Agric. Technol. 2022, 3, 100073. [Google Scholar] [CrossRef]
- de Paula Corrêdo, L.; de Carvalho Pinto, F.D.A.; Queiroz, D.S.; Valente, D.S.M.; de Melo Villar, F.M. Nitrogen variable rate in pastures using optical sensors. Semin. Cienc. Agrar. 2019, 40, 2917–2932. [Google Scholar] [CrossRef]
- Vatsanidou, A.; Fountas, S.; Liakos, V.; Nanos, G.; Katsoulas, N.; Gemtos, T. Life Cycle Assessment of Variable Rate Fertilizer Application in a Pear Orchard. Sustainability 2020, 12, 6893. [Google Scholar] [CrossRef]
- Maciel, B.H.; Mantovani, I.; Hubert, M.A.; Goergen, R.; Rannov, C.; Rasia, L.A.; Valdiero, A.C. Development of a Human–Machine Interface Implemented in Smartphone for a Variable Rate Fertilizer Applicator. In Interdisciplinary Conference on Innovation, Desgin, Entrepreneurship, And Sustainable Systems; Springer: Cham, Switzerland, 2021; pp. 356–362. [Google Scholar] [CrossRef]
- Hosseini, M.S.; Almassi, M.; Minaei, S.; Ebrahimzadeh, M.R. Response time of a variable rate fertilizer applicator. Adv. Environ. Biol. 2014, 8, 1–9. [Google Scholar]
- Jia, H.; Feng, X.; Qi, J.; Liu, X.; Liu, C.; Yang, Y.; Li, Y. Research and Application of Variable Rate Fertilizer Applicator System Based on a DC Motor. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture, Beijing, China, 18–20 September 2013; pp. 381–391. [Google Scholar]
- Yu, Y.J.; Ge, Z.Y.; Zhang, S.H. A Variable Rate Fertilization System Based on ARM and its Realization. Appl. Mech. Mater. 2013, 303, 1465–1469. [Google Scholar] [CrossRef]
- Ji, J.; Wang, X.; Ma, W.; Mao, Y.; Guo, J. Development of a controller for an automatic variable rate fertilizer applicator. In Proceedings of the World Automation Congress, Kobe, Japan, 19–23 September 2010; pp. 345–349. [Google Scholar]
- Huang, J.X.; Zhou, H.B.; Wang, J.F.; Hou, Y. Research on Variable Rate Fertilization Control System based on Fuzzy PID. Appl. Mech. Mater. 2014, 614, 207–210. [Google Scholar] [CrossRef]
- Wang, C.; Liang, L.; Liang, T. Design of variable rate fertilization control system based on improved PID. In Proceedings of the International Conference on Measurement, Information and Control, Harbin, China, 18–20 May 2012; Volume 2, pp. 1037–1040. [Google Scholar] [CrossRef]
- Chen, G.; Dong, W.; Jiang, J.; Wang, G. Variable-Rate Fertilization Decision-Making System Based on Visualization Toolkit and Spatial Fuzzy Clustering. Sens. Lett. 2012, 10, 230–235. [Google Scholar] [CrossRef]
- Chunying, L.; Xi, W. Variable-rate fertilization control system based on fuzzy PID control strategy. In Proceedings of the International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 2511–2514. [Google Scholar] [CrossRef]
- Huang, W.; Chen, L.; Meng, Z.; Zhao, C. Design of Can-based Variable Rate Fertilizer Control System. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture, Wuyishan, China, 18–20 August 2007; pp. 1317–1320. [Google Scholar] [CrossRef]
- Hosseini, M.S.; Almassi, M.; Minaei, S.; Ebrahimzadeh, M.R. Accuracy of two types of fertilizer rate control systems in a variable rate fertilizer applicator. Adv. Environ. Biol. 2014, 8, 306–314. [Google Scholar]
- Muslimin, J.; Bakar, B.A.; Abd Rani, M.N.F.; Bookeri, M.A.; Abdullah, M.Z.K.; Ismail, R.; Yasin, L. Performance evaluation of active canopy sensor for variable rate fertilizer model in paddy production. ASM Sci. J. 2020, 13, 96–103. [Google Scholar]
- Ma, X.; Ma, C.; Sang, G.; Zhuang, J. Design of variable rate fertilizer applicator. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2005, 36, 50–53. [Google Scholar]
- Yu, Y.; Zhang, S.; Qi, J.; Zhang, L. Positioning method of variable rate fertilizer applicator based on sensors. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2009, 40, 165–168. [Google Scholar]
- Kim, Y.J.; Kim, H.J.; Seo, M.; Rhee, J.Y. Development of a Variable Rate Granule Applicator for Environment-Friendly Precision Agriculture (II)-Development of Pneumatic Fertilizer Blow Head and Its Application Uniformity. Biosyst. Eng. 2006, 31, 474–481. [Google Scholar]
- Ryu, K.H.; Kim, Y.J.; Cho, S.I.; Rhee, J.Y. Development of variable rate granule applicator for environment-friendly precision agriculture (I)-concept design of variable rate pneumatic granule applicator and manufacture of prototype. Biosyst. Eng. 2006, 31, 305–314. [Google Scholar] [CrossRef]
- Kim, M.H.; Fu, J.D.; Lee, B.W. Determining nitrogen topdressing rate at panicle initiation stage of rice based on vegetation index and SPAD reading. Korean J. CROP Sci. 2006, 51, 386–395. [Google Scholar]
- Miller, W.M.; Schumann, A.; Whitney, J.D.; Buchanon, S. Variable rate applications of granular fertilizer for citrus test plots. Appl. Eng. Agric. 2005, 21, 795–801. [Google Scholar] [CrossRef]
- Koundal, A.; Singh, M.; Sharma, A.; Mishra, P.K.; Sharma, K. Development and evaluation of an experimental machine for Variable Rate Application of granular fertilizers. In Proceedings of the Sixth International Conference on Sensing Technology (ICST), Kolkata, India, 18–21 December 2012; pp. 370–373. [Google Scholar] [CrossRef]
- Fulton, J.P.; Shearer, S.A.; Chabra, G.; Higgins, S.F. Performance assessment and model development of a variable–rate, spinner–disc fertilizer applicator. Trans. ASAE 2001, 44, 1071. [Google Scholar] [CrossRef]
- May, S.; Kocabiyik, H. Design and development of an electronic drive and control system for micro-granular fertilizer metering unit. Comput. Electron. Agric. 2019, 162, 921–930. [Google Scholar] [CrossRef]
- Fulton, J.P.; Shearer, S.A.; Higgins, S.F.; Darr, M.J.; Stombaugh, T.S. Rate response assessment from various granular VRT applicators. Trans. ASAE 2005, 48, 2095–2103. [Google Scholar] [CrossRef]
- Anglund, E.A.; Ayers, P.D. Field evaluation of response times for a variable rate (pressure-based and injection) liquid chemical applicators. Appl. Eng. Agric. 2003, 19, 273–282. [Google Scholar] [CrossRef]
- Al-Gaadi, K.A.; Ayers, P.D. Integrating GIS and GPS into a spatially variable rate herbicide application system. Appl. Eng. Agric. 1999, 15, 255–262. [Google Scholar] [CrossRef]
- Fulton, J.P.; Shearer, S.A.; Stombaugh, T.S.; Anderson, M.E.; Burks, T.F.; Higgins, S.F. Simulation of fixed–and variable–rate application of granular materials. Trans. ASAE 2003, 46, 1311–1321. [Google Scholar] [CrossRef]
- Coelho, J.L.D.; Molin, J.P.; Gadanha Júnior, C.D.; Vasarhelyi, A. Avaliação do Desempenho de Máquinas Aplicadoras a Lanço na Distribuição de Gesso Agrícola (Evaluation of the Performance of Spreader Machines in the Distribution of Agricultural Gypsum); XXI Congresso Brasileiro De Engenharia Agricola E I Simposio De Engenharia Agricola Do Cone Sul (Brazilian Agricultural Engineering Congress): Santa Maria, Brazil, 1992; Volume 4, pp. 2058–2103. [Google Scholar]
- Molin, J.P.; Menegatti, L.A.A.; Pereira, L.L.; Cremonini, L.C.; Evangelista, M. Testing a fertilizer spreader with VRT. In Proceedings of the World Congress of Computers in Agriculture and Natural Resources. American Society of Agricultural and Biological Engineers, Iguacu Falls, Brazil, 13–15 March 2002; pp. 232–237. [Google Scholar] [CrossRef]
- Fulton, J.P.; Shearer, S.A.; Higgins, S.F.; Hancock, D.W.; Stombaugh, T.S. Distribution pattern variability of granular VRT applicator. Trans. ASAE 2005, 48, 2053–2064. [Google Scholar] [CrossRef]
- Nouman, Z.; Klima, B.; Knobloch, J. Generating PWM signals with variable duty from 0% to 100% based FPGA SPARTAN3AN. Electrorevue J. Int. Soc. Sci. Eng. Publ. 2013, 4, 75–79. [Google Scholar]
- Cornell University. Nutrient Management Spear Program, Agronomy Fact Sheet 84: Crop Vigor Sensing for Variable-Rate Nitrogen, Greenseeker Algorithm Theory. Available online: http://nmsp.cals.cornell.edu/guidelines/factsheets.html (accessed on 17 December 2019).
- Walkley, A.; Black, I.A. An examination of the Degtjareff method for determining soil organic matter, and a proposed modification of the chromic acid titration method. Soil Sci. 1934, 37, 29–38. [Google Scholar] [CrossRef]
- Olsen, S.R. Estimation of Available Phosphorus in Soils by Extraction with Sodium Bicarbonate; US Department of Agriculture: Washington, DC, USA, 1954; pp. 1–19.
- Pratt, P.F.P. Methods of Soil Analysis: Part 2 Chemical and Microbiological Properties. Am. Soc. Agron. Inc. 1965, 9, 1022–1030. [Google Scholar]
- GreenSeeker Handheld Crop Sensor. Available online: https://agriculture.trimble.com/product/greenseeker-handheld-crop-sensor/?_gl=1*1w4jliw*_ga*MTgzMTkxMDY2Mi4xNjU0MDA4MDU3*_ga_1TWB0X464Z*MTY1NDAwODA1Ni4xLjEuMTY1NDAwODExOS4w (accessed on 23 June 2018).
- Raun, W.R.; Johnson, G.V.; Lees, H.L.; Sembiring, H.; Phillips, S.B.; Solie, J.B.; Stone, M.L.; Whitney, R.W. Microvariability in soil test, plant nutrient, and yield parameters in bermudagrass. Soil Sci. Soc. Am. J. 1998, 62, 683–690. [Google Scholar] [CrossRef]
- Bolland, M.D.A.; Wilson, I.R. Soil phosphorus testing: 1. Studies on spatial variation of Colwell soil test phosphorus. Commun. Soil Sci. Plant Anal. 1994, 25, 2371–2384. [Google Scholar] [CrossRef]
- Dhillon, N.S.; Samra, J.S.; Sadana, U.S.; Nielsen, D.R. Spatial variability of soil test values in a Typic Ustochrept. Soil Technol. 1994, 7, 163–171. [Google Scholar] [CrossRef]
- Ali, A.M.; Thind, H.S. A framework for refining nitrogen management in dry direct-seeded rice using GreenSeeker™ optical sensor. Comput. Electron. Agric. 2015, 110, 114–120. [Google Scholar] [CrossRef]
- Bahri, A. Modulating Wheat Seeding Rate for Site Specific Crop Management. Ph.D. Thesis, University of Nebraska, Lincoln, NE, USA, 1996. [Google Scholar]
- Maleki, M.R.; Ramon, H.; De Baerdemaeker, J.; Mouazen, A.M. A study on the time response of a soil sensor-based variable rate granular fertiliser applicator. Biosyst. Eng. 2008, 100, 160–166. [Google Scholar] [CrossRef]
- Naser, M.A.; Khosla, R.; Longchamps, L.; Dahal, S. Using NDVI to differentiate wheat genotypes productivity under dryland and irrigated conditions. Remote Sens. 2020, 12, 824. [Google Scholar] [CrossRef]
- Thind, H.S.; Kumar, A.; Choudhary, O.P.; Gupta, R.K.; Vashistha, M. Site-specific fertilizer nitrogen management using optical sensor in irrigated wheat in the Northwestern India. Agric. Res. 2017, 6, 159–168. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drive-Shaft Rotational Speed (rpm) | Overall Implementation Error (%) |
|---|---|
| 10 | 0.83 |
| 20 | 1.63 |
| 30 | 3.56 |
| 40 | 4.92 |
| N Levels (kg ha−1) | Mean NDVI Values | Mean Drive-Shaft Rotational Speed (rpm) | Mean Fertilizer Rate (kg ha−1) |
|---|---|---|---|
| N1 = 75 | 0.49 | 25 | 30.83 |
| N2 = 125 | 0.50 | 26 | 30.91 |
| N3 = 175 | 0.53 | 21 | 27.08 |
| N4 = 225 | 0.54 | 20 | 26.75 |
| N Levels (kg ha−1) | Mean NDVI Values | Mean Drive-Shaft Rotational Speed (rpm) | Mean Fertilizer Rate (kg ha−1) |
|---|---|---|---|
| N1 = 75 | 0.51 | 25 | 30.42 |
| N2 = 125 | 0.55 | 20 | 25.58 |
| N3 = 175 | 0.61 | 13 | 17.58 |
| N4 = 225 | 0.66 | 9 | 11.42 |
| N Levels (kg ha−1) | Mean NDVI Values | Mean Drive-Shaft Rotational Speed (rpm) | Mean Fertilizer Rate (kg ha−1) |
|---|---|---|---|
| N1 = 75 | 0.50 | 26 | 35.29 |
| N2 = 125 | 0.55 | 20 | 24.38 |
| N3 = 175 | 0.62 | 12 | 17.16 |
| N4 = 225 | 0.69 | 7 | 9.15 |
| N Levels (kg ha−1) | Basal Dose | First Dose (10 DAT) | Second Dose (40 DAT) | Third Dose (60 DAT) | Fourth Dose (80 DAT) | Total |
|---|---|---|---|---|---|---|
| N1 = 75 | 25 | 12.5 | 30.83 | 30.42 | 35.29 | 134.04 |
| N2 = 125 | 25 | 25.0 | 30.91 | 25.58 | 24.38 | 130.87 |
| N3 = 175 | 25 | 37.5 | 27.08 | 17.58 | 17.16 | 124.32 |
| N4 = 225 | 25 | 50 | 26.75 | 11.42 | 9.15 | 122.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirzakhaninafchi, H.; Singh, M.; Dixit, A.K.; Prakash, A.; Sharda, S.; Kaur, J.; Nafchi, A.M. Performance Assessment of a Sensor-Based Variable-Rate Real-Time Fertilizer Applicator for Rice Crop. Sustainability 2022, 14, 11209. https://doi.org/10.3390/su141811209
Mirzakhaninafchi H, Singh M, Dixit AK, Prakash A, Sharda S, Kaur J, Nafchi AM. Performance Assessment of a Sensor-Based Variable-Rate Real-Time Fertilizer Applicator for Rice Crop. Sustainability. 2022; 14(18):11209. https://doi.org/10.3390/su141811209
Chicago/Turabian StyleMirzakhaninafchi, Hasan, Manjeet Singh, Anoop Kumar Dixit, Apoorv Prakash, Shikha Sharda, Jugminder Kaur, and Ali Mirzakhani Nafchi. 2022. "Performance Assessment of a Sensor-Based Variable-Rate Real-Time Fertilizer Applicator for Rice Crop" Sustainability 14, no. 18: 11209. https://doi.org/10.3390/su141811209
APA StyleMirzakhaninafchi, H., Singh, M., Dixit, A. K., Prakash, A., Sharda, S., Kaur, J., & Nafchi, A. M. (2022). Performance Assessment of a Sensor-Based Variable-Rate Real-Time Fertilizer Applicator for Rice Crop. Sustainability, 14(18), 11209. https://doi.org/10.3390/su141811209