


Acceleration and Deceleration Rates in Interrupted Flow Based on Empirical Digital Tachograph Data


Abstract
:1. Introduction
2. Literature Review
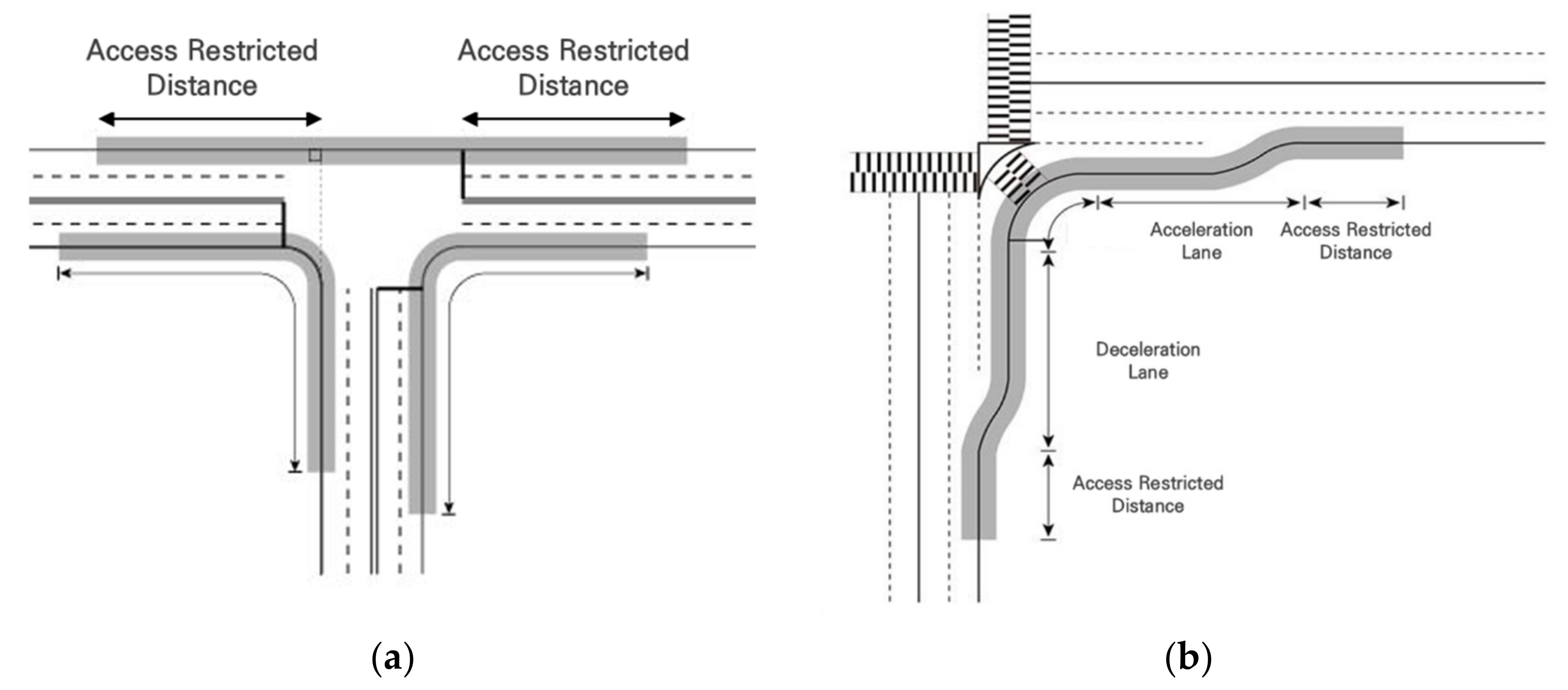
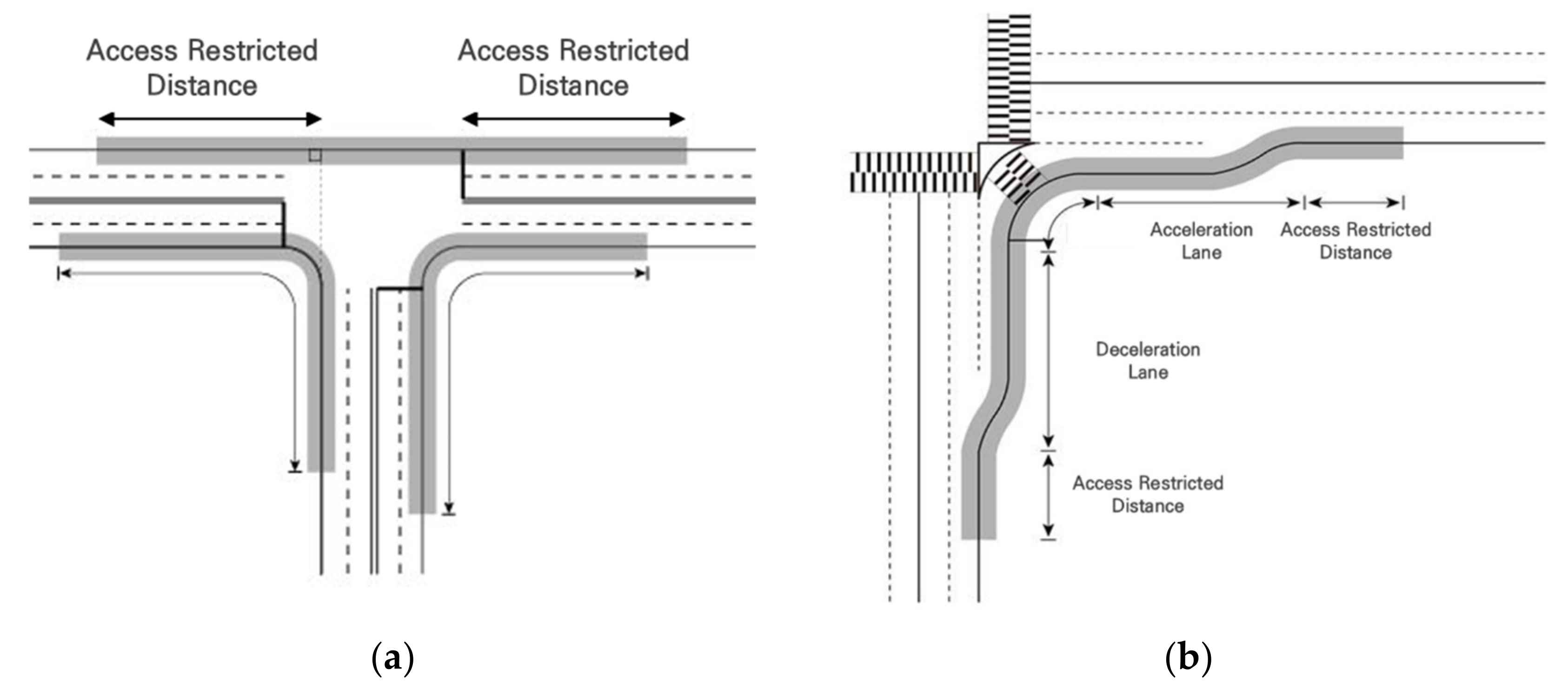
2.1. Current Regulations about Auxiliary Lane
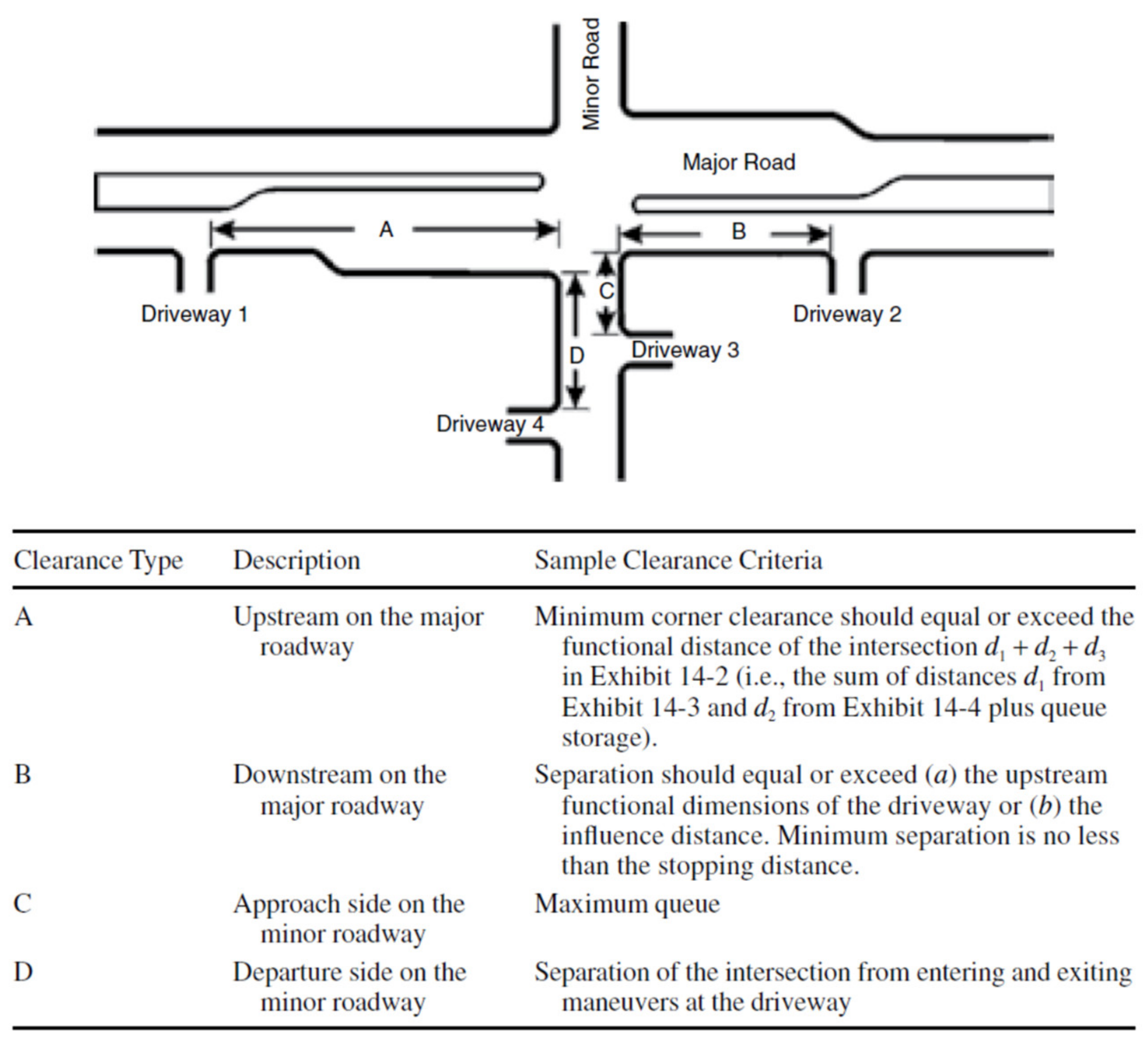
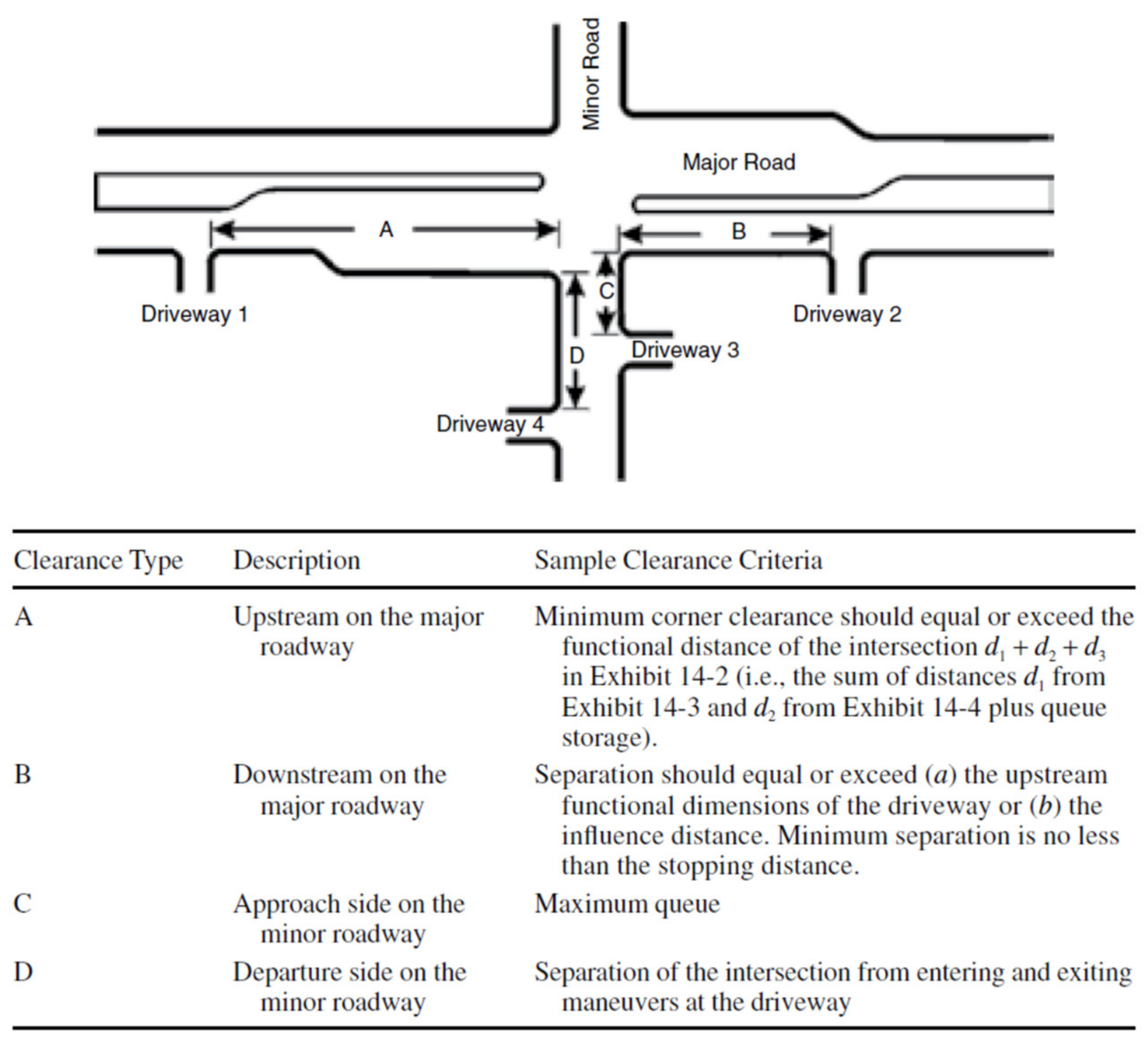
2.2. Current Regulations about Corner Clearance Distance from Intersection
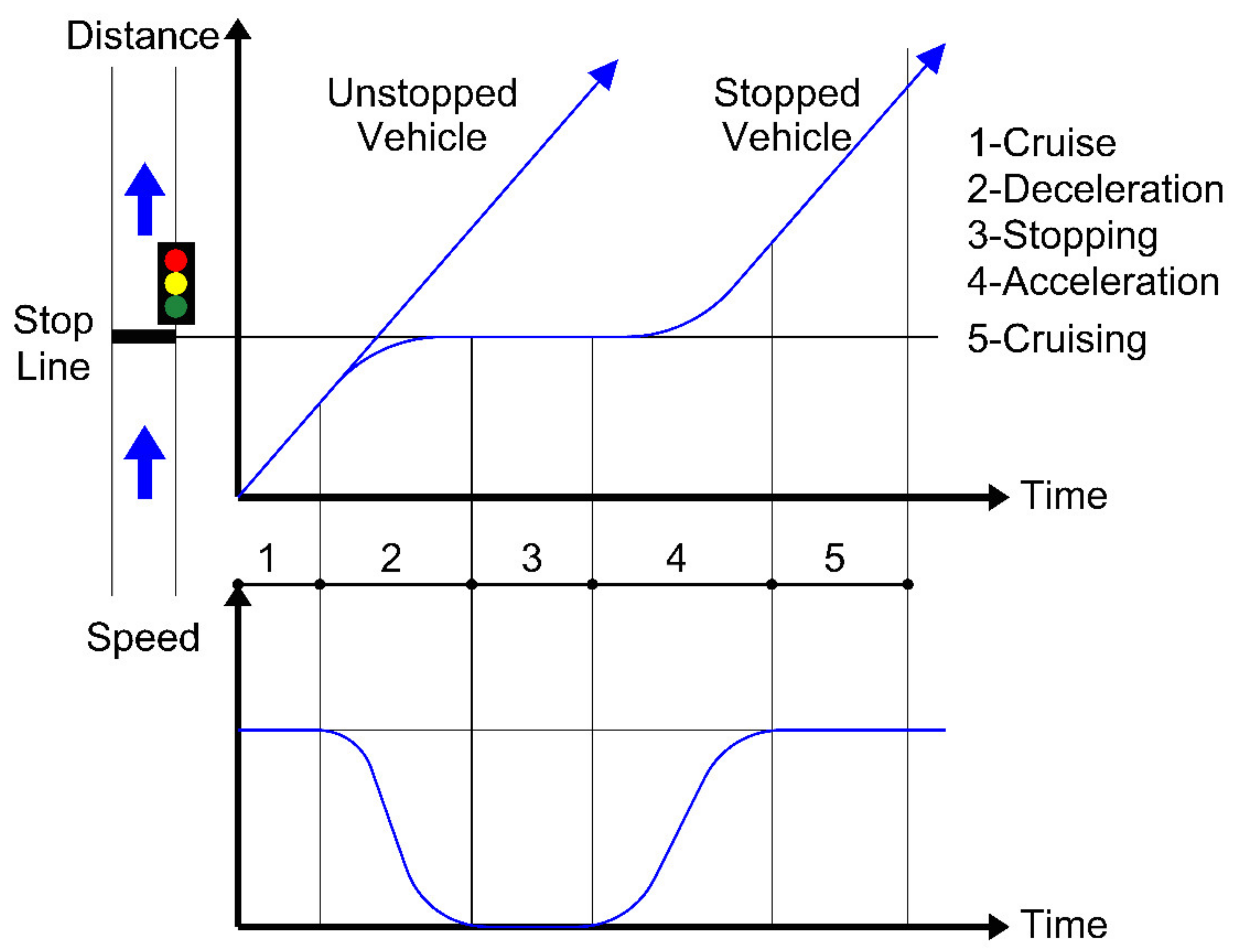
2.3. Acceleration and Deceleration Behavior of Vehicles
3. Data Collection and Screening
3.1. DTG
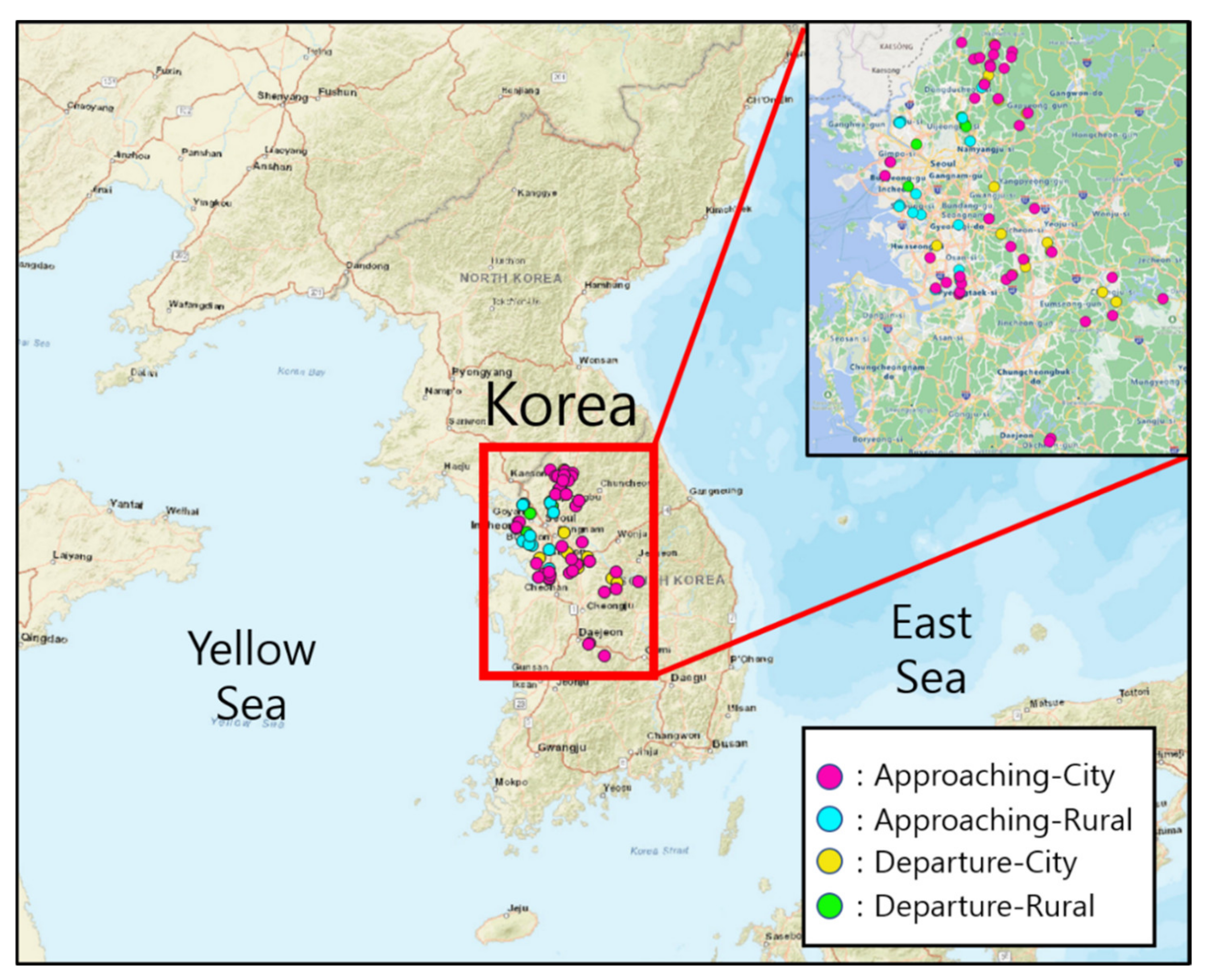
3.2. Study Sites
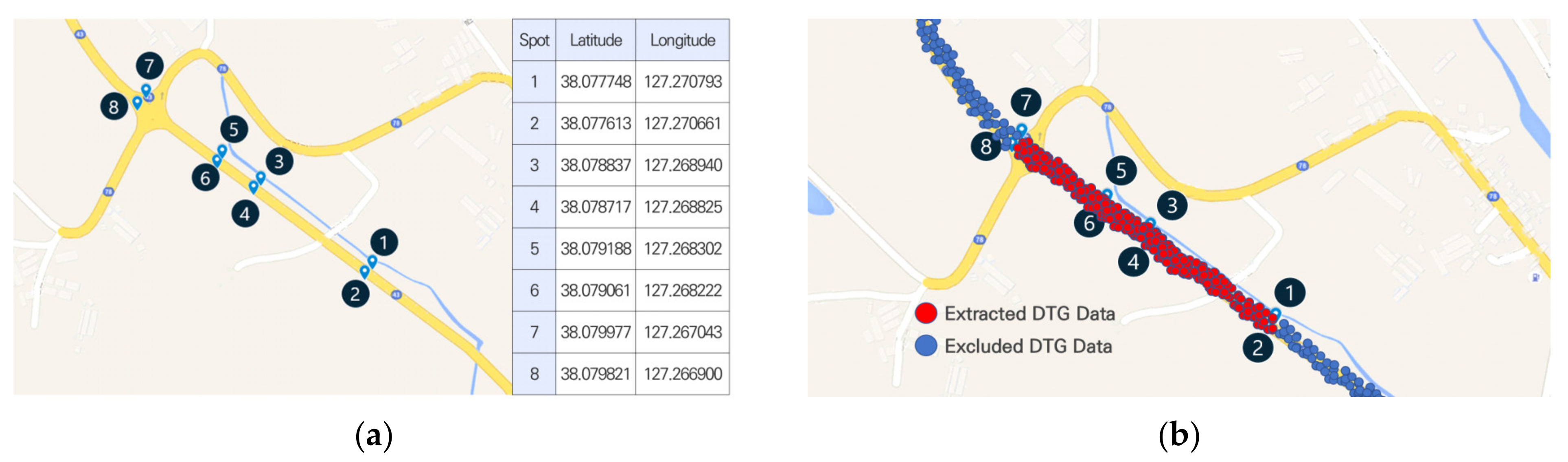
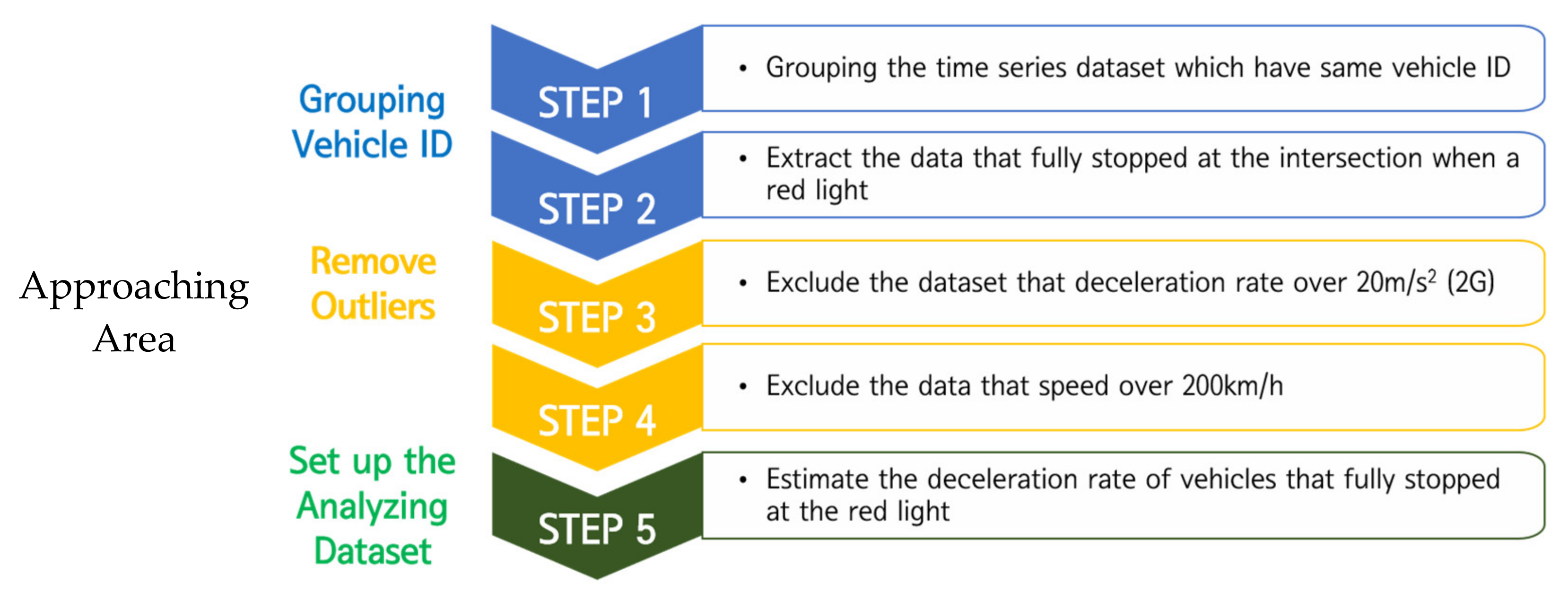
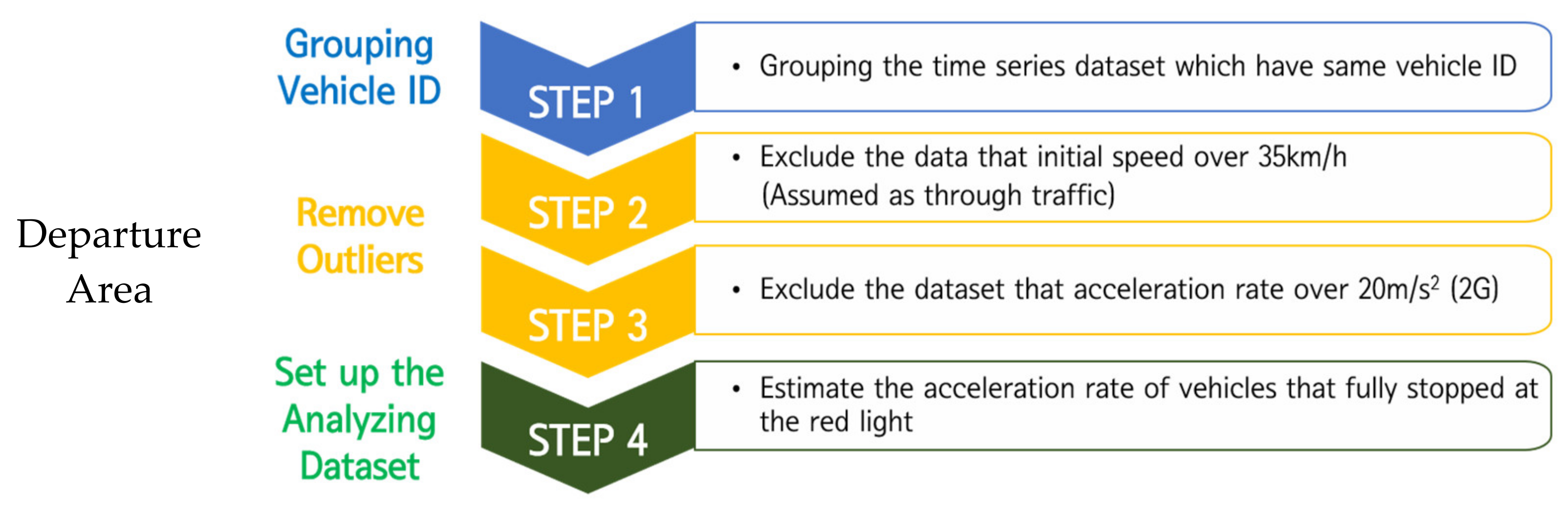
3.3. Data Screening Algorithm
4. Analysis Result
4.1. Collected Data
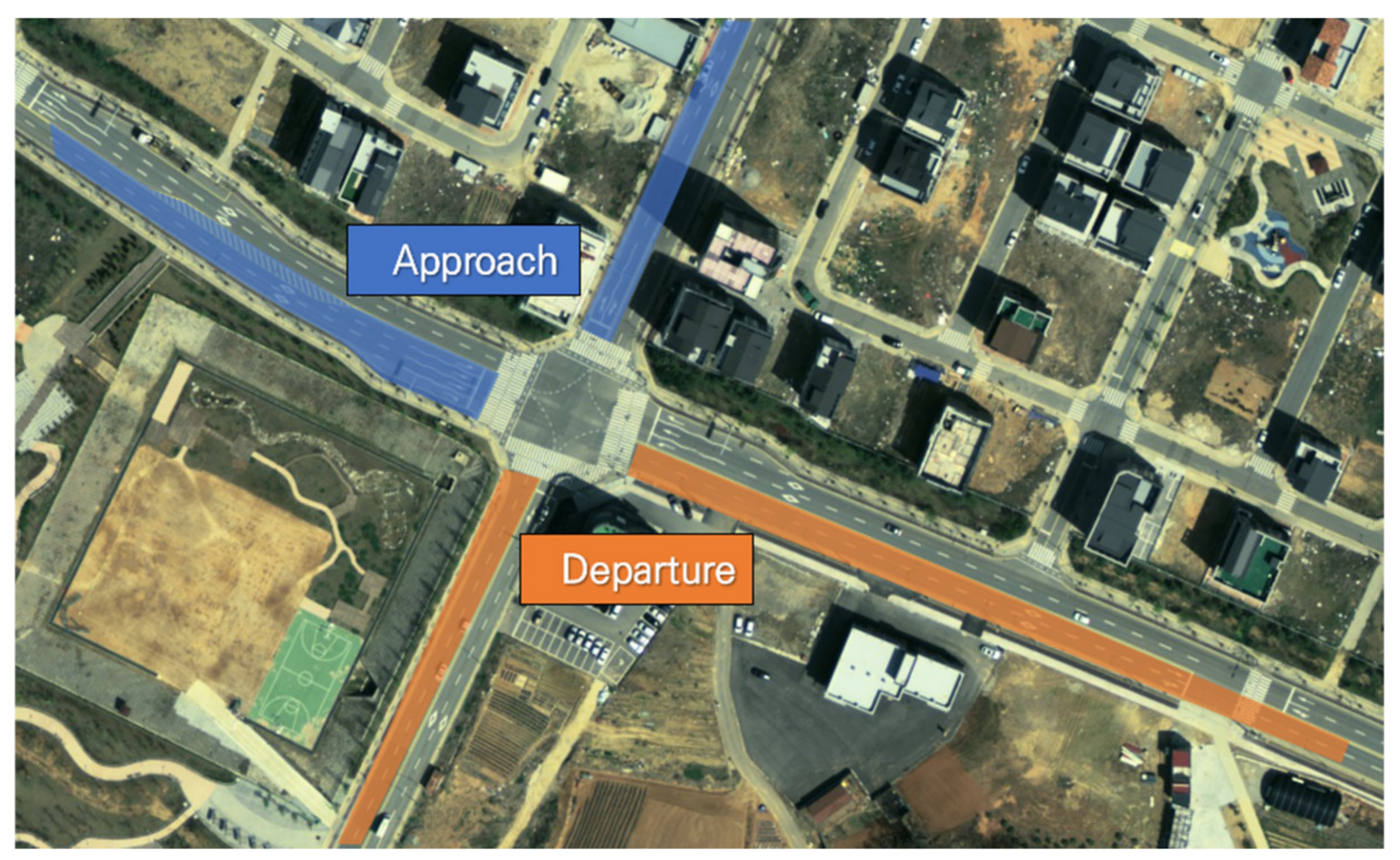
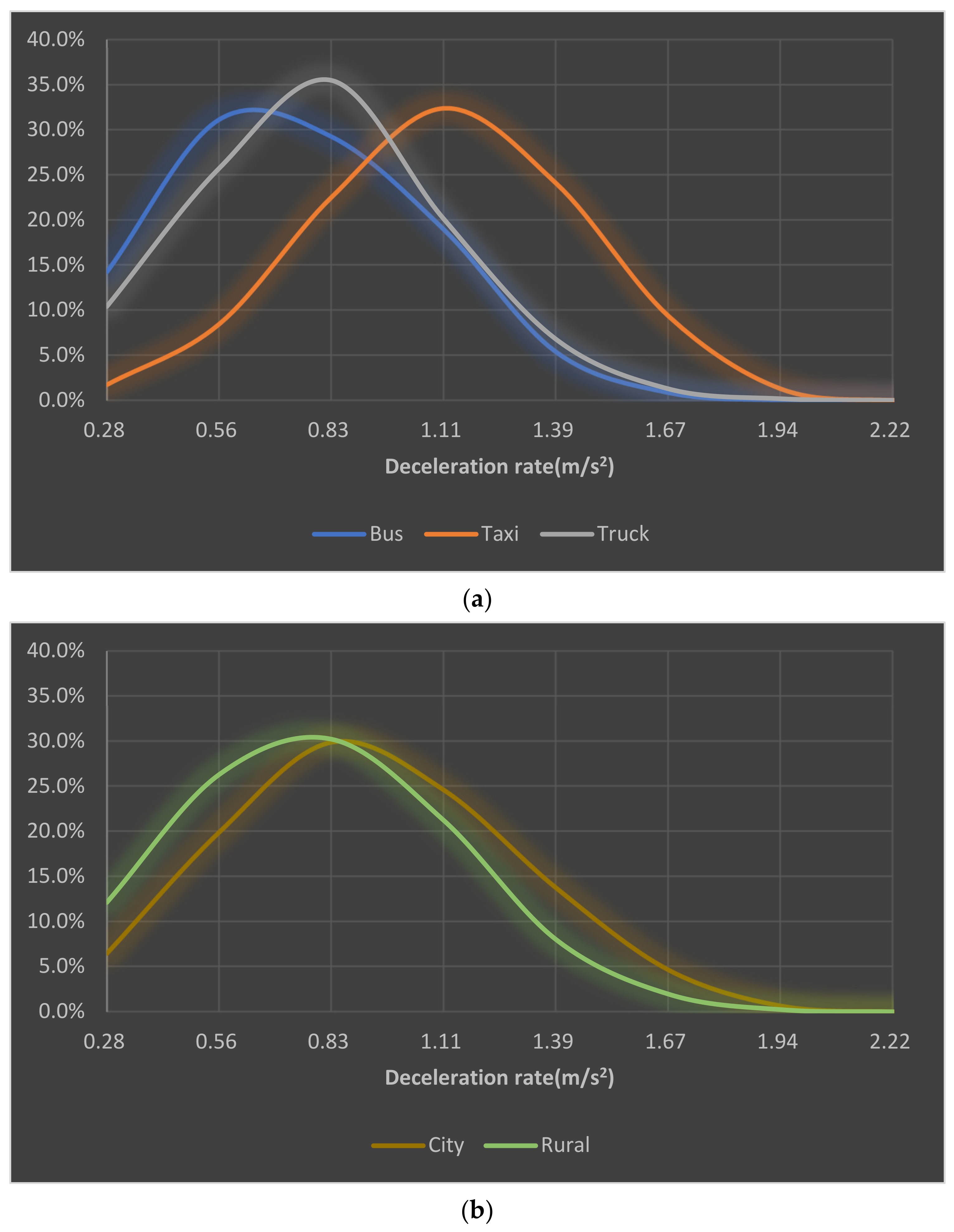
4.2. Approach Area
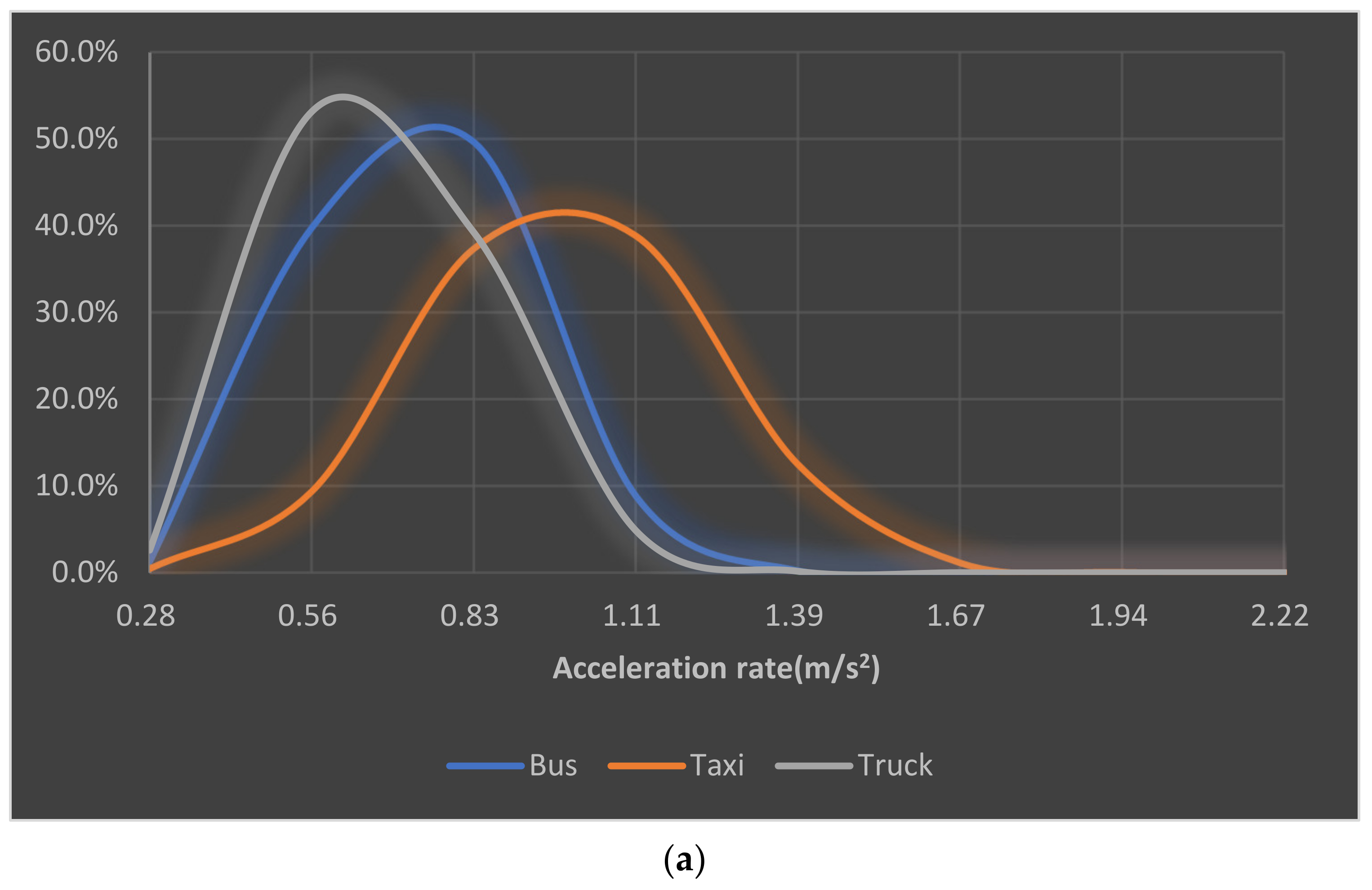
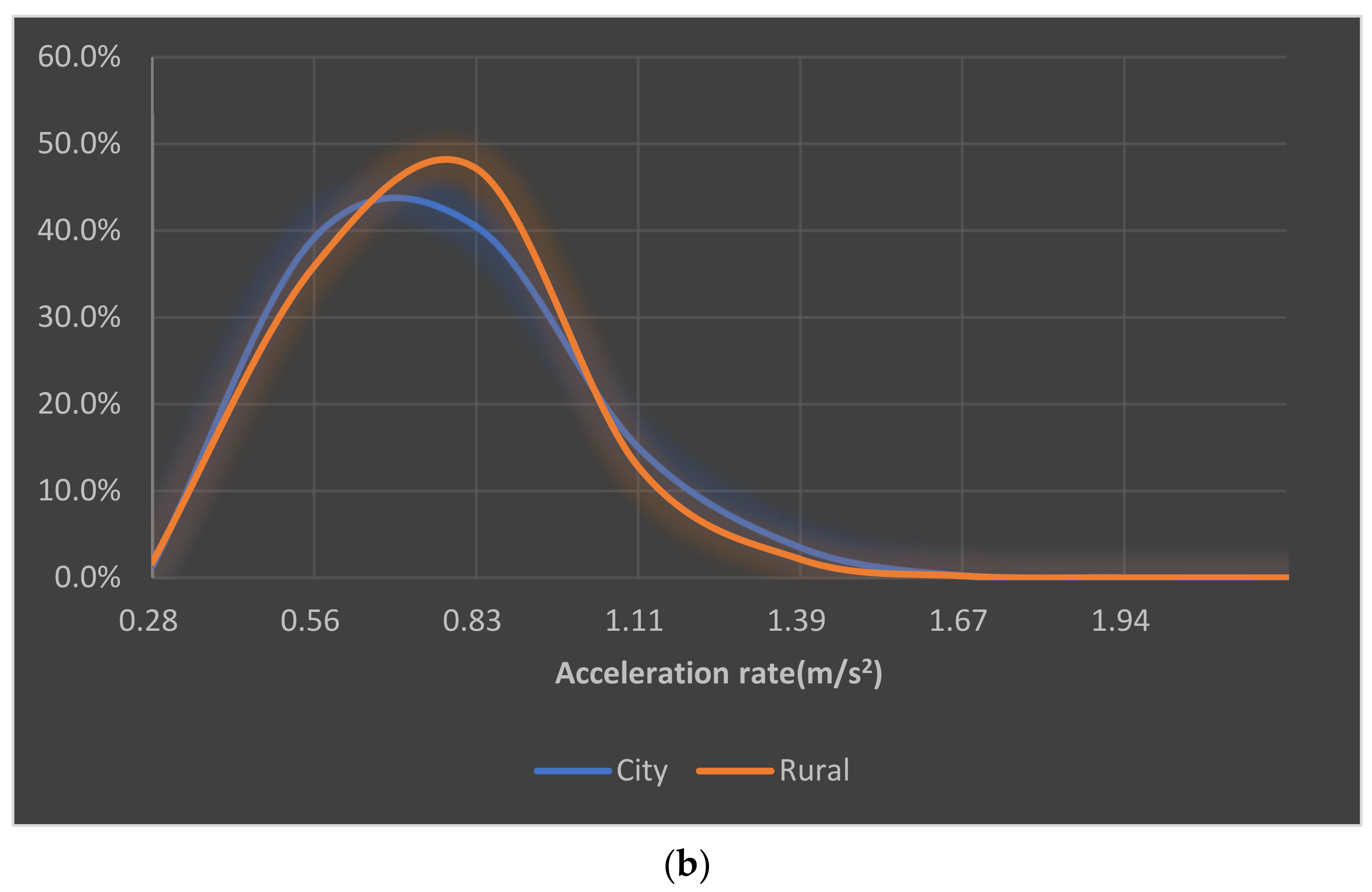
4.3. Departure Area
5. Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ASSHTO. A Policy on Geometric Design of Highways and Streets; ASSHTO: Washington, DC, USA, 2018. [Google Scholar]
- Lee, J. A study of total delay occurrence depending on merging speed from acceleration lane. J. Korea Inst. Intell. Transp. Syst. 2020, 19, 62–73. [Google Scholar] [CrossRef]
- Gowri, A.; Ramaswamy, S. Evaluation of right-turn lanes at signalized intersection in non-lane-based heterogeneous traffic using microscopic simulation model. Transp. Lett. 2015, 7, 61–72. [Google Scholar] [CrossRef]
- Mondal, S.; Gupta, A. Queue-based headway distribution models at signal controlled intersection under mixed traffic. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 768–778. [Google Scholar] [CrossRef]
- Bokare, P.S.; Maurya, A.K. Acceleration-deceleration Behaviour of Various Vehicle Types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]
- Patil, G.R.; Pawar, D.S. Microscopic Analysis of Traffic Behavior at Unsignalized Intersections in Developing World. Transp. Lett. 2016, 8, 158–166. [Google Scholar] [CrossRef]
- MOLIT. Explanation of Korean Rules about the Road Structure and Facilities Standard; MOLIT: Sejong, Korea, 2020. [Google Scholar]
- Junhyung, L.; Shin, C.-H.; Youngjin, K.; Seungmin, K. Automatic detection of the access-restricted sections based on geographic characteristics of at-grade intersections in high definition maps. Korea Spat. Plan. Rev. 2019, 103, 27–39. [Google Scholar] [CrossRef]
- Institute of Transportation Engineering. Transportation and Land Development, 2nd ed.; Institute of Transportation Engineering: Washington, DC, USA, 2002. [Google Scholar]
- TRB. Access Management Manual, 2nd ed.; TRB: Washington, DC, USA, 2014. [Google Scholar]
- Akcelik, R.; Biggs, D. Acceleration profile models for vehicles in road traffic. Trans. Sci. 1987, 21, 36–54. [Google Scholar] [CrossRef]
- Arasan, V.T.; Koshy, R.Z. Methodology for modeling highly heterogeneous traffic flow. J. Transp. Eng. 2005, 131, 544–551. [Google Scholar] [CrossRef]
- Bennett, C.R.; Dunn, R.C.M. Driver Deceleration Behavior on a Freeway in New Zealand. Transp. Res. Record 1995, 1510, 70–74. [Google Scholar]
- Bonneson, J.A. Modeling queued driver behavior at signalized junctions. Transp. Res. Record 1992, 1365, 99–107. [Google Scholar]
- Dey, P.P.; Biswas, P. Acceleration of queue leaders at signalized intersections. Indian Highways 2011, 39, 49–54. [Google Scholar]
- Gattis, J.L.; Bryant, M.A.; Duncan, L.K. Truck acceleration speeds and distances at weigh stations. Transp. Res. Rec. 2010, 2195, 20–26. [Google Scholar] [CrossRef]
- Glauz, W.D.; Harwood, D.W.; John, A.D. Projected Vehicle Characteristics through 1995. Transp. Res. Rec. J. Transp. Res. Board 1980, 772, 37–44. [Google Scholar]
- Long, G. Acceleration characteristics of starting vehicles. Transp. Res. Rec. J. Transp. Res. Board 2000, 1737, 58–70. [Google Scholar] [CrossRef] [Green Version]
- Mondal, S.; Gupta, A. Evaluation of driver Acceleration/Deceleration behavior at signalized intersections using vehicle trajectory data. Transp. Lett. 2022, 1–13. [Google Scholar] [CrossRef]
- Rao, S.K.; Madugula, M.S. Acceleration characteristics of automobiles in the determination of sight distance at stop-controlled intersections. Civil Eng. Pract. Design Eng. 1986, 5, 487–498. [Google Scholar]
- Searle, J. Equations for Speed, Time and Distance for Vehicles under Maximum Acceleration; SAE Technical Paper Series, SP-1433:1-7; SAE: Warrendale, PA, USA, 1999. [Google Scholar]
- Samuels, S.E.; Jarvis, J. Acceleration and Deceleration of Modern Vehicles; Australian Road Research Report 86; Australian Road Research Board: Vermont South, VIC, Australia, 1978. [Google Scholar]
- Wang, J.; Dixon, K.K.; Li, H.; Ogle, J. Normal acceleration behavior of passenger vehicles starting from rest at all-way stop-controlled intersections. Transp. Res. Rec. 2004, 1883, 158–166. [Google Scholar] [CrossRef]
- Wang, J.; Dixon, K.K.; Li, H.; Ogle, J. Normal deceleration behavior of passenger vehicles at stop sign–controlled intersections evaluated with in-vehicle Global Positioning System data. Transp. Res. Rec. 2005, 1937, 120–127. [Google Scholar] [CrossRef]
- Fildes, B. Older drivers’ safety and mobility: Current and future issues. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 307–308. [Google Scholar] [CrossRef]
- Snare, M. Dynamic Model for Predicting Maximum and Typical Acceleration Rates of Passenger Vehicles. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2002. [Google Scholar]
- TRB. Highway Capacity Manual; TRB: Washington, DC, USA, 2010. [Google Scholar]
- TRB. Determination of Stopping Sight Distances; TRB: Washington, DC, USA, 1997. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Speed (km/h) | 70 | 63 | 60 | 55 | 51 | 50 | 45 | 42 | 40 | 35 | 30 | 28 | 20 |
| Average Acceleration Rate (m/s2) | 0.28 | 0.34 | 0.36 | 0.41 | 0.46 | 0.47 | 0.54 | 0.59 | 0.63 | 0.74 | 0.88 | 0.95 | 1.38 |
| Mainline Design Speed (km/h) | 120 | 110 | 100 | 90 | 80 | 70 | 60 | ||
|---|---|---|---|---|---|---|---|---|---|
| Ramp Design Speed (km/h) | 80 | Deceleration Lane Length (m) | 120 | 105 | 85 | 60 | - | - | - |
| 245 | 120 | 55 | |||||||
| 70 | 140 | 120 | 100 | 75 | 55 | - | - | ||
| 335 | 210 | 145 | 50 | - | - | - | |||
| 60 | 155 | 140 | 120 | 100 | 80 | 55 | - | ||
| 400 | 285 | 220 | 130 | 55 | - | - | |||
| 50 | Acceleration Lane Length (m) | 170 | 150 | 135 | 110 | 90 | 70 | 50 | |
| 445 | 330 | 265 | 175 | 100 | 50 | - | |||
| 40 | 175 | 160 | 145 | 120 | 100 | 85 | 65 | ||
| 470 | 360 | 300 | 210 | 135 | 85 | - | |||
| 30 | 185 | 170 | 155 | 135 | 115 | 95 | 80 | ||
| 500 | 390 | 330 | 240 | 165 | 110 | 70 | |||
| Mainline Design Speed | Design Speed on Ramp | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Stop Condition | 20 km/h | 30 km/h | 40 km/h | 50 km/h | 60 km/h | 70 km/h | 80 km/h | |||
| Initial Vehicle Speed on Ramp | ||||||||||
| Design Speed | Merge/Diverge Speed | 0 km/h | 20 km/h | 28 km/h | 35 km/h | 42 km/h | 51 km/h | 63 km/h | 70 km/h | |
| Deceleration Lane Length (m) | 50 km/h | 47 km/h | 75 m | 70 m | 60 m | 45 m | - | - | - | - |
| 37 km/h | 60 m | 50 m | 30 m | - | - | - | - | - | ||
| 60 km/h | 55 km/h | 95 m | 90 m | 80 m | 65 m | 55 m | - | - | - | |
| 45 km/h | 95 m | 80 m | 65 m | 45 m | - | - | - | - | ||
| 70 km/h | 63 km/h | 110 m | 105 m | 95 m | 85 m | 70 m | 55 m | - | - | |
| 53 km/h | 150 m | 130 m | 110 m | 90 m | 65 m | - | - | - | ||
| 80 km/h | 70 km/h | 130 m | 125 m | 115 m | 100 m | 90 m | 80 m | 55 m | - | |
| 60 km/h | 200 m | 180 m | 165 m | 145 m | 115 m | 65 m | - | - | ||
| Acceleration Lane Length (m) | 90 km/h | 77 km/h | 145 m | 140 m | 135 m | 120 m | 110 m | 100 m | 75 m | 60 m |
| 67 km/h | 260 m | 245 m | 225 m | 205 m | 175 m | 125 m | 35 m | - | ||
| 100 km/h | 85 km/h | 170 m | 165 m | 155 m | 145 m | 135 m | 120 m | 100 m | 85 m | |
| 74 km/h | 345 m | 325 m | 305 m | 285 m | 255 m | 205 m | 110 m | 40 m | ||
| 110 km/h | 91 km/h | 180 m | 180 m | 170 m | 160 m | 150 m | 140 m | 120 m | 105 m | |
| 81 km/h | 430 m | 410 m | 390 m | 370 m | 340 m | 290 m | 200 m | 125 m | ||
| 120 km/h | 98 km/h | 200 m | 195 m | 185 m | 175 m | 170 m | 155 m | 140 m | 120 m | |
| 88 km/h | 545 m | 530 m | 515 m | 490 m | 460 m | 410 m | 325 m | 245 m | ||
| 130 km/h | 103 km/h | 215 m | 210 m | 205 m | 195 m | 185 m | 170 m | 155 m | 135 m | |
| 92 km/h | 610 m | 580 m | 550 m | 530 m | 520 m | 500 m | 375 m | 300 m | ||
| Design Speed (km/h) | Road Access Restricted Distance (m) | |
|---|---|---|
| Urban | Rural | |
| 50 | 25 | 40 |
| 60 | 40 | 60 |
| 70 | 60 | 85 |
| 80 | 70 | 100 |
| No. | Description | Type | Unit |
|---|---|---|---|
| 1 | Vehicle ID | String | - |
| 2 | Vehicle Type Code | String | Bus/Truck/Taxi/Etc. |
| 3 | Speed | Integer | km/h |
| 4 | Engine Revolution | Integer | RPM |
| 5 | Break Signal | Binary | On (1)/Off (0) |
| 6 | GPS Longitude | Integer | WGS84 (00.000000) |
| 7 | GPS Latitude | Integer | WGS84 (000.000000) |
| 8 | Heading | Integer | Degree |
| 9 | Longitude Acceleration | Integer | m/s2 (1 decimal place) |
| 10 | Latitude Acceleration | Integer | m/s2 (1 decimal place) |
| 11 | Date | Integer | YYMMDD hhmmssss (0.01 s) |
| Approaching | Departure | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| City | Rural | City | Rural | Rural | ||||||||||
| # | Latitude | Longitude | # | Latitude | Longitude | # | Latitude | Longitude | # | Latitude | Longitude | # | Latitude | Longitude |
| 1 | 37.72394 | 127.0976 | 1 | 37.18925 | 127.5607 | 1 | 37.88737 | 127.1944 | 1 | 37.14497 | 127.5859 | 21 | 37.29773 | 127.2334 |
| 2 | 37.71236 | 127.1063 | 2 | 37.14929 | 127.5792 | 2 | 37.74994 | 127.0846 | 2 | 38.09039 | 127.08 | 22 | 37.11436 | 127.428 |
| 3 | 37.64546 | 127.1287 | 3 | 36.96333 | 127.8685 | 3 | 37.64594 | 127.1285 | 3 | 38.07761 | 127.2707 | 23 | 38.03541 | 127.2626 |
| 4 | 37.75593 | 127.0812 | 4 | 36.91914 | 127.9448 | 4 | 37.73332 | 126.7306 | 4 | 37.98989 | 127.2425 | 24 | 37.98027 | 127.2444 |
| 5 | 37.63339 | 126.8251 | 5 | 38.08305 | 127.2653 | 5 | 37.73571 | 126.7379 | 5 | 37.90179 | 127.2093 | 25 | 37.12298 | 126.9041 |
| 6 | 37.44244 | 126.7788 | 6 | 38.07767 | 127.2711 | 6 | 37.73288 | 126.7306 | 6 | 37.84019 | 127.1561 | 26 | 37.03031 | 127.9245 |
| 7 | 37.03973 | 127.0685 | 7 | 38.07764 | 127.2707 | 7 | 37.72938 | 126.7237 | 7 | 37.83776 | 127.2877 | 27 | 36.93195 | 128.2054 |
| 8 | 37.97938 | 127.2444 | 8 | 37.72857 | 126.7291 | 8 | 38.01607 | 127.1509 | 28 | 36.85829 | 127.9231 | |||
| 9 | 37.94273 | 127.2329 | 9 | 36.9791 | 126.931 | 9 | 38.02147 | 127.1833 | 29 | 36.83129 | 127.77 | |||
| 10 | 37.90797 | 127.2127 | 10 | 37.35839 | 126.7312 | 10 | 38.04843 | 127.3675 | 30 | 36.9852 | 126.9345 | |||
| 11 | 37.17683 | 126.9398 | 11 | 37.35166 | 126.7283 | 11 | 38.02462 | 127.3628 | 31 | 37.77306 | 127.4562 | |||
| 12 | 37.83117 | 127.2911 | 12 | 37.3145 | 126.8521 | 12 | 37.97296 | 127.3216 | 32 | 37.04245 | 127.3603 | |||
| 13 | 38.01835 | 127.1597 | 13 | 37.271 | 127.0628 | 13 | 37.71588 | 127.4075 | 33 | 37.55244 | 126.675 | |||
| 14 | 37.90043 | 127.2083 | 14 | 37.32441 | 126.8045 | 14 | 37.01141 | 126.9937 | 34 | 37.55195 | 126.6798 | |||
| 15 | 37.76978 | 127.4483 | 15 | 37.40899 | 126.8238 | 15 | 37.0232 | 127.3295 | 35 | 37.48959 | 126.6473 | |||
| 16 | 37.04685 | 127.3636 | 16 | 37.01965 | 127.0716 | 16 | 37.34237 | 127.4901 | 36 | 37.49089 | 126.648 | |||
| 17 | 37.44091 | 127.2634 | 17 | 37.03354 | 127.0701 | 17 | 36.959 | 127.0651 | 37 | 37.17142 | 127.3566 | |||
| 18 | 37.11088 | 127.4305 | 18 | 37.06642 | 127.0641 | 18 | 36.96051 | 127.0661 | 38 | 36.3062 | 127.5749 | |||
| 19 | 37.22813 | 127.3023 | 19 | 36.96691 | 127.0712 | 39 | 36.2925 | 127.5665 | ||||||
| 20 | 37.08091 | 127.4366 | 20 | 36.96839 | 127.0719 | 40 | 36.16964 | 127.7732 | ||||||
| 41 | 37.0067 | 127.0782 | ||||||||||||
| 42 | 37.03691 | 127.0716 | ||||||||||||
| Area | Vehicle Type | |||
|---|---|---|---|---|
| Bus + Taxi + Truck | Bus | Taxi | Truck | |
| Urban + Rural | Case 1 | Case 2 | Case 3 | Case 4 |
| Urban | Case 5 | Case 6 | Case 7 | Case 8 |
| Rural | Case 9 | Case 10 | Case 11 | Case 12 |
| Case (Vehicle, Area) | Deceleration Rate (m/s2) | Total | Avg. | Max. | 90th mPCTL | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.28 | 0.56 | 0.83 | 1.11 | 1.39 | 1.67 | 1.94 | 2.22 | |||||
| Case 1 (All, All) | 1820 | 4392 | 5580 | 4191 | 1919 | 565 | 74 | 1 | 18,542 | 0.74 | 1.97 | 1.20 |
| Case 2 (Bus, All) | 995 | 2172 | 2039 | 1322 | 375 | 61 | 4 | 0 | 6968 | 0.63 | 1.76 | 1.04 |
| Case 3 (Taxi, All) | 77 | 372 | 989 | 1421 | 1056 | 411 | 57 | 1 | 4384 | 0.99 | 1.97 | 1.41 |
| Case 4 (Truck, All) | 748 | 1848 | 2552 | 1448 | 488 | 93 | 13 | 0 | 7190 | 0.68 | 1.88 | 1.09 |
| Case 5 (All, Urban) | 490 | 1506 | 2260 | 1859 | 1039 | 352 | 50 | 1 | 7557 | 0.80 | 1.97 | 1.28 |
| Case 6 (Bus, Urban) | 321 | 862 | 905 | 447 | 89 | 13 | 0 | 0 | 2637 | 0.62 | 1.57 | 0.98 |
| Case 7 (Taxi, Urban) | 57 | 316 | 837 | 1192 | 882 | 333 | 48 | 1 | 3666 | 0.98 | 1.97 | 1.41 |
| Case 8 (Truck, Urban) | 112 | 328 | 518 | 220 | 68 | 6 | 2 | 0 | 1254 | 0.67 | 1.74 | 1.03 |
| Case 9 (All, Rural) | 1330 | 2886 | 3320 | 2332 | 880 | 213 | 24 | 0 | 10,985 | 0.69 | 1.89 | 1.13 |
| Case 10 (Bus, Rural) | 674 | 1310 | 1134 | 875 | 286 | 48 | 4 | 0 | 4331 | 0.64 | 1.76 | 1.07 |
| Case 11 (Taxi, Rural) | 20 | 56 | 152 | 229 | 174 | 78 | 9 | 0 | 718 | 1.00 | 1.89 | 1.44 |
| Case 12 (Truck, Rural) | 636 | 1520 | 2034 | 1228 | 420 | 87 | 11 | 0 | 5936 | 0.69 | 1.88 | 1.09 |
| Bus | Taxi | Truck | Urban | Rural | |
|---|---|---|---|---|---|
| Variance | 1.21 | 1.39 | 1.21 | 1.56 | 1.40 |
| N | 6968 | 4384 | 7190 | 7557 | 10,985 |
| Degree of Freedom | 14,156 | 8757 | 15,644 | ||
| F | 1.00 | 1.15 | 1.12 | ||
| P (F ≤ f) One-tail | 0.48 | 8.4 × 10−8 | 6.53 × 10−8 | ||
| F Critical One-tail | 1.04 | 1.05 | 1.04 | ||
| T Statistic | −10.64 | 49.26 | 22.71 | ||
| P (T ≤ t) One-tail | 1.23 × 10−26 | 0 | 1.3 × 10−112 | ||
| T Critical One-tail | 1.64 | 1.65 | 1.64 | ||
| P (T ≤ t) Two-tail | 2.46 × 10−26 | 0 | 2.5 × 10−112 | ||
| T Critical Two-tail | 1.96 | 1.96 | 1.96 |
| Case (Vehicle, Area) | Acceleration Rate (m/s2) | Total | Avg. | Max. | 90th PCTL | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.28 | 0.56 | 0.83 | 1.11 | 1.39 | 1.67 | 1.94 | 2.22 | |||||
| Case 1 (All, All) | 431 | 10,175 | 11,810 | 3766 | 765 | 67 | 5 | 0 | 27,019 | 0.64 | 1.90 | 0.94 |
| Case 2 (Bus, All) | 176 | 5021 | 6253 | 1111 | 33 | 0 | 0 | 0 | 12,594 | 0.61 | 1.30 | 0.82 |
| Case 3 (Taxi, All) | 30 | 544 | 2154 | 2235 | 718 | 67 | 5 | 0 | 5753 | 0.86 | 1.90 | 1.16 |
| Case 4 (Truck, All) | 225 | 4610 | 3403 | 420 | 14 | 0 | 0 | 0 | 8672 | 0.55 | 1.28 | 0.77 |
| Case 5 (All, Urban) | 200 | 5534 | 5703 | 2114 | 494 | 41 | 2 | 0 | 14,088 | 0.65 | 1.86 | 0.96 |
| Case 6 (Bus, Urban) | 107 | 3580 | 3318 | 405 | 4 | 0 | 0 | 0 | 7414 | 0.58 | 1.28 | 0.78 |
| Case 7 (Taxi, Urban) | 21 | 417 | 1561 | 1635 | 490 | 41 | 2 | 0 | 4167 | 0.85 | 1.86 | 1.15 |
| Case 8 (Truck, Urban) | 72 | 1537 | 824 | 74 | 0 | 0 | 0 | 0 | 2507 | 0.52 | 1.11 | 0.71 |
| Case 9 (All, Rural) | 231 | 4649 | 6098 | 1651 | 273 | 26 | 3 | 0 | 12,931 | 0.64 | 1.90 | 0.91 |
| Case 10 (Bus, Rural) | 69 | 1449 | 2924 | 709 | 29 | 0 | 0 | 0 | 5180 | 0.65 | 1.30 | 0.88 |
| Case 11 (Taxi, Rural) | 9 | 127 | 595 | 596 | 230 | 26 | 3 | 0 | 1586 | 0.88 | 1.90 | 1.18 |
| Case 12 (Truck, Rural) | 153 | 3073 | 2579 | 346 | 14 | 0 | 0 | 0 | 6165 | 0.56 | 1.28 | 0.78 |
| Bus | Taxi | Truck | Urban | Rural | |
|---|---|---|---|---|---|
| Variance | 0.35 | 0.71 | 0.34 | 0.64 | 0.54 |
| N | 12,594 | 5753 | 8672 | 14,088 | 12,931 |
| Degree of Freedom | 8428 | 18,864 | 27,017 | ||
| F | 0.49 | 1.04 | 1.20 | ||
| P (F ≤ f) One-tail | 0 | 0.03 | 1.82 × 10−25 | ||
| F Critical One-tail | 0.96 | 1.03 | 1.029 | ||
| T Statistic | −73.90 | 24.28 | 3.98 | ||
| P (T ≤ t) One-tail | 0 | 1.6 × 10−128 | 3.52 × 10−5 | ||
| T Critical One-tail | 1.65 | 1.64 | 1.64 | ||
| P (T ≤ t) Two-tail | 0 | 3.3 × 10−128 | 7.03 × 10−5 | ||
| T Critical Two-tail | 1.96 | 1.96 | 1.96 |
| Type | Design Speed (km/h) | 80 | 70 | 60 | 50 | ||
|---|---|---|---|---|---|---|---|
| Approaching Area (m) | Suggestion | Urban | a = 0.98 m/s2 | 193 | 156 | 119 | 87 |
| Rural | a = 1.07 m/s2 | 177 | 143 | 109 | 80 | ||
| MOLIT [7] | 96 | 78 | 60 | 43 | |||
| AASHTO [1] | 130 | 110 | 95 | 75 | |||
| Departure Area (m) | Suggestion | Urban | a = 0.71 m/s2 | 196 | 153 | 110 | 74 |
| Rural | a = 0.78 m/s2 | 178 | 139 | 100 | 68 | ||
| MOLIT [7] | None | ||||||
| AASHTO [1] | 200 | 150 | 95 | 60 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J. Acceleration and Deceleration Rates in Interrupted Flow Based on Empirical Digital Tachograph Data. Sustainability 2022, 14, 11165. https://doi.org/10.3390/su141811165
Lee J. Acceleration and Deceleration Rates in Interrupted Flow Based on Empirical Digital Tachograph Data. Sustainability. 2022; 14(18):11165. https://doi.org/10.3390/su141811165
Chicago/Turabian StyleLee, Junhyung. 2022. "Acceleration and Deceleration Rates in Interrupted Flow Based on Empirical Digital Tachograph Data" Sustainability 14, no. 18: 11165. https://doi.org/10.3390/su141811165
APA StyleLee, J. (2022). Acceleration and Deceleration Rates in Interrupted Flow Based on Empirical Digital Tachograph Data. Sustainability, 14(18), 11165. https://doi.org/10.3390/su141811165