
A Cooperative Merging Control Method for Freeway Ramps in Connected and Autonomous Driving

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
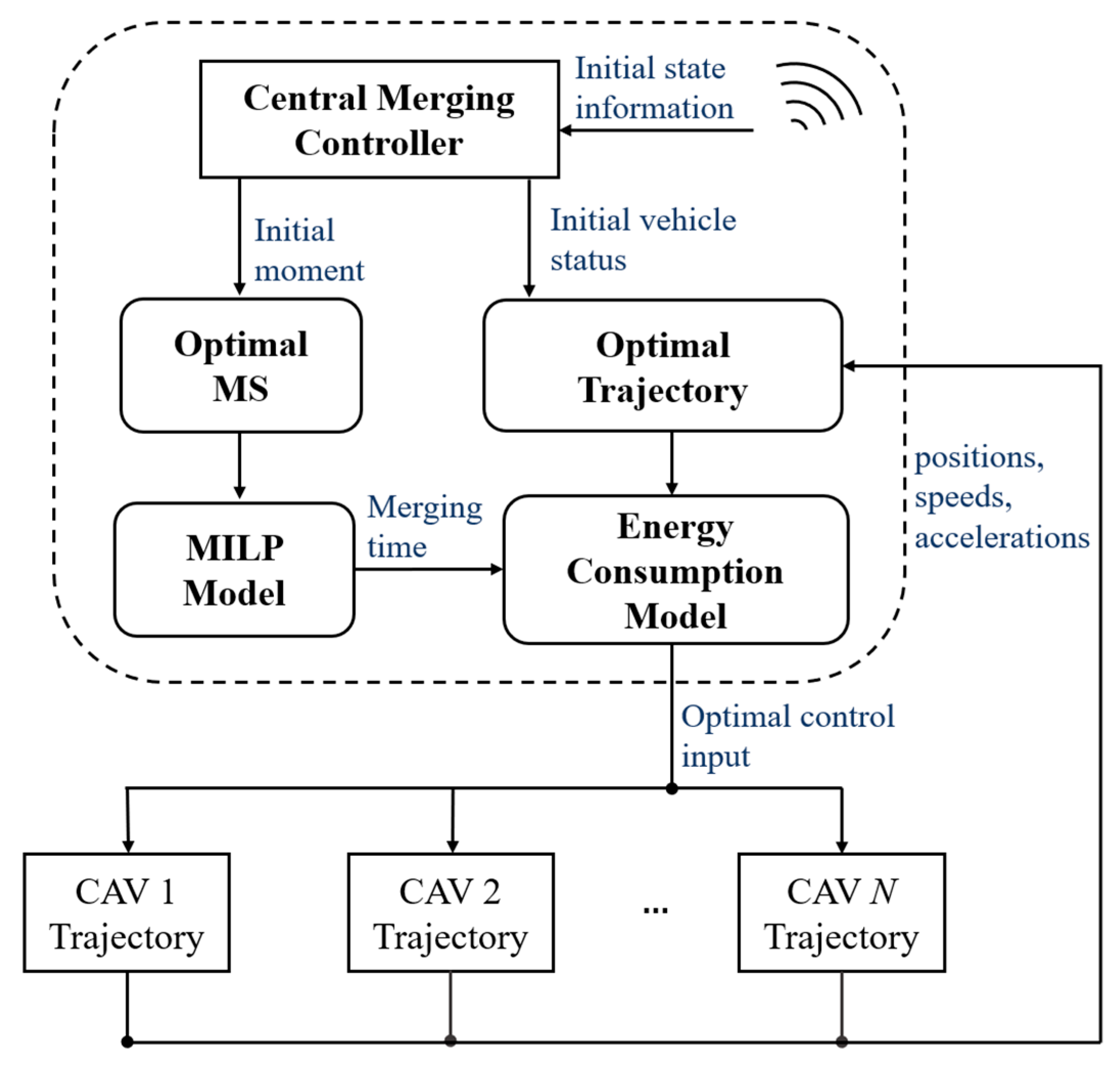
3. System Framework and Methodology
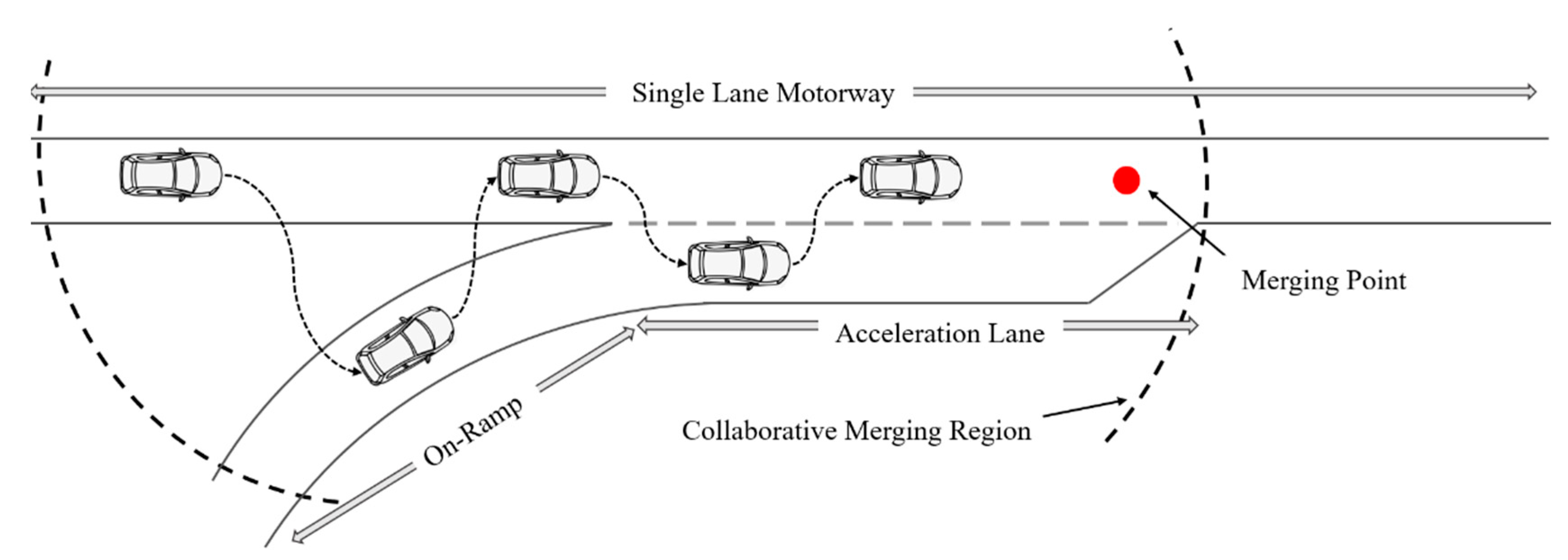
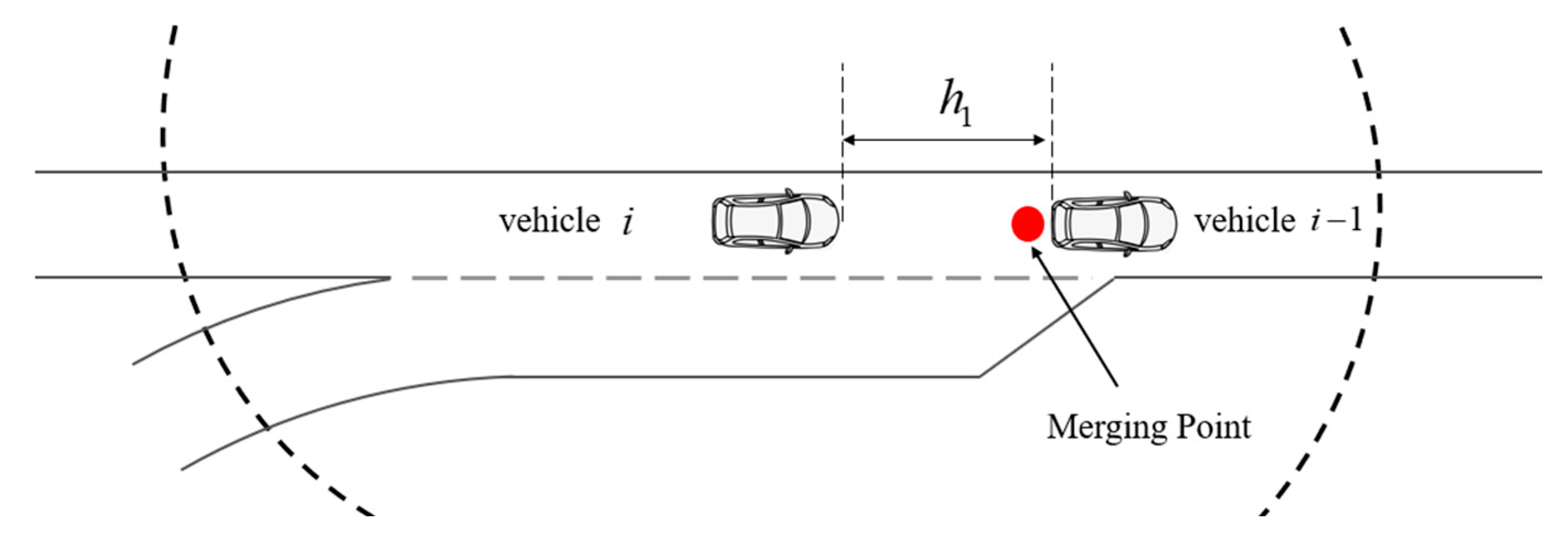
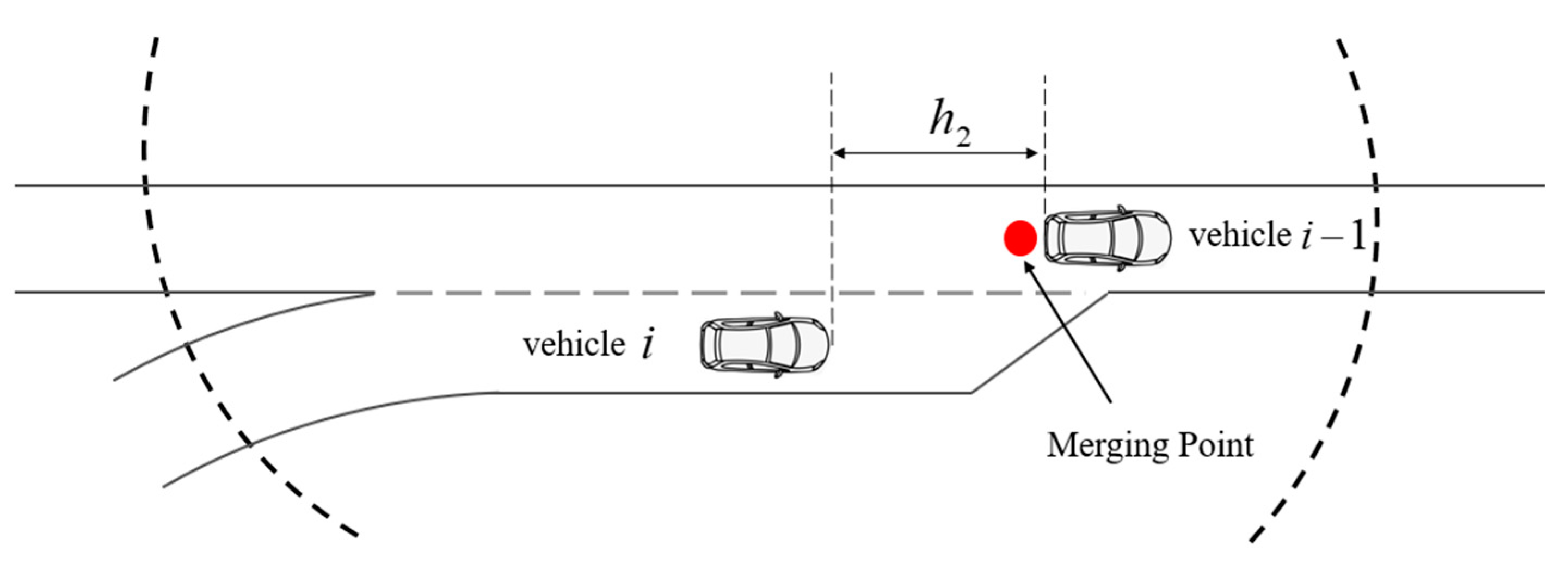
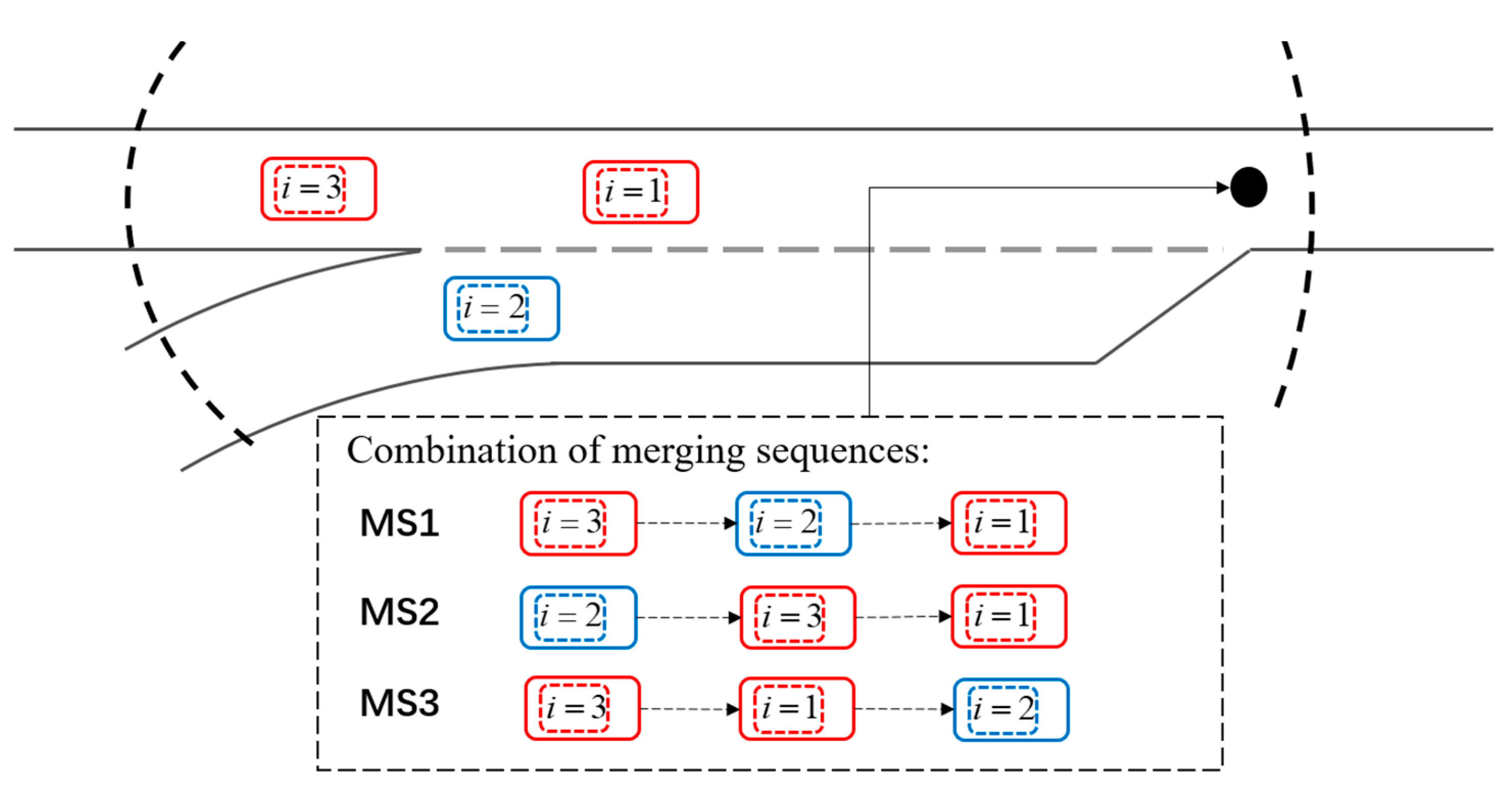
3.1. Problem Formulation
3.2. Optimization Model
3.3. Optimization Analysis Solving
4. Simulation Results and Discussion
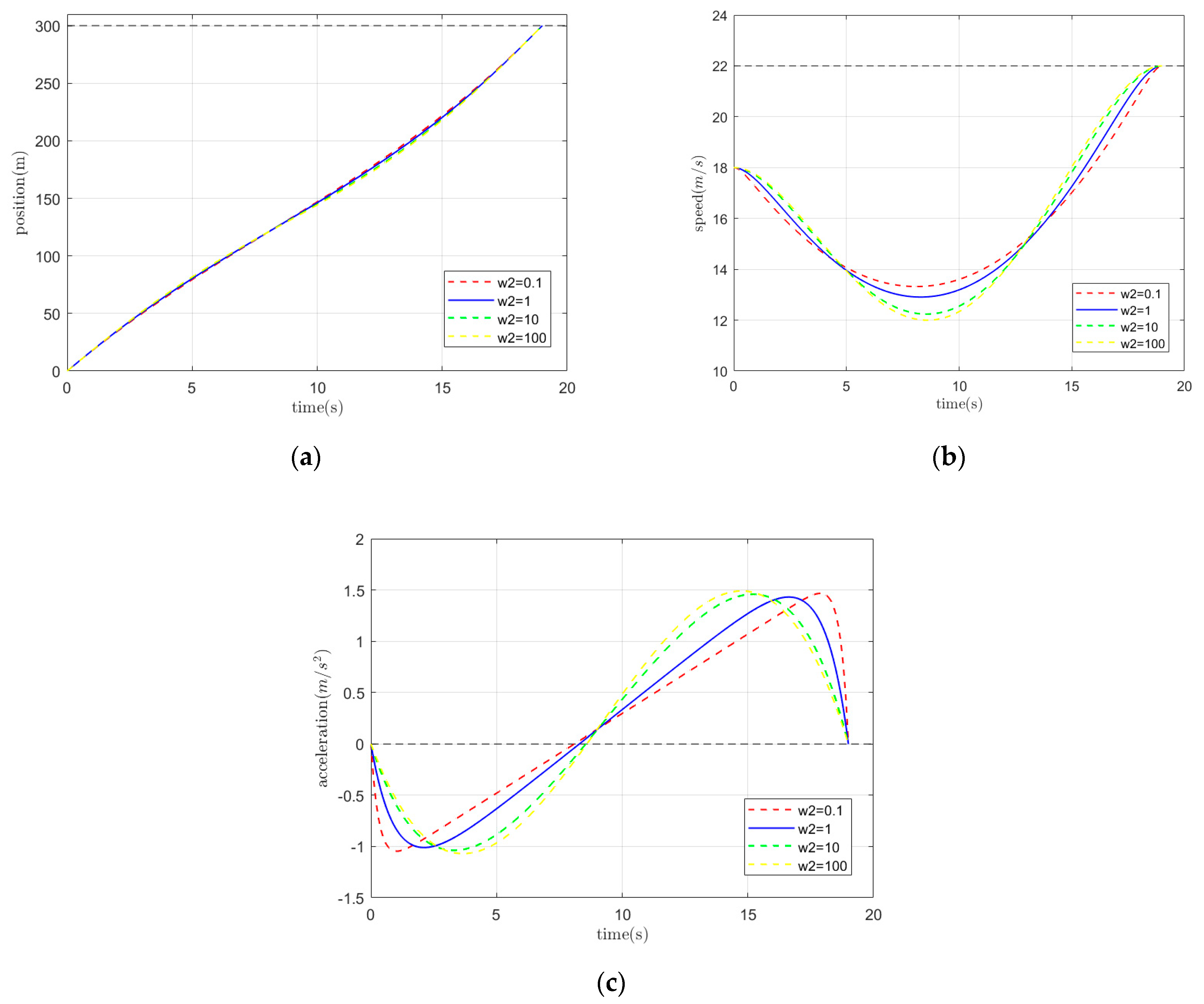
4.1. The Choice of Weights
4.2. Experiment Design
4.3. Analysis of Results
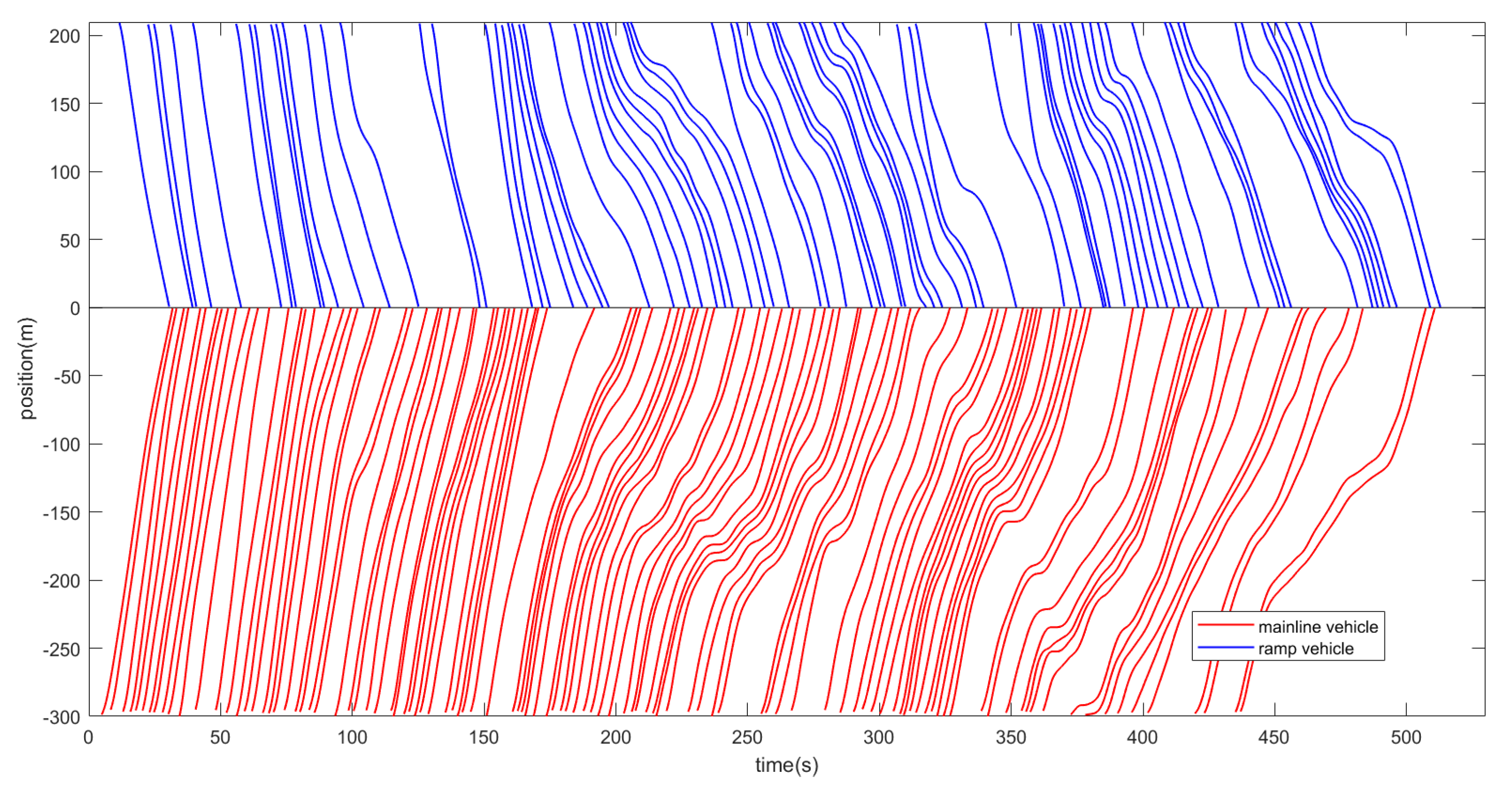
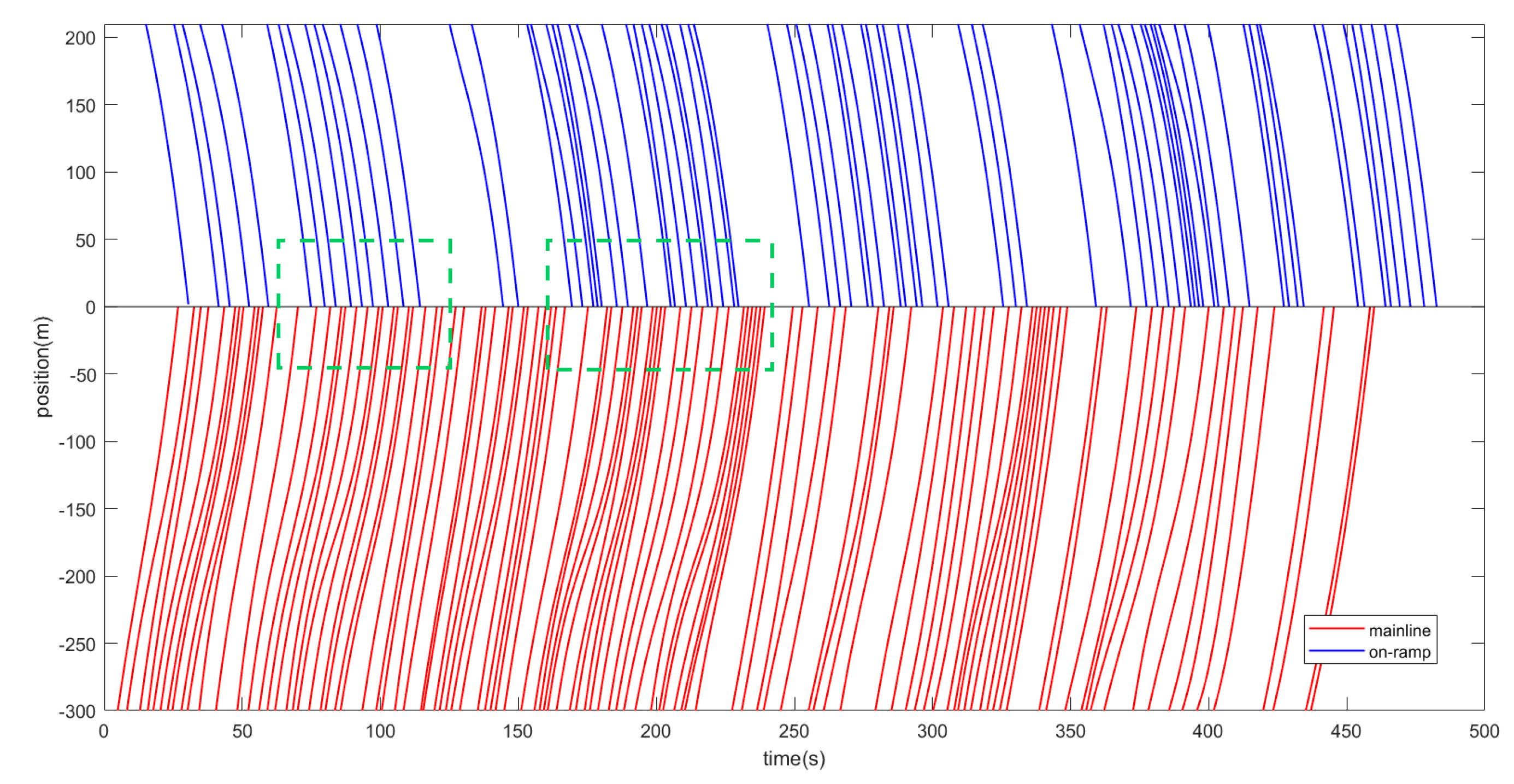
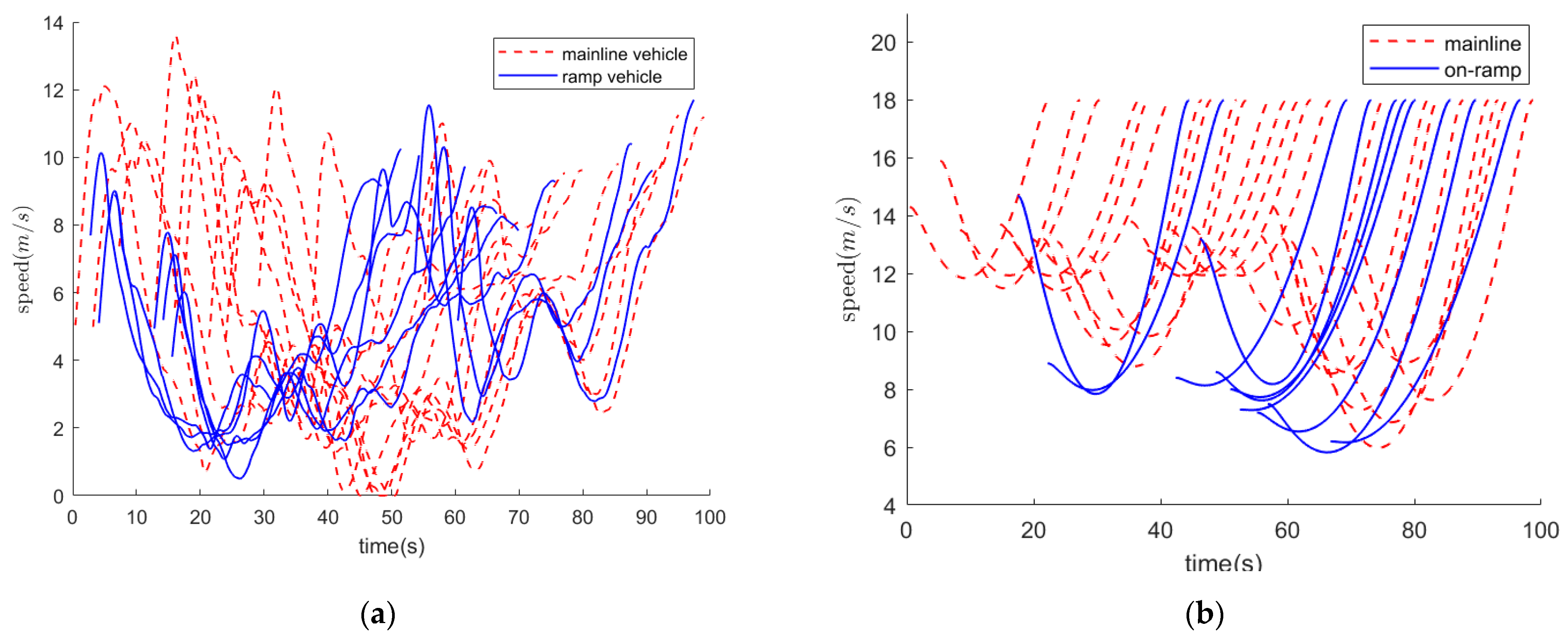
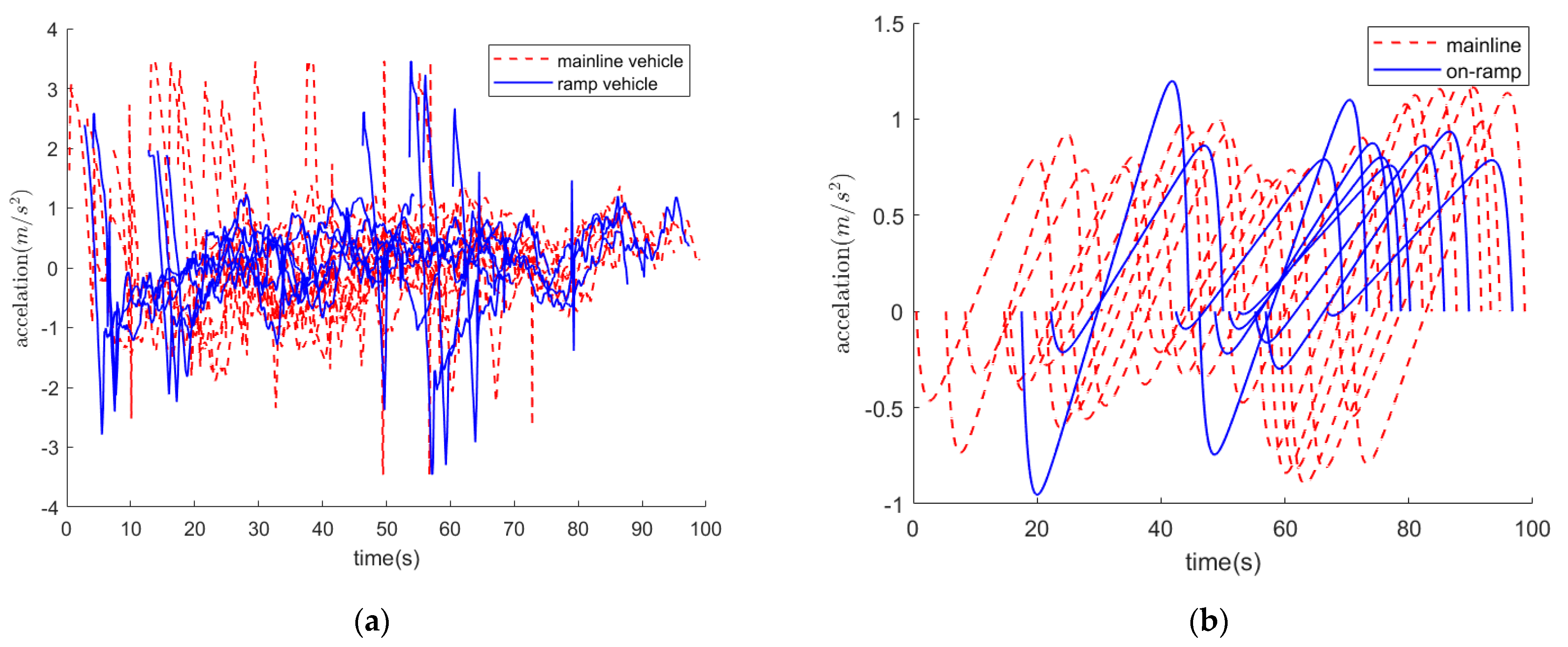
4.3.1. Vehicle Trajectory Evaluation
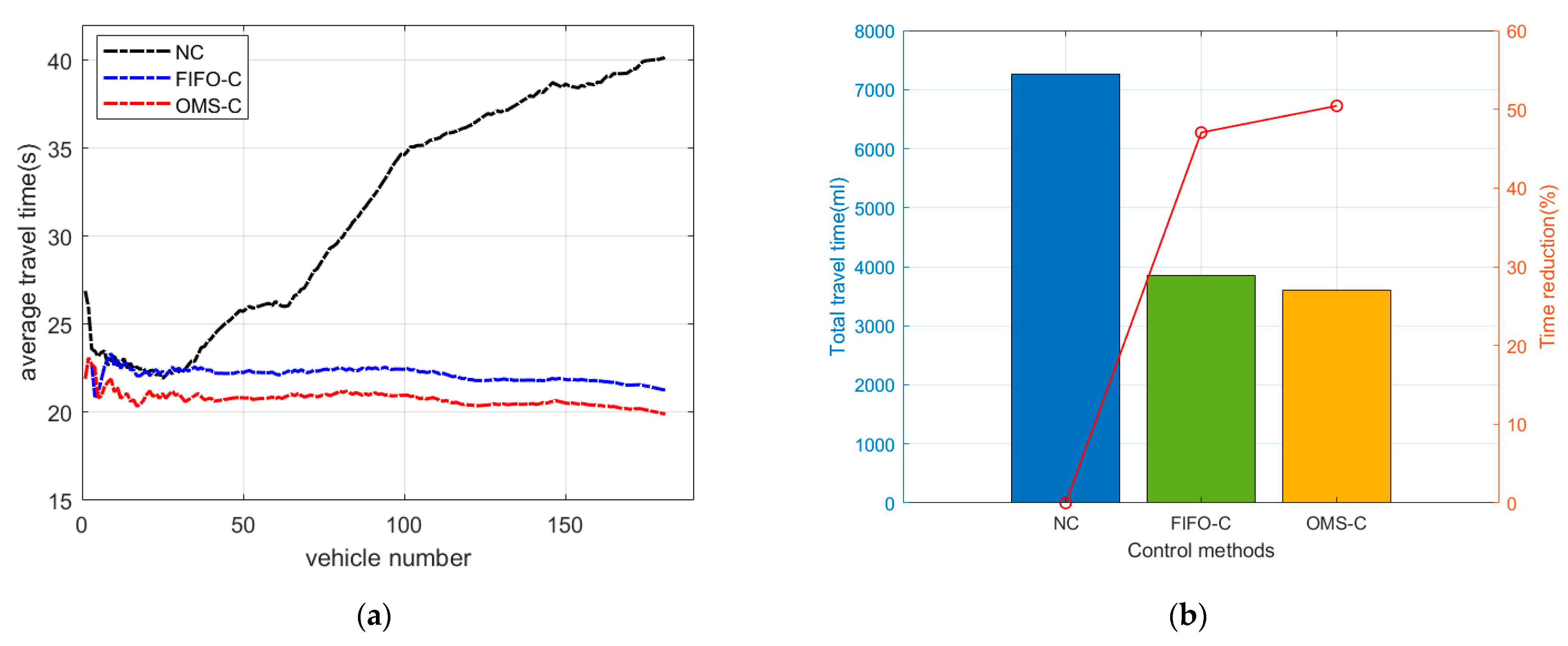
4.3.2. Traffic Indicators Evaluation
5. Application to Traffic Flow Simulation
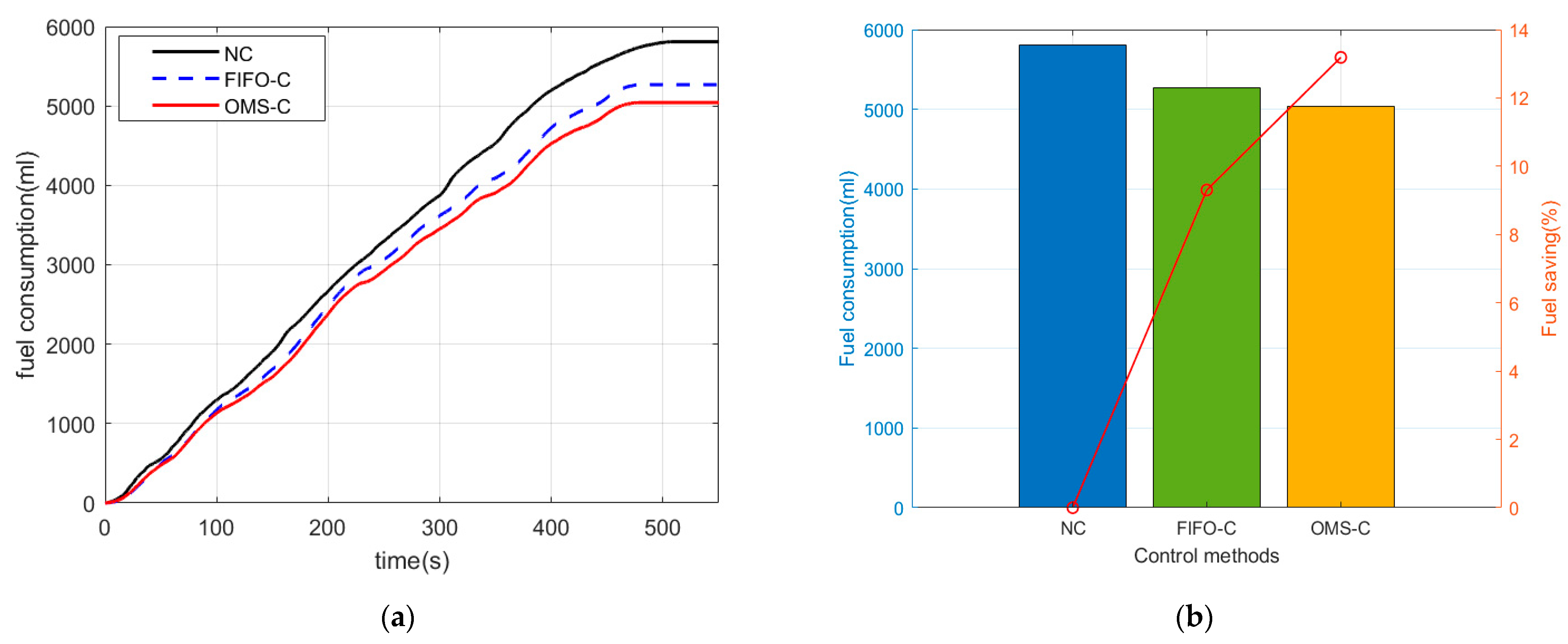
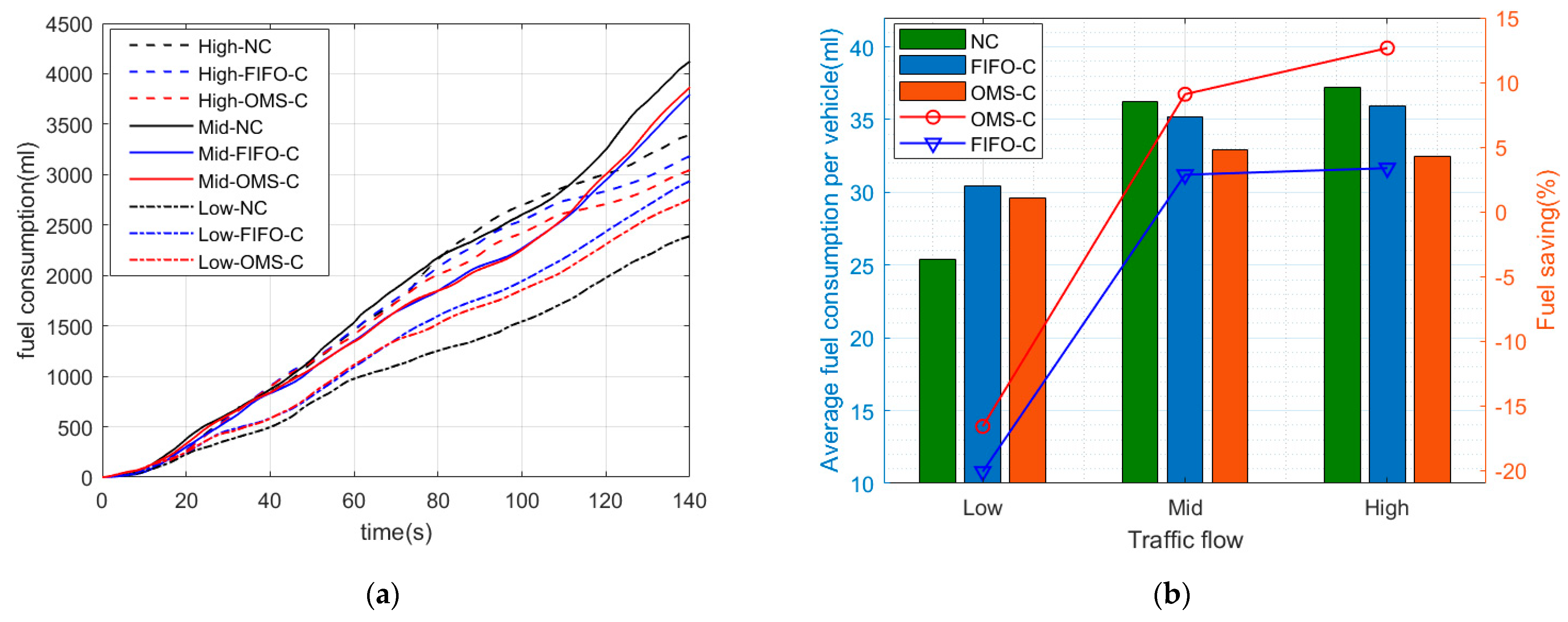
5.1. Energy Consumption
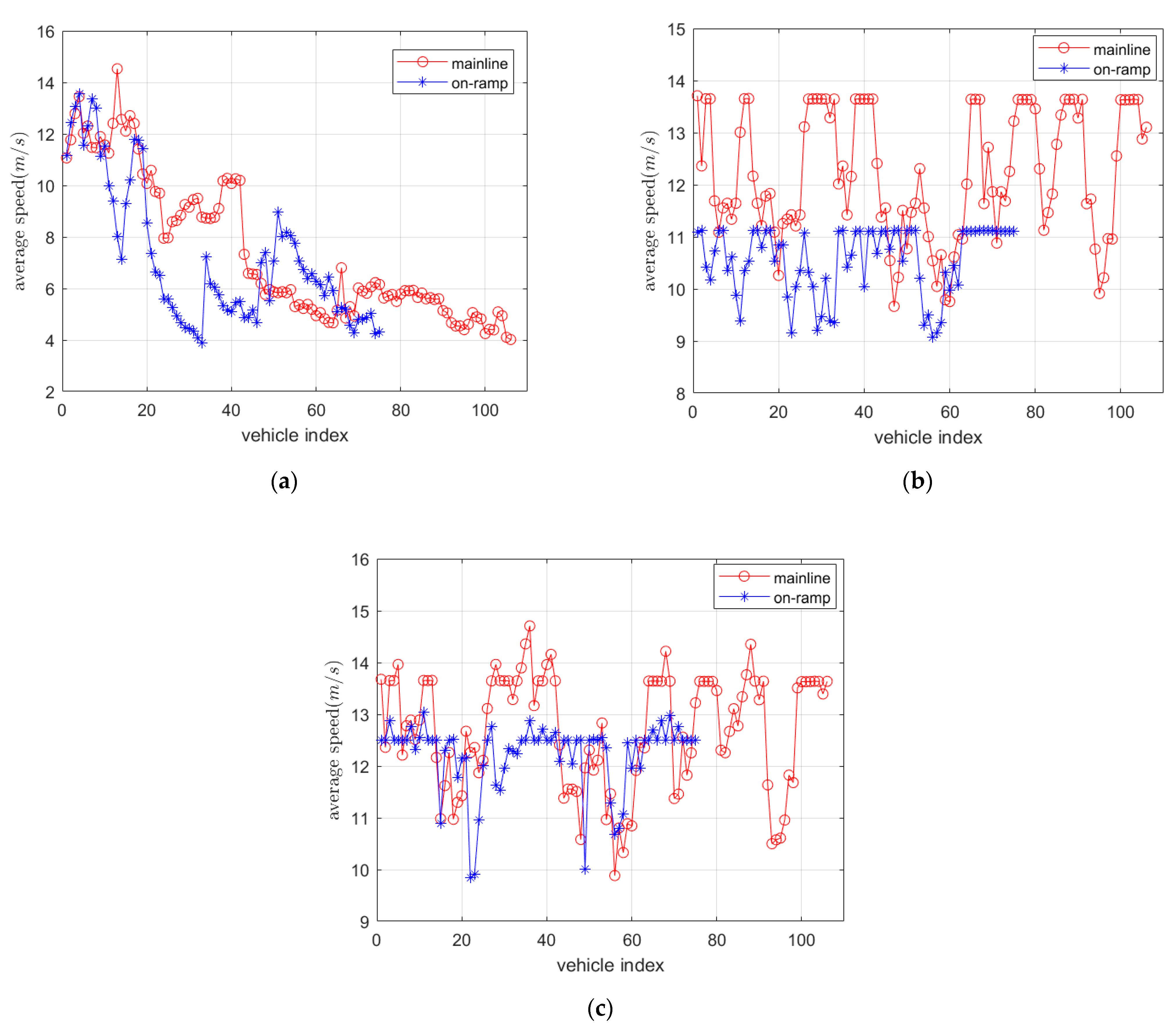
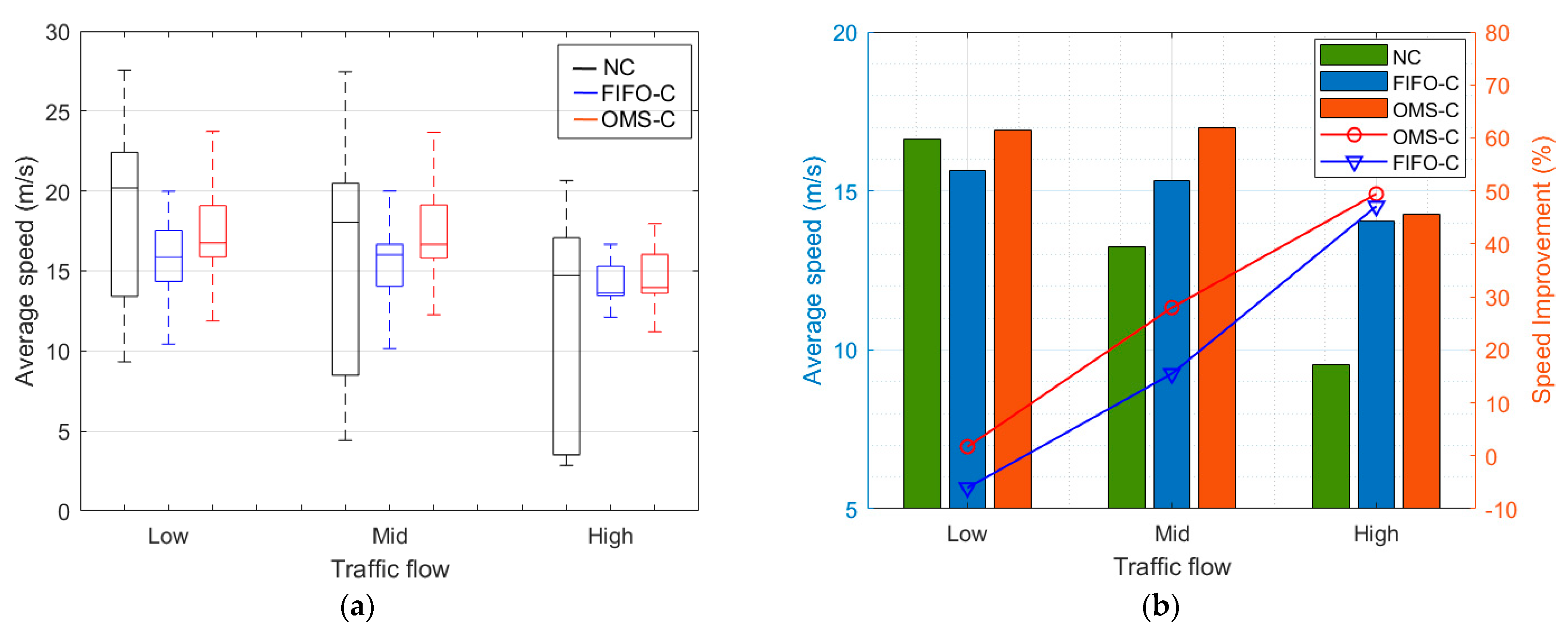
5.2. Average Speed
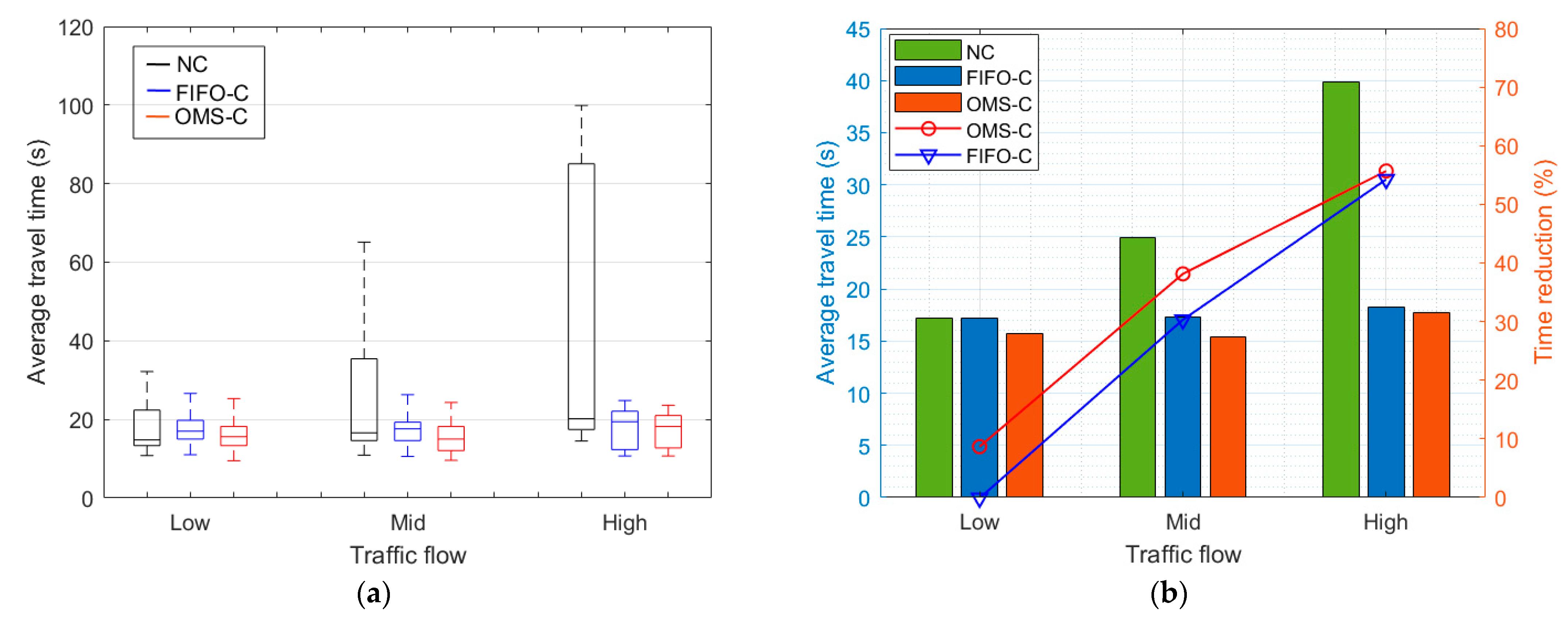
5.3. Travel Time
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M.; Messmer, A. Optimal motorway traffic flow control involving variable speed limits and ramp metering. Transp. Sci. 2010, 44, 238–253. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Kosmatopoulos, E.; Papamichail, I. Effects of variable speed limits on motorway traffic flow. Transp. Res. Rec. 2008, 2047, 37–48. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Hadj-Salem, H.; Blosseville, J.-M. ALINEA: A local feedback control law for on-ramp metering. Transp. Res. Rec. 1991, 1320, 58–67. [Google Scholar]
- Papageorgiou, M.; Kotsialos, A. Freeway ramp metering: An overview. IEEE Trans. Intell. Transp. Syst. 2002, 3, 271–281. [Google Scholar] [CrossRef]
- Stephanedes, Y.J. Implementation of on-line zone control strategies for optimal ramp metering in the Minneapolis Ring Road. In Proceedings of the Seventh International Conference on Road Traffic Monitoring and Control, London, UK, 26–28 April 1994; pp. 181–184. [Google Scholar]
- Papamichail, I.; Papageorgiou, M.; Vong, V.; Gaffney, J. Heuristic ramp-metering coordination strategy implemented at monash freeway, australia. Transp. Res. Rec. 2010, 2178, 10–20. [Google Scholar] [CrossRef]
- Liu, H.X.; Wu, X.; Michalopoulos, P.G. Improving queue size estimation for Minnesota’s stratified zone metering strategy. Transp. Res. Rec. 2007, 2012, 38–46. [Google Scholar] [CrossRef]
- Paesani, G.F. System wide adaptive ramp metering in southern California. In Proceedings of the ITS America 7th Annual Meeting and Exposition: Merging the Transportation and Communications Revolutions Intelligent Transportation Society of America (ITS America), Washington, DC, USA, 17 November 1997. [Google Scholar]
- Xie, Y.; Zhang, H.; Gartner, N.H.; Arsava, T. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment. J. Intell. Transp. Syst. 2017, 21, 136–147. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1066–1077. [Google Scholar] [CrossRef]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- Raravi, G.; Shingde, V.; Ramamritham, K.; Bharadia, J. Merge algorithms for intelligent vehicles. In Next Generation Design and Verification Methodologies for Distributed Embedded Control Systems, Proceedings of the GM R&D Workshop, Bangalore, India, January 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 51–65. [Google Scholar]
- Awal, T.; Kulik, L.; Ramamohanrao, K. Optimal traffic merging strategy for communication-and sensor-enabled vehicles. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), Hague, The Netherlands, 6–9 October 2013; pp. 1468–1474. [Google Scholar]
- Rios-Torres, J.; Malikopoulos, A.A. Automated and cooperative vehicle merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 780–789. [Google Scholar] [CrossRef]
- Uno, A.; Sakaguchi, T.; Tsugawa, S. A merging control algorithm based on inter-vehicle communication. In Proceedings of the 199 IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems (Cat. No. 99TH8383), Tokyo, Japan, 5–8 October 1999; pp. 783–787. [Google Scholar]
- Lu, X.-Y.; Hedrick, J.K. Longitudinal control algorithm for automated vehicle merging. Int. J. Control. 2003, 76, 193–202. [Google Scholar] [CrossRef]
- Ntousakis, I.A.; Porfyri, K.; Nikolos, I.K.; Papageorgiou, M. Assessing the impact of a cooperative merging system on highway traffic using a microscopic flow simulator. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014; p. V012T015A024. [Google Scholar]
- Dao, T.-S.; Clark, C.M.; Huissoon, J.P. Distributed platoon assignment and lane selection for traffic flow optimization. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhove, The Netherlands, 4–6 June 2008; pp. 739–744. [Google Scholar]
- Ntousakis, I.A.; Nikolos, I.K.; Papageorgiou, M. Optimal vehicle trajectory planning in the context of cooperative merging on highways. Transp. Res. Part C Emerg. Technol. 2016, 71, 464–488. [Google Scholar] [CrossRef]
- Zhou, Y.; Cholette, M.E.; Bhaskar, A.; Chung, E. Optimal vehicle trajectory planning with control constraints and recursive implementation for automated on-ramp merging. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3409–3420. [Google Scholar] [CrossRef]
- Schmidt, G.K.; Posch, B. A two-layer control scheme for merging of automated vehicles. In Proceedings of the 22nd IEEE Conference on Decision and Control, San Antonio, TX, USA, 14–16 December 1983; pp. 495–500. [Google Scholar]
- Ran, B.; Leight, S.; Chang, B. A microscopic simulation model for merging control on a dedicated-lane automated highway system. Transp. Res. Part. C Emerg. Technol. 1999, 7, 369–388. [Google Scholar] [CrossRef]
- Jing, S.; Hui, F.; Zhao, X.; Rios-Torres, J.; Khattak, A.J. Cooperative game approach to optimal merging sequence and on-ramp merging control of connected and automated vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4234–4244. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Li, L.; Li, W. Cooperative driving at unsignalized intersections using tree search. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4563–4571. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Mukai, M.; Murata, J.; Kawabe, T. Model predictive control of vehicles on urban roads for improved fuel economy. IEEE Trans. Control Syst. Technol. 2012, 21, 831–841. [Google Scholar] [CrossRef]
- Malikopoulos, A.A.; Cassandras, C.G.; Zhang, Y.J. A decentralized energy-optimal control framework for connected automated vehicles at signal-free intersections. Automatica 2018, 93, 244–256. [Google Scholar] [CrossRef]
- Punzo, V.; Borzacchiello, M.T.; Ciuffo, B. On the assessment of vehicle trajectory data accuracy and application to the Next Generation SIMulation (NGSIM) program data. Transp. Res. Part. C Emerg. Technol. 2011, 19, 1243–1262. [Google Scholar] [CrossRef]
- Zhao, L.; Malikopoulos, A.; Rios-Torres, J. Optimal control of connected and automated vehicles at roundabouts. In Proceedings of the 2018 TRB Annual Meeting, Washington, DC, USA, 1 July–1 November 2018; AMOak Ridge National Lab. (ORNL): Oak Ridge, TN, USA, 2018. [Google Scholar]
- Pueboobpaphan, R.; Liu, F.; van Arem, B. The impacts of a communication based merging assistant on traffic flows of manual and equipped vehicles at an on-ramp using traffic flow simulation. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 1468–1473. [Google Scholar]
- Dong, C.; Dolan, J.M.; Litkouhi, B. Intention estimation for ramp merging control in autonomous driving. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1584–1589. [Google Scholar]
- Haule, H.J.; Ali, M.S.; Alluri, P.; Sando, T. Evaluating the effect of ramp metering on freeway safety using real-time traffic data. Accid. Anal. Prev. 2021, 157, 106–181. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Zhang, S.; Zheng, P.; Guo, J.; Zhang, L.; Hu, S.; Cheng, S.; Wei, H. Freeway traffic control in presence of capacity drop. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1497–1516. [Google Scholar] [CrossRef]
- Park, H.; Bhamidipati, C.S.; Smith, B.L. Development and evaluation of enhanced intellidrive-enabled lane changing advisory algorithm to address freeway merge conflict. Transp. Res. Rec. 2011, 2243, 146–157. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Wang, Y.; Zhang, Z.; Wen, Y.; Zhong, L.; Zheng, P. A Cooperative Merging Control Method for Freeway Ramps in Connected and Autonomous Driving. Sustainability 2022, 14, 11120. https://doi.org/10.3390/su141811120
Wu J, Wang Y, Zhang Z, Wen Y, Zhong L, Zheng P. A Cooperative Merging Control Method for Freeway Ramps in Connected and Autonomous Driving. Sustainability. 2022; 14(18):11120. https://doi.org/10.3390/su141811120
Chicago/Turabian StyleWu, Jiaxin, Yibing Wang, Zhao Zhang, Yiqing Wen, Liangxia Zhong, and Pengjun Zheng. 2022. "A Cooperative Merging Control Method for Freeway Ramps in Connected and Autonomous Driving" Sustainability 14, no. 18: 11120. https://doi.org/10.3390/su141811120
APA StyleWu, J., Wang, Y., Zhang, Z., Wen, Y., Zhong, L., & Zheng, P. (2022). A Cooperative Merging Control Method for Freeway Ramps in Connected and Autonomous Driving. Sustainability, 14(18), 11120. https://doi.org/10.3390/su141811120