
Strategy Design and Performance Analysis of an Electromechanical Flywheel Hybrid Scheme for Electric Vehicles


Abstract
:1. Introduction
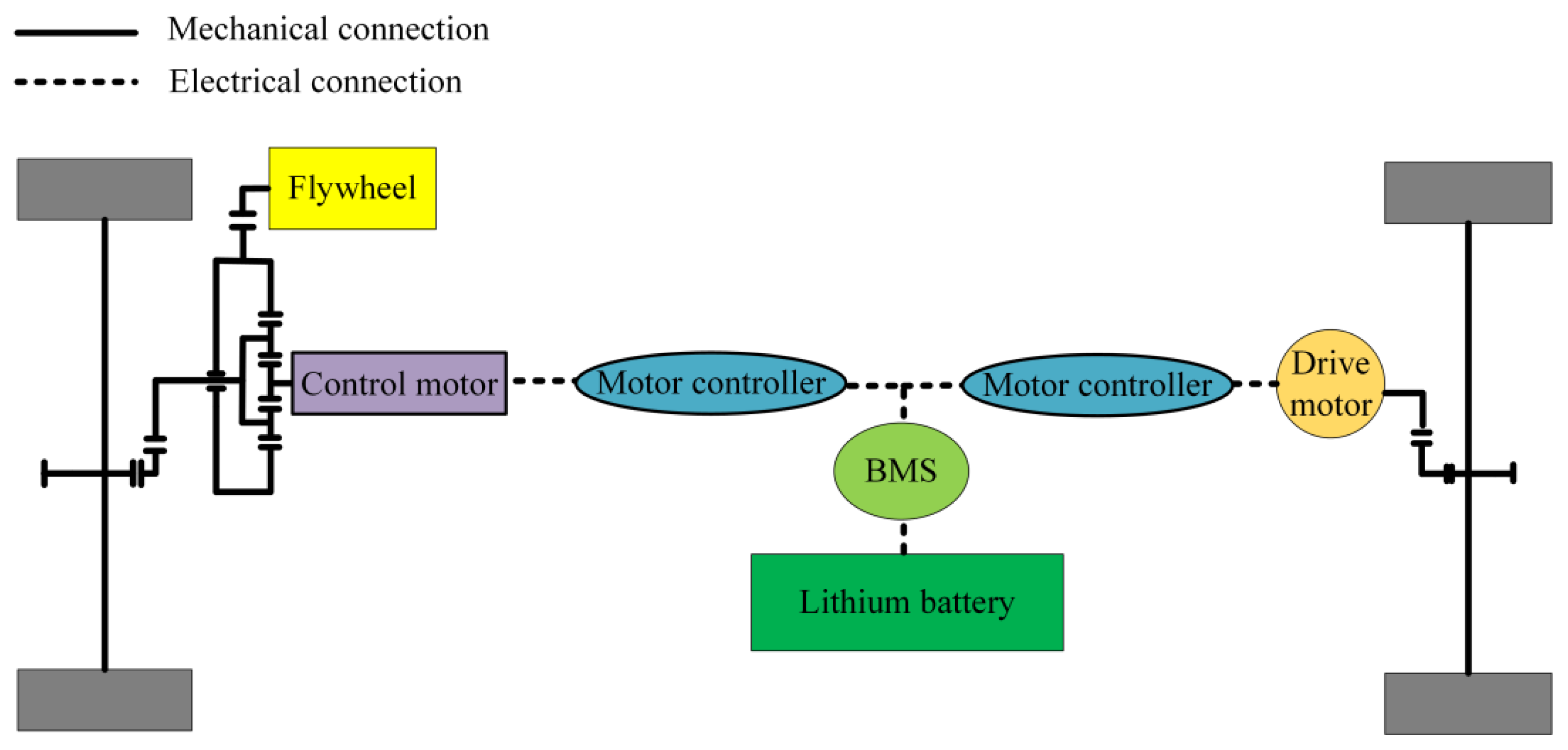
2. Topological Scheme and Working Principle of Electromechanical Flywheel Hybrid Systems
2.1. Topological Scheme of Electromechanical Flywheel Hybrid Systems
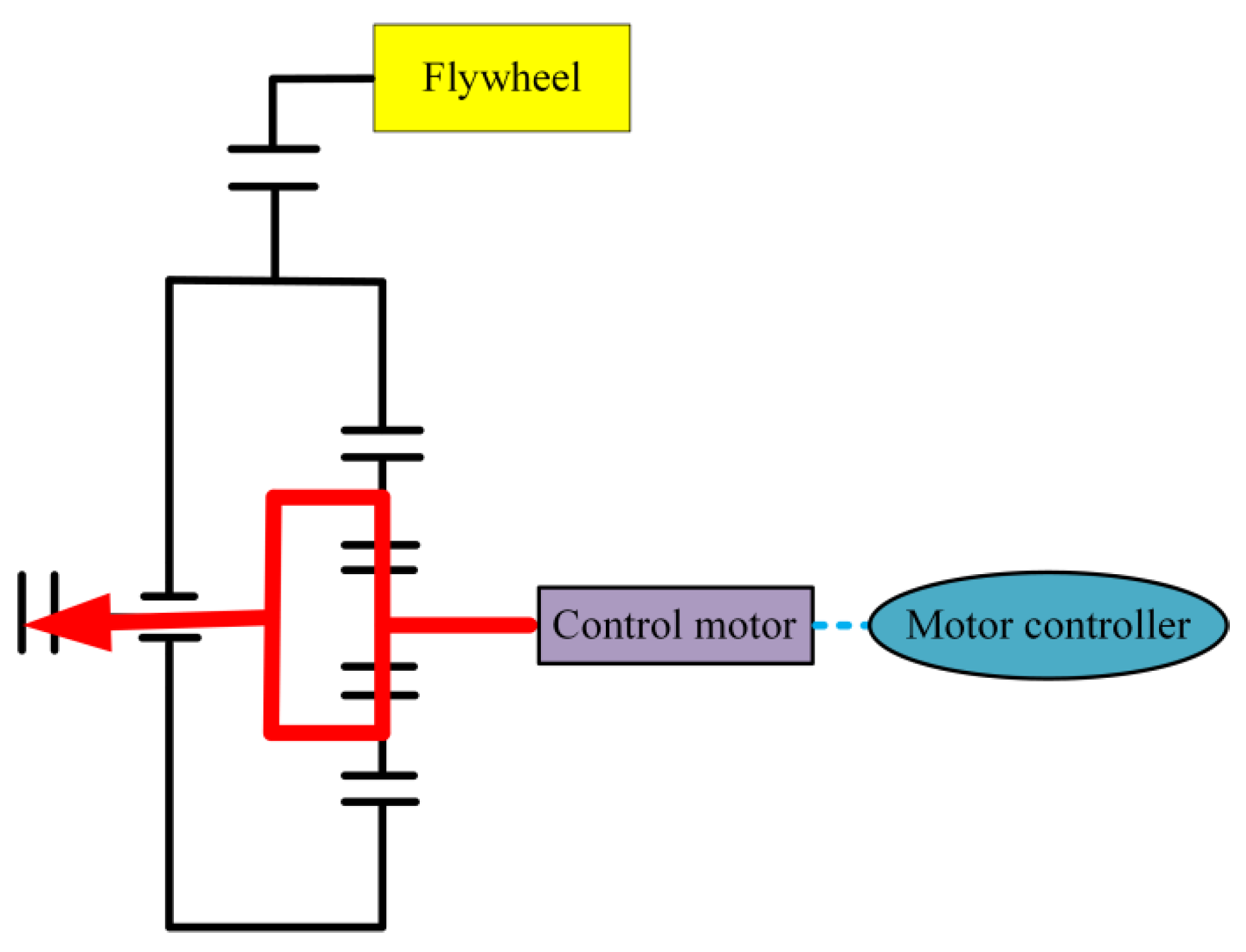
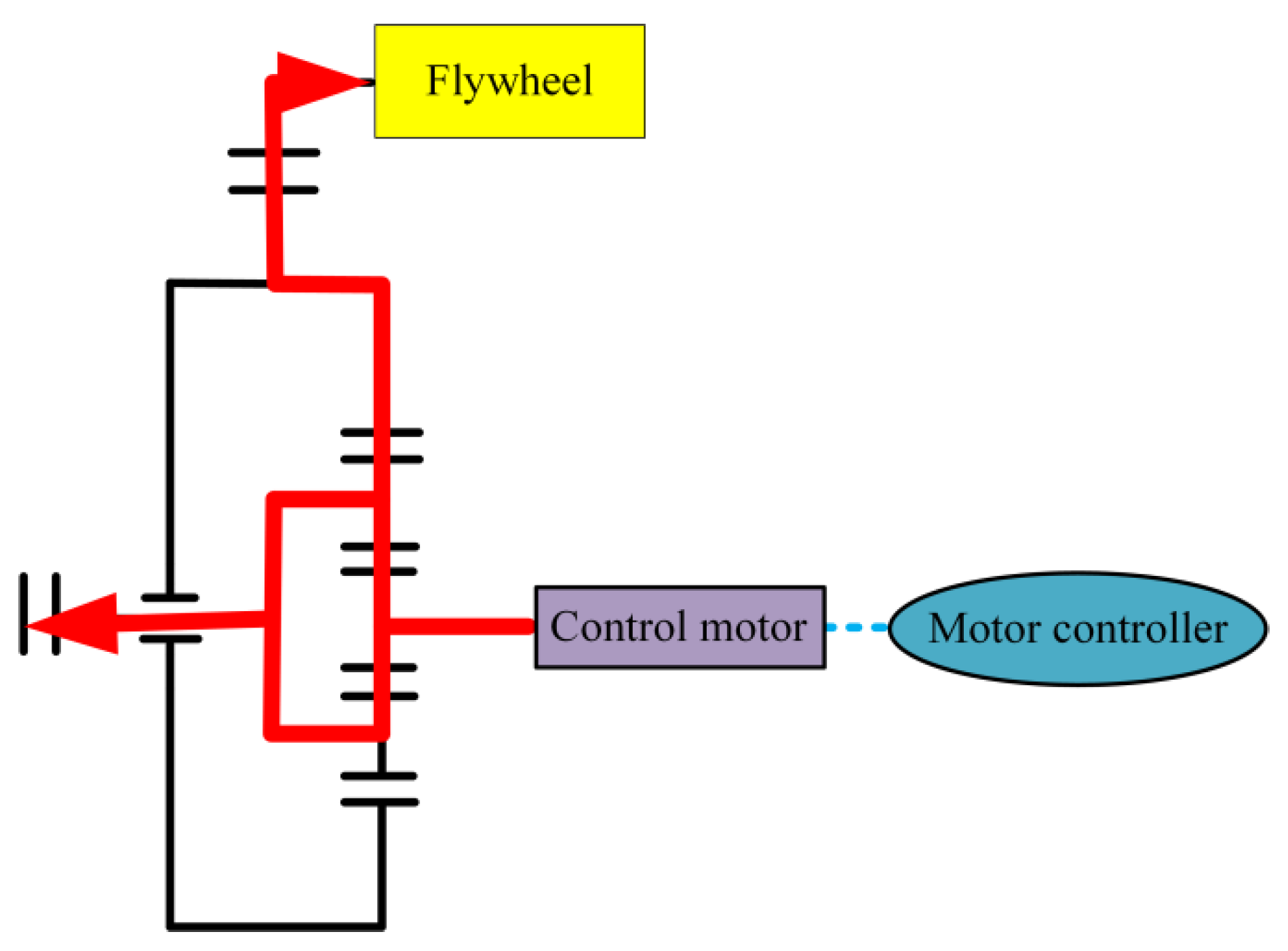
2.2. Design of Working Mode of Electromechanical Flywheel Hybrid Systems
2.2.1. Initial Acceleration Stage
2.2.2. Constant Speed Driving Stage
2.2.3. Braking Deceleration Stage
2.2.4. Re-Acceleration Stage
3. Design of Energy Management Strategies for Driving Mode
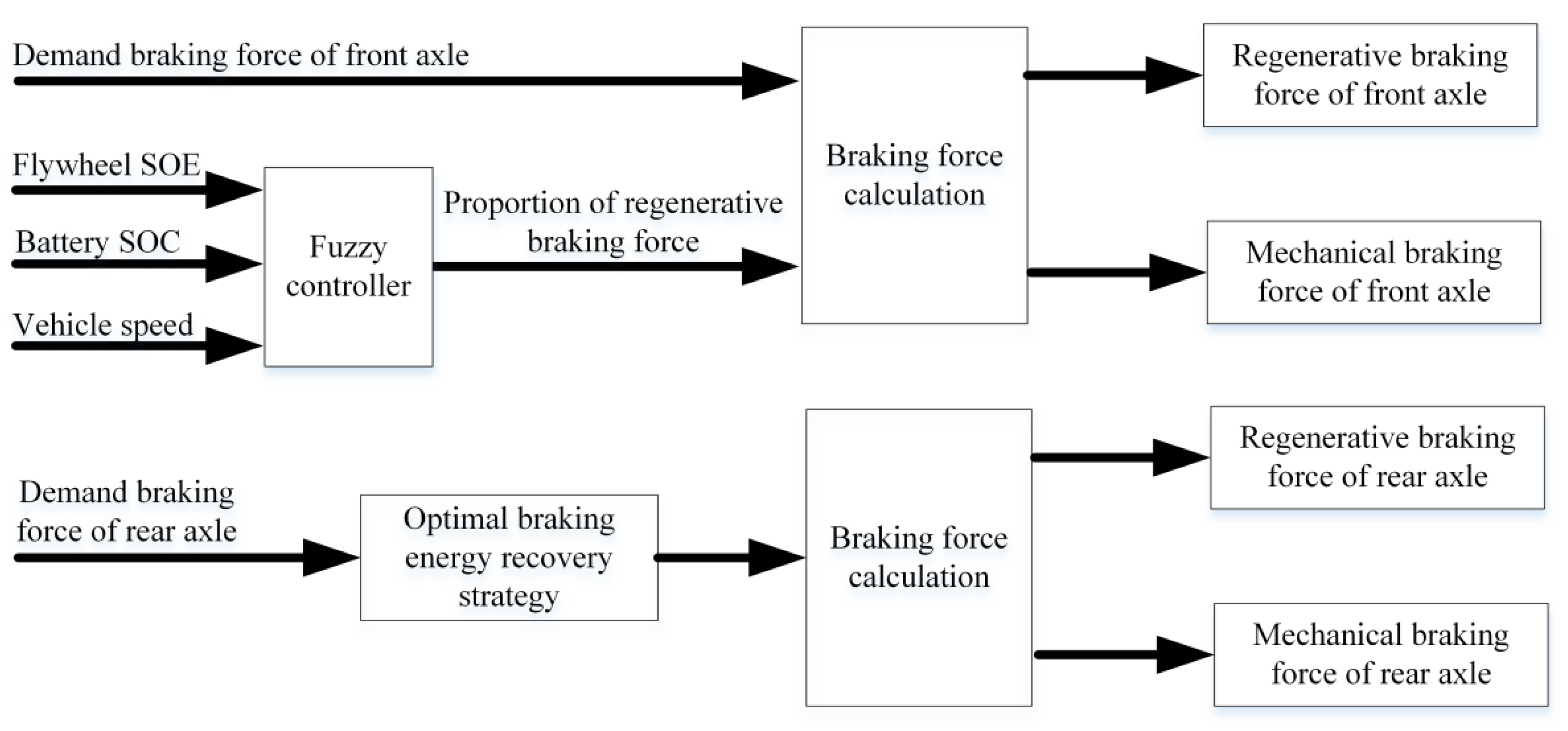
4. Design of Energy Management Strategies in Braking Mode
4.1. Design of a Braking Force Distribution Strategy for Front and Rear Axles
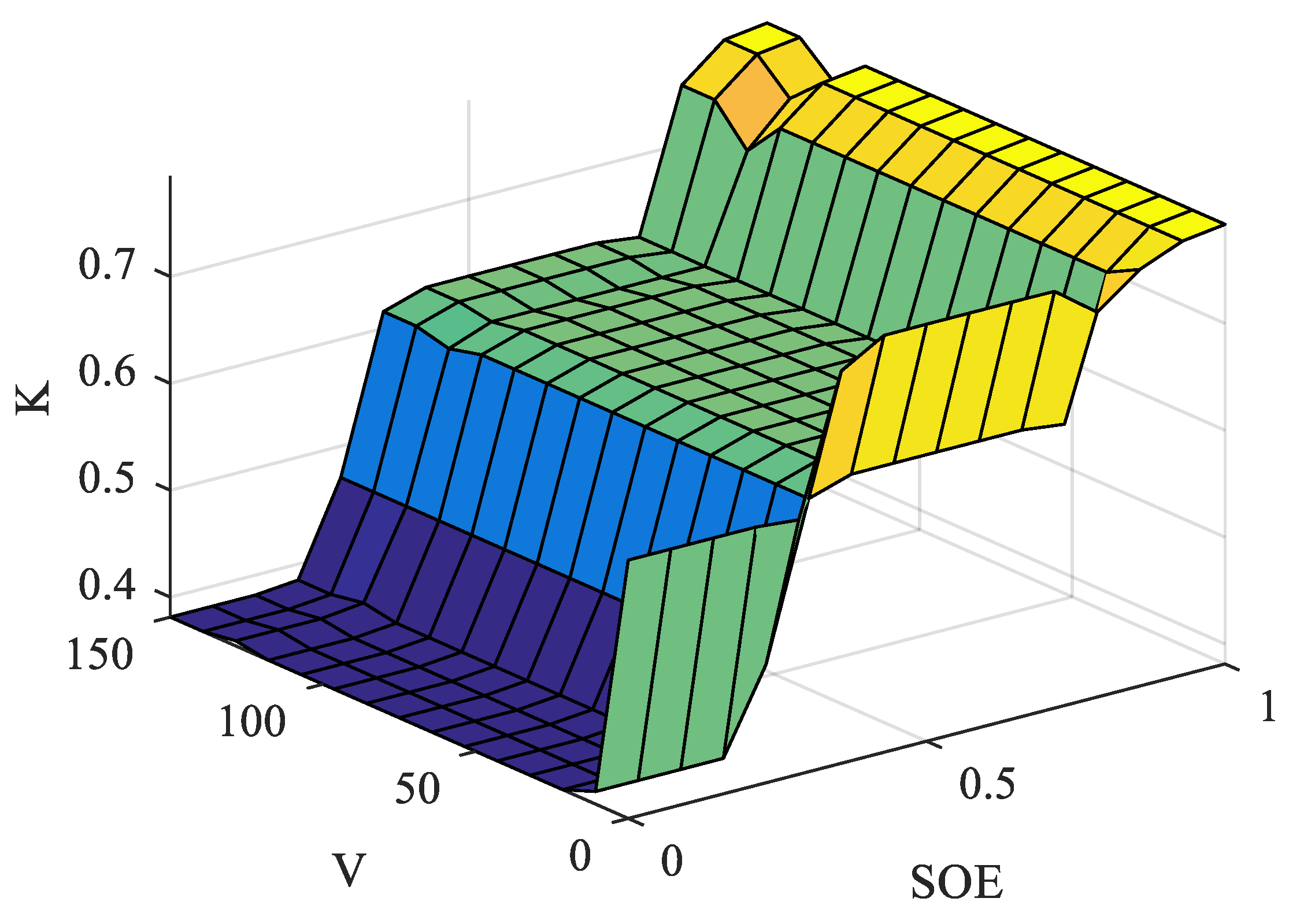
4.2. Design of Fuzzy Controller for Regenerative Braking Torque Distribution
5. Hardware in the Loop Test and Performance Analysis
5.1. Test Platform Design
5.2. Analysis of Speed and Torque Laws in Electromechanical Flywheel Hybrid Systems
5.3. Economic Analysis of Electromechanical Flywheel Hybrid Electric Vehicles
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, J.; Chen, X.; Qiu, R.; Hou, S. Electric vehicle industry sustainable development with a stakeholder engagement system. Technol. Soc. 2021, 67, 101771. [Google Scholar] [CrossRef]
- Xia, X.N.; Li, P.W. A review of the life cycle assessment of electric vehicles: Considering the influence of batteries. Sci. Total Environ. 2022, 814, 152870. [Google Scholar] [CrossRef] [PubMed]
- Sendek-Matysiak, E. Assessment of BEVs Use in Urban Environment. Adv. Intell. Syst. Comput. 2020, 1091, 52–63. [Google Scholar]
- Lebrouhi, B.; Khattari, Y.; Lamrani, B.; Maaroufi, M.; Zeraouli, Y.; Kousksou, T. Key challenges for a large-scale development of battery electric vehicles: A comprehensive review. J. Energy Storage 2021, 44, 103273. [Google Scholar] [CrossRef]
- Ziegler, D.; Abdelkafi, N. Business models for electric vehicles: Literature review and key insights. J. Clean. Prod. 2022, 330, 129803. [Google Scholar] [CrossRef]
- Yadlapalli, R.T.; Kotapati, A.; Kandipati, R.; Koritala, C.S. A review on energy efficient technologies for electric vehicle applications. J. Energy Storage 2022, 50, 104212. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Ma, S.C.; Xu, J.H.; Fan, Y. Characteristics and key trends of global electric vehicle technology development: A multi-method patent analysis. J. Clean. Prod. 2022, 338, 130502. [Google Scholar] [CrossRef]
- Sun, B.B.; Gao, S.; Ma, C. System Power Loss Optimization of Electric Vehicle Driven by Front and Rear Induction Motors. Int. J. Automot. Technol. 2018, 19, 121–134. [Google Scholar] [CrossRef]
- Li, Z.; Khajepour, A.; Song, J. A comprehensive review of the key technologies for pure electric vehicles. Energy 2019, 182, 824–839. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Comparative analysis of two hybrid energy storage systems used in a two front wheel driven electric vehicle during extreme start-up and regenerative braking operations. Energy Convers. Manag. 2017, 144, 69–87. [Google Scholar] [CrossRef]
- Gao, S.; Wu, Z.; Sun, B. Parameters design and economy study of an electric vehicle with powertrain systems in front and rear axle. Int. J. Eng. Trans. A Basics 2016, 29, 454–463. [Google Scholar]
- Arani, A.K.; Karami, H.; Gharehpetian, G.; Hejazi, M. Review of flywheel energy storage systems structures and applications in power systems and microgrids. Renew. Sustain. Energy Rev. 2017, 69, 9–18. [Google Scholar] [CrossRef]
- Choudhury, S. Flywheel energy storage systems: A critical review on technologies, applications, and future prospects. Int. Trans. Electr. Energy Syst. 2021, 31, e13024. [Google Scholar] [CrossRef]
- Dhand, A.; Pullen, K. Review of Battery Electric Vehicle Propulsion Systems Incorporating Flywheel Energy Storge. Int. J. Automot. Technol. 2015, 16, 487–500. [Google Scholar] [CrossRef]
- Hansen, J.G.R.; O’Kain, D.U. An Assessment of Flywheel High Power Energy Storage Technology for Hybrid Vehicles; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2012. [Google Scholar]
- Huang, C.N.; Chen, Y.S. Design of magnetic flywheel control for performance improvement of fuel cells used in vehicles. Energy 2017, 118, 840–852. [Google Scholar] [CrossRef]
- Qiu, Y.; Jiang, S. Suppression of low-frequency vibration for rotor-bearing system of flywheel energy storage system. Mech. Syst. Signal Process. 2019, 121, 496–508. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, C.; Hong, G.; Huang, X.; Li, L. Method for evaluating the real-world driving energy consumptions of electric vehicles. Energy 2017, 141, 1955–1968. [Google Scholar] [CrossRef]
- Sun, B.; Wang, Y.; Li, W.; Zhang, T.; Li, B.; Ge, W. Driving Control Strategy For Hybrid Energy System Based On Fuel Cell, Lithium Battery and Electric Flywheel Battery. Chinese GWP202112496, 14 September 2021. [Google Scholar]
- Wang, Y.; Sun, Z.; Chen, Z. Rule-based energy management strategy of a lithium-ion battery, supercapacitor and PEM fuel cell system. Energy Procedia 2019, 158, 2555–2560. [Google Scholar] [CrossRef]
- Rimpas, D.; Kaminaris, S.D.; Aldarraji, I.; Piromalis, D.; Vokas, G.; Papageorgas, P.G.; Tsaramirsis, G. Energy management and storage systems on electric vehicles: A comprehensive review. Mater. Today Proc. 2022, 61, 813–819. [Google Scholar] [CrossRef]
- Ganesh, A.H.; Xu, B. A review of reinforcement learning based energy management systems for electrified powertrains: Progress, challenge, and potential solution. Renew. Sustain. Energy Rev. 2022, 154, 111833. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Zhang, Y.; Wu, Y.; Chen, Z.; Ye, M. Rule learning based energy management strategy of fuel cell hybrid vehicles considering multi-objective optimization. Energy 2020, 207, 118212. [Google Scholar] [CrossRef]
- Chen, L.; Zhu, F.; Zhang, M.; Huo, Y.; Yin, C.; Peng, H. Design and analysis of an electrical variable transmission for a series-parallel hybrid electric vehicle. IEEE Trans. Veh. Technol. 2011, 60, 2354–2363. [Google Scholar] [CrossRef]
- Mashadi, B.; Emadi, S.A.M. Dual-mode power-split transmission for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2010, 59, 3223–3232. [Google Scholar] [CrossRef]
- Madhusudhanan, A.K.; Na, X.; Cebon, D. A Computationally Efficient Framework for Modelling Energy Consumption of ICE and Electric Vehicles. Energies 2021, 14, 2031. [Google Scholar] [CrossRef]
- Wang, T.; Li, Q.; Wang, X.; Qiu, Y.; Liu, M.; Meng, X.; Li, J.; Chen, W. An optimized energy management strategy for fuel cell hybrid power system based on maximum efficiency range identification. J. Power Sources 2020, 445, 227333. [Google Scholar] [CrossRef]
- Wang, C.; Liu, R.; Tang, A. Energy management strategy of hybrid energy storage system for electric vehicles based on genetic algorithm optimization and temperature effect. J. Energy Storage 2022, 51, 104314. [Google Scholar] [CrossRef]
- Kim, N.; Cha, S.W.; Peng, H. Optimal equivalent fuel consumption for hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2012, 20, 817–825. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Fuzzy Control Rules |
|---|---|
| 1 | If (SOE is L) and (V is L) then (K is MB) |
| 2 | If (SOE is L) and (V is M) then (K is ML) |
| 3 | If (SOE is L) and (V is B) then (K is ML) |
| 4 | If (SOE is M) and (V is L) then (K is B) |
| 5 | If (SOE is M) and (V is M) then (K is MB) |
| 6 | If (SOE is M) and (V is B) then (K is MB) |
| 7 | If (SOE is B) and (V is L) then (K is B) |
| 8 | If (SOE is B) and (V is M) then (K is B) |
| 9 | If (SOE is B) and (V is B) then (K is B) |
| Serial Number | Fuzzy Control Rules |
|---|---|
| 1 | If (FWSOE is L) and (Z is L) then (Kf is B) |
| 2 | If (FWSOE is L) and (Z is M) then (Kf is MB) |
| 3 | If (FWSOE is L) and (Z is B) then (Kf is MB) |
| 4 | If (FWSOE is M) and (Z is L) then (Kf is MB) |
| 5 | If (FWSOE is M) and (Z is M) then (Kf is MB) |
| 6 | If (FWSOE is M) and (Z is B) then (Kf is MB) |
| 7 | If (FWSOE is B) and (Z is L) then (Kf is L) |
| 8 | If (FWSOE is B) and (Z is M) then (Kf is ML) |
| 9 | If (FWSOE is B) and (Z is B) then (Kf is B) |
| Serial Number | Fuzzy Control Rules |
|---|---|
| 1 | If (SOC is L) and (SOE is L) and (V is L) then (Kr is B) |
| 2 | If (SOC is L) and (SOE is L) and (V is M) then (Kr is B) |
| 3 | If (SOC is L) and (SOE is L) and (V is B) then (Kr is B) |
| 4 | If (SOC is L) and (SOE is ML) and (V is L) then (Kr is B) |
| 5 | If (SOC is L) and (SOE is ML) and (V is M) then (Kr is B) |
| 6 | If (SOC is L) and (SOE is ML) and (V is B) then (Kr is MB) |
| 7 | If (SOC is L) and (SOE is MB) and (V is L) then (Kr is B) |
| 8 | If (SOC is L) and (SOE is MB) and (V is M) then (Kr is MB) |
| 9 | If (SOC is L) and (SOE is MB) and (V is B) then (Kr is M) |
| 10 | If (SOC is L) and (SOE is B) and (V is L) then (Kr is M) |
| 11 | If (SOC is L) and (SOE is B) and (V is M) then (Kr is ML) |
| 12 | If (SOC is L) and (SOE is B) and (V is M) then (Kr is ML) |
| 13 | If (SOC is M) and (SOE is L) and (V is L) then (Kr is B) |
| 14 | If (SOC is M) and (SOE is L) and (V is M) then (Kr is B) |
| 15 | If (SOC is M) and (SOE is L) and (V is B) then (Kr is B) |
| 16 | If (SOC is M) and (SOE is ML) and (V is L) then (Kr is B) |
| 17 | If (SOC is M) and (SOE is ML) and (V is M) then (Kr is MB) |
| 18 | If (SOC is M) and (SOE is ML) and (V is B) then (Kr is MB) |
| 19 | If (SOC is M) and (SOE is MB) and (V is L) then (Kr is MB) |
| 20 | If (SOC is M) and (SOE is MB) and (V is M) then (Kr is M) |
| 21 | If (SOC is M) and (SOE is MB) and (V is B) then (Kr is ML) |
| 22 | If (SOC is M) and (SOE is B) and (V is L) then (Kr is ML) |
| 23 | If (SOC is M) and (SOE is B) and (V is M) then (Kr is ML) |
| 24 | If (SOC is M) and (SOE is B) and (V is B) then (Kr is L) |
| 25 | If (SOC is B) and (SOE is L) and (V is L) then (Kr is B) |
| 26 | If (SOC is B) and (SOE is L) and (V is M) then (Kr is B) |
| 27 | If (SOC is B) and (SOE is L) and (V is B) then (Kr is MB) |
| 28 | If (SOC is B) and (SOE is ML) and (V is L) then (Kr is MB) |
| 29 | If (SOC is B) and (SOE is ML) and (V is M) then (Kr is MB) |
| 30 | If (SOC is B) and (SOE is ML) and (V is B) then (Kr is M) |
| 31 | If (SOC is B) and (SOE is MB) and (V is L) then (Kr is M) |
| 32 | If (SOC is B) and (SOE is MB) and (V is M) then (Kr is M) |
| 33 | If (SOC is B) and (SOE is MB) and (V is B) then (Kr is ML) |
| 34 | If (SOC is B) and (SOE is B) and (V is L) then (Kr is ML) |
| 35 | If (SOC is B) and (SOE is B) and (V is M) then (Kr is L) |
| 36 | If (SOC is B) and (SOE is B) and (V is B) then (Kr is L) |
| Parameter | Value |
|---|---|
| Complete vehicle kerb mass (Scheme 1) | 1580 kg |
| Radius of tire (both) | 300 mm |
| Rolling resistance coefficient (both) | 0.015 |
| Air resistance coefficient (both) | 0.3 |
| Windward area (both) | 2 m2 |
| Type of drive motor | Permanent magnet motor |
| Rated speed of drive motor (both) | 3000 rpm |
| Rated torque of drive motor (both) | 64 N·m |
| Rated power of drive motor (both) | 20 kW |
| Peak speed of drive motor (both) | 8000 rpm |
| Peak torque of drive motor (both) | 130 N·m |
| Peak power of drive motor (both) | 40 kW |
| Mass of flywheel (Scheme 2) | 8.8 kg |
| Height of flywheel (Scheme 2) | 100 mm |
| Inner radius of flywheel (Scheme 2) | 100 mm |
| Outer radius of flywheel (Scheme 2) | 150 mm |
| Speed range of flywheel (Scheme 2) | 0~20,000 rpm |
| Rotational inertia of flywheel (Scheme 2) | 0.08 kg·m2 |
| Type of control motor of flywheel | AC induction motor |
| Rated speed of control motor (Scheme 2) | 4000 rpm |
| Rated torque of control motor (Scheme 2) | 35 N·m |
| Rated power of control motor (Scheme 2) | 15 kW |
| Peak speed of control motor (Scheme 2) | 10,000 rpm |
| Peak torque of control motor (Scheme 2) | 95 N·m |
| Peak power of control motor (Scheme 2) | 40 kW |
| Type of battery pack | Ternary lithium battery |
| Rated voltage (both) | 320 V |
| Rated capacity (both) | 130 Ah |
| Rated power (both) | 100 kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Gu, T.; Xie, M.; Wang, P.; Gao, S.; Zhang, X. Strategy Design and Performance Analysis of an Electromechanical Flywheel Hybrid Scheme for Electric Vehicles. Sustainability 2022, 14, 11017. https://doi.org/10.3390/su141711017
Sun B, Gu T, Xie M, Wang P, Gao S, Zhang X. Strategy Design and Performance Analysis of an Electromechanical Flywheel Hybrid Scheme for Electric Vehicles. Sustainability. 2022; 14(17):11017. https://doi.org/10.3390/su141711017
Chicago/Turabian StyleSun, Binbin, Tianqi Gu, Mengxue Xie, Pengwei Wang, Song Gao, and Xi Zhang. 2022. "Strategy Design and Performance Analysis of an Electromechanical Flywheel Hybrid Scheme for Electric Vehicles" Sustainability 14, no. 17: 11017. https://doi.org/10.3390/su141711017
APA StyleSun, B., Gu, T., Xie, M., Wang, P., Gao, S., & Zhang, X. (2022). Strategy Design and Performance Analysis of an Electromechanical Flywheel Hybrid Scheme for Electric Vehicles. Sustainability, 14(17), 11017. https://doi.org/10.3390/su141711017