
Location, Location, Location: Modelling of Noise Mitigation by Urban Woodland Shows the Benefit of Targeted Tree Planting in Cities

 , ,
, ,
Abstract
:1. Introduction
- How much benefit is provided by the current configuration of urban woodland in Birmingham?
- What is the maximum benefit that could be provided by new woodland?
- Does opportunity mapping to inform the placement of new woodland perform better than an untargeted approach?
2. Materials and Methods
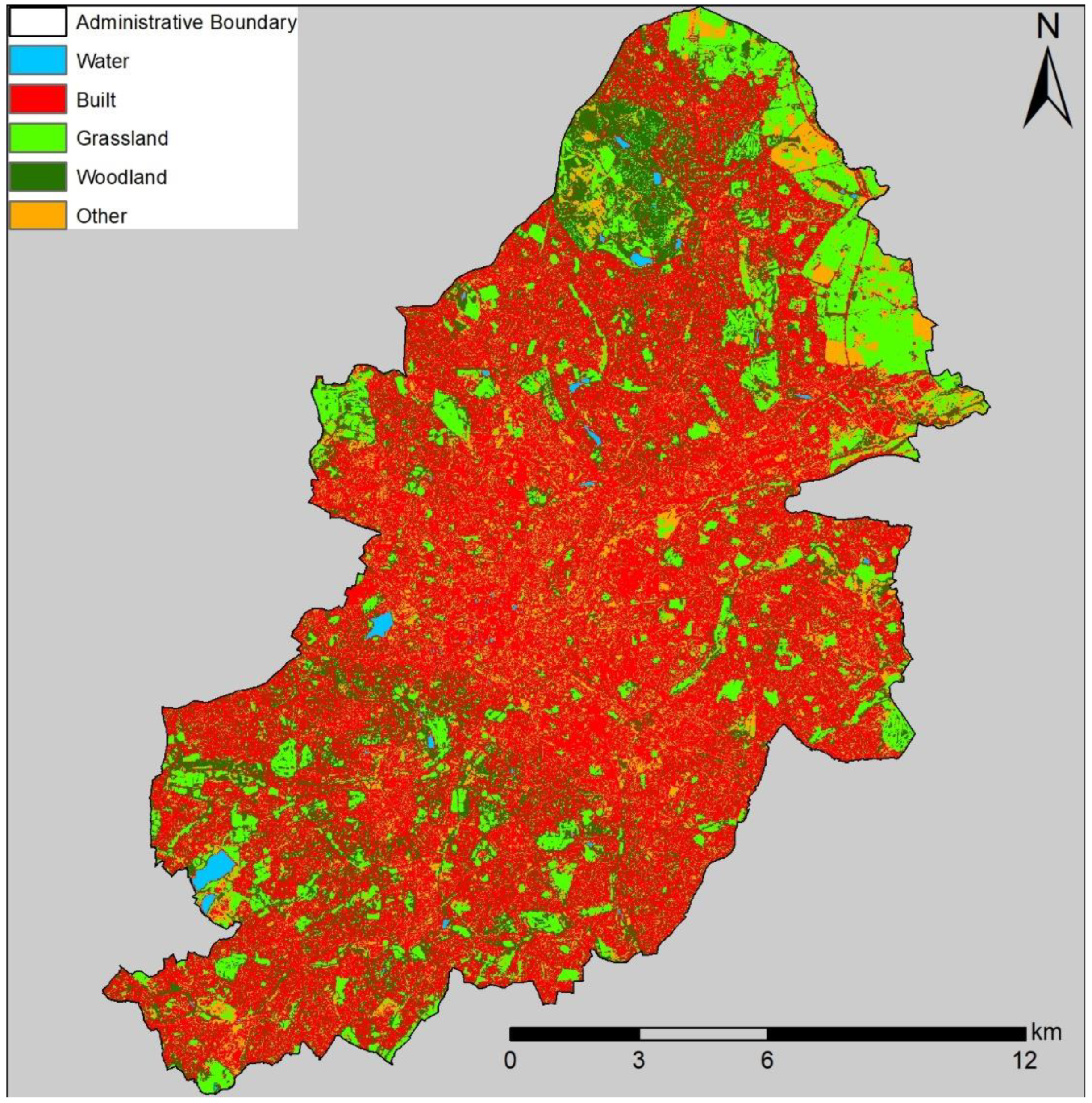
2.1. Datasets
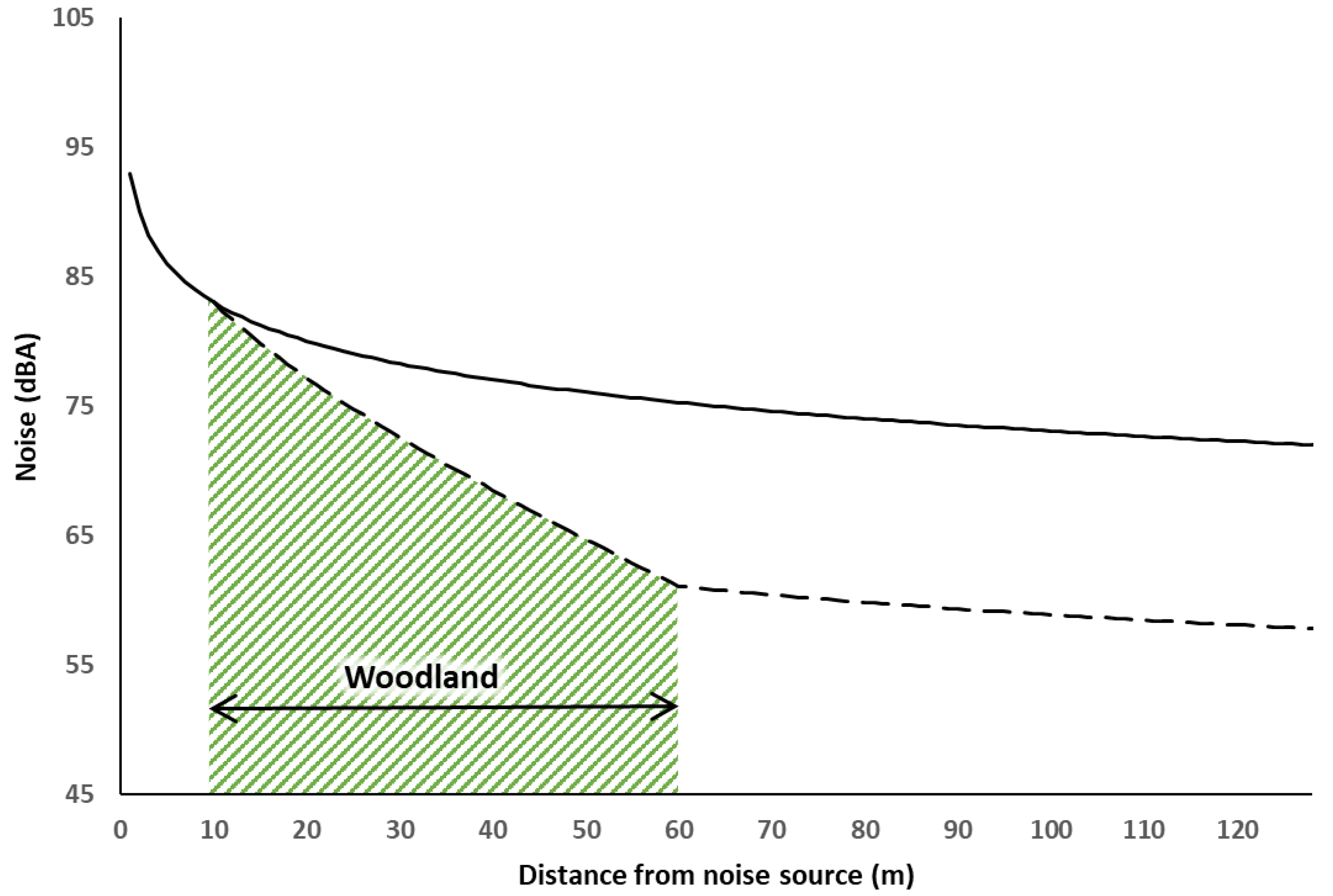
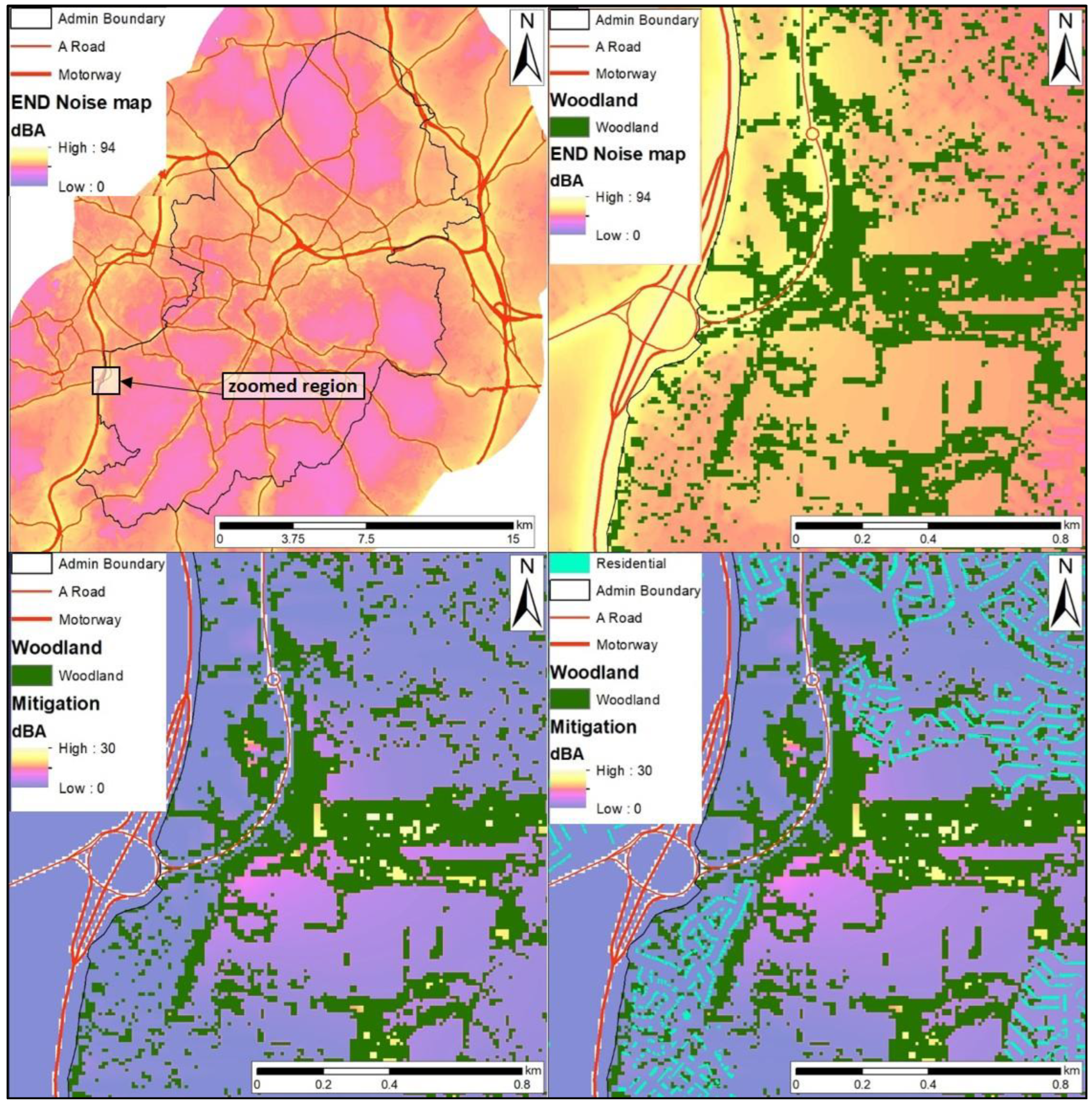
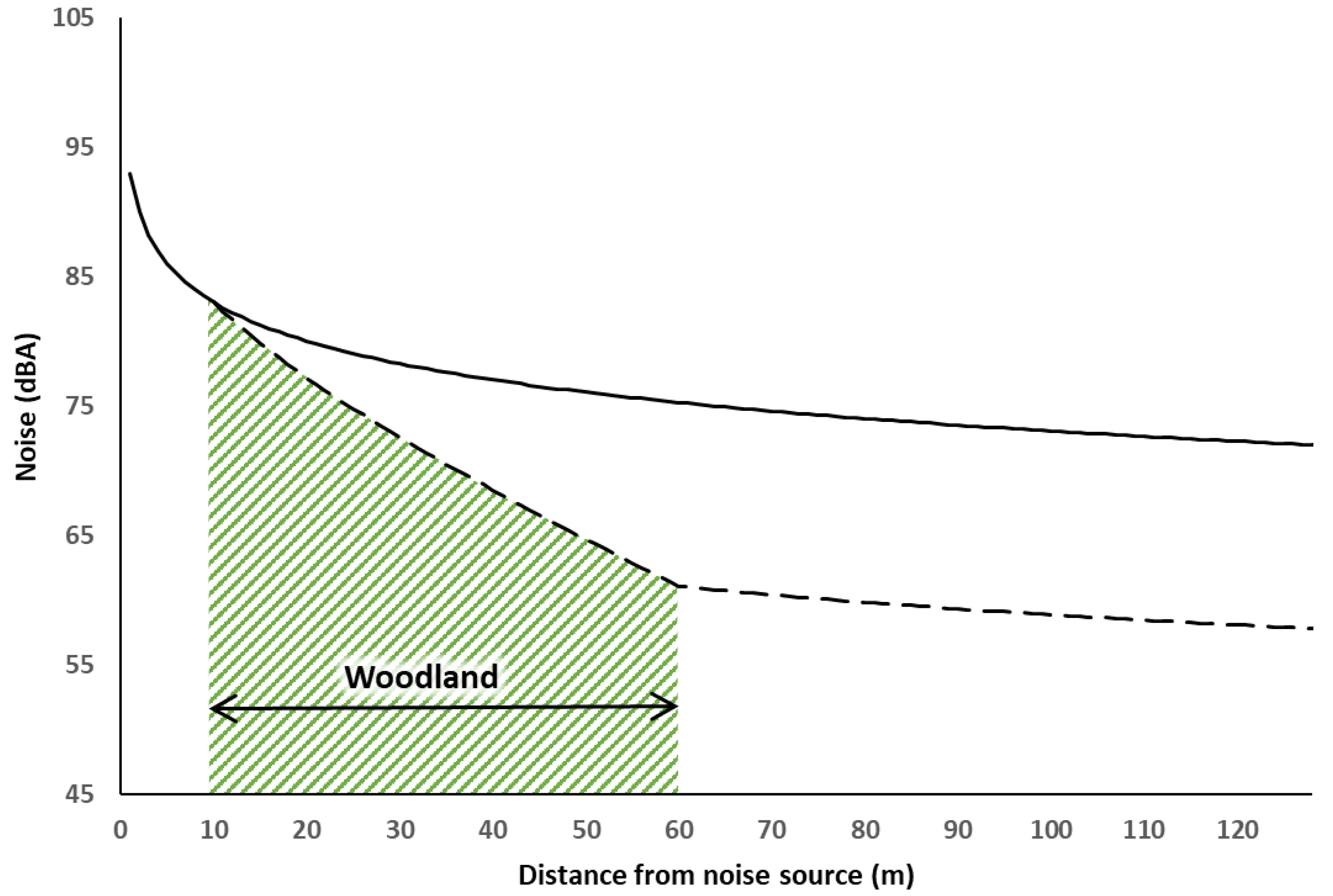
2.2. Calculating Noise Mitigation Provided by Trees
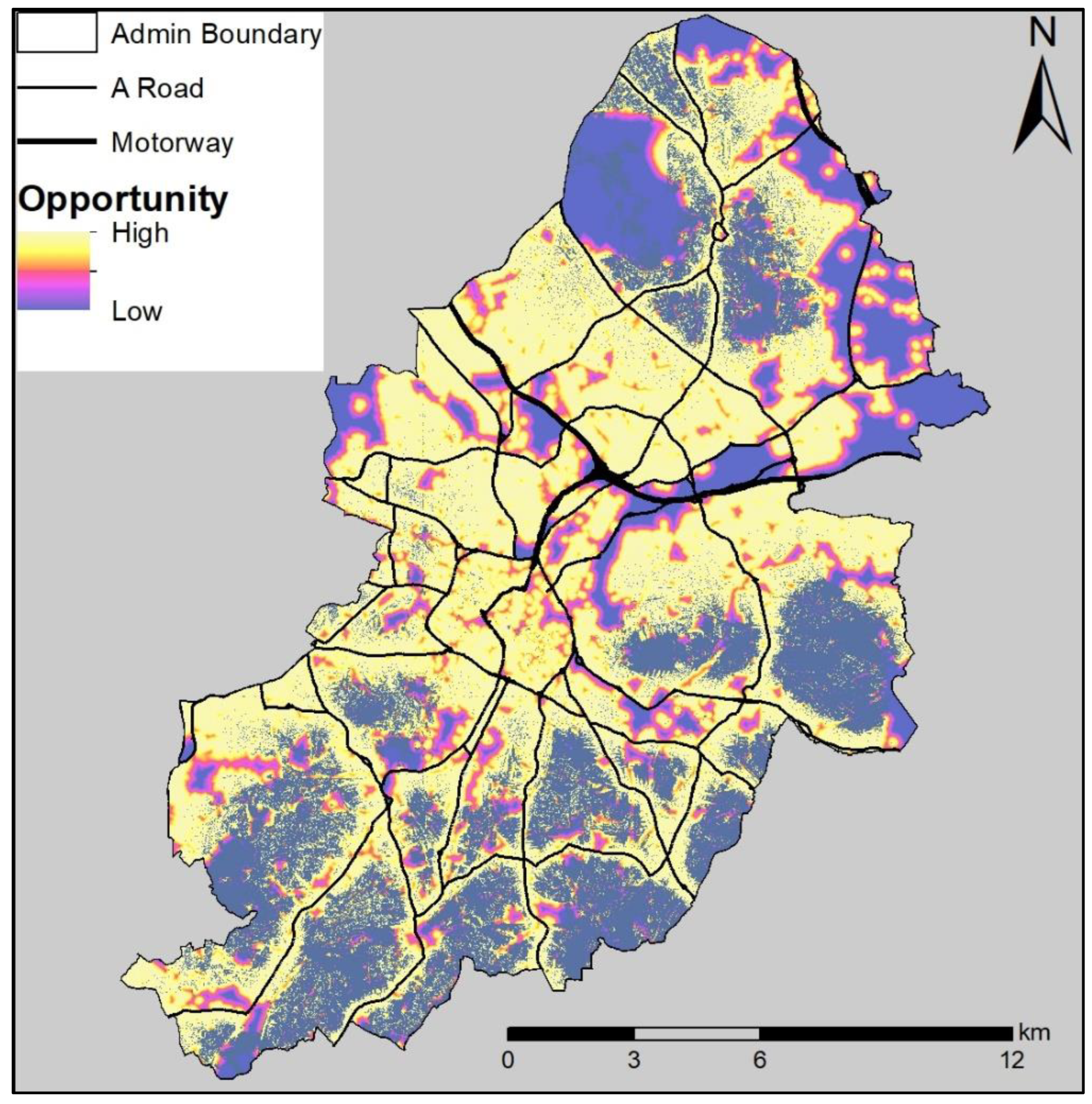
2.3. Opportunity Mapping
2.4. Scenarios
2.5. Quantifying Exposure and Economic Value of Mitigation for Scenarios
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bolund, P.; Hunhammar, S. Ecosystem services in urban areas. Ecol. Econ. 1999, 29, 293–301. [Google Scholar] [CrossRef]
- Hänninen, O.; Knol, A.B.; Jantunen, M.; Lim, T.A.; Conrad, A.; Rappolder, M.; Carrer, P.; Fanetti, A.-C.; Kim, R.; Buekers, J.; et al. Environmental burden of disease in Europe: Assessing nine risk factors in six countries. Environ. Health Perspect. 2014, 122, 439–446. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hammer, M.S.; Swinburn, T.K.; Neitzel, R.L. Environmental noise pollution in the United States: Developing an effective public health response. Environ. Health Perspect. 2014, 122, 115–119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Münzel, T.; Gori, T.; Babisch, W.; Basner, M. Cardiovascular effects of environmental noise exposure. Eur. Heart J. 2014, 35, 829–836. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Münzel, T.; Sørensen, M.; Gori, T.; Schmidt, F.P.; Rao, X.; Brook, F.R.; Rajagopalan, S.; Chen, L.C.; Brook, R.D. Environmental stressors and cardio-metabolic disease: Part II–mechanistic insights. Eur. Heart J. 2017, 38, 557–564. [Google Scholar] [CrossRef] [PubMed]
- Hammer, M.S.; Fan, Y.; Hammer, S.S.; Swinburn, T.K.; Weber, M.; Weinhold, D.; Neitzel, R.L. Applying a novel environmental health framework theory (I-ACT) to noise pollution policies in the United States, United Kingdom, and the Netherlands. J. Environ. Plan. Manag. 2018, 61, 2111–2132. [Google Scholar] [CrossRef]
- Hurtley, C. (Ed.) Night Noise Guidelines for Europe; WHO Regional Office Europe: Copenhagen, Denmark, 2009. [Google Scholar]
- van Renterghem, T. Guidelines for optimizing road traffic noise shielding by non-deep tree belts. Ecol. Eng. 2014, 69, 276–286. [Google Scholar] [CrossRef] [Green Version]
- HOSANNA. Novel Solutions for Quieter and Greener Cities; EU FP7: Bandhagen, Sweden, 2013. [Google Scholar]
- Tang, S.H.; Ong, P.P.; Woon, H.S. Monte Carlo simulation of sound propagation through leafy foliage using experimentally obtained leaf resonance parameters. J. Acoust. Soc. Am. 1986, 80, 1740–1744. [Google Scholar] [CrossRef]
- van Renterghem, T.; Botteldooren, D.; Verheyen, K. Road traffic noise shielding by vegetation belts of limited depth. J. Sound Vib. 2012, 331, 2404–2425. [Google Scholar] [CrossRef] [Green Version]
- Eigenbrod, F.; Armsworth, P.R.; Anderson, B.J.; Heinemeyer, A.; Gillings, S.; Roy, D.B.; Thomas, C.D.; Gaston, K.J. The impact of proxy-based methods on mapping the distribution of ecosystem services. J. Appl. Ecol. 2010, 47, 377–385. [Google Scholar] [CrossRef]
- Thomas, A.; Masante, D.; Jackson, B.; Cosby, B.; Emmett, B.; Jones, L. Fragmentation and thresholds in hydrological flow-based ecosystem services. Ecol. Appl. 2020, 30, e02046. [Google Scholar] [CrossRef] [PubMed]
- Villa, F.; Bagstad, K.J.; Voigt, B.; Johnson, G.W.; Portela, R.; Honzák, M.; Batker, D. A methodology for adaptable and robust ecosystem services assessment. PLoS ONE 2014, 9, e91001. [Google Scholar] [CrossRef] [PubMed]
- Andersson-Sköld, Y.; Klingberg, J.; Gunnarsson, B.; Cullinane, K.; Gustafsson, I.; Hedblom, M.; Knez, I.; Lindberg, F.; Sang, Å.O.; Pleijel, H.; et al. A framework for assessing urban greenery’s effects and valuing its ecosystem services. J. Environ. Manag. 2018, 205, 274–285. [Google Scholar] [CrossRef] [PubMed]
- Gratani, L.; Varone, L. Carbon sequestration and noise attenuation provided by hedges in Rome: The contribution of hedge traits in decreasing pollution levels. Atmos. Pollut. Res. 2013, 4, 315–322. [Google Scholar] [CrossRef] [Green Version]
- Geneletti, D.; Cortinovis, C.; Zardo, L.; Esmail, B.A. Towards equity in the distribution of ecosystem services in cities. In Planning for Ecosystem Services in Cities; Springer: Cham, Switzerland, 2020; pp. 57–66. [Google Scholar]
- Derkzen, M.L.; van Teeffelen, A.J.; Verburg, P.H. Quantifying urban ecosystem services based on high-resolution data of urban green space: An assessment for Rotterdam, the Netherlands. J. Appl. Ecol. 2015, 52, 1020–1032. [Google Scholar] [CrossRef]
- Ramyar, R. Social–ecological mapping of urban landscapes: Challenges and perspectives on ecosystem services in Mashhad, Iran. Habitat Int. 2019, 92, 102043. [Google Scholar] [CrossRef]
- Cortinovis, C.; Geneletti, D. A performance-based planning approach integrating supply and demand of urban ecosystem services. Landsc. Urban Plan. 2020, 201, 103842. [Google Scholar] [CrossRef]
- Geneletti, D. Reasons and options for integrating ecosystem services in strategic environmental assessment of spatial planning. Int. J. Biodivers. Sci. Ecosyst. Serv. Manag. 2011, 7, 143–149. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016; Available online: https://www.R-project.org/ (accessed on 1 February 2018).
- Hijmans, R.J.; van Etten, J. Raster: Geographic Data Analysis and Modeling. R Package Version 2.5–8. 2016. Available online: https://CRAN.R-project.org/package=raster (accessed on 1 February 2018).
- van Etten, J. R package gdistance: Distances and routes on geographical grids. J. Stat. Softw. 2017, 76, 1–21. [Google Scholar] [CrossRef] [Green Version]
- BCC. Birmingham City Council—Birmingham Tree Policy Report. 2018. Available online: https://www.birmingham.gov.uk/downloads/file/16847/ebd23_bcc_birmingham_tree_policy_report_feb_2018 (accessed on 6 February 2018).
- van Essen, H.; van Wijngaarden, L.; Schroten, A.; de Bruyn, S.; Sutter, D.; Bieler, C.; Beyrouty, K.E. Handbook on the External Costs of Transport; Version 1.1; European Commission; Luxembourg Publications Office of the European Union: Luxembourg, 2019. [Google Scholar]
- DEFRA. Noise Pollution: Economic Analysis. Department for Environment, Food & Rural Affairs, UK Government. 2014. Available online: https://www.gov.uk/guidance/noise-pollution-economic-analysis (accessed on 1 February 2018).
- Holt, A.R.; Mears, M.; Maltby, L.; Warren, P. Understanding spatial patterns in the production of multiple urban ecosystem services. Ecosyst. Serv. 2015, 16, 33–46. [Google Scholar] [CrossRef] [Green Version]
- Cimburova, Z.; Pont, M.B. Location matters. A systematic review of spatial contextual factors mediating ecosystem services of urban trees. Ecosyst. Serv. 2021, 50, 101296. [Google Scholar] [CrossRef]
- Jones, L.; Boeri, M.; Christie, M.; Durance, I.; Evans, K.L.; Fletcher, D.; Harrison, L.; Jorgensen, A.; Masante, D.; McGinlay, J.; et al. Can we model cultural ecosystem services, and are we measuring the right things? People Nat. 2022, 4, 166–179. [Google Scholar] [CrossRef]
- Rogers, K.; van den Bosch, C.K.; Vaughan-Johncey, C. An Urban Forest Master Plan for Birmingham 2021–2051. Executive Report. 2021. Available online: https://secureservercdn.net/160.153.138.71/d9o.bd8.myftpupload.com/wp-content/uploads/2021/11/BUFMPExecReport-Final-Nov-2021-v1.pdf (accessed on 19 November 2021).
- van Renterghem, T.; Attenborough, K.; Jean, P. Designing vegetation and tree belts along roads. In Environmental Methods for Transport Noise Reduction; Nilsson, M., Bengtsson, J., Klæboe, R., Eds.; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Ow, L.F.; Ghosh, S. Urban cities and road traffic noise: Reduction through vegetation. Appl. Acoust. 2017, 120, 15–20. [Google Scholar] [CrossRef]
- Walters, M.; Sinnett, D. Achieving tree canopy cover targets: A case study of Bristol, UK. Urban For. Urban Green. 2021, 65, 127296. [Google Scholar] [CrossRef]
- Fastl, H.; Zwicker, E. Just-Noticeable Sound Changes. In Psychoacoustics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Gulliver, J.; Morley, D.; Vienneau, D.; Fabbri, F.; Bell, M.; Goodman, P.; Beevers, S.; Dajnak, D.; Kelly, F.J.; Fecht, D. Development of an open-source road traffic noise model for exposure assessment. Environ. Model. Softw. 2015, 74, 183–193. [Google Scholar] [CrossRef] [Green Version]
- Syrbe, R.U.; Walz, U. Spatial indicators for the assessment of ecosystem services: Providing, benefiting and connecting areas and landscape metrics. Ecol. Indic. 2012, 21, 80–88. [Google Scholar] [CrossRef]
- Pristeri, G.; Peroni, F.; Pappalardo, S.E.; Codato, D.; Masi, A.; De Marchi, M. Whose Urban Green? Mapping and Classifying Public and Private Green Spaces in Padua for Spatial Planning Policies. ISPRS Int. J. Geo-Inf. 2021, 10, 538. [Google Scholar] [CrossRef]
- Dewaelheyns, V.; Rogge, E.; Gulinck, H. Putting domestic gardens on the agenda using empirical spatial data: The case of Flanders. Appl. Geogr. 2014, 50, 132–143. [Google Scholar] [CrossRef]
- Nemitz, E.; Vieno, M.; Carnell, E.; Fitch, A.; Steadman, C.; Cryle, P.; Holland, M.; Morton, R.D.; Hall, J.; Mills, G.; et al. Potential and limitation of air pollution mitigation by vegetation and uncertainties of deposition-based evaluations. Philos. Trans. R. Soc. A 2020, 378, 20190320. [Google Scholar] [CrossRef] [PubMed]
- Fletcher, D.H.; Likongwe, P.J.; Chiotha, S.S.; Nduwayezu, G.; Mallick, D.; Md, N.U.; Rahman, A.; Golovátina-Mora, P.; Lotero, L.; Bricker, S.; et al. Using demand mapping to assess the benefits of urban green and blue space in cities from four continents. Sci. Total Environ. 2021, 785, 147238. [Google Scholar] [CrossRef]
- Hutchins, M.G.; Fletcher, D.; Hagen-Zanker, A.; Jia, H.; Jones, L.; Li, H.; Loiselle, S.; Miller, J.; Reis, S.; Seifert-Dähnn, I.; et al. Why scale is vital to plan optimal Nature-Based Solutions for resilient cities. Environ. Res. Lett. 2021, 16, 044008. [Google Scholar] [CrossRef]
- Madureira, H.; Andresen, T. Planning for multifunctional urban green infrastructures: Promises and challenges. Urban Des. Int. 2014, 19, 38–49. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land Cover | km2 | Proportion |
|---|---|---|
| Water | 1.5 | 0.5% |
| Built | 147.6 | 55.1% |
| Grass | 41.9 | 15.7% |
| Woodland | 43.1 | 16.1% |
| Other | 33.7 | 12.6% |
| Total | 267.8 | 100% |
| Name | Description | Coverage |
|---|---|---|
| No Woodland | No trees | 0% |
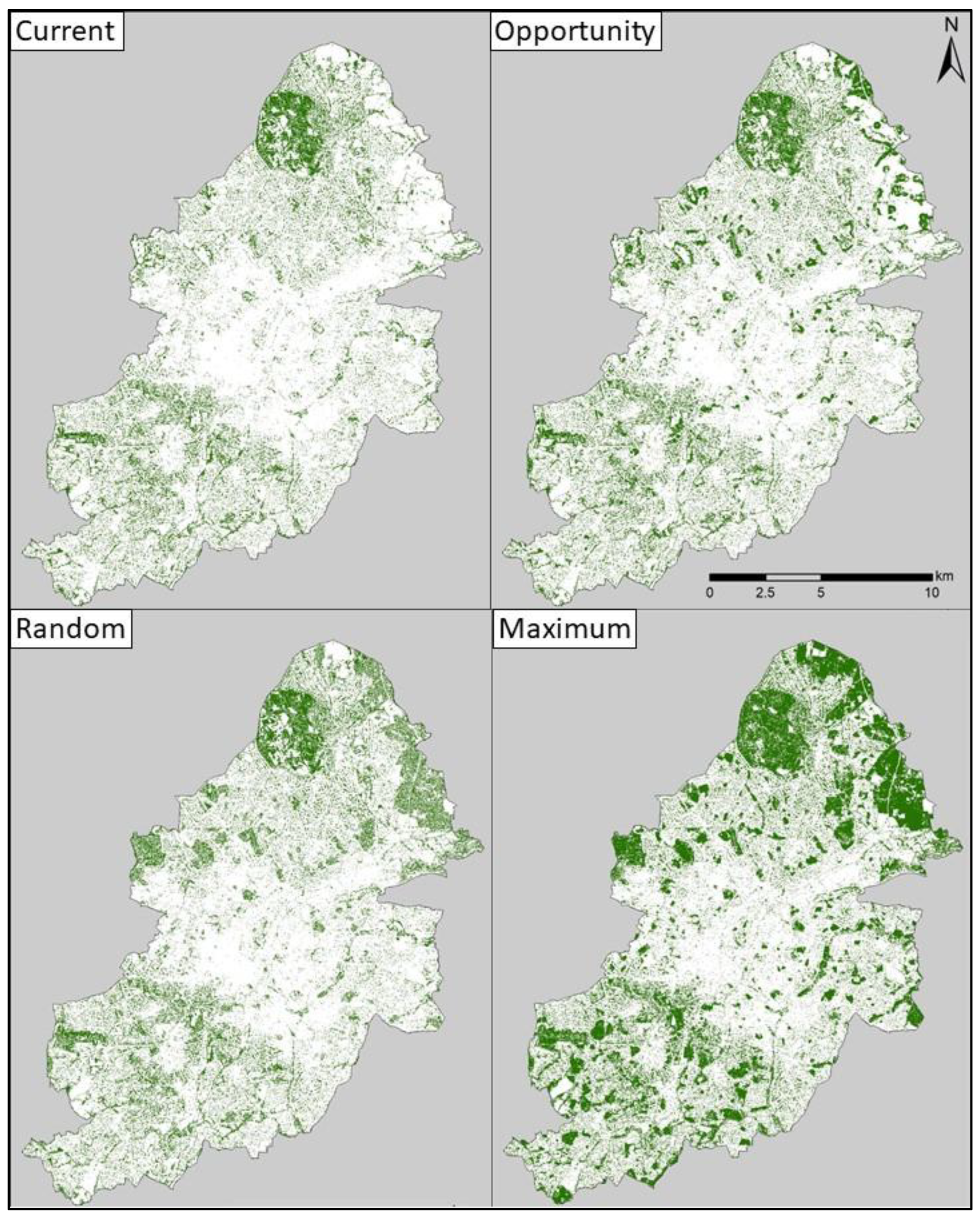
| Current | Current woodland configuration | 16.1% |
| Random | Additional woodland area selected randomly from within grassland areas ≥ 50 dB(A) | 20% |
| Opportunity | Additional woodland area selected from grassland using opportunity map scores | 20% |
| Maximum | All grassland replaced with woodland | 31.8% |
| Lden (db(A)) | Road Transport | ||
|---|---|---|---|
| Annoyance | Health | Total | |
| 50–54 | 14 | 3 | 17 |
| 55–59 | 28 | 3 | 31 |
| 60–64 | 28 | 6 | 34 |
| 65–69 | 54 | 9 | 63 |
| 70–74 | 54 | 13 | 67 |
| ≥75 | 54 | 18 | 72 |
| Scenario | Buildings | Population | Dwellings |
|---|---|---|---|
| Current | 52,066 | 177,446 | 74,993 |
| Random | 56,457 | 196,770 | 83,732 |
| Opportunity | 61,157 | 216,181 | 92,372 |
| Maximum | 62,478 | 221,151 | 94,755 |
| Scenario | Woodland Cover (ha) | Annoyance Cost (Millions) | Health Cost (Millions) | Total Cost (Millions) | Mitigation Value (Millions) | Average Mitigation Value ha−1 |
|---|---|---|---|---|---|---|
| No Woodland | - | GBP 56.76 | GBP 9.98 | GBP 66.74 | - | - |
| Current | 4312 | GBP 53.52 | GBP 9.40 | GBP 62.91 | GBP 3.83 | GBP 887 |
| Random | 5356 | GBP 52.89 | GBP 9.29 | GBP 62.18 | GBP 4.56 | GBP 851 |
| Opportunity | 5356 | GBP 51.60 | GBP 9.05 | GBP 60.65 | GBP 6.09 | GBP 1136 |
| Maximum | 8516 | GBP 51.42 | GBP 9.02 | GBP 60.45 | GBP 6.29 | GBP 738 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fletcher, D.H.; Garrett, J.K.; Thomas, A.; Fitch, A.; Cryle, P.; Shilton, S.; Jones, L. Location, Location, Location: Modelling of Noise Mitigation by Urban Woodland Shows the Benefit of Targeted Tree Planting in Cities. Sustainability 2022, 14, 7079. https://doi.org/10.3390/su14127079
Fletcher DH, Garrett JK, Thomas A, Fitch A, Cryle P, Shilton S, Jones L. Location, Location, Location: Modelling of Noise Mitigation by Urban Woodland Shows the Benefit of Targeted Tree Planting in Cities. Sustainability. 2022; 14(12):7079. https://doi.org/10.3390/su14127079
Chicago/Turabian StyleFletcher, David H., Joanne K. Garrett, Amy Thomas, Alice Fitch, Phil Cryle, Simon Shilton, and Laurence Jones. 2022. "Location, Location, Location: Modelling of Noise Mitigation by Urban Woodland Shows the Benefit of Targeted Tree Planting in Cities" Sustainability 14, no. 12: 7079. https://doi.org/10.3390/su14127079
APA StyleFletcher, D. H., Garrett, J. K., Thomas, A., Fitch, A., Cryle, P., Shilton, S., & Jones, L. (2022). Location, Location, Location: Modelling of Noise Mitigation by Urban Woodland Shows the Benefit of Targeted Tree Planting in Cities. Sustainability, 14(12), 7079. https://doi.org/10.3390/su14127079