
Band-Sensitive Calibration of Low-Cost PM2.5 Sensors by LSTM Model with Dynamically Weighted Loss Function


Abstract
:1. Introduction
2. Literature Review
2.1. The Limitation of Low-Cost Sensors Compared to the Standard Methods of the Government
2.2. Deep Learning Applications for Calibrating Low-Cost Sensors
2.3. Band-Sensitive Calibration for Low-Cost Sensors
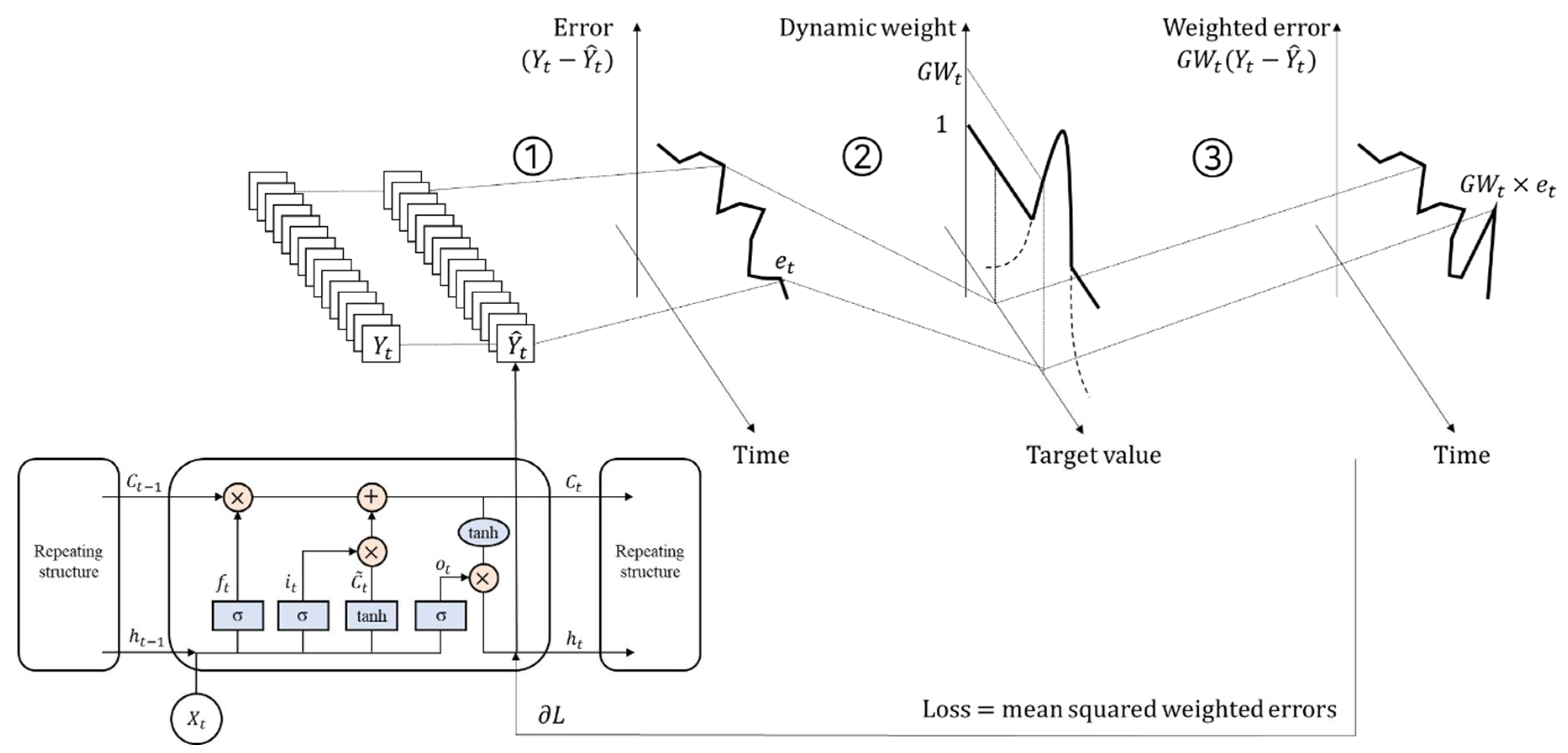
3. Methodology
- The errors are calculated from the outputs of the LSTM model and target values;
- Errors occurred in the band of interest are amplified using their dynamic weight;
- The loss is calculated by loss function, i.e., the mean square error (MSE) in this study, and the gradient is back-propagated to update weights and biases in the LSTM model.
4. Experimental Setup and Preprocessing
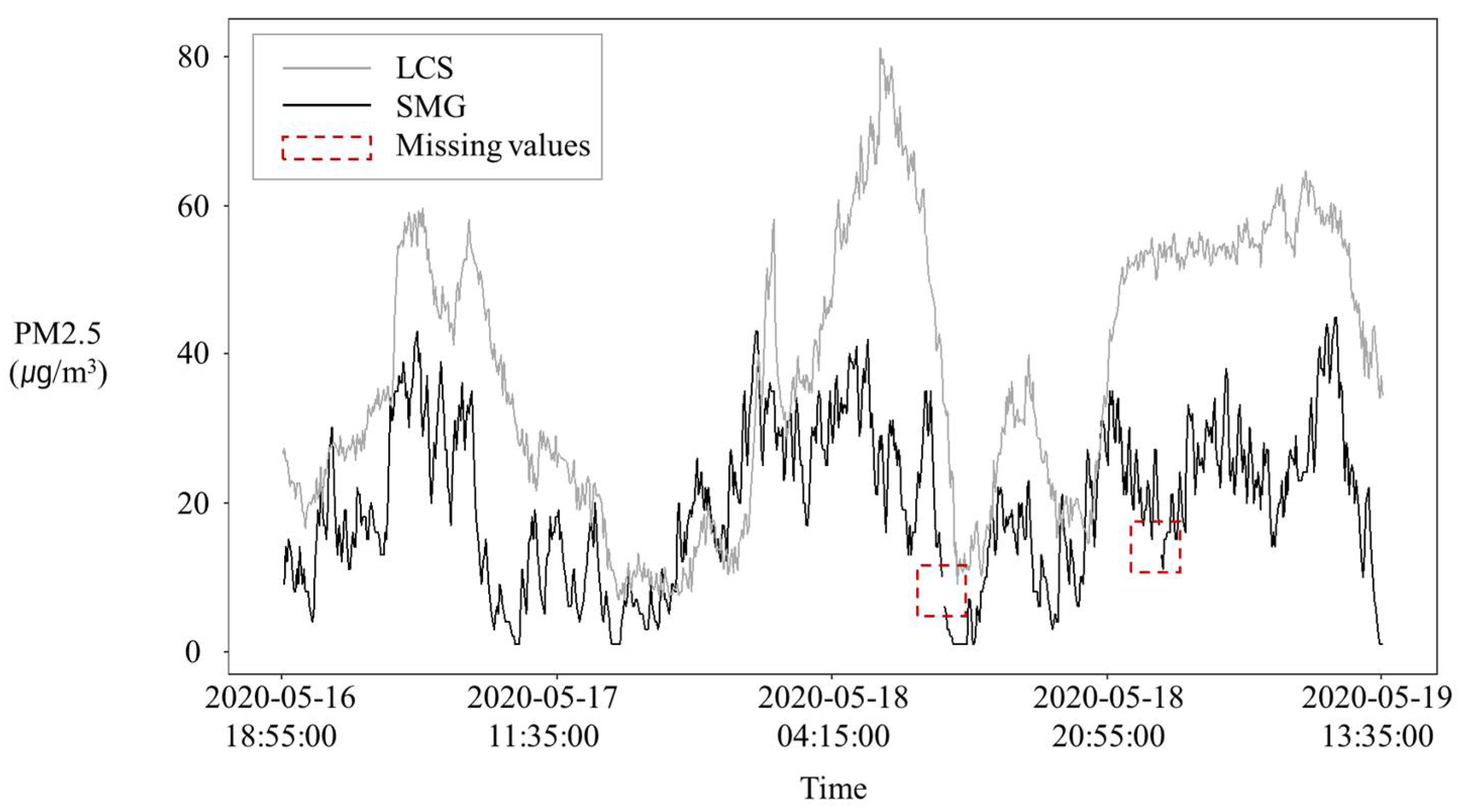
4.1. Experimental Setup and Data Collection
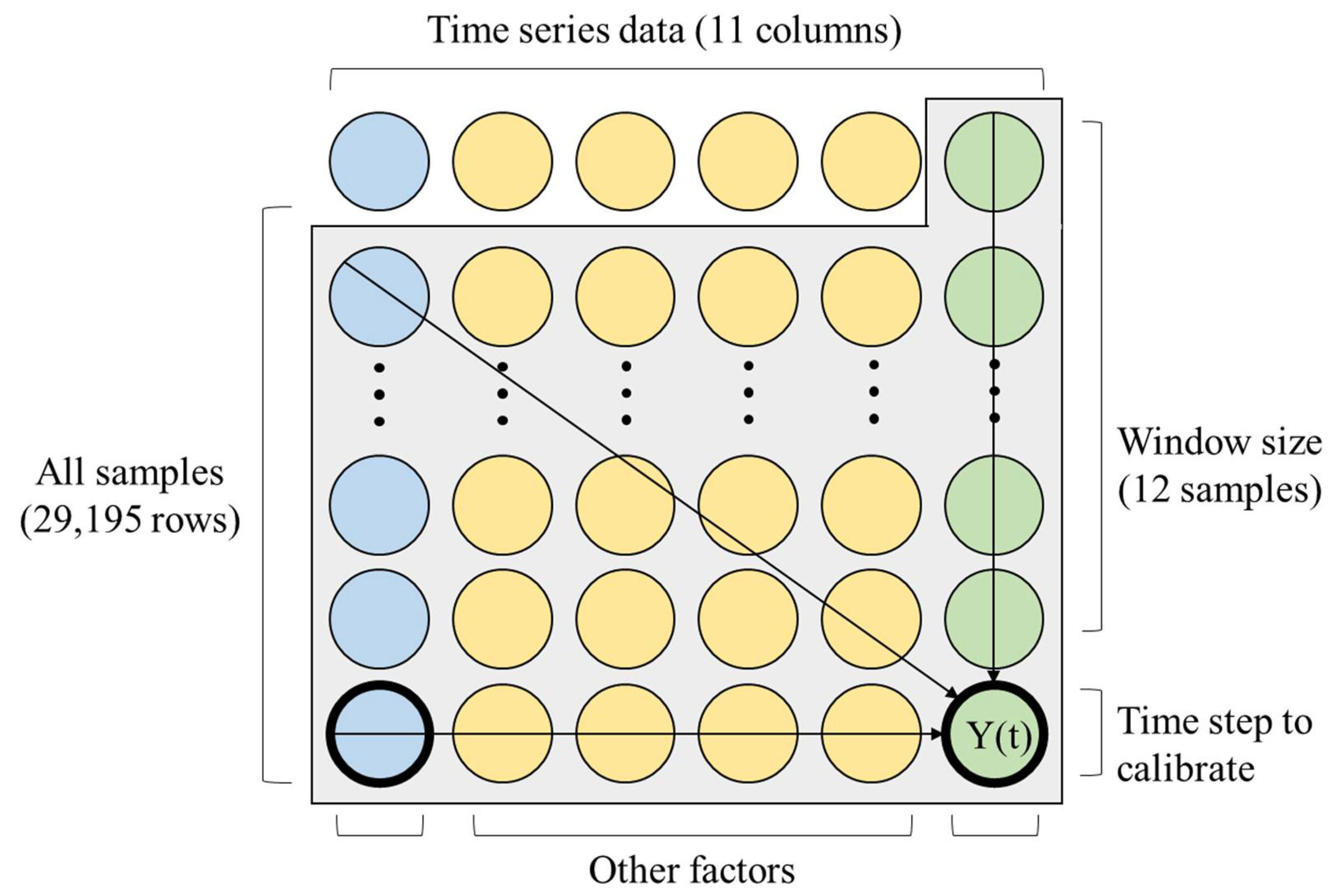
4.2. Data Preprocessing
4.3. Training and Hyperparameter Optimization
5. Results and Discussion
5.1. Effect of Dynamic Weight on Calibration Performance
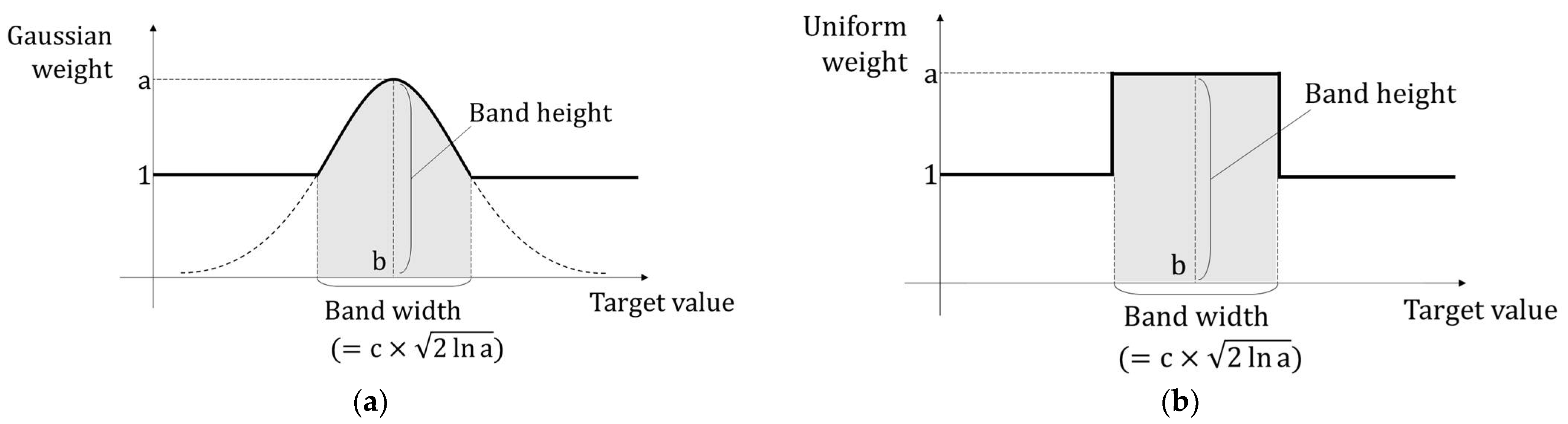
5.2. Effect of Different Weight Functions on Calibration Performance
5.3. Effect of the Center of the Weighted Band on Calibration Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- WHO. Health Effects of Particulate Matter: Policy Implications for Countries in Eastern Europe, Caucasus and Central Asia; WHO: Geneva, Switzerland, 2013; Volume 1, pp. 2–10.
- WHO. 7 Million Premature Deaths Annually Linked to Air Pollution; WHO: Geneva, Switzerland, 2014. Available online: https://www.who.int/news/item/25-03-2014-7-million-premature-deaths-annually-linked-to-air-pollution (accessed on 30 March 2022).
- Jung, H.J. The Impact of Ambient Fine Particulate Matter on Consumer Expenditures. Sustainability 2020, 12, 1855. [Google Scholar] [CrossRef] [Green Version]
- Cho, E.M.; Jeon, H.J.; Yoon, D.K.; Park, S.H.; Hong, H.J.; Choi, K.Y.; Cho, H.W.; Cheon, H.C.; Lee, C.M. Reliability of Low-Cost, Sensor-Based Fine Dust Measurement Devices for Monitoring Atmospheric Particulate Matter Concentrations. Int. J. Environ. Res. Public Health 2019, 16, 1430. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, S.; An, J.; Jo, Y. Review of analysis principle of fine dust. Korean Ind. Chem. News 2018, 21, 16–23. [Google Scholar]
- Gao, M.L.; Cao, J.J.; Seto, E. A distributed network of low-cost continuous reading sensors to measure spatiotemporal variations of PM2.5 in Xi’an, China. Environ. Pollut. 2015, 199, 56–65. [Google Scholar] [CrossRef] [Green Version]
- Bodor, M. A Study on Indoor Particulate Matter Variation in Time Based on Count and Sizes and in Relation to Meteorological Conditions. Sustainability 2021, 13, 8263. [Google Scholar] [CrossRef]
- Liang, C.J.; Yu, P.R. Assessment and Improvement of Two Low-Cost Particulate Matter Sensor Systems by Using Spatial Interpolation Data from Air Quality Monitoring Stations. Atmosphere 2021, 12, 300. [Google Scholar] [CrossRef]
- Holder, A.L.; Mebust, A.K.; Maghran, L.A.; McGown, M.R.; Stewart, K.E.; Vallano, D.M.; Elleman, R.A.; Baker, K.R. Field Evaluation of Low-Cost Particulate Matter Sensors for Measuring Wildfire Smoke. Sensors 2020, 20, 4796. [Google Scholar] [CrossRef]
- Matos, T.; Faria, C.L.; Martins, M.S.; Henriques, R.; Gomes, P.A.; Goncalves, L.M. Development of a Cost-Effective Optical Sensor for Continuous Monitoring of Turbidity and Suspended Particulate Matter in Marine Environment. Sensors 2019, 19, 4439. [Google Scholar] [CrossRef] [Green Version]
- Trilles, S.; Vicente, A.B.; Juan, P.; Ramos, F.; Meseguer, S.; Serra, L. Reliability Validation of a Low-Cost Particulate Matter IoT Sensor in Indoor and Outdoor Environments Using a Reference Sampler. Sustainability 2019, 11, 7220. [Google Scholar] [CrossRef] [Green Version]
- Jagatha, J.V.; Klausnitzer, A.; Chacon-Mateos, M.; Laquai, B.; Nieuwkoop, E.; van der Mark, P.; Vogt, U.; Schneider, C. Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research. Sensors 2021, 21, 3960. [Google Scholar] [CrossRef]
- Sayahi, T.; Kaufman, D.; Becnel, T.; Kaur, K.; Butterfield, A.E.; Collingwood, S.; Zhang, Y.; Gaillardon, P.E.; Kelly, K.E. Development of a calibration chamber to evaluate the performance of low-cost particulate matter sensors. Environ. Pollut. 2019, 255, 113131. [Google Scholar] [CrossRef] [PubMed]
- Jayaratne, R.; Liu, X.T.; Thai, P.; Dunbabin, M.; Morawska, L. The influence of humidity on the performance of a low-cost air particle mass sensor and the effect of atmospheric fog. Atmos. Meas. Tech. 2018, 11, 4883–4890. [Google Scholar] [CrossRef] [Green Version]
- Wanjura, J.D.; Shaw, B.W.; Parnell, C.B.; Lacey, R.E.; Capareda, S.C. Comparison of continuous monitor (TEOM) and gravimetric sampler particulate matter concentrations. Trans. Asabe 2008, 51, 251–257. [Google Scholar] [CrossRef]
- Mei, H.; Han, P.F.; Wang, Y.N.; Zeng, N.; Liu, D.; Cai, Q.X.; Deng, Z.Z.; Wang, Y.H.; Pan, Y.P.; Tang, X. Field Evaluation of Low-Cost Particulate Matter Sensors in Beijing. Sensors 2020, 20, 4381. [Google Scholar] [CrossRef]
- Brattich, E.; Bracci, A.; Zappi, A.; Morozzi, P.; Di Sabatino, S.; Porcu, F.; Di Nicola, F.; Tositti, L. How to Get the Best from Low-Cost Particulate Matter Sensors: Guidelines and Practical Recommendations. Sensors 2020, 20, 3073. [Google Scholar] [CrossRef]
- Schwarz, A.D.; Meyer, J.; Dittler, A. Opportunities for Low-Cost Particulate Matter Sensors in Filter Emission Measurements. Chem. Eng. Technol. 2018, 41, 1826–1832. [Google Scholar] [CrossRef] [Green Version]
- Zusman, M.; Schumacher, C.S.; Gassett, A.J.; Spalt, E.W.; Austin, E.; Larson, T.V.; Carvlin, G.; Seto, E.; Kaufman, J.D.; Sheppard, L. Calibration of low-cost particulate matter sensors: Model development for a multi-city epidemiological study. Environ. Int. 2020, 134, 105329. [Google Scholar] [CrossRef]
- Badura, M.; Batog, P.; Drzeniecka-Osiadacz, A.; Modzel, P. Evaluation of Low-Cost Sensors for Ambient PM2.5 Monitoring. J. Sens. 2018, 2018, 5096540. [Google Scholar] [CrossRef] [Green Version]
- Sousan, S.; Gray, A.; Zuidema, C.; Stebounova, L.; Thomas, G.; Koehler, K.; Peters, T. Sensor Selection to Improve Estimates of Particulate Matter Concentration from a Low-Cost Network. Sensors 2018, 18, 3008. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.T.; Zhao, Q.; Zhu, S.C.; Peng, W.J.; Yu, L. An experimental application of laser-scattering sensor to estimate the traffic-induced PM2.5 in Beijing. Environ. Monit. Assess. 2020, 192, 1–15. [Google Scholar] [CrossRef]
- Zheng, T.S.; Bergin, M.H.; Johnson, K.K.; Tripathi, S.N.; Shirodkar, S.; Landis, M.S.; Sutaria, R.; Carlson, D.E. Field evaluation of low-cost particulate matter sensors in high-and low-concentration environments. Atmos. Meas. Tech. 2018, 11, 4823–4846. [Google Scholar] [CrossRef] [Green Version]
- Liang, L. Calibrating low-cost sensors for ambient air monitoring: Techniques, trends, and challenges. Environ. Res. 2021, 197, 111163. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.W.; Du, Y.J.; Wang, J.N.; Li, T.T. Calibration of a low-cost PM2.5 monitor using a random forest model. Environ. Int. 2019, 133, 105161. [Google Scholar] [CrossRef] [PubMed]
- Johnson, N.E.; Bonczak, B.; Kontokosta, C.E. Using a gradient boosting model to improve the performance of low-cost aerosol monitors in a dense, heterogeneous urban environment. Atmos. Environ. 2018, 184, 9–16. [Google Scholar] [CrossRef] [Green Version]
- Loh, B.G.; Choi, G.H. Calibration of Portable Particulate Matter-Monitoring Device using Web Query and Machine Learning. Saf. Health Work. 2019, 10, 452–460. [Google Scholar] [CrossRef]
- Wang, W.C.V.; Lung, S.C.C.; Liu, C.H. Application of Machine Learning for the in-Field Correction of a PM2.5 Low-Cost Sensor Network. Sensors 2020, 20, 5002. [Google Scholar] [CrossRef]
- Li, T.Y.; Hua, M.; Wu, X. A Hybrid CNN-LSTM Model for Forecasting Particulate Matter (PM2.5). IEEE Access 2020, 8, 26933–26940. [Google Scholar] [CrossRef]
- Rengasamy, D.; Jafari, M.; Rothwell, B.; Chen, X.; Figueredo, G.P. Deep Learning with Dynamically Weighted Loss Function for Sensor-Based Prognostics and Health Management. Sensors 2020, 20, 723. [Google Scholar] [CrossRef] [Green Version]
- Ryu, Y.H.; Min, S.K. What matters in public perception and awareness of air quality? Quantitative assessment using internet search volume data. Environ. Res. Lett. 2020, 15, 0940b4. [Google Scholar] [CrossRef]
- Byun, S.; Kim, S.Y. Has Air Pollution Concentration Increased over the Past 17 Years in Seoul, South Korea?: The Gap between Public Perception and Measurement Data. J. Korean Soc. Atmos. Environ. 2020, 36, 240–248. [Google Scholar] [CrossRef]
- Kim, H.; Kang, K.; Kim, T. Measurement of Particulate Matter (PM2.5) and Health Risk Assessment of Cooking-Generated Particles in the Kitchen and Living Rooms of Apartment Houses. Sustainability 2018, 10, 843. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Yong, Z. Digital Universal Particle Concentration Sensor: PMS7003M Series Data Manual. 2017. Available online: https://eleparts.co.kr/data/goods_old/data/DS_PMS7003M.pdf (accessed on 30 March 2022).
- Model 5014i Beta Continuous Particulate Monitor: Automated Ambient Particulate Measurement Utilizing Beta Attenuation. 2020. Available online: https://www.thermofisher.com/document-connect/document-connect.html?url=https://assets.thermofisher.com/TFS-Assets%2FCAD%2FSpecification-Sheets%2FD00882.pdf (accessed on 30 March 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Good (I) | Normal (II) | Bad (III) | Very Bad (IV) |
|---|---|---|---|---|
| Concentration of PM2.5 (µg/m3) | 0~15 | 16~35 | 36~75 | 76~ |
| Data | Units | Mean | Median | Standard Deviation | Minimum | Maximum |
|---|---|---|---|---|---|---|
| PM2.5 (LCS) | μg/m3 | 24.63 | 22.09 | 19.03 | 0.00 | 121.62 |
| PM2.5 (SMG) | μg/m3 | 12.71 | 10.00 | 10.99 | 0.00 | 118.00 |
| CO2 | ppm | 433.95 | 425.68 | 25.27 | 400.26 | 550.00 |
| VOC | ppm | 673.40 | 519.29 | 56.60 | 9.89 | 6172.90 |
| SO2 | ppm | 0.00 | 0.00 | 0.01 | 0.00 | 0.47 |
| CO | ppm | 0.38 | 0.3 | 0.57 | 0.10 | 40.50 |
| O3 | ppm | 0.04 | 0.03 | 0.02 | 0.00 | 0.42 |
| NO2 | ppm | 0.01 | 0.01 | 0.01 | 0.00 | 0.05 |
| Temperature | °C | 24.6 | 24.7 | 3.9 | 12.7 | 35.3 |
| Relative humidity | % | 82.1 | 87.1 | 15.4 | 26.5 | 96.9 |
| Wind speed | m/s | 1.40 | 1.14 | 1.08 | 0.00 | 8.48 |
| Type of Weight | a | b | c | Section | What Is Different | Purpose |
|---|---|---|---|---|---|---|
| Dynamic weight | 3.5 to 20 by 1.5 | 20 | 2 to 6 by 1 | 4.1 | Width and height of band | To check the performance in a band |
| Both dynamic and uniform weight | 6 | 20 | 20 | 4.2 | Width and height of band | To check the performance in intervals |
| Both dynamic and uniform weight | 6 | 5, 20, 35 | 5 | 4.3 | Center of band | To check the performance in intervals |
| Window Size | Epoch | Layer | Hidden Neuron | Learning Rate | Dropout |
|---|---|---|---|---|---|
| 12 | 1500 | 2 | 10 | 0.001 | 0.3 |
| The Type of Loss Function | a | b | c | RMSE | RMSE in Band | MAPE | MAPE in Band |
|---|---|---|---|---|---|---|---|
| MSE | - | - | - | 3.50 (0.19) | 4.25 (0.23) | 68.38 (7.76) | 17.84 (1.50) |
| GW 1 | 6 | 20 | 3.5 | 3.16 (0.16) | 4.06 (0.27) | 65.84 (8.13) | 16.80 (1.15) |
| GW | 6 | 20 | 5 | 3.12 (0.15) | 3.98 (0.21) | 67.67 (7.25) | 16.57 (0.91) |
| GW | 2 | 20 | 8 | 3.36 (0.33) | 4.10 (0.43) | 68.69 (11.90) | 17.16 (1.96) |
| GW | 6 | 20 | 8 | 3.08 (0.17) | 3.96 (0.21) | 67.85 (7.31) | 16.37 (0.89) |
| GW | 6 | 20 | 20 | 3.06 (0.11) | 3.77 (0.17) | 61.53 (7.23) | 15.42 (0.68) |
| GW | 2 | 20 | 20 | 3.39 (0.34) | 4.25 (0.46) | 67.54 (10.12) | 17.73 (2.05) |
| The Type of Loss Function | a | b | c | RMSE in (0,10) | RMSE in (15,25) | RMSE in (30,40) | MAPE in (0,10) | MAPE in (15,25) | MAPE in (30,40) |
|---|---|---|---|---|---|---|---|---|---|
| MSE | - | - | - | 2.94 (0.22) | 4.25 (0.31) | 4.10 (0.30) | 107.15 (14.25) | 17.86 (1.46) | 9.74 (0.67) |
| GW 1 | 6 | 5 | 5 | 2.62 (0.38) | 4.16 (0.41) | 4.57 (0.53) | 71.25 (14.10) | 17.42 (1.85) | 11.01 (1.41) |
| GW | 6 | 20 | 5 | 2.52 (0.21) | 3.98 (0.23) | 4.14 (0.32) | 107.67 (13.00) | 16.54 (1.01) | 9.95 (0.74) |
| GW | 6 | 35 | 5 | 3.34 (0.27) | 4.15 (0.27) | 4.46 (0.39) | 135.10 (17.41) | 16.95 (1.05) | 10.65 (0.89) |
| UW 2 | 6 | 5 | 5 | 2.38 (0.26) | 4.12 (0.44) | 4.60 (0.38) | 78.84 (12.52) | 17.18 (1.97) | 11.10 (0.96) |
| UW | 6 | 20 | 5 | 2.42 (0.22) | 4.02 (0.26) | 4.36 (0.29) | 107.08 (13.17) | 16.71 (1.10) | 10.51 (0.69) |
| UW | 6 | 35 | 5 | 3.36 (0.25) | 4.08 (0.43) | 4.77 (0.40) | 141.39 (18.15) | 16.55 (1.77) | 11.39 (0.97) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ryu, J.; Park, H. Band-Sensitive Calibration of Low-Cost PM2.5 Sensors by LSTM Model with Dynamically Weighted Loss Function. Sustainability 2022, 14, 6120. https://doi.org/10.3390/su14106120
Ryu J, Park H. Band-Sensitive Calibration of Low-Cost PM2.5 Sensors by LSTM Model with Dynamically Weighted Loss Function. Sustainability. 2022; 14(10):6120. https://doi.org/10.3390/su14106120
Chicago/Turabian StyleRyu, Jewan, and Heekyung Park. 2022. "Band-Sensitive Calibration of Low-Cost PM2.5 Sensors by LSTM Model with Dynamically Weighted Loss Function" Sustainability 14, no. 10: 6120. https://doi.org/10.3390/su14106120
APA StyleRyu, J., & Park, H. (2022). Band-Sensitive Calibration of Low-Cost PM2.5 Sensors by LSTM Model with Dynamically Weighted Loss Function. Sustainability, 14(10), 6120. https://doi.org/10.3390/su14106120