
Evaluating Farm Management Performance by the Choice of Pest-Control Sprayers in Rice Farming in Japan

Abstract
1. Introduction
2. Methodology
2.1. Cost Analysis of Pest-Control Sprayers
2.2. Working Capacity
2.3. Management Efficiency
2.3.1. Data Envelopment Analysis
2.3.2. Estimation of Management Efficiency
s.t. v1x1o = 1
u1y1k + u2y2k ≦ v1x1k (k = 1, …, n)
v1, u1, u2 ≧ 0
3. Results
3.1. Pest-Control Cost
3.2. Working Capacity
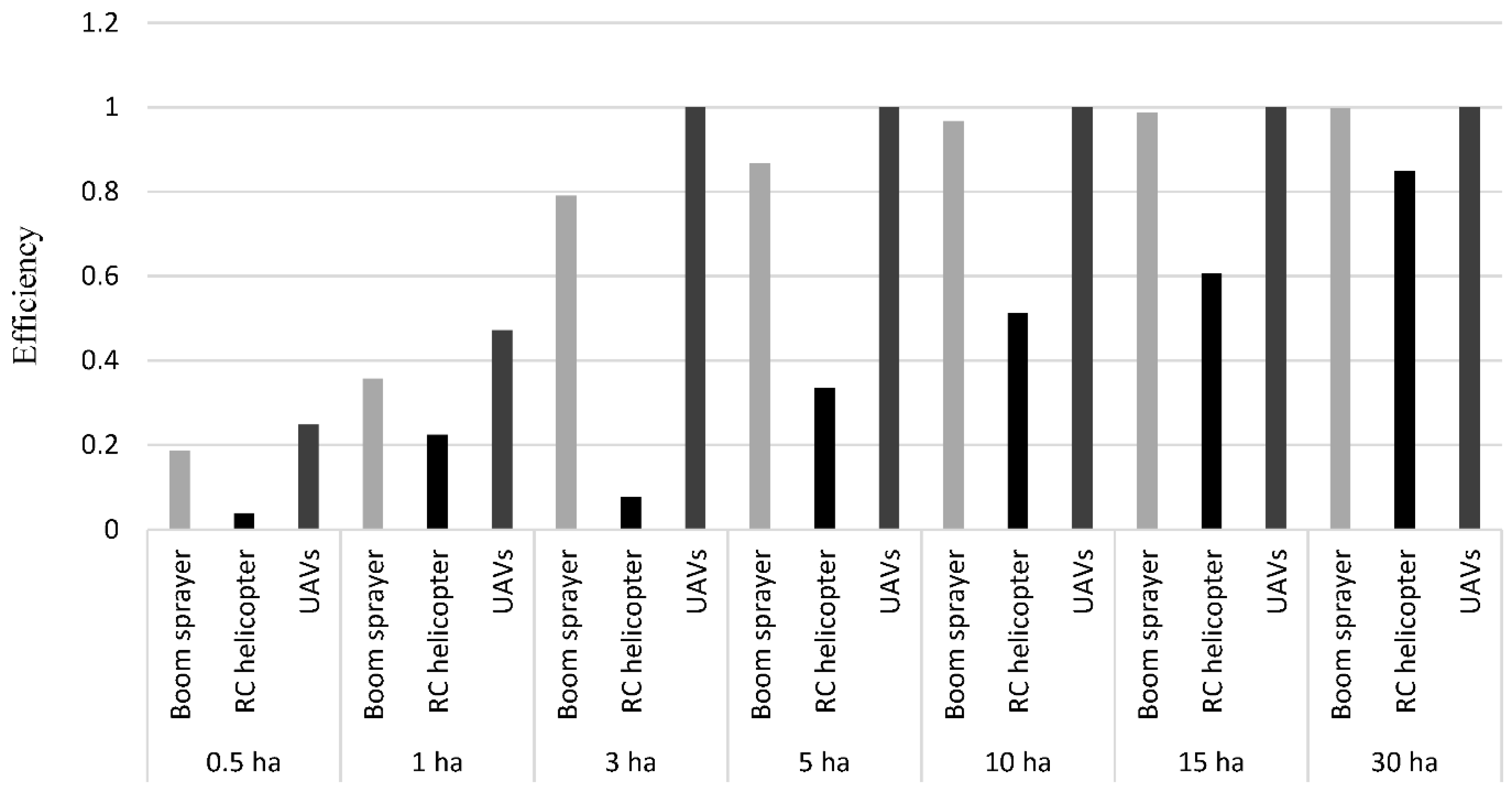
3.3. Management Efficiency
4. Discussion
4.1. Validity of UAVs in Rice Production
4.2. Challenges to Implementing UAVs in the Agriculture Sector
4.3. Future Application of UAVs in Agriculture
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- MAFF. Development of Smart Agriculture. 2018. Available online: https://www.affrc.maff.go.jp/docs/smart_agri_pro/attach/pdf/smart_agri_pro-11.pdf (accessed on 19 September 2020).
- MAFF. Smart Agriculture Demonstration Project. 2018. Available online: https://www.affrc.maff.go.jp/docs/smart_agri_pro/attach/pdf/smart_agri_pro-20.pdf (accessed on 19 September 2020).
- MAFF. The Implementation Status of Aerial Spraying of Pesticides. 2016. Available online: https://www.maff.go.jp/j/syouan/syokubo/gaicyu/g_kouku_zigyo/attach/pdf/index-46.pdf (accessed on 25 September 2020).
- MAFF. The Implementation Status of Aerial Spraying of Pesticides. 2019. Available online: https://www.maff.go.jp/j/syouan/syokubo/gaicyu/g_kouku_zigyo/attach/pdf/index-49.pdf (accessed on 25 September 2020).
- Tsuruta, M.; Takahashi, M. Simulations of field capacity and coverage of agricultural machines. Tohoku Agric. Res. 1993, 46, 107–108. [Google Scholar]
- Matsuoto, K.; Miyaoto, T.; Yonetani, T. Management evaluation of new mechanized technology centered on paddy rice pest control method. Bull. Hyogo Prefect. Agric. Inst. 1998, 46, 27–32. [Google Scholar]
- MAFF. Formulation of a Plan for the Introduction of Specified High-Performance Agricultural Machinery and Its Handling-Guideline. 2013. Available online: https://www.maff.go.jp/j/seisan/sien/sizai/s_kikaika/hosin/pdf/guide_line.pdf (accessed on 23 October 2020).
- Sun, W. Labor-saving control technology using multicopters in mountainous areas. NARO Tech. Rep. 2020, 5, 30–33. [Google Scholar]
- Matsumoto, K.; Umemoto, M. Effect of introducing agricultural operating robots in large-scale paddy field management. Kanto Tokai J. Farm Manag. 2013, 103, 65–71. [Google Scholar]
- Matsukura, S.; Nanseki, T.; Fujii, Y.; Sato, M.; Chomei, Y.; Miyazumi, M. Effect of farming skill and farm size on production costs on large rice farms: A simulation analysis by FAPS-DB. Agric. Inf. Res. 2015, 24, 35–45. [Google Scholar]
- Matsumoto, K. Evaluation and prospect of management evaluation method of smart agricultural technology. Bull. NARO 2019, 1, 33–37. [Google Scholar]
- MAFF. Statistics of Agriculture, Forestry, and Fisheries. 2020. Available online: https://www.maff.go.jp/j/tokei/kouhyou/noubukka/attach/pdf/index-81.pdf (accessed on 23 August 2020).
- National Tax Agency (NTA). Service Lives (Machinery, Instrument). Available online: https://www.keisan.nta.go.jp/h30yokuaru/aoiroshinkoku/hitsuyokeihi/genkashokyakuhi/taiyonensukikai.html (accessed on 30 September 2020).
- Japan Agricultural Mechanization Association (JAMA). Basic Policy Reference Materials for Test Research, Promotion and Introduction of High-Performance Agricultural Machinery, etc.; Japan Agricultural Mechanization Association (JAMA): Tokyo, Japan, 2008. [Google Scholar]
- Yamaguchi Prefecture. Guidelines for the Introduction of High-Performance Agricultural Machinery. 2019. Available online: https://www.pref.yamaguchi.lg.jp/cmsdata/7/f/8/7f8b98f9e6953171a99e0ce74b989db6.pdf (accessed on 25 September 2020).
- FAO. Pesticides Average Use Per Area of Cropland. Available online: http://www.fao.org/faostat/en/#data/EP/visualize (accessed on 14 October 2020).
- MAFF. Survey on the Supply of Agricultural Materials in Japan and Overseas. 2019. Available online: https://www.maff.go.jp/j/press/seisan/sizai/attach/pdf/190802-2.pdf (accessed on 23 August 2020).
- Japan Crop Protection Association (JCPA). Laws Related to Pesticides. 2020. Available online: https://www.jcpa.or.jp/qa/a6_24.html (accessed on 2 August 2020).
- Aichi Prefecture. Basic Policy on Test Research, Promotion and Introduction of High-Performance Agricultural Machinery. 2013. Available online: https://www.pref.aichi.jp/engei/daizu-mugi/up-h250708/01sagyou.pdf (accessed on 3 August 2020).
- Hiroshima Prefecture. Concept of Machine Selection, Guide for Fostering Village Corporations. 2012. Available online: https://www.pref.hiroshima.lg.jp/soshiki/81/syuurakuhoujinnikuseinotebiki.html (accessed on 4 October 2020).
- Ibaraki Prefectural Agricultural Revitalization Council. Concept of Farm Area Related to Machine Introduction. 2013. Available online: http://www.ibaraki-suiden.jp/data/jyosei/sn2_28.pdf (accessed on 4 October 2020).
- Hokkaido Prefecture. Agricultural Machinery Introduction Plan Formulation Guide. 2014. Available online: http://www.pref.hokkaido.lg.jp/ns/gjf/kankyo/tokuteikouseinou_keikaku.pdf (accessed on 3 October 2020).
- Coelli, T. A Guide to DEAP Version 2.1: A Data Envelopment Analysis (Computer) Program; Centre for Efficiency and Productivity Analysis; University of New England: Armidale, Australia, 1996. [Google Scholar]
- Cooper, W.W.; Seifbrd, L.M.; Tone, K. Introduction to Data Envelopment Analysis and Its Uses; with DEA-Solver Software and References; Springer Sciences & Business Media. LLC: Berlin/Heidelberg, Germany, 2006. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W.; Rhodes, E. Measuring the efficiency of decision-making units. EJOR 1978, 2, 429–444. [Google Scholar] [CrossRef]
- Fukuda, A.; Nakamura, E.; Morisugi, M.; Imura, H. Research on eco-efficiency seen from land use and agricultural production. Environ. Syst. Res. 2003, 31, 91–99. [Google Scholar] [CrossRef]
- Toma, E.; Dobre, C.; Dona, I.; Cofas, E. DEA applicability in assessment of agriculture efficiency on areas with similar geographically patterns. Agric. Agric. Sci. Procedia 2015, 6, 704–711. [Google Scholar] [CrossRef]
- MAFF. Agriculture and Forestry Census. 2015. Available online: https://www.e-stat.go.jp/stat-search/files?page=1&layout=datalist&toukei=00500209&tstat=000001032920&cycle=7&year=20150&month=0&tclass1=000001077437&tclass2=000001077396&tclass3=000001085297 (accessed on 17 September 2020).
- Ministry of Land, Infrastructure, Transport and Tourism (MLIT). Guidelines for Safe Flight of Unmanned Aerial Vehicles (Drones, Radio-Controlled Aircraft, etc.). 2019. Available online: https://www.mlit.go.jp/common/001303818.pdf (accessed on 25 August 2020).
- Basso, A.; Funari, S. Constant and variable returns to scale DEA models for socially responsible investment funds. Eur. J. Oper. Res. 2014, 235, 775–783. [Google Scholar] [CrossRef]
- Oyerinde, Y.; Bankole, F. Influence of Constant Returns to Scale and Variable Returns to Scale Data Envelopment Analysis Models in ICT Infrastructure Efficiency Utilization. In Proceedings of the 11th Annual Pre-ICIS SIG GlobDev Workshop, San Francisco, CA, USA, 13 December 2018. [Google Scholar]
- Aldaz, N.; Millan, J.A. Regional productivity of Spanish agriculture in a panel DEA framework. Appl. Econ. Lett. 2003, 10, 87–90. [Google Scholar] [CrossRef]
- Diaz, J.A.; Poyato, E.C.; Luque, R.L. Applying benchmarking and data envelopment analysis (DEA) techniques to irrigation districts in Spain. Irrig. Drain. 2004, 53, 135–143. [Google Scholar] [CrossRef]
- Sakai, H.; Tanaka, R.; Endo, G. Operation sequence in direct sowing rice cultivation by radio controlled helicopter. Tohoku Agric. Res. 1997, 50, 23–24. [Google Scholar]
- Fuji Keizai. Agribusiness Status and Future Prospects 2018; Fuji Keizai: Tokyo, Japan, 2018. [Google Scholar]
- Azumino City. Agricultural Work Standard Labor Wage/Machine Work Fee Agreement Table 2020. 2020. Available online: https://www.city.azumino.nagano.jp/soshiki/49/1589.html (accessed on 2 August 2020).
- JA Utsunomiya. The Implementation of Pesticide Spraying Control of Paddy Fields by Radio-Controlled Helicopter 2020. 2020. Available online: https://www.jau.or.jp/info/1204/ (accessed on 2 August 2020).
- JA Chichibu. Pest-Control with a Radio-Controlled Helicopter. Available online: https://www.ja-chichibu.jp/news/%E3%83%A9%E3%82%B8%E3%82%B3%E3%83%B3%E3%83%98%E3%83%AA%E3%81%A7%E7%97%85%E5%AE%B3%E8%99%AB%E9%98%B2%E9%99%A4.html (accessed on 2 August 2020).
- Meng, Y.; Lan, Y.; Mei, G.; Guo, Y.; Song, J.; Wang, Z. Effect of aerial spray adjuvant applying on the efficiency of small unmanned aerial vehicle for wheat aphids control. Int. J. Agric. Biol. Eng. 2018, 11, 46–53. [Google Scholar] [CrossRef]
- MAFF. Current Situation over Pesticides. 2016. Available online: https://www.maff.go.jp/j/seisan/sien/sizai/noyaku/attach/pdf/index-1.pdf (accessed on 23 August 2020).
- MAFF. Agricultural Management Statistics Survey. 2015. Available online: https://www.e-stat.go.jp/dbview?sid=0003190950 (accessed on 30 September 2020).
- MAFF. Agricultural Drones. Available online: https://www.maff.go.jp/j/kanbo/smart/pdf/hukyuukeikaku.pdf (accessed on 19 September 2020).
- Agriculture, Forestry and Fisheries Aviation Association (AFFA). Introduction of AFFA. Available online: http://www.j3a.or.jp/intro_201709.pdf (accessed on 24 February 2021).
- Hokkaido Prefecture. Utilization of Drones in the Primary Industry Field. 2019. Available online: http://www.pref.hokkaido.lg.jp/ss/ssa/siryo2.pdf (accessed on 25 August 2020).
- Bamon, N.; Oomura, K.; Tameike, Y.; Uemuro, K. Differences between Downwash of Agricultural Drones and Unmanned Helicopters and Liquid Spraying Characteristics; Kyushu Okinawa Agricultural Experiment Research Results Information; Kyushu Okinawa Agricultural Research Center, NARO: Koshi, Japan, 2019.
- Mogili, U.R.; Deepak, B.B.V.L. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Freeman, P.K.; Freeland, R.S. Agricultural UAVs in the US: Potential, policy, and hype. RSASE 2015, 2, 35–43. [Google Scholar]
- Sugiura, R. High-throughput field phenotyping using aerial imagery from drone. J. Robot. Soc. Jpn. 2019, 35, 369–371. [Google Scholar] [CrossRef][Green Version]
- Simelli, I.; Tsagaris, A. The Use of Unmanned Aerial Systems (UAS) in Agriculture. In Proceedings of the 7th International Conference on Information and Communication Technologies in Agriculture, Food and Environment (HAICTA) 2015, Kavala, Greece, 17–20 September 2015; pp. 730–1498. Available online: http://ceur-ws.org/Vol-1498/HAICTA_2015_Proceedings.pdf (accessed on 19 September 2020).
- Veroustraete, F. The rise of the drones in agriculture. ECAG 2015, 2, 325–327. [Google Scholar]
- Bendig, J.; Bolten, A.; Bareth, G. Introducing a low-cost mini-UAV for thermal-and multispectral-imaging. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 345–349. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Nonami, K. Global drone development trends and challenges and prospects from agricultural applications. J. Soc. Instrum. Control Eng. 2016, 55, 780–787. [Google Scholar]
- Hama, A.; Tanaka, K.; Den, H.; Kondoh, A. Comparison and consideration of near-infrared cameras for drones: RedEdge and Yubaflex. J. Remote Sens. Soc. Jpn. 2018, 38, 451–457. [Google Scholar]
- Reinecke, M.; Prinsloo, T. The influence of drone monitoring on crop health and harvest size. In Proceedings of the 2017 1st International Conference on Next Generation Computing Applications (NextComp), Mauritius, 19–21 July 2017; pp. 5–10. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Kumar, A.; Singh, G.K. Feature extraction using Normalized Difference Vegetation Index (NDVI): A case study of Jabalpur city. Procedia Technol. 2012, 6, 612–621. [Google Scholar] [CrossRef]
- MAFF. Land Improvement Facility Information Infrastructure Maintenance Promotion Survey. 2020. Available online: https://www.maff.go.jp/j/nousin/soumu/yosan/R1hojyo/attach/pdf/index-23.pdf (accessed on 3 September 2020).
- Matsumoto, K.; Yamamoto, J.; Sekino, K. The factor in introducing the new technology that involve capital investment. Jpn. J. Farm Manag. 2004, 42, 35–40. [Google Scholar]
- Ogata, Y.; Nanseki, T.; Chomei, Y. Factor analysis of agricultural corporation managers’ consciousness of ICT cost-effectiveness. Agric. Inf. Res. 2019, 28, 1–12. [Google Scholar] [CrossRef][Green Version]


{kind=link}
| Pest-Control Machine | Purchase Price (Yen) | Service Life (Year) | Farm Work Rate (%) | Fixed Expenses (yen) | |||
|---|---|---|---|---|---|---|---|
| Depreciation | Repair | Capital Interest | Sum | ||||
| Boom sprayer | 878,064 | ||||||
| Sprayer | 2,464,000 | 7 | 100 | 352,000 | 93,139 | 86,240 | 531,379 |
| Tractor | 2,782,200 | 7 | 58 | 230,509 | 59,702 | 56,475 | 346,685 |
| RC helicopter | 11,900,000 | 7 | 100 | 1,700,000 | 4,760,000 | 416,500 | 6,876,500 |
| UAVs (incl.battery) | 1,557,227 | 7 | 100 | 222,461 | 467,168 | 54,503 | 744,132 |
| Pest-Control Sprayer | Pesticides Cost | Fuel Cost | Labor Cost | Sum |
|---|---|---|---|---|
| Boom sprayer | 46,369 | 265 | 898 | 47,532 |
| RC helicopter | 46,369 | 96 | 1490 | 47,955 |
| UAVs | 46,369 | 9 | 1214 | 47,592 |
| Area (ha) | Boom Sprayers (yen) | RC Helicopters (yen) | UAVs (yen) |
|---|---|---|---|
| 0.5 | 1,780,826 | 13,777,909 | 1,512,992 |
| 1 | 925,597 | 6,924,455 | 791,724 |
| 3 | 412,558 | 2,413,306 | 368,094 |
| 5 | 397,855 | 1,599,658 | 371,369 |
| 10 | 447,934 | 1,052,008 | 435,141 |
| 15 | 618,120 | 1,024,362 | 610,091 |
| 30 | 1,196,254 | 1,408,894 | 1,193,590 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, Y.; Umeda, S. Evaluating Farm Management Performance by the Choice of Pest-Control Sprayers in Rice Farming in Japan. Sustainability 2021, 13, 2618. https://doi.org/10.3390/su13052618
Seo Y, Umeda S. Evaluating Farm Management Performance by the Choice of Pest-Control Sprayers in Rice Farming in Japan. Sustainability. 2021; 13(5):2618. https://doi.org/10.3390/su13052618
Chicago/Turabian StyleSeo, Yuna, and Shotaro Umeda. 2021. "Evaluating Farm Management Performance by the Choice of Pest-Control Sprayers in Rice Farming in Japan" Sustainability 13, no. 5: 2618. https://doi.org/10.3390/su13052618
APA StyleSeo, Y., & Umeda, S. (2021). Evaluating Farm Management Performance by the Choice of Pest-Control Sprayers in Rice Farming in Japan. Sustainability, 13(5), 2618. https://doi.org/10.3390/su13052618