
Multi-Attributes Decision-Making for CDO Trajectory Planning in a Novel Terminal Airspace


Abstract
1. Introduction
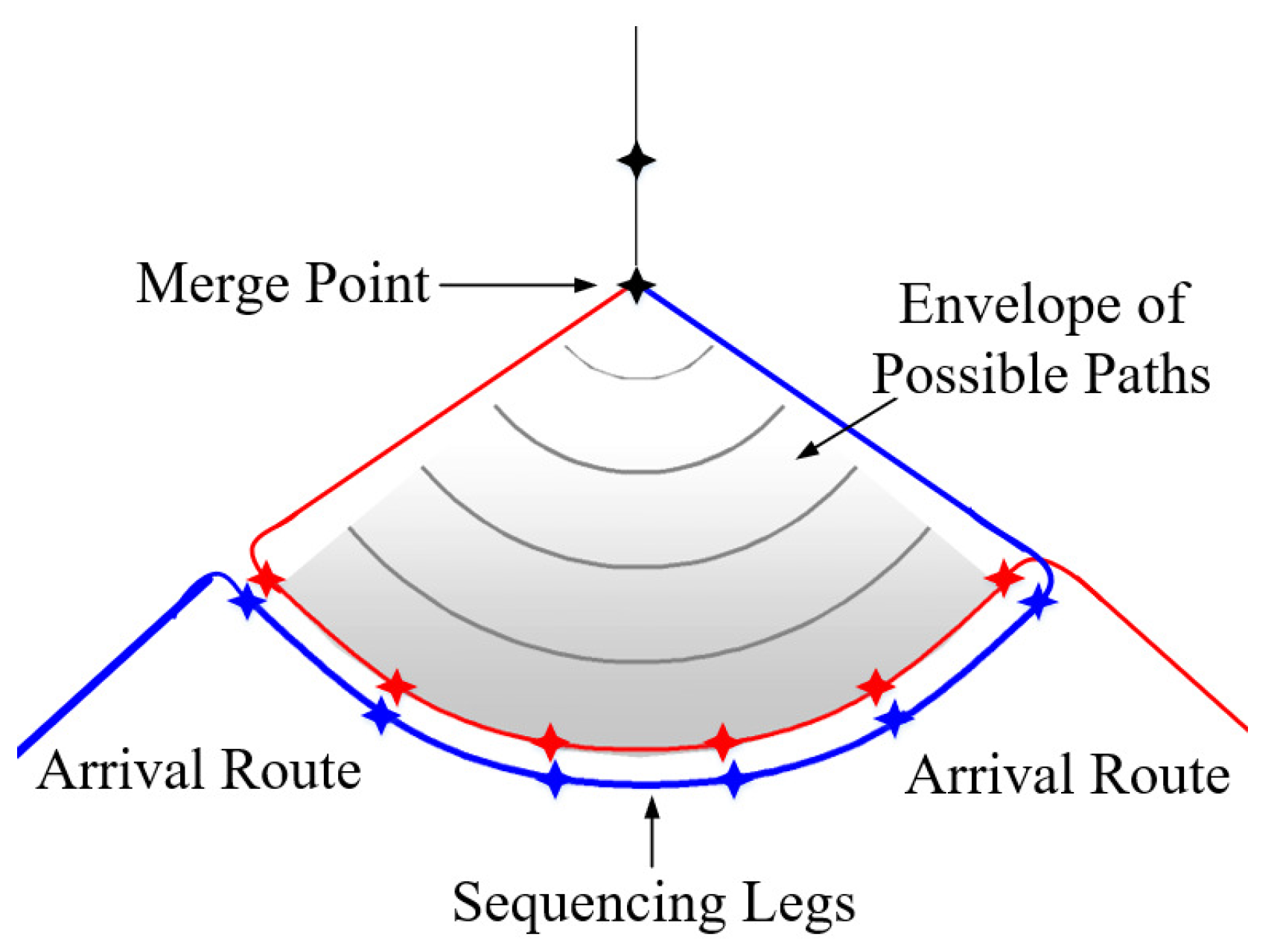
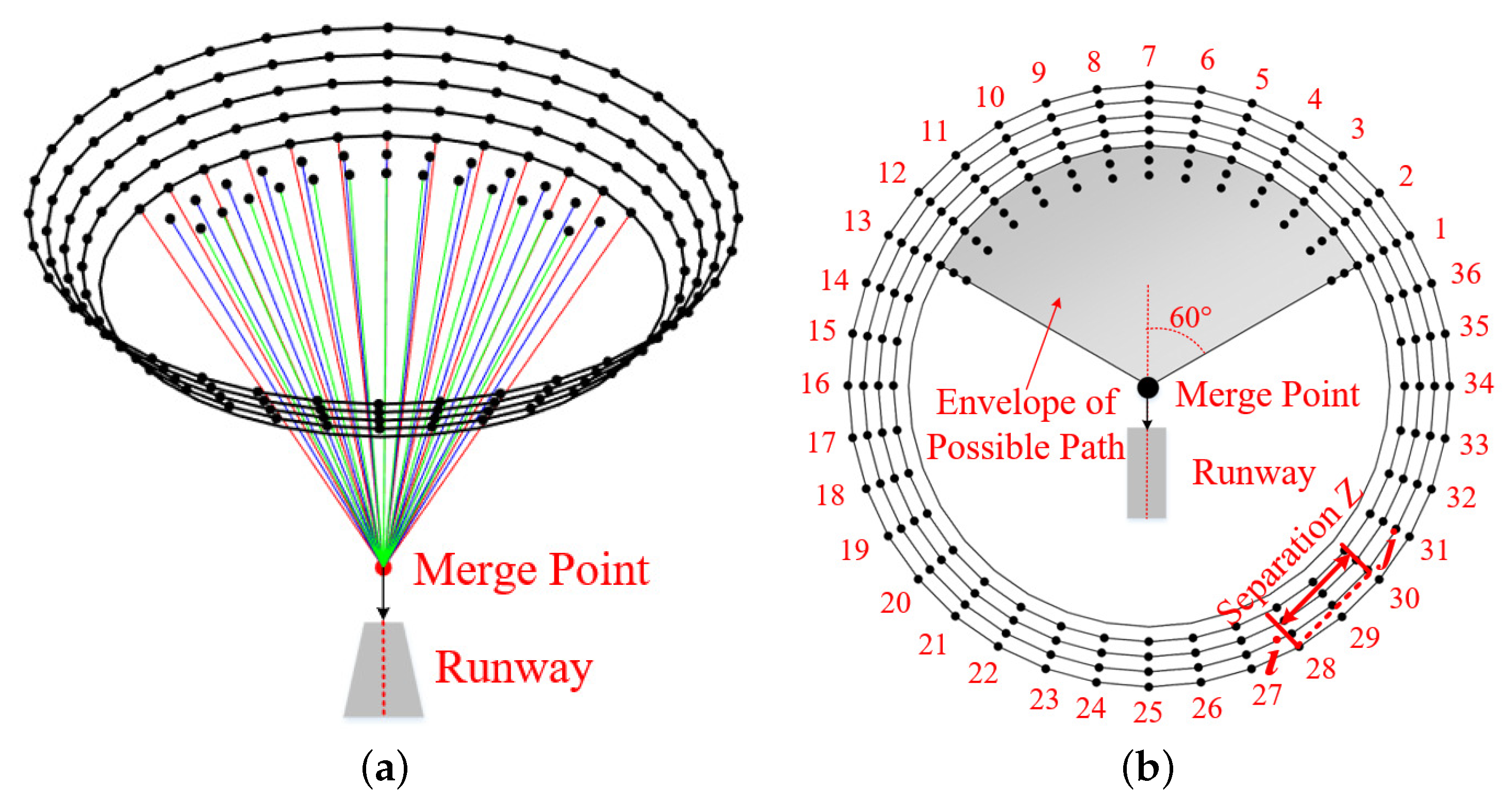
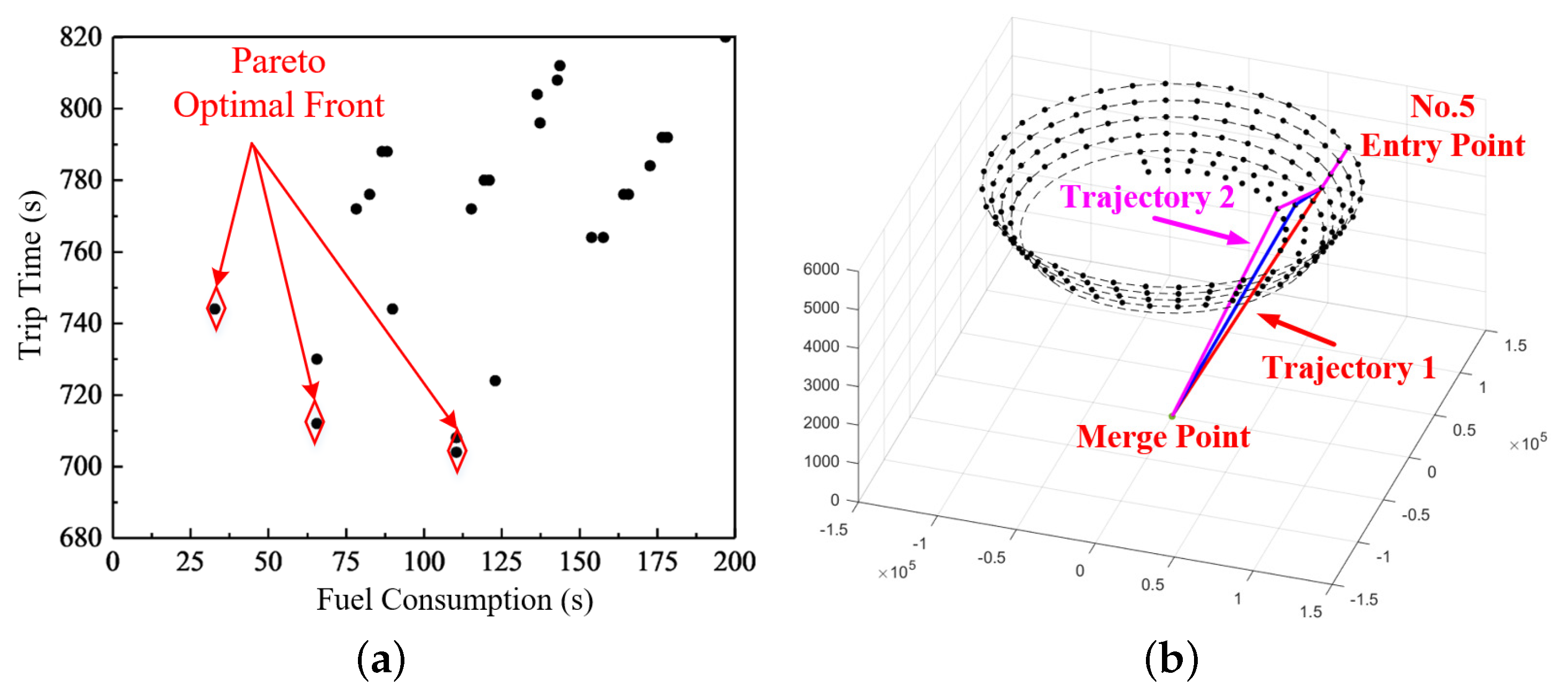
- The design of ICSAA with intuitional operation modes: In order to increase the elasticity of traditional STAR, and the capacity of sequencing legs in the PMS, a flexible terminal airspace called ICSAA was designed to merge traffic streams from all the directions and accommodate more aircraft using circular design. Based on ICSAA, two concise and intuitive operation modes: Mode H and Mode V, were designed to ensure the predictability, safety, and transparency of automated CDO operations.
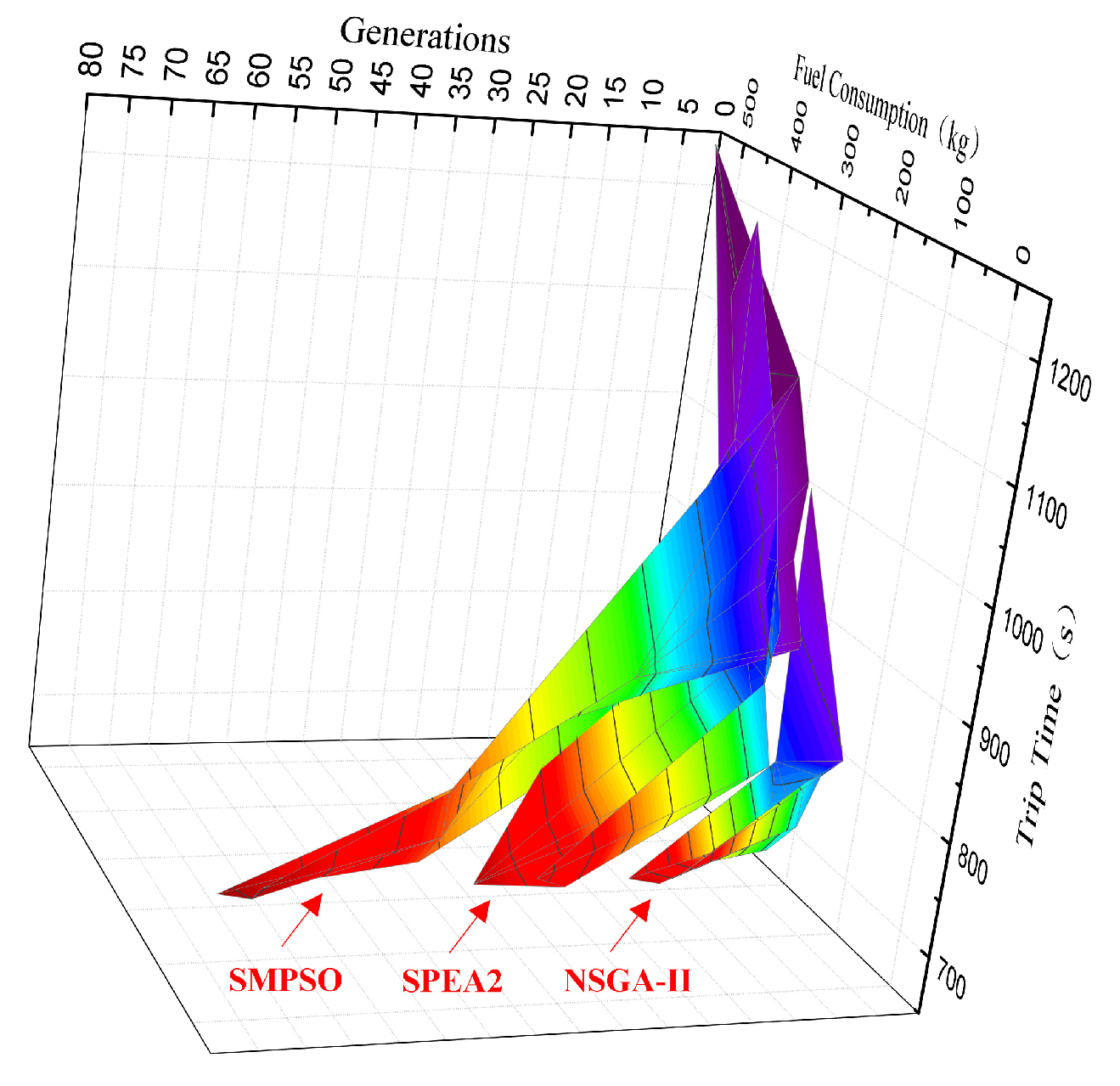
- Pareto optimal front generation for Conflict-free CDO trajectories in the ICSAA: Inside the ICSAA, a multi-objective optimization model that aims at generating conflict-free CDO trajectories with minimal fuel consumption and trip time is proposed by simulating flight dynamics. By comparing with some state-of-the-art multi-objective algorithms, the Non-dominated Sorting Genetic Algorithm with Elitist Strategy (NSGA-II) shows its best performance in convergence near the true Pareto optimal front efficiently, thus is selected to solve the proposed optimization problem.
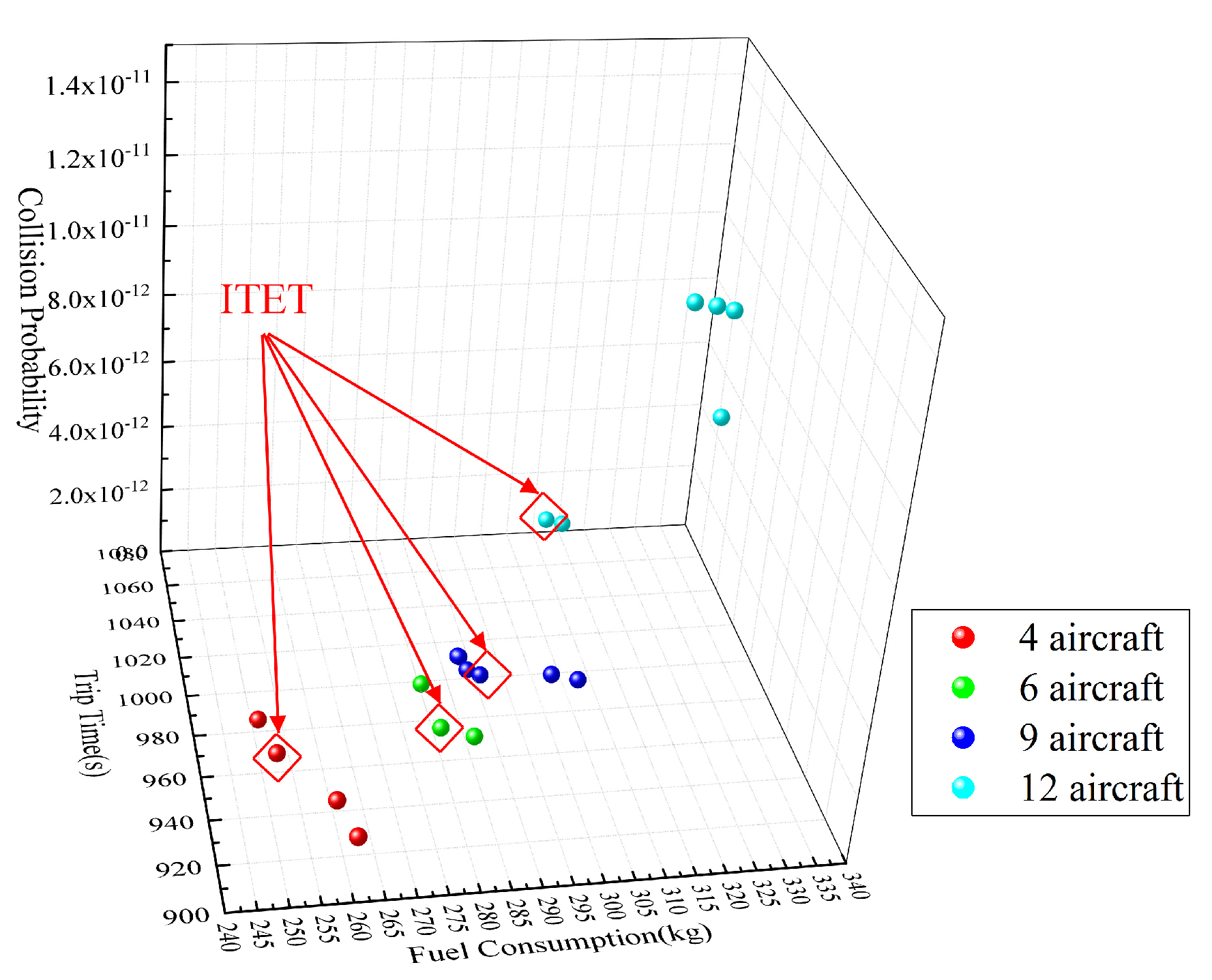
- Multi-attribute decision-making for optimal CDO trajectories selection: In order to select the optimal trajectories among the Pareto optimal front, from the perspective of both pilots’ and controllers’ preferences, we additionally take collision risk as an attribute besides fuel consumption and trip time. The entropy-based TOPSIS method is adopted to select an unique solution by multi-attribute decision-making strategies. To validate the proposed model and algorithm, the overall performance in single-aircraft, low-density and high-density scenarios are investigated. The results verified that proposed automated CDO trajectory planning in the ICSAA are of high efficiency and strike a better trade-off in terms of economy, efficiency, and safety.
2. The Novel CDO Airspace Design
2.1. Basic Structure of the Inverted Crown-Shaped Arrival Airspace
2.2. The Operational Procedure
3. Problem Definition
4. Aircraft Performance Model
5. Fuel Consumption Model
6. Optimization Function Formulation
6.1. Decision Variables
6.2. Objectives
6.3. Constraints
- Uniqueness ConstraintsThe trajectory of aircraft should be unique and definite, that is, for any vertex along a trajectory, one and only one following waypoint directly connects to it.
- Descent ConstraintsIn order to assure that aircraft could descend level by level, thus, the sum of in the each level should be equal to or greater than 1.
- Connection ConstraintsThe trajectory of each aircraft should be in compliance with operation mode of ICSAA mentioned above. The edge along the planned trajectory shall satisfy that
- Acceleration RateThe accelerate rate is a value that relates to the performance of aircraft. In general, in view of the comfort for passengers, the accelerate rate could not be too large. The BADA manual recommends a maximum longitudinal acceleration:
- Final Approach SpeedWhen aircraft start to land, the velocity should be decreased to intercept the glide slope. But there is a minimum speed limit. The minimum landing speed is now determined as follows:where 1.3 is a factor recommended by the BADA manual for all aircraft operations, is the stall speed at the reference mass , and m is the simulated aircraft mass which is updated with fuel consumption.
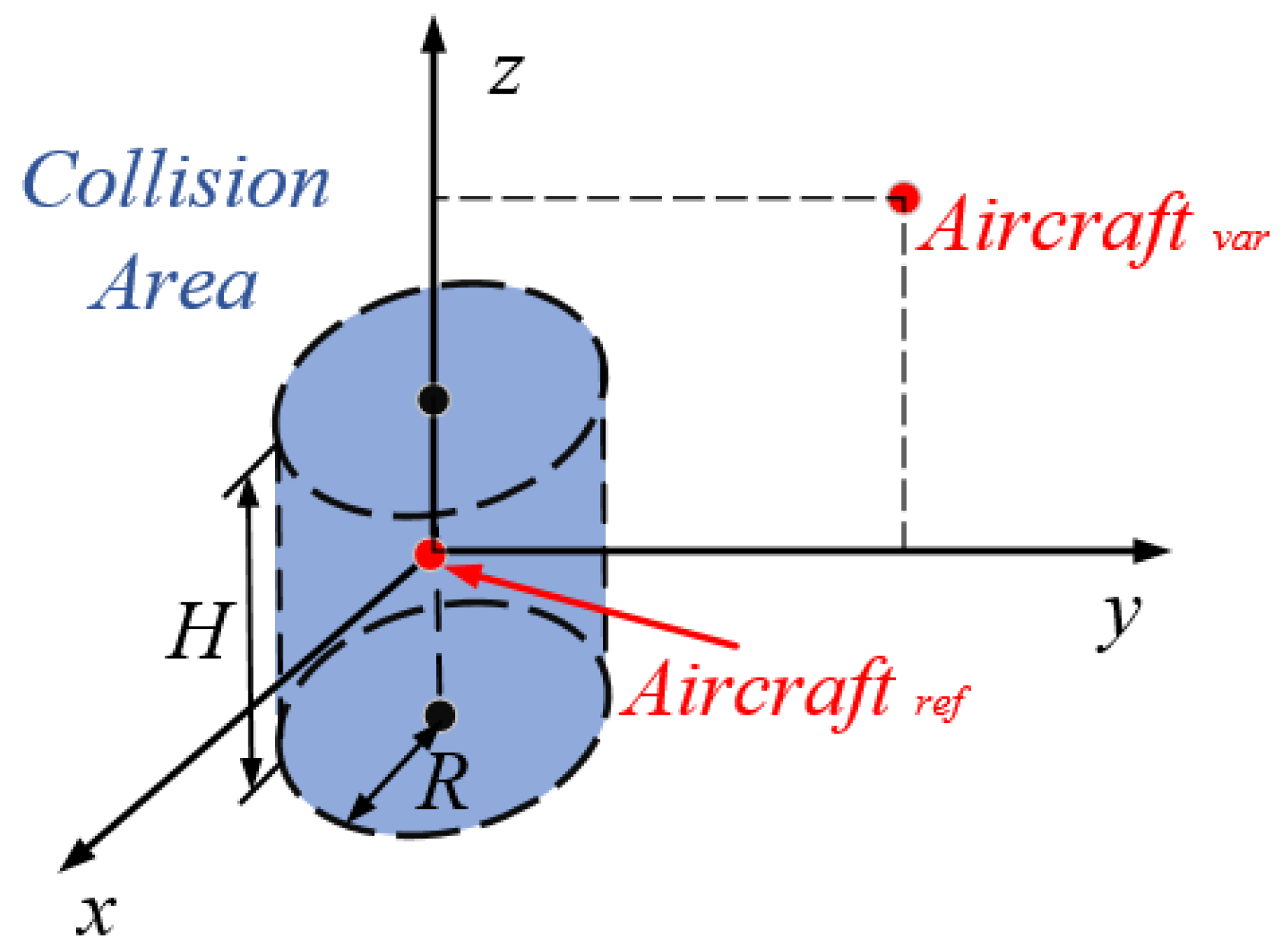
- Safety SeparationsIn order to assure safety, the separation between aircraft shall be larger than the minimum. The position of aircraft and aircraft at time t could be obtained with the Equation (7), then we could get the horizontal separation at time t, , the vertical separation . According to regulation, two aircraft are considered to be in a conflict if their horizontal separation is less than 10 km and vertical separation is less than 300 m. Therefore, during approach, should always be 1.
6.4. Solution Algorithm for Generating Pareto Optimal Front
- Coding and Decoding SchemaConsidering the integrity and accuracy of trajectory planning, we will code all the directed edges of ICSAA, (i.e., ), with binary coding schema. Thus, for one aircraft, the chromosome composed of decision variables is denoted as , while, in the multi-aircraft scenario, the chromosome is the splicing of chromosome for the each aircraft, that is, , where F and are the fitness of the individual, defined as the reciprocal of objective functions, and r and are the rank and crowding distance, respectively, which can be calculated based on Non-Dominated Sort introduced in the following part. Based on above coding schema, we can easily decode the chromosome into a trajectory of aircraft .
- Initial PopulationInitial population is the starting state of iteration for heuristic algorithm, which has a great effect on optimized results and computational efficiency. In the single aircraft scenario, the trajectory is optimized with a randomly generated initial population, while, in the multi-aircraft scenario, the initial population is generated by randomly combining the non-determined solutions derived in the single aircraft scenario.
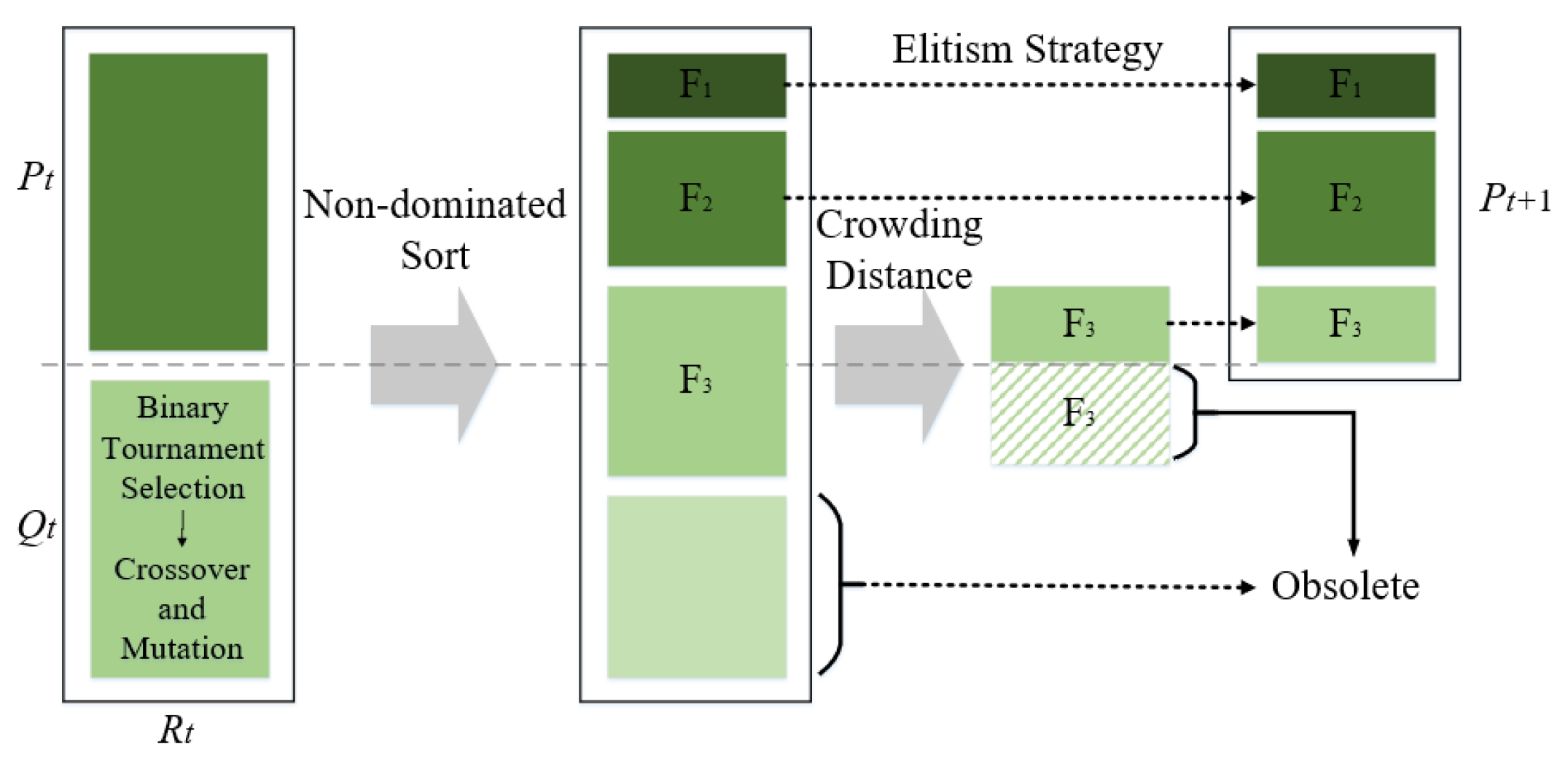
- Non-Dominated Sort and Crowding DistanceEach chromosome of the NSGA-II corresponds to a feasible solution, by which we could get the trajectory of the aircraft inside the ICSAA through decoding. The population, composed of multiple chromosomes, is the set of feasible solutions. Based on the objective function, we could get the value of fuel consumption and trip time for each solution, as well as the fitness of the chromosomes. In order to achieve faster convergence, each population can be layered and sorted to create multiple Pareto fronts with different rankings based on fitness. Solutions with lower rankings (higher fitness) are preferred. If any two solutions belong to the same front, then the solution located in a less crowded region is regarded as a better one, by introducing crowding distance mechanism to improve diversity of the population. Obviously, solutions with larger crowding distance imply that there would be probably more unexplored solution space around them. Determined by aforementioned non-domination sort and crowding distance, the identified prospective individuals will be moved to the front of population and used to generate the next generation.
- Genetic OperationsIn this research, the elite individual is selected with binary tournament selection and elitism strategy to create the offspring with crossover and mutation. To be specific, the crossover operator is implemented pairwise. The basic unit of crossover is the gene fragment, which could represent an entire trajectory of the aircraft. Suppose we pick out two individuals and in the current population randomly; then, two new individuals will be generated in the following way:where is a random integer between 1 and n. The above crossover operation is triggered by a crossover probability.Mutation is operated in a simple and intuitive way. For each of individuals, once the random number is greater than the mutation probability that we set beforehand, the individual starts to mutate at a selected gene randomly. After the mutation process, if the individual does not satisfy the constraints mentioned above, the fitness of the individual will be set to 0 and the individual would be rejected automatically during solution. After the process of crossover and mutation, combine the newly generated population and parent population, and calculate fitness value of each chromosome. Use elite strategy to keep the better chromosome to generate a new population.
- Termination ConditionsBy setting the maximum number of iteration and test the convergence results of each generation population, we could terminate the heuristic algorithm. In this article, if the number of elements in the Pareto front account for 80 percent or greater, of the population size, the heuristic algorithm terminated. Otherwise, the algorithm could terminate when reaching the maximum number of iterations.
7. Optimal Trajectory Election Using Multi-Attribute Decision Making (OTE-MADM)
7.1. Attributes
- The position error of aircraft satisfies the Gauss distribution.
- The co-variance matrices of aircraft positions are not related. For each pair, the position error of the reference aircraft is , while the position error of the intruder is , and the relative position error of them is . Based on position error, the co-variance matrix of the relative random error of two aircraft is expressed as a diagonal matrix:
7.2. Entropy-Weights Method
7.3. TOPSIS Method
- Normalize the decision matrix. Given that all the attributes of each solution, i.e., fuel consumption, trip time, and collision probability, are cost attributes in the MADM problems, we introduce the following formulas [41] to normalize each attribute value in decision matrix into a corresponding element : .
- Calculate the weighted normalized decision matrix. Suppose that weights of attributes, , is obtained with Equation (28), where , , we can construct the weighted normalized decision matrix as
- Determine the positive and negative ideal solutions. The Positive Ideal Solution (PIS) and the Negative Ideal Solution (NIS) are determined, respectively, as follows:where , and .
- Measure the distance from each solution to PIS and NIS. The separation, and , are given as:
- Calculate the closeness coefficient to the ideal solutions. The closeness coefficient of the solution in the Pareto optimal front with respect to the ideal solutions, , is defined as:
- Rank the preference order. The solutions of the Pareto optimal front can be ranked according to the descending order of ; the larger means the better solution.
8. Numerical Tests
8.1. Parameter Setting
8.2. Algorithm Comparison
8.3. Single Aircraft Scenario
8.4. Multi-Aircraft Scenario
8.4.1. Simultaneous Arrival
8.4.2. Continuous Approach
9. Conclusions and Future Work
- The ICSAA was designed based on an artificial airspace irrespective to terrain, obstacles, noise abatement, airspace restriction and runway configurations, etc. The very essential work is to adapt the ICSAA to a real airport and thoroughly validate the effectiveness by both fast-time simulations and Human-In-The-Loop (HITL) experiments.
- Aircraft positioning error was considered in trajectory selection in this paper. However, more realistic uncertain factors, like flight control error, meteorological conditions, stochastic runway scheduling, etc., shall also be included in robust CDO trajectory planning and implementation.
- Human-machine system is another emerging topic in future autonomous ATM. The decision-making by machine shall be transparent and understandable, which allows air traffic controllers and pilots to take over automated equipment at any time safely. It means the cognition of human and machine needs to be strongly synchronized [42]. For automated CDO trajectory planning and negotiation in flexible airspace, designing transparent Decision Support System (DSS) based on explainable Artificial Intelligence(AI) would be an indispensable approach to enhance human cognition, operational efficiency, and safety, especially for a high-density traffic scenario.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ATC | Air Traffic Control |
| ATCo | Air Traffic Controller |
| ATM | Air Traffic Management |
| BADA | Base of Aircraft Data |
| CDO | Continuous Descent Operation |
| ICAO | International Civil Aviation Organization |
| ICSAA | Inverted Crown-Shaped Arrival Airspace |
| NextGen | Next Generation Air Transportation System |
| NSGA-II | Non-dominated Sorting Genetic Algorithm with Elitist Strategy |
| NLP | Non-Linear Programming |
| PM | Point Merge |
| PMM | Point Mass Model |
| SESAR | Single European Sky ATM Research |
| STAR | Standard Terminal Arrival Route |
| TOPSIS | Technique for Order Preference by Similarity to an Ideal Solution |
| TSFC | Thrust Specific Consumption Model |
| TEM | Total-Energy Model |
| EWM | Entropy Weight Method |
| DSS | Decision Support Systems |
References
- Sáez, R.; Prats, X.; Polishchuk, T.; Polishchuk, V.; Schmidt, C. Automation for Separation with Continuous Descent Operations: Dynamic Aircraft Arrival Routes. J. Air Transp. 2020, 28, 1–11. [Google Scholar] [CrossRef]
- Sun, M.; Rand, K.; Fleming, C. 4 Dimensional waypoint generation for conflict-free trajectory based operation. Aerosp. Sci. Technol. 2019, 88, 350–361. [Google Scholar] [CrossRef]
- Clarke, J.P.B.; Ho, N.T.; Ren, L.; Brown, J.A.; Elmer, K.R.; Tong, K.O.; Wat, J.K. Continuous descent approach: Design and flight test for Louisville Inter-national Airport. J. Aircr. 2004, 41, 1054–1066. [Google Scholar] [CrossRef]
- SheHRESTA, S.; Neskovic, D.; Williams, S.S. Analysis of continuous descent benefits and impacts during daytime operations. In Proceedings of the 8th USA/Europe Air Traffic Management Research and Development Seminar (ATM2009), Napa, CA, USA, 29 June–2 July 2009. [Google Scholar]
- ICAO. Continuous Descent Operations (CDO) Manual; International Civil Aviation Organization: Montréal, QC, Canada, 2010. [Google Scholar]
- Jin, L.; Cao, Y.; Sun, D. Investigation of potential fuel savings due to continuous-descent approach. J. Aircr. 2013, 50, 807–816. [Google Scholar] [CrossRef]
- Turgut, E.T.; Usanmaz, O.; Cavcar, M.; Dogeroglu, T.; Armutlu, K. Effects of Descent Flight-Path Angle on Fuel Consumption of Commercial Aircraft. J. Aircr. 2018, 56, 313–323. [Google Scholar] [CrossRef]
- Fricke, H.; Seiß, C.; Herrmann, R. Fuel and energy benchmark analysis of continuous descent operations. Air Traffic Control. Q. 2015, 23, 83–108. [Google Scholar] [CrossRef]
- Andreeva-Mori, A.; Suzuki, S.; Itoh, E. Scheduling of arrival aircraft based on minimum fuel burn descents. ASEAN Eng. J. 2011, 1, 25–38. [Google Scholar]
- Enea, G.; Bronsvoort, J.; Mcdonald, G. Trade-Off between Optimal Profile Descents, Runway Throughput and Net Fuel Benefit, Preliminary Discussion and Results. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 4486. [Google Scholar]
- Park, S.G.; Clarke, J.P. Optimal control based vertical trajectory determination for continuous descent arrival procedures. J. Aircr. 2015, 52, 1469–1480. [Google Scholar] [CrossRef]
- Jia, Y.; Cai, K. The Trade-off Between Trajectory Predictability and Potential Fuel Savings for Continuous Descent Operations. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–6. [Google Scholar]
- Murrieta-Mendoza, A.; Ruiz, H.; Botez, R.M.; Supérieure, T. Vertical reference flight trajectory optimization with the particle swarm optimisation. In Proceedings of the 36th IASTED International Conference on Modelling, Identification and Control (MIC 2017), Innsbrunck, Austria, 20–21 February 2017. [Google Scholar]
- Samà, M.; D’Ariano, A.; Palagachev, K.; Gerdts, M. Integration methods for aircraft scheduling and trajectory optimization at a busy terminal manoeuvring area. OR Spectr. 2019, 41, 641–681. [Google Scholar] [CrossRef]
- Tian, Y.; He, X.; Xu, Y.; Wan, L.; Ye, B. 4D Trajectory Optimization of Commercial Flight for Green Civil Aviation. IEEE Access 2020, 8, 62815–62829. [Google Scholar] [CrossRef]
- Zhang, M.; Filippone, A.; Bojdo, N. Using Trajectory Optimization to Minimize Aircraft Noise Impact. INTER-NOISE and NOISE-CON Congress and Conference Proceedings. Inst. Noise Control Eng. 2017, 255, 4003–4013. [Google Scholar]
- Rosenow, J.; Förster, S.; Lindner, M.; Fricke, H. Multicriteria-Optimized Trajectories Impacting Today’s Air Traffic Density, Efficiency, and Environmental Compatibility. J. Air Transp. 2019, 27, 8–15. [Google Scholar] [CrossRef]
- Dalmau, R.; Prats, X.; Baxley, B. Fast sensitivity-based optimal trajectory updates for descent operations subject to time constraints. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar]
- Seenivasan, D.B.; Olivares, A.; Staffetti, E. Multi-aircraft optimal 4D online trajectory planning in the presence of a multi-cell storm in development. Transp. Res. Part C Emerg. Technol. 2020, 110, 123–142. [Google Scholar] [CrossRef]
- Kendall, A.P.; Clarke, J.P. Stochastic Optimization of Area Navigation Noise Abatement Arrival and Approach Procedures. J. Guid. Control Dyn. 2020, 43, 863–869. [Google Scholar] [CrossRef]
- Alam, S.; Nguyen, M.H.; Abbass, H.A.; Lokan, C. Multi-aircraft dynamic continuous descent approach methodology for low-noise and emission guidance. J. Aircr. 2011, 48, 1225–1237. [Google Scholar] [CrossRef]
- Favennec, B.; Symmans, T.; Houlihan, D.; Vergne, K.; Zeghal, K. Point Merge Integration of Arrival Flows Enabling Extensive RNAV Application and Continuous Descent–Operational Services and Environment Definition. 2010. Available online: https://www.eurocontrol.int/sites/default/files/2019-06/point-merge-osed-v2.0-2010_1.pdf (accessed on 26 January 2021).
- Errico, A.; Di Vito, V. Aircraft operating technique for efficient sequencing arrival enabling environmental benefits through CDO in TMA. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1363. [Google Scholar]
- Hong, Y.; Choi, B.; Lee, K.; Kim, Y. Dynamic robust sequencing and scheduling under uncertainty for the point merge system in terminal airspace. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2933–2943. [Google Scholar] [CrossRef]
- Glover, W.; Lygeros, J. A multi-aircraft model for conflict detection and resolution algorithm evaluation. HYBRIDGE Deliv. D 2004, 1, 3. [Google Scholar]
- Center, E.E. User Manual for the Base of Aircraft Data (BADA); Revision 3.11; EEC Note: Belgium, 2013; Available online: https://www.eurocontrol.int/publication/user-manual-base-aircraft-data-bada (accessed on 26 January 2021).
- Seenivasan, D.B.; Olivares, A.; Staffetti, E. Optimal 4D Trajectory Planning for Multiple Aircraft in Continuous Descent Operations. In Proceedings of the 8th European Conference for Aeronautics and Aerospace Science (EUCASS), Madrid, Spain, 1–4 July 2019; Available online: https://www.eucass.eu/doi/EUCASS2019-0544.pdf (accessed on 26 January 2021).
- Filippone, A. Aircraft noise prediction. Prog. Aerosp. Sci. 2014, 68, 27–63. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Yu, X.; Lu, Y.Q.; Yu, X. Evaluating Multi-objective Evolutionary Algorithms Using MCDM Methods. IEEE Math. Probl. Eng. 2018, 2018, 1–14. [Google Scholar]
- Wątróbski, J.; Jankowski, J.; Ziemba, P.; Karczmarczyk, A.; Zioło, M. Generalised framework for multi-criteria method selection. Omega 2019, 86, 107–124. [Google Scholar] [CrossRef]
- Dos Santos, B.M.; Godoy, L.P.; Campos, L.M.S. Performance evaluation of green suppliers using entropy-TOPSIS-F. J. Clean. Prod. 2019, 207, 498–509. [Google Scholar] [CrossRef]
- Wu, Z.; Li, J.; Zuo, J.; Li, S. Path planning of UAVs based on collision probability and Kalman filter. IEEE Access 2018, 6, 34237–34245. [Google Scholar] [CrossRef]
- Zou, Z.; Yun, Y.; Sun, J. Entropy method for determination of weight of evaluating indicators in fuzzy synthetic evaluation for water quality assessment. J. Environ. Sci. 2006, 18, 1020–1023. [Google Scholar] [CrossRef]
- Taheriyoun, M.; Karamouz, M.; Baghv, A. Development of an entropy-based fuzzy eutrophication index for reservoir water quality evaluation. Iran. J. Environ. Health Sci. Eng. 2010, 7, 1–14. [Google Scholar]
- Kumar, R.; Singh, S.; Bilga, P.S.; Jatin, K.; Singh, J.; Singh, S.; Scutaru, S.-M.; Pruncu, C.I. Revealing the Benefits of Entropy Weights Method for Multi-Objective Optimization in Machining Operations: A Critical Review. J. Mater. Res. Technol. 2021, 10, 1471–1492. [Google Scholar] [CrossRef]
- Zhu, Y.; Tian, D.; Yan, F. Effectiveness of Entropy Weight Method in Decision-Making. Math. Probl. Eng. 2020, 2020, 1–5. [Google Scholar] [CrossRef]
- Sałabun, W. The mean error estimation of TOPSIS method using a fuzzy reference models. J. Theor. Appl. Comput. Sci. 2013, 7, 40–50. [Google Scholar]
- Sałabun, W.; Wątróbski, J.; Shekhovtsov, J. Are MCDA Methods Benchmarkable? A Comparative Study of TOPSIS, VIKOR, COPRAS, and PROMETHEE II Methods. Symmetry 2020, 12, 1549. [Google Scholar] [CrossRef]
- Chen, P. Effects of normalization on the entropy-based TOPSIS method. Expert Syst. Appl. 2019, 136, 33–41. [Google Scholar] [CrossRef]
- Hwang, C.L.; Yoon, K.P. Multiple Attribute Decision Making: Methods and Applications; Springer: New York, NY, USA, 1981. [Google Scholar]
- Sáez Nieto, F.J. The long journey toward a higher level of automation in ATM as safety critical, sociotechnical and multi-Agent system. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1533–1547. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Parameter | Value |
|---|---|
| reference mass (kg) | 64,000 |
| surface area of wing (m2) | 122.6 |
| 0.6333 | |
| 859.03 | |
| 0.95423 |
| 1 Aircraft | 6 Aircraft | 12 Aircraft | |||||||
|---|---|---|---|---|---|---|---|---|---|
| NSGA-II | SPEA2 | SMPSO | NSGA-II | SPEA2 | SMPSO | NSGA-II | SPEA2 | SMPSO | |
| GD | 0.0104 | 0.0150 | 0.0159 | 0.0255 | 0.026 | 0.0259 | 0.0412 | 0.0533 | 0.0483 |
| IGD | 0.1385 | 0.1994 | 0.4233 | 0.1787 | 0.2307 | 0.5237 | 0.2136 | 0.2593 | 0.4233 |
| HV | 1.1810 | 1.0192 | 0.9999 | 1.4517 | 1.0353 | 1.2359 | 1.8325 | 1.2543 | 1.5786 |
| Spacing | 0.0694 | 0.0758 | 0.0828 | 0.0746 | 0.0784 | 0.0988 | 0.0743 | 0.0824 | 0.0988 |
| MPFE | 1.2274 | 1.4045 | 1.4019 | 1.5743 | 1.639 | 1.6319 | 1.6432 | 1.9043 | 1.8377 |
| EP | OTFC | OTTT | ITET | ||||||
|---|---|---|---|---|---|---|---|---|---|
| FC | TT | Trajectory | FC | TT | Trajectory | FC | TT | Trajectory | |
| 1 | 32.8 | 744 | 1-1-1-1 | 110.4 | 704 | 1-1-1-27 | 32.8 | 744 | 1-1-1-1 |
| 2 | 32.8 | 744 | 2-2-2-2 | 110.4 | 704 | 2-2-2-28 | 32.8 | 744 | 2-2-2-2 |
| 3 | 32.8 | 744 | 3-3-3-3 | 110.4 | 704 | 3-3-3-29 | 32.8 | 744 | 3-3-3-3 |
| 4 | 32.8 | 744 | 4-4-4-4 | 110.4 | 704 | 4-4-4-30 | 32.8 | 744 | 4-4-4-4 |
| 5 | 32.8 | 744 | 5-5-5-5 | 110.4 | 704 | 5-5-5-31 | 32.8 | 744 | 5-5-5-5 |
| 6 | 32.8 | 744 | 6-6-6-6 | 110.4 | 704 | 6-6-6-32 | 32.8 | 744 | 6-6-6-6 |
| 7 | 32.8 | 744 | 7-7-7-7 | 110.4 | 704 | 7-7-7-33 | 32.8 | 744 | 7-7-7-7 |
| 8 | 32.8 | 744 | 8-8-8-8 | 110.4 | 704 | 8-8-8-34 | 32.8 | 744 | 8-8-8-8 |
| 9 | 32.8 | 744 | 9-9-9-9 | 110.4 | 704 | 9-9-9-35 | 32.8 | 744 | 9-9-9-9 |
| 10 | 32.8 | 744 | 10-10-10-10 | 110.4 | 704 | 10-10-10-36 | 32.8 | 744 | 10-10-10-10 |
| 11 | 32.8 | 744 | 11-11-11-11 | 110.4 | 704 | 11-11-11-37 | 32.8 | 744 | 11-11-11-11 |
| 12 | 32.8 | 744 | 12-12-12-12 | 110.4 | 704 | 12-12-12-38 | 32.8 | 744 | 12-12-12-12 |
| 13 | 32.8 | 744 | 13-13-13-13 | 110.4 | 704 | 13-13-13-39 | 32.8 | 744 | 13-13-13-13 |
| 14 | 78.3 | 800 | 14-14-14-13 | 122.9 | 720 | 14-14-14-39 | 78.3 | 800 | 14-14-14-13 |
| 15 | 128.3 | 856 | 15-15-14-13 | 153.9 | 760 | 15-15-15-39 | 136.44 | 812 | 15-15-15-26 |
| 16 | 182.1 | 924 | 16-16-14-13 | 196.9 | 816 | 16-16-16-39 | 196.9 | 816 | 16-16-16-39 |
| 17 | 237.6 | 992 | 16-15-14-13 | 247 | 872 | 17-17-16-39 | 247 | 872 | 17-17-16-39 |
| 18 | 292.8 | 1008 | 18-17-16-26 | 300.7 | 994 | 18-17-16-39 | 300.7 | 994 | 18-17-16-39 |
| 19 | 348.4 | 1076 | 18-17-16-26 | 356.1 | 1008 | 18-17-16-39 | 356.1 | 1008 | 18-17-16-39 |
| 20 | 414.5 | 1160 | 19-18-16-26 | 422.2 | 1092 | 19-18-16-39 | 422.2 | 1092 | 19-18-16-39 |
| 21 | 477.8 | 1240 | 20-19-16-26 | 485.5 | 1172 | 20-19-16-39 | 485.5 | 1172 | 20-19-16-39 |
| 22 | 545.6 | 1324 | 21-19-16-26 | 553.2 | 1256 | 21-19-16-39 | 553.2 | 1256 | 21-19-16-39 |
| 23 | 615.4 | 1412 | 22-19-16-26 | 623 | 1344 | 22-19-16-39 | 623 | 1344 | 22-19-16-39 |
| 24 | 688.8 | 1504 | 22-19-16-26 | 696.3 | 1436 | 22-19-16-39 | 696.3 | 1436 | 22-19-16-39 |
| 25 | 751.5 | 1588 | 26-28-31-14 | 759 | 1520 | 26-28-31-27 | 759 | 1520 | 26-28-31-27 |
| 26 | 682.9 | 1500 | 27-29-32-14 | 690.4 | 1432 | 27-29-32-27 | 690.4 | 1432 | 27-29-32-27 |
| 27 | 614.2 | 1412 | 28-30-33-14 | 621.8 | 1344 | 28-30-33-27 | 621.8 | 1344 | 28-30-33-27 |
| 28 | 545.6 | 1324 | 29-31-34-14 | 553.2 | 1256 | 29-31-34-27 | 553.2 | 1256 | 29-31-34-27 |
| 29 | 477.8 | 1240 | 30-31-34-14 | 485.5 | 1172 | 30-31-34-27 | 485.5 | 1172 | 30-31-34-27 |
| 30 | 414.5 | 1160 | 31-32-34-14 | 422.2 | 1092 | 31-32-34-27 | 422.2 | 1092 | 31-32-34-27 |
| 31 | 348.4 | 1076 | 32-33-34-14 | 356.1 | 1008 | 32-33-34-27 | 356.1 | 1008 | 32-33-34-27 |
| 32 | 292.8 | 1008 | 32-33-34-14 | 300.7 | 944 | 32-33-34-27 | 300.7 | 944 | 32-33-34-27 |
| 33 | 237.6 | 992 | 34-35-36-1 | 247 | 872 | 33-33-34-27 | 247 | 872 | 33-33-34-27 |
| 34 | 182.1 | 924 | 34-35-36-1 | 196.9 | 816 | 34-34-34-27 | 196.9 | 816 | 34-34-34-27 |
| 35 | 128.3 | 856 | 35-35-36-1 | 153.9 | 760 | 35-35-35-27 | 136.44 | 812 | 35-35-35-14 |
| 36 | 78.3 | 800 | 36-36-36-1 | 122.9 | 720 | 36-36-36-27 | 78.3 | 800 | 36-36-36-1 |
| 4 Aircraft | 6 Aircraft | |||||
|---|---|---|---|---|---|---|
| OTFC | OTTT | ITET | OTFC | OTTT | ITET | |
| Total fuel consumption (kg) | 1004.9 | 1052.5 | 1012.6 | 1682.6 | 1720.5 | 1689.3 |
| Average fuel consumption (kg) | 251.2 | 263.1 | 253.2 | 280.4 | 286.8 | 281.6 |
| Reference total fuel consumption (kg) | 974.9 | 974.9 | 974.9 | 1569.6 | 1569.6 | 1569.6 |
| Reference average fuel consumption (kg) | 243.7 | 243.7 | 243.7 | 261.6 | 261.6 | 261.6 |
| Increase (kg) | 7.5 | 19.4 | 9.4 | 18.8 | 25.2 | 20.0 |
| Increase rate (%) | 3.1 | 8.0 | 3.9 | 7.2 | 9.6 | 7.6 |
| Total trip time (s) | 3944.0 | 3712.0 | 3876.0 | 5992.0 | 5824.0 | 5856.0 |
| Average trip time (s) | 986.0 | 928.0 | 969.0 | 998.7 | 970.7 | 976.0 |
| Reference total rip time (s) | 3752.0 | 3752.0 | 3752.0 | 5768.0 | 5768.0 | 5768.0 |
| Reference average trip time (s) | 938.0 | 938.0 | 938.0 | 961.3 | 961.3 | 961.3 |
| Increase (s) | 48.0 | −10.0 | 31.0 | 37.3 | 9.3 | 14.7 |
| Increase rate (%) | 5.1 | −1.1 | 3.3 | 3.9 | 1.0 | 1.5 |
| Collision rate | 1.4 × 10−17 | 1.6 × 10−15 | 1.4 × 10−17 | 9.4 × 10−16 | 5.4 × 10−16 | 5.8 × 10−17 |
| 9 Aircraft | 12 Aircraft | |||||
| OTFC | OTTT | ITET | OTFC | OTTT | ITET | |
| Total fuel consumption (kg) | 2594.7 | 2755.9 | 2620.2 | 3680.2 | 3970.3 | 3680.2 |
| Average fuel consumption (kg) | 288.3 | 306.2 | 291.1 | 306.7 | 330.9 | 306.7 |
| Reference total fuel consumption (kg) | 2355.2 | 2355.2 | 2355.2 | 3135.4 | 3135.4 | 3135.4 |
| Reference average fuel consumption (kg) | 261.7 | 261.7 | 261.7 | 261.3 | 261.3 | 261.3 |
| Increase (kg) | 26.6 | 44.5 | 29.4 | 45.4 | 69.6 | 45.4 |
| Increase rate (%) | 10.2 | 17.0 | 11.3 | 17.4 | 26.6 | 17.4 |
| Total trip time (s) | 9108.0 | 8868.0 | 9012.0 | 12,512.0 | 12,140.0 | 12,512.0 |
| Average trip time (s) | 1012.0 | 985.3 | 1001.3 | 1042.7 | 1011.7 | 1042.7 |
| Reference total rip time (s) | 8584.0 | 8584.0 | 8584.0 | 11,400.0 | 11,400.0 | 11,400.0 |
| Reference average trip time (s) | 953.8 | 953.8 | 953.8 | 950.0 | 950.0 | 950.0 |
| Increase (s) | 58.2 | 31.6 | 47.6 | 92.7 | 61.7 | 92.7 |
| Increase rate (%) | 6.1 | 3.3 | 5.0 | 9.8 | 6.5 | 9.8 |
| Collision rate | 7.2 × 10−15 | 6.6 × 10−13 | 7.5 × 10−15 | 2.5 × 10−12 | 7.0 × 10−12 | 2.5 × 10−12 |
| 4 Aircraft | 8 Aircraft | |||||
|---|---|---|---|---|---|---|
| OTFC | OTTT | ITET | OTFC | OTTT | ITET | |
| Total fuel consumption (kg) | 1018.3 | 1127.2 | 1082.4 | 2075.9 | 2341.6 | 2111.2 |
| Average fuel consumption (kg) | 254.6 | 281.8 | 270.6 | 259.5 | 292.7 | 263.9 |
| Reference total fuel consumption (kg) | 974.9 | 974.9 | 974.9 | 1949.8 | 1949.8 | 1949.8 |
| Reference average fuel consumption (kg) | 243.7 | 243.7 | 243.7 | 243.7 | 243.7 | 243.7 |
| Increase (kg) | 10.9 | 38.1 | 26.9 | 15.8 | 49 | 20.2 |
| Increase rate (%) | 4.47 | 15.63 | 11.04 | 6.48 | 20.11 | 8.29 |
| Total trip time (s) | 4020 | 3824 | 3840 | 7972 | 7744 | 7872 |
| Average trip time (s) | 1005 | 956 | 960 | 996.5 | 968 | 984 |
| Reference total rip time (s) | 3752 | 3752 | 3752 | 7504 | 7504 | 7504 |
| Reference average trip time (s) | 938 | 938 | 938 | 938 | 938 | 938 |
| Increase (s) | 67 | 18 | 22 | 58.5 | 30 | 46 |
| Increase rate (%) | 7.14 | 1.92 | 2.35 | 6.24 | 3.20 | 4.90 |
| Collision rate | 2.9 × 10−14 | 1.2 × 10−18 | 1.8 × 10−18 | 6.3 × 10−13 | 1.2 × 10−15 | 7.2 × 10−15 |
| 12 Aircraft | 16 Aircraft | |||||
| OTFC | OTTT | ITET | OTFC | OTTT | ITET | |
| Total fuel consumption (kg) | 3415.5 | 3662.7 | 3585.1 | 5033.4 | 5143.8 | 5066.1 |
| Average fuel consumption (kg) | 284.6 | 305.2 | 298.8 | 314.6 | 321.5 | 316.6 |
| Reference total fuel consumption (kg) | 2924.7 | 2924.7 | 2924.7 | 3899.6 | 3899.6 | 3899.6 |
| Reference average fuel consumption (kg) | 243.7 | 243.7 | 243.7 | 243.7 | 243.7 | 243.7 |
| Increase (kg) | 40.9 | 61.5 | 55.1 | 70.9 | 77.8 | 72.9 |
| Increase rate (%) | 16.78 | 25.24 | 22.61 | 29.09 | 31.92 | 29.91 |
| Total trip time (s) | 12,248 | 11,832 | 11,872 | 16,840 | 16,776 | 16,816 |
| Average trip time (s) | 1020.7 | 986 | 989.3 | 1052.5 | 1048.5 | 1051 |
| Reference total rip time (s) | 11,256 | 11,256 | 11,256 | 15,008 | 15,008 | 15,008 |
| Reference average trip time (s) | 938 | 938 | 938 | 938 | 938 | 938 |
| Increase (s) | 82.7 | 48 | 51.3 | 114.5 | 110.5 | 113 |
| Increase rate (%) | 8.82 | 5.12 | 5.47 | 12.21 | 11.78 | 12.05 |
| Collision rate | 3.4 × 10−12 | 1.9 × 10−15 | 1.8 × 10−14 | 2.5 × 10−12 | 7.0 × 10−12 | 2.5 × 10−12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Li, W.; Wang, S.; Zhao, Z. Multi-Attributes Decision-Making for CDO Trajectory Planning in a Novel Terminal Airspace. Sustainability 2021, 13, 1354. https://doi.org/10.3390/su13031354
Yang L, Li W, Wang S, Zhao Z. Multi-Attributes Decision-Making for CDO Trajectory Planning in a Novel Terminal Airspace. Sustainability. 2021; 13(3):1354. https://doi.org/10.3390/su13031354
Chicago/Turabian StyleYang, Lei, Wenbo Li, Simin Wang, and Zheng Zhao. 2021. "Multi-Attributes Decision-Making for CDO Trajectory Planning in a Novel Terminal Airspace" Sustainability 13, no. 3: 1354. https://doi.org/10.3390/su13031354
APA StyleYang, L., Li, W., Wang, S., & Zhao, Z. (2021). Multi-Attributes Decision-Making for CDO Trajectory Planning in a Novel Terminal Airspace. Sustainability, 13(3), 1354. https://doi.org/10.3390/su13031354