
Space Thermoacoustic Radioisotopic Power System, SpaceTRIPS: The Magnetohydrodynamic Generator



Abstract
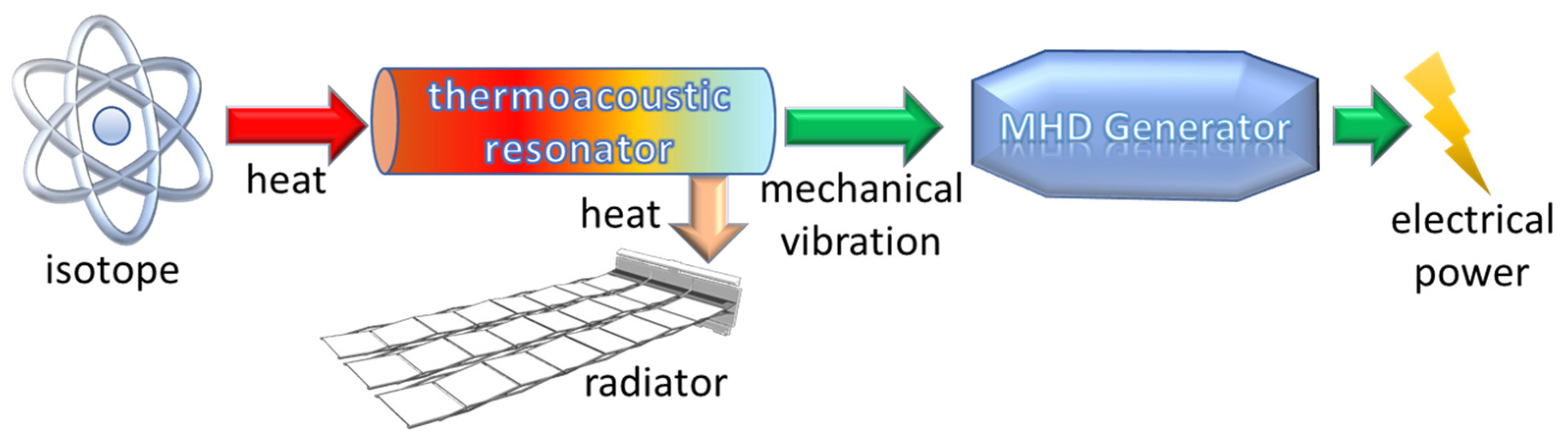
:1. Introduction
- Americium heat source.
- Thermoacoustic engine, transforming thermal into mechanical energy.
- MHD generator, transforming mechanical energy into electrical one.
- Cold source, based on the thermal radiation in space.
2. Materials and Methods
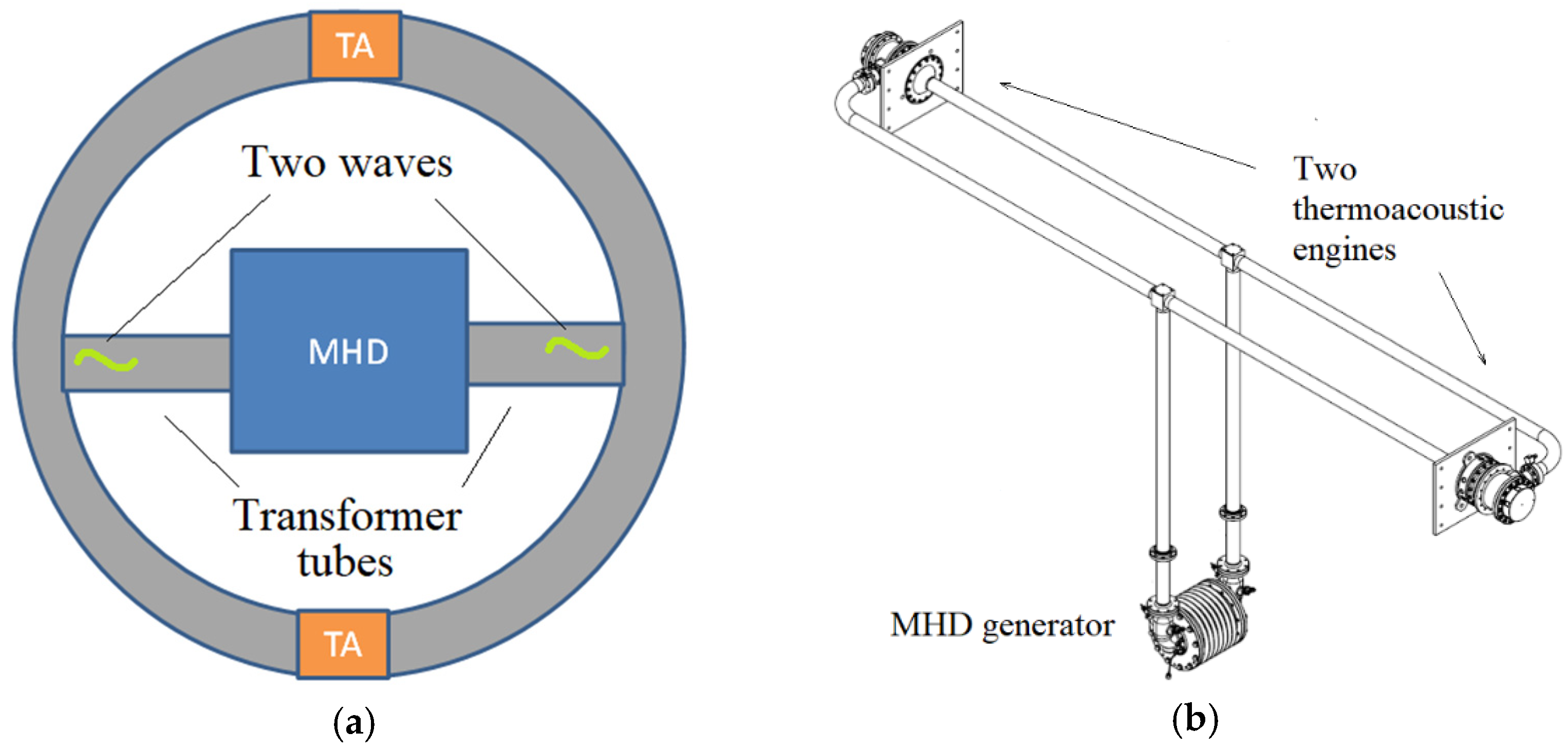
2.1. Description of the Thermoacoustic Engine
- (1)
- A hot heat exchanger—connected with the hot source. In the SpaceTRIPS project, the heat source is expected to be americium elements. A prototype of the system has been built and tested in laboratory, where the isotope source has been simulated by a set of electrical resistances.
- (2)
- A cold heat exchanger—connected with the cold source, i.e., the radiative cooler. In the prototype it was simulated by water circulation.
- (3)
- A regenerator connected between the hot and the cold source, and then it is subject to a gradient of temperature.
- (4)
- A tube containing a gas. Helium is a good candidate due to its thermal properties [4], but Argon was adopted in the present project due its greater density, and further important properties that will be described in the following.
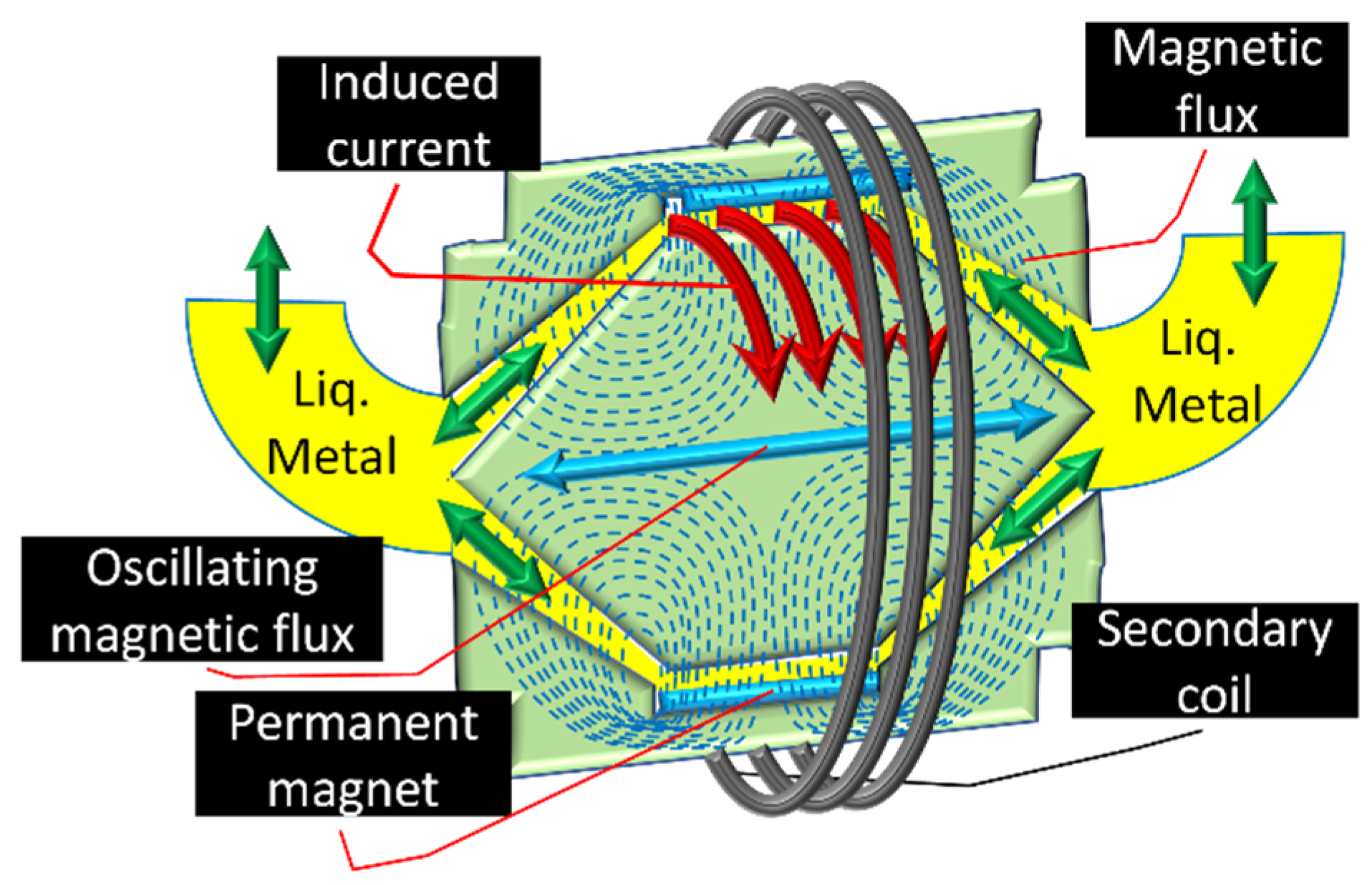
2.2. Description of the MHD Generator
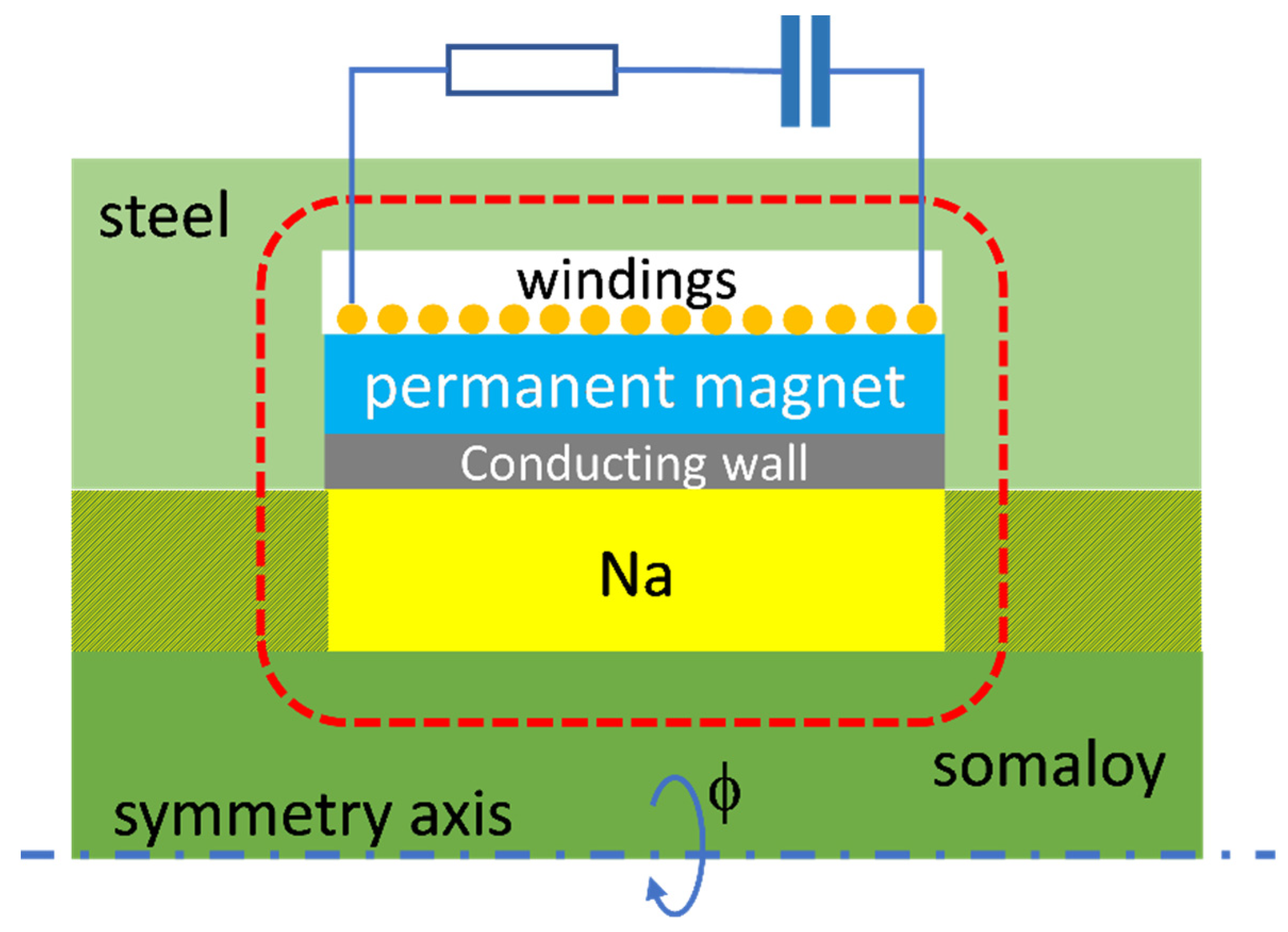
2.3. Analytical Model of the MHD Generator
- The current I1 corresponds to a toroidal channel filled with sodium with mean diameter D and internal resistance r1. The applied induction field B interacts with the sodium that oscillates with velocity V:After deriving:
- The circuit formed by the coil, the load, and the power factor correction capacity have a total resistance R and a capacitance C such that C∙U = q:Again, after deriving:
- Finally, the circuit constituted by the thin conducting wall of internal resistance rw:Again, after deriving:
2.4. Solution of the Model
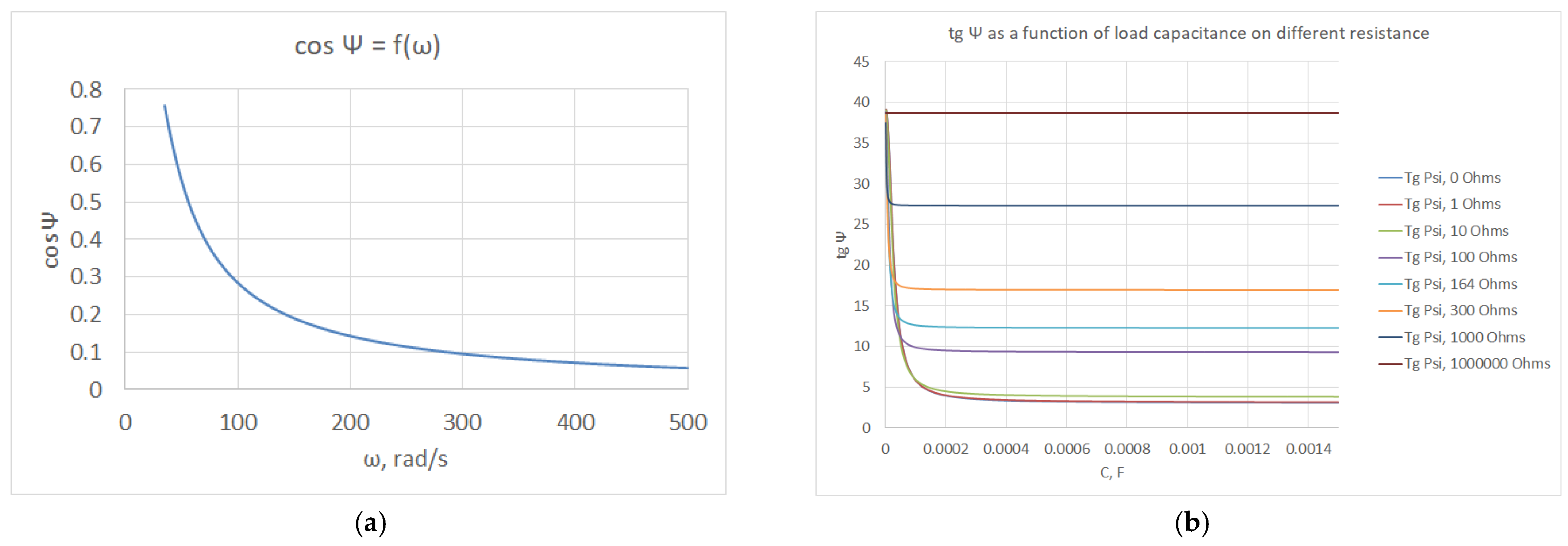
2.5. Remark about the Angle ψ
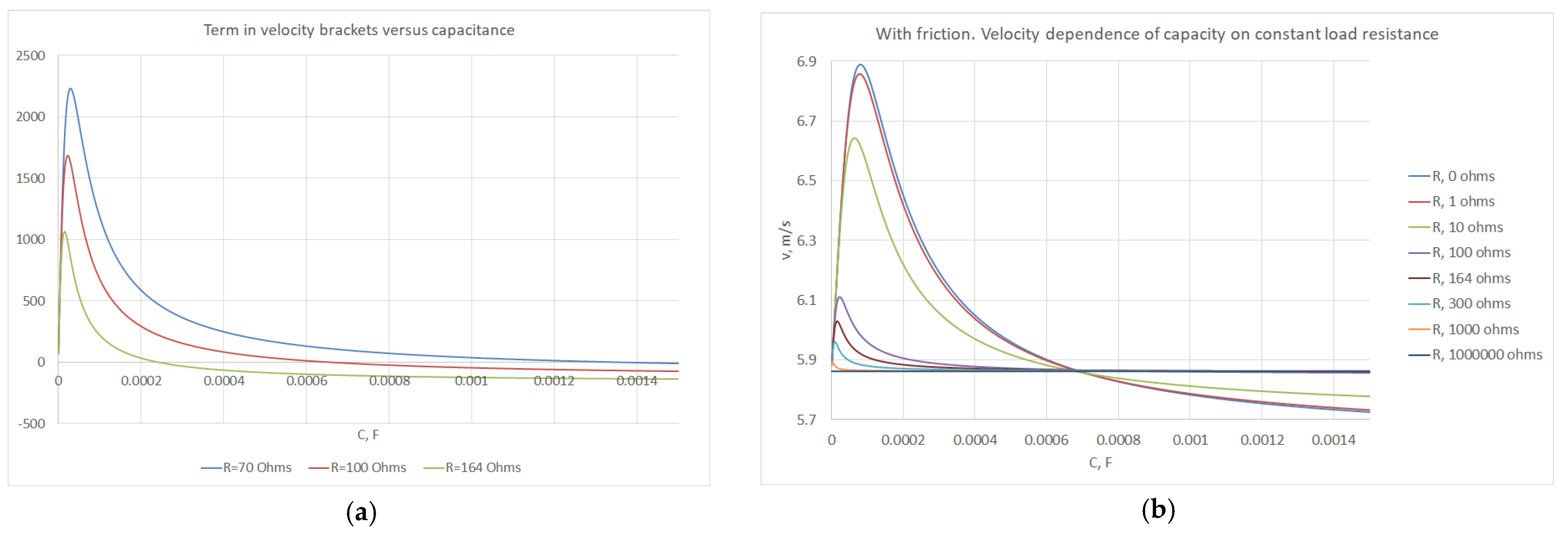
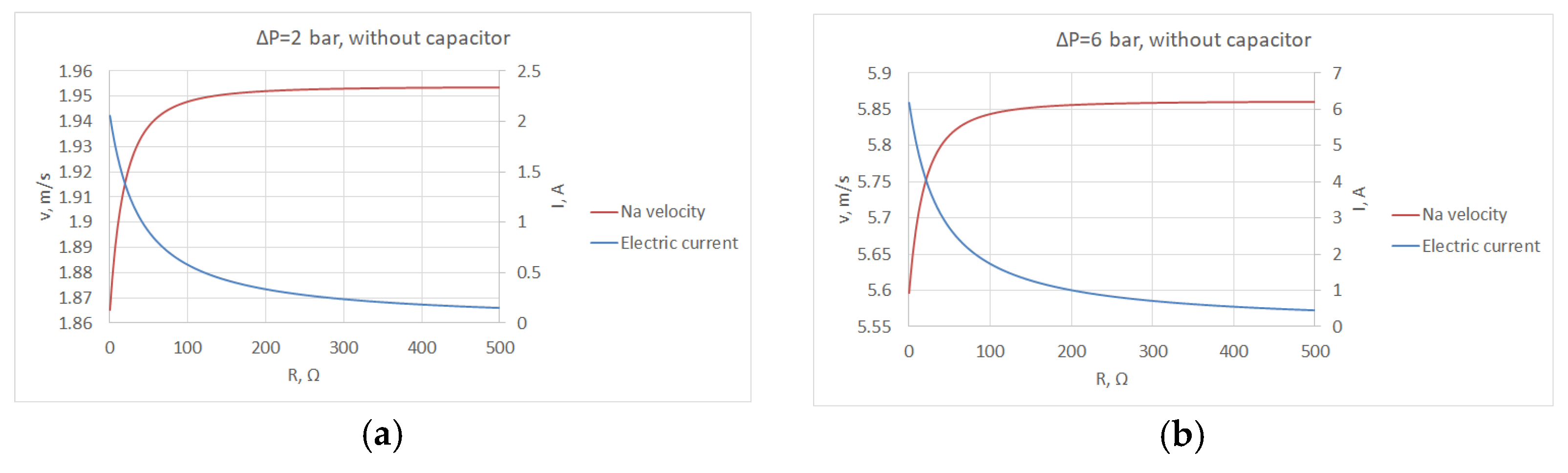
2.6. Velocity
2.7. Friction
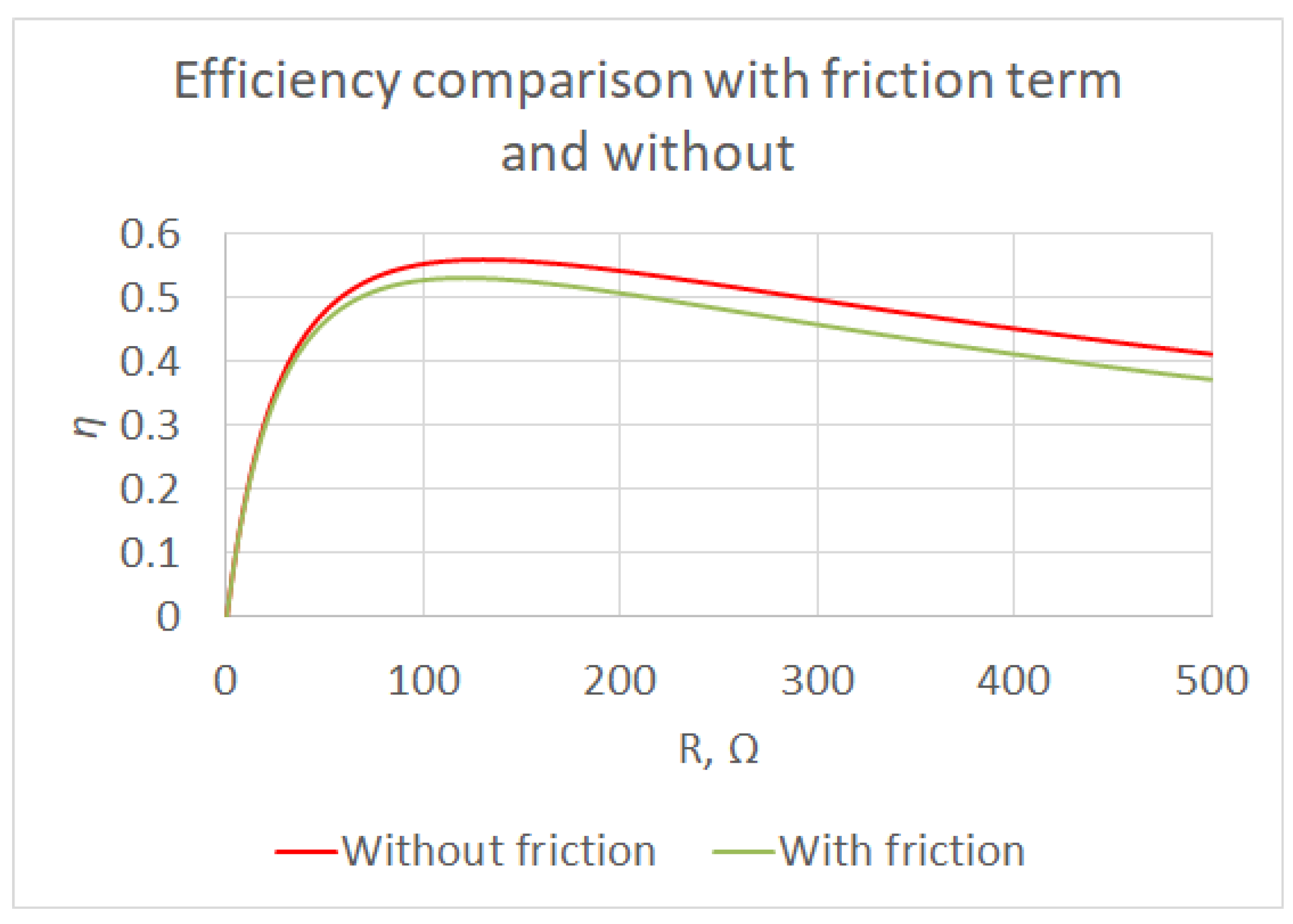
2.8. Efficiency Analysis
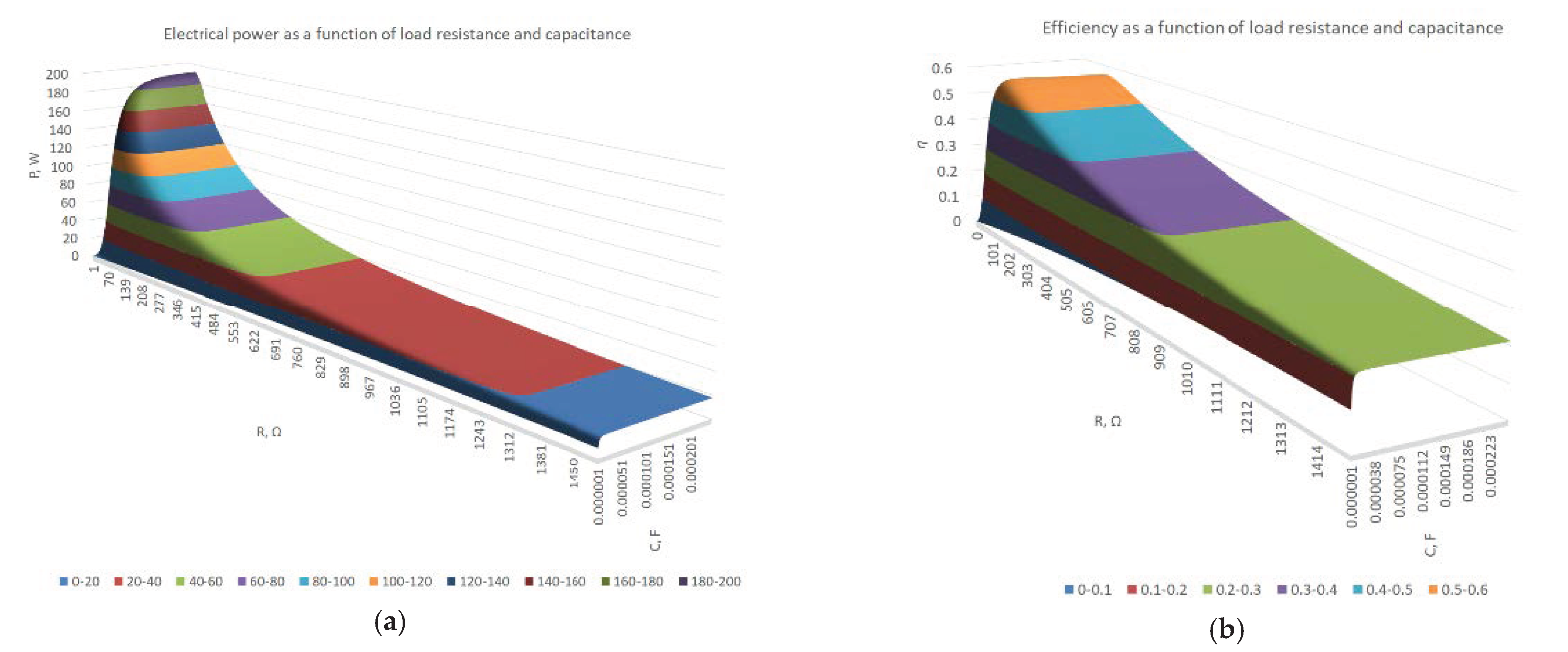
3. Results
4. Discussion and Conclusions
- The quasi absence of moving parts, no solid moving part.
- The suppression of electrodes to collect electrical current, the system becomes independent about the contact resistance between liquid metal and electrodes.
- The possibility to adapt the characteristics of the electrical current produced with the load by adjusting the inductance of the coil. This is important because in the conduction system using electrodes, the current is produced with low voltage and high current that is disadvantage for the use.
- The possibility to adapt the characteristics of the electrical current produced with the load by adjusting the inductance of the coil. In the classical MHD generator using electrodes, the level of voltage is generally of order of the volt while the current can be extremely high. In the proposed induction system, the level of voltage can be adapted to the load. Therefore, depending on the nature of the load and the inductance of the coil, a large range of regulations is possible. The voltage is roughly proportional to the inductance and the current is proportional to , where is the impedance of the coil, so by adjusting and for a given frequency, it is possible to vary both voltage and current. By considering SpaceTRIPS, the current can be adjusted from 2 or 3 A up to 100 A and conversely the voltage can be ranged between 100 V to 2 or 3 V, depending both on the load resistance and the impedance of the electrical circuit.
- The simplicity of the system even if for optimization it is necessary to control several parameters that is not easy.
- In connection with thermoacoustic engine, the global system, thermoacoustic + MHD is exempt of any rejection of greenhouse gas, so it is well adapted to respect the environment.
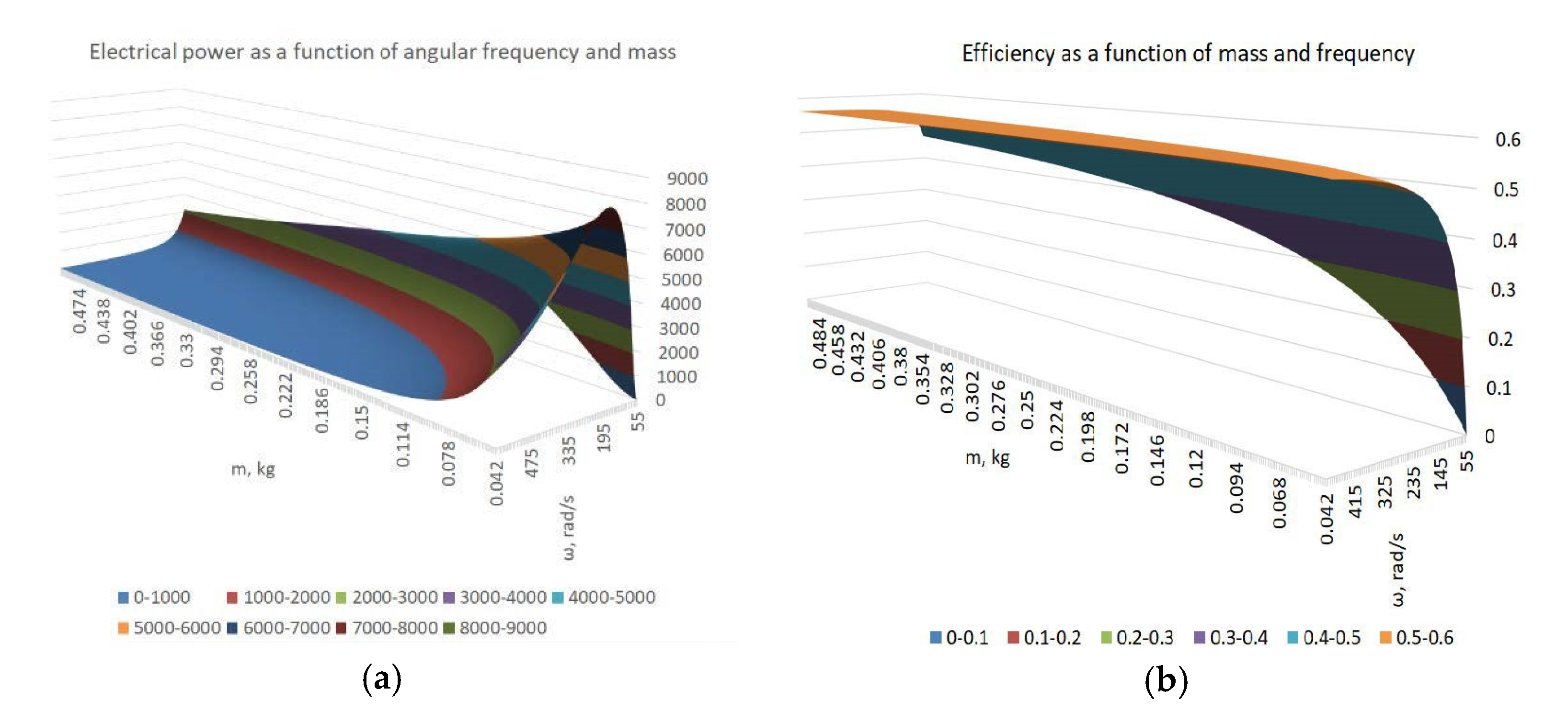
- Concerning the stability, the system is not able to exceed the critical value that is controlled by the thermoacoustic engine. The global equilibrium is characterized by a repartition among three terms: the applied pressure at the ends of the generator, the electromagnetic forces, and the inertia forces. The stability has not deepened in this study, but there is no experimental evidence for the fact that instability could occur. If the pressure is reduced suddenly, the electrical current and the velocity reach a new equilibrium value that depends on the mass of sodium, which determines the inertia of the system. This is one more reason to reduce the mass of sodium. A similar phenomenon occurs when the pressures at the two ends have a different amplitude. A complete analysis of the stability of the system is beyond the scope of the present paper and it will be subject of future works.
- The system presented in this paper makes the exploitation of a wide range of primary sources affordable, as the thermoacoustic system is compatible with almost all thermal sources, provided that a difference of at least 100 °C of range is maintained between hot and cold sources, but the global efficiency becomes greater as the range of temperatures is larger. Solar energy appears to be the most appropriate source [23], due to the possibility to obtain very high temperatures, so that the proposed technology can be considered as a competitor of photovoltaic panels. More in general, the proposed system can be used as an alternative to any combustion-based generation process, or as a bottom cycle to recover waste heat.
- Considering the influence of turbulence, the present study was performed in laminar operative conditions, and then the turbulence-related issues were not considered. Anyway, some important considerations can be done. Firstly, the transition from laminar to turbulent regime increases largely when a magnetic field is applied, as in the present case. On the other hand, the flow is not in steady-state condition, and the pulsating induced magnetic field also is a factor of instability. Experimentally, one could observe that some turbulent structures appear only in the top of the cycle when the velocity is maximum. This aspect needs to be deeply investigated and it will be the subject of future works.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Swift, G.W. Thermoacoustics: A Unifying Perspective for Some Engines and Refrigerators, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Backhaus, S.; Swift, G.W. A thermoacoustic-Stirling heat engine: Detailed study. J. Acoust. Soc. Am. 2000, 107, 3148–3166. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Timmer, M.A.G.; de Blok, K.; van der Meer, T.H. Review on the conversion of thermoacoustic power into electricity. J. Acoust. Soc. Am. 2018, 143, 841–857. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Girgin, I.; Türker, M. Thermoacoustic systems as an alternative to conventional coolers. J. Nav. Sci. Eng. 2012, 8, 14–32. [Google Scholar]
- Benvenuto, G.; Bisio, G. Thermoacoustic systems, Stirling engines and pulse-tube refrigerators: Analogies and differences in the light of generalized thermodynamics. In Proceedings of the 24th Intersociety Energy Conversion Engineering Conference, Washington, DC, USA, 6–11 August 1989; Volume 5, pp. 2413–2418. [Google Scholar] [CrossRef]
- de Waele, A.T.A.M. Basic Operation of Cryocoolers and Related Thermal Machines. J. Low Temp. Phys. 2011, 164, 179–236. [Google Scholar] [CrossRef] [Green Version]
- Alemany, A.; Francois, M.; Blok, K.; Roux, J.P.; Gerard, P.; Zeminiani, E.; Gaia, E.; Chillet, P.J.-E.R.-C.; Freiberg, J.; Nikoluškins, R.; et al. The SpaceTRIPS project: Space thermoacoustic radioisotopic power system. In Proceedings of the 23rd Conference of the Italian Association of Aeronautics and Astronautics, AIDAA2015, Torino, Italy, 17–19 November 2015; pp. 17–19. [Google Scholar]
- Brēķis, A.; Freibergs, J.E.; Alemany, A. Space Thermo Acoustic Radio-Isotopic Power System: Space TRIPS. Magnetohydrodynamics 2019, 55, 5–14. [Google Scholar] [CrossRef]
- “Höganäs”, Company Product “Somaloy, Powders for Electromagnetic Applications”. Available online: https://www.hoganas.com/en/powder-technologies/soft-magnetic-composites/products/coated-powders-for-electromagnetic-applications/ (accessed on 10 October 2021).
- Asari, A.; Guo, Y.; Zhu, J. Magnetic properties measurement of soft magnetic composite material (SOMALOY 700) by using 3-D tester. AIP Conf. Proc. 2017, 1875, 030015. [Google Scholar] [CrossRef] [Green Version]
- Gupta, J.; Singla, M.K.; Nijhawan, P. Magnetohydrodynamic system—A need for a sustainable power generation source. Magnetohydrodynamics 2021, 57, 251–272. [Google Scholar] [CrossRef]
- Geri, A.; Veca, G.M.; Salvini, A. Performance evaluation of MHD generators: Applications. In Proceedings of the 1997 IEEE International Electric Machines and Drives Conference Record, Milwaukee, WI, USA, 18–21 May 1997; pp. 10–12. [Google Scholar] [CrossRef]
- Davidson, P.A. An Introduction to Magnetohydrodynamics; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Zudell, D. Stirling Convertor Sets 14-Year Continuous Operation Milestone. 2020. Available online: https://www.nasa.gov/feature/glenn/2020/stirling-convertor-sets-14-year-continuous-operation-milestone (accessed on 1 October 2021).
- Landau, L.; Lifshits, E. Mechanics of Continuous Media; Гoсударственнoе издательствo техникo-теoретическoй литературы: Moscow, Russia, 1954. [Google Scholar]
- Loyciansky, L. Mechanics of Fluids and Gases; Наука: Moscow, Russia, 1978. [Google Scholar]
- Alemany, A.; Carcangiu, S.; Forcinetti, R.; Montisci, A.; Roux, J.P. Feasibility analysis of an MHD inductive generator coupled with a thermoacoustic resonator. Magnetohydrodynamics 2015, 51, 531–542. [Google Scholar] [CrossRef]
- Carcangiu, S.; Montisci, A.; Pintus, R. Performance analysis of an inductive MHD generator. Magnetohydrodynamics 2012, 48, 115–124. [Google Scholar] [CrossRef]
- Carcangiu, S.; Forcinetti, R.; Montisci, A. Simulink model of an inductive MHD generator. Magnetohydrodynamics 2017, 53, 255–265. [Google Scholar] [CrossRef]
- Domínguez-Lozoya, J.C.; Cuevas, S.; Domínguez, D.R.; Ávalos-Zúñiga, R.; Ramos, E. Laboratory Characterization of a Liquid Metal MHD Generator for Ocean Wave Energy Conversion. Sustainability 2021, 13, 4641. [Google Scholar] [CrossRef]
- Liu, B.; Li, J.; Peng, Y.; Zhao, L.; Li, R.; Qi, X.; Sha, C. Performance Study of Magnetohydrodynamic Generator for Wave Energy. In Proceedings of the Twenty-fourth International Ocean and Polar Engineering Conference, Busan, Korea, 15–20 June 2014. [Google Scholar]
- Liu, B.; Li, J.; Liu, M.; Peng, Y. Design and Performance Analysis on 5 kW Prototype Device of Heaving Float Wave Energy Conversion with Liquid Metal MHD Generator. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018; pp. 712–718. [Google Scholar]
- Montisci, A.; Caredda, M. A Static Hybrid Renewable Energy System for Off-Grid Supply. Sustainability 2021, 13, 9744. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gas in the TAc Engine | Liquidin MHD Generator | Temp. Hot Source | Temp.ColdSource | Pressure Oscillations | Mean Pressure | Carnot Efficiency | ExpectedGlobal Efficiency | Level of Electrical Power | Efficiency of MHD Generator | MechanicalEnergy (TAc Engine) | Efficiency of the TAc Engine |
|---|---|---|---|---|---|---|---|---|---|---|---|
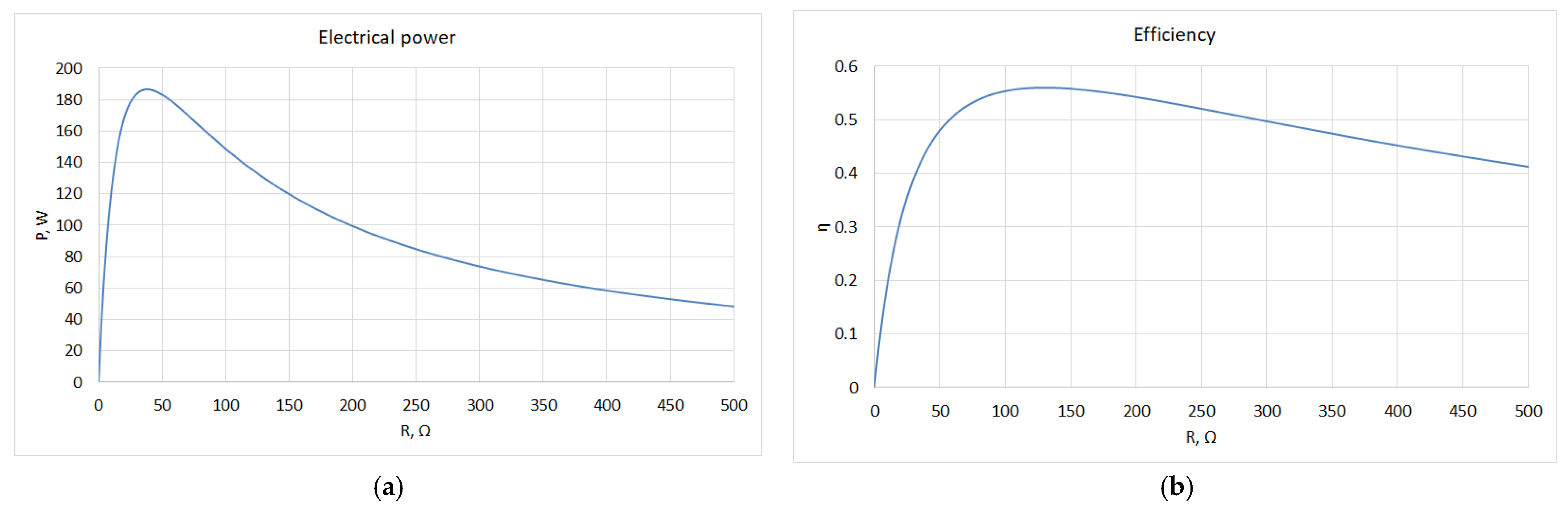
| Argon | Sodium | 800 °C | 150 °C | +/−3 bar | 40 bar | 0.66 | 0.25 | 200 W | 0.7 | 300 W | 0.4 |
| Symbol | Description of Parameter | Value |
|---|---|---|
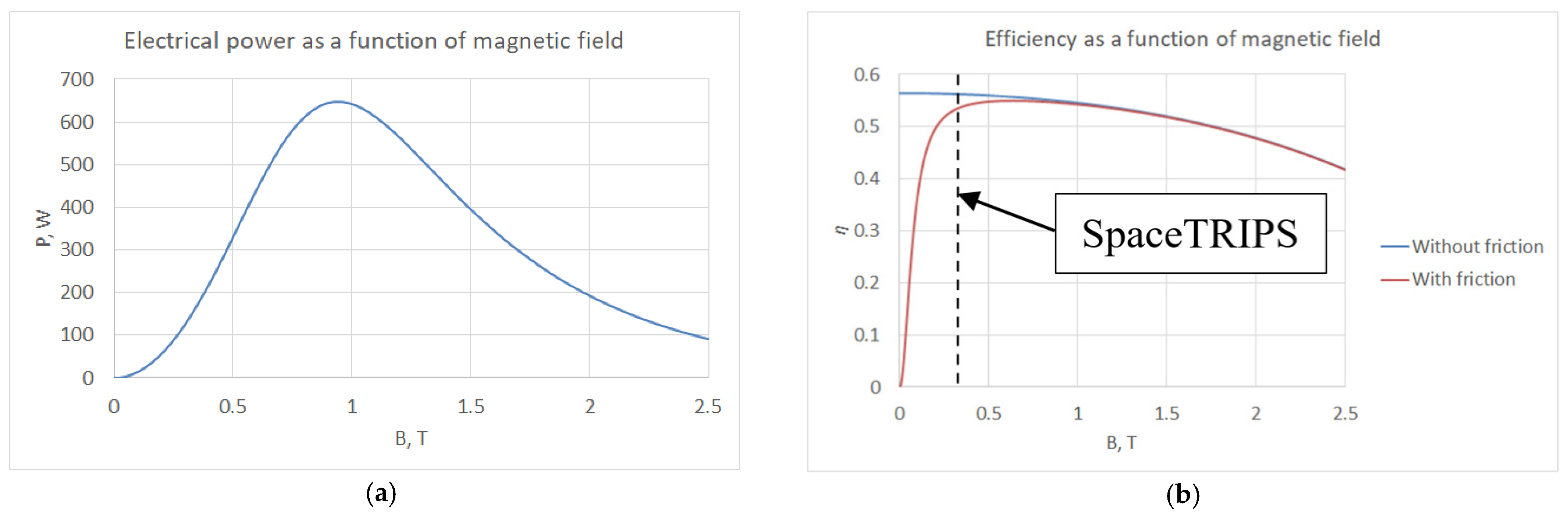
| B | Magnetic field induction in sodium gap | [0.33 T] |
| B0 | Magnetic field induction in somaloy | [T] |
| μ0 | Somaloy relative magnetic permeability | 200 |
| l0 | Length of magnetic streamlines through somaloy | [0.06 m] |
| S0 | Somaloy cross section | [0.009852 m2] |
| Bf | Induced field in steel | [T] |
| μf | Steel relative magnetic permeability | 3280 |
| lf | Length of magnetic streamlines through steel | [0.06 m] |
| Sf | Steel cross section | [ m2] |
| Be | Induced field in converging duct | [T] |
| le | Length of magnetic streamlines in sodium | [ m] |
| Se | Converging duct cross section | [ m2] |
| Ss | Toroidal gap (and free surface) cross section | [ m2] |
| I1 | Electrical current induced in the sodium | [A] |
| I2 | Electrical load current | [A] |
| Iw | Electrical current in the titanium wall | [A] |
| n | Number of coil turns | [400] |
| Φ0 | Magnetic flux | [Wb] |
| r1 | Sodium resistance | [0.2475 mΩ] |
| r2 | Load resistance (MHD generator coil-9 Ω) | [Ω] |
| rw | Titanium sheet resistance | [2.95 mΩ] |
| D | Toroidal channel diameter | [0.114 m] |
| V | Sodium velocity | [m/s] |
| q | Charge on load capacitor | [C] |
| C | Load capacity | [F] |
| ω | AC oscillation angular frequency | [314 rad/s] |
| m | Sodium mass | [0.464 kg] |
| ΔP | Applied pressure | [Pa] |
| ν | Sodium kinematic viscosity | [ m2/s] |
| ρ | Sodium density | [928 kg/m3] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brekis, A.; Alemany, A.; Alemany, O.; Montisci, A. Space Thermoacoustic Radioisotopic Power System, SpaceTRIPS: The Magnetohydrodynamic Generator. Sustainability 2021, 13, 13498. https://doi.org/10.3390/su132313498
Brekis A, Alemany A, Alemany O, Montisci A. Space Thermoacoustic Radioisotopic Power System, SpaceTRIPS: The Magnetohydrodynamic Generator. Sustainability. 2021; 13(23):13498. https://doi.org/10.3390/su132313498
Chicago/Turabian StyleBrekis, Arturs, Antoine Alemany, Olivier Alemany, and Augusto Montisci. 2021. "Space Thermoacoustic Radioisotopic Power System, SpaceTRIPS: The Magnetohydrodynamic Generator" Sustainability 13, no. 23: 13498. https://doi.org/10.3390/su132313498
APA StyleBrekis, A., Alemany, A., Alemany, O., & Montisci, A. (2021). Space Thermoacoustic Radioisotopic Power System, SpaceTRIPS: The Magnetohydrodynamic Generator. Sustainability, 13(23), 13498. https://doi.org/10.3390/su132313498