
Electric Vehicle Assignment Considering Users’ Waiting Time



Abstract
:1. Introduction
2. Literature Review
2.1. Decision Problem
2.2. Optimization Model
2.3. User Flexibility
3. Methodology
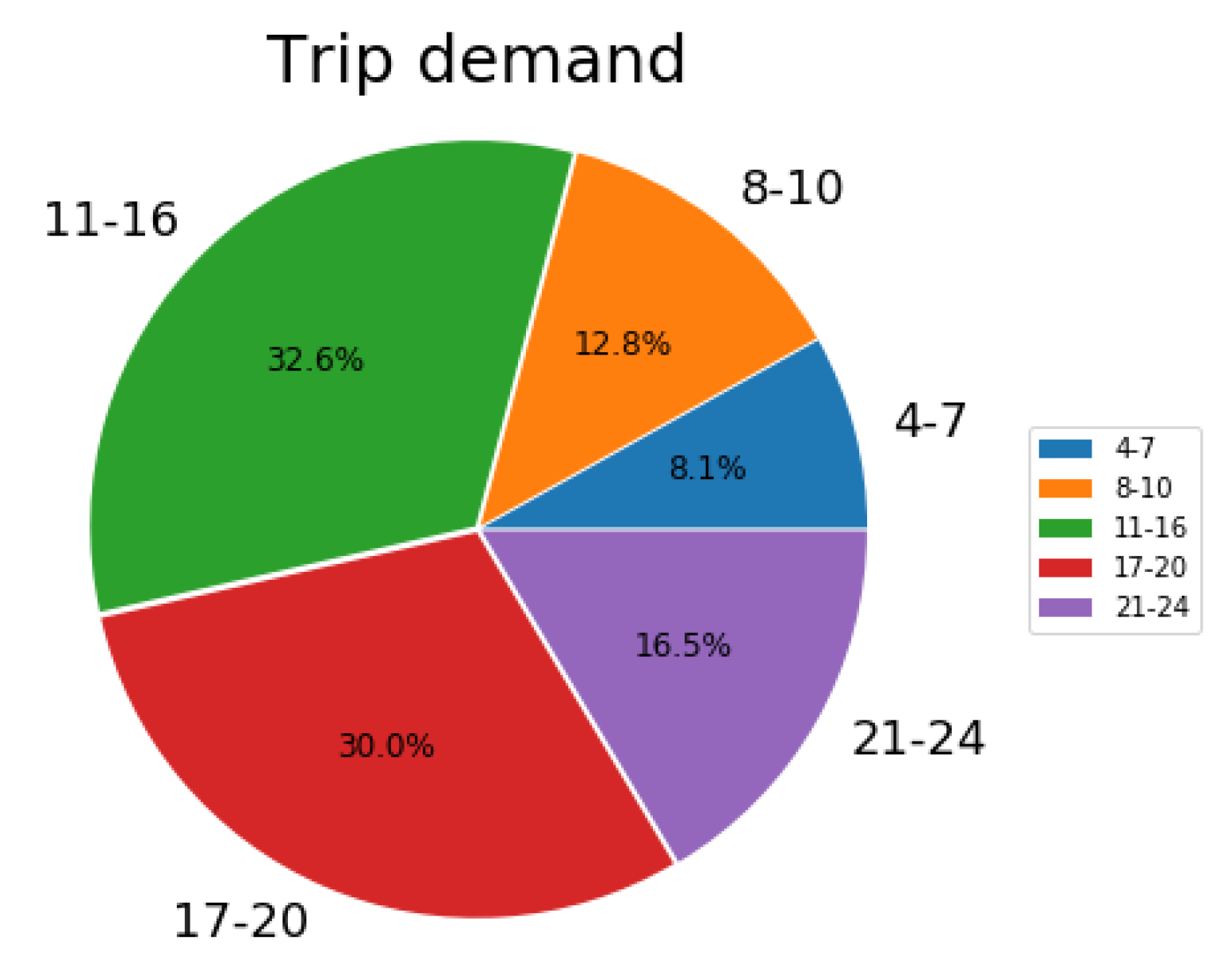
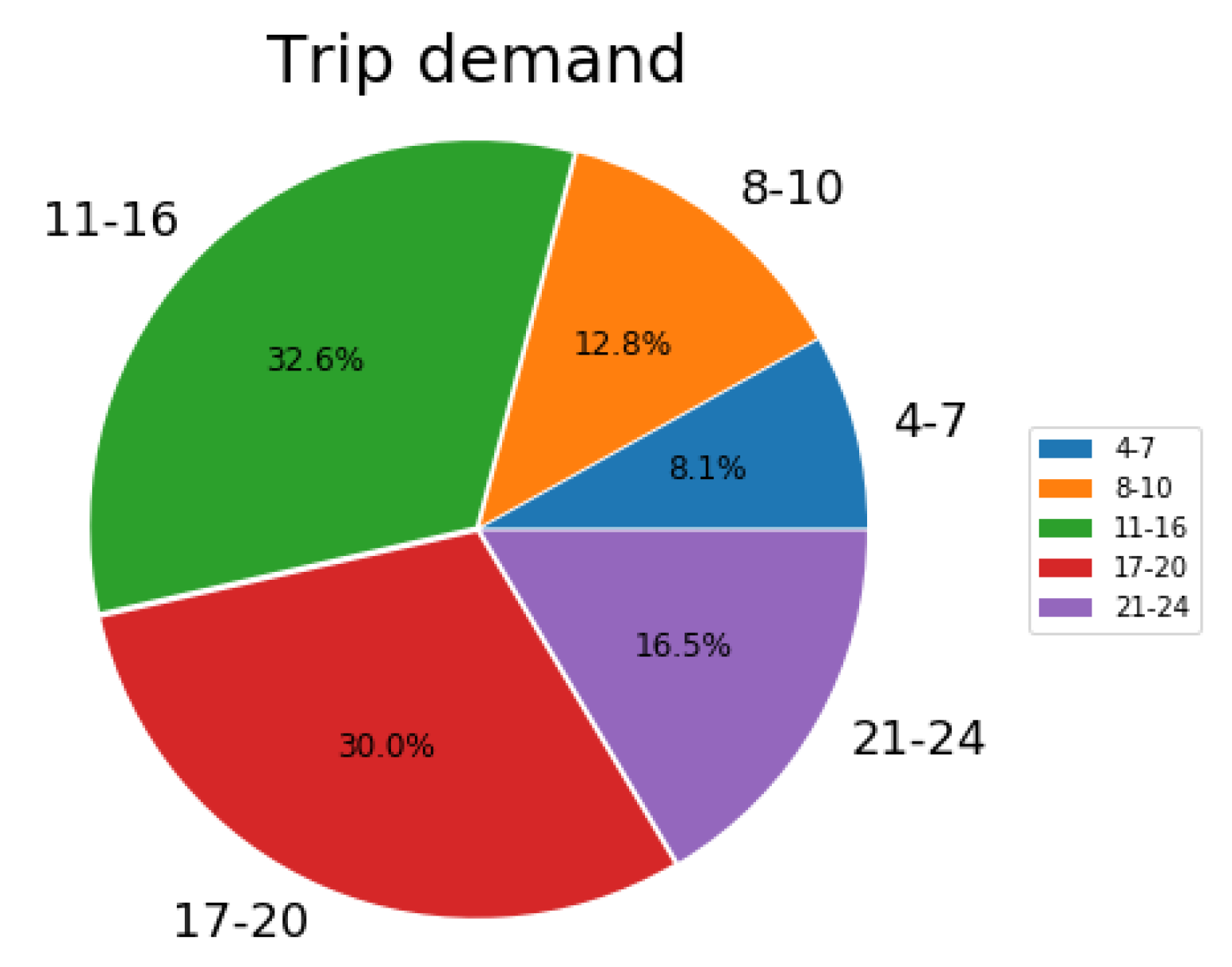
- The short and equal time intervals were chosen in our ECSS model. The trips between two time intervals were calculated into the later time point. For example, if the time interval is 15 min, it means that trips between 10:01 and 10:14 are classified as the trips at 10:15.
- The platform only makes operation decisions at the end of each time interval, and the time at which trips and an EV’s status change during this time interval was set to the end of the interval.
- There is a fixed number of parking spots in a station, and all of them are equipped with the same charging equipment. For each station, the amount of EVs must be smaller than the number of its parking spot capacity.
- A user provides the information of the origin station, the destination station, and the expected departure time to the platform. We assumed all trip demands are known in advance before daily operation.
- The journey time between two stations was assumed to be unchanging, symmetric, and only determined by the origin and destination stations throughout the day.
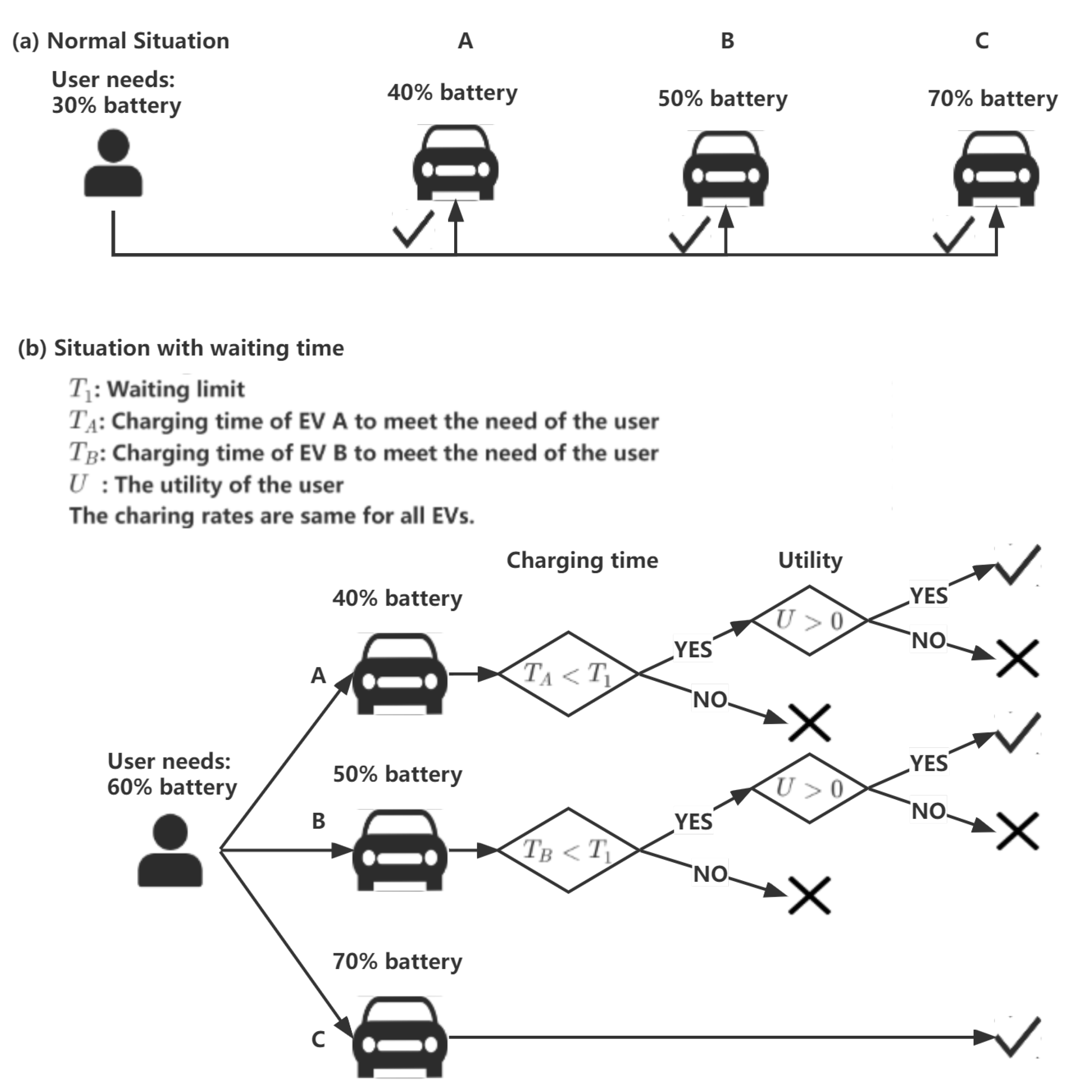
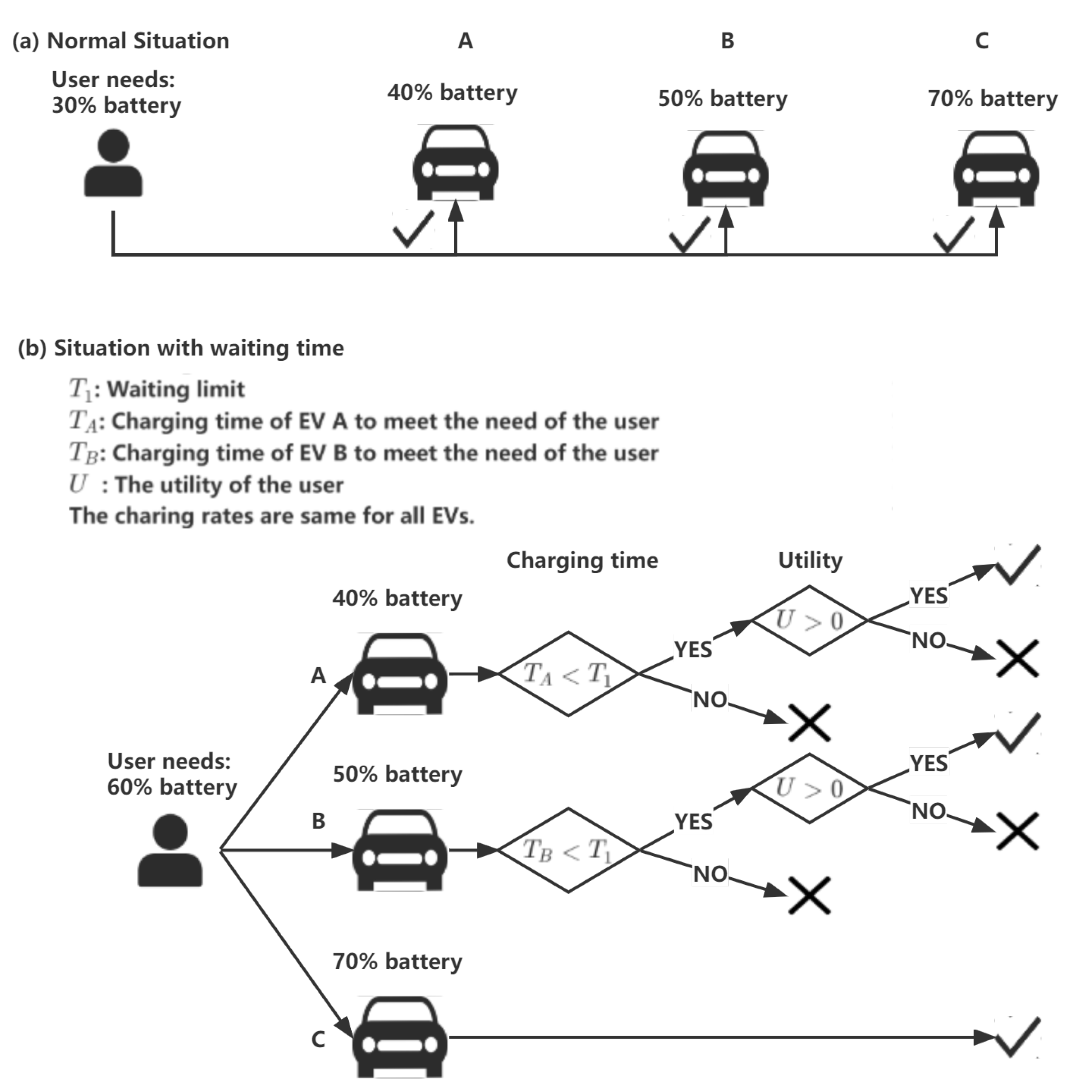
3.1. The EV Assignment Model
3.2. The EV Assignment Model with Waiting Time
4. Numerical Experiments
4.1. Settings of Numerical Experiments
| Algorithm 1: Bi-level programming solution |
|
4.2. Assessment of EV Assignment and Waiting Time
- ⋄
- Total profit: Although the policy was to provide users with a better experience, its essence is to increase the total profit of the platform.
- ⋄
- Trip fulfillment rate: Trips that are assigned to any EVs are regarded as fulfilled. We denoted this indicator as trips fulfilled divided by all trip demands.
- ⋄
- Utilization per EV: We took this indicator as the average travel time of an EV during one-day operation. It was used to measure the truly used situation of EVs.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mobile, A. 2020. Available online: https://www.jiguang.cn/reports/494 (accessed on 27 March 2021).
- Illgen, S.; Höck, M. Literature review of the vehicle relocation problem in one-way car sharing networks. Transp. Res. Part B Methodol. 2019, 120, 193–204. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Mallery, M.A.; Kingsley, K.J. Personal vehicle sharing services in North America. Res. Transp. Bus. Manag. 2012, 3, 71–81. [Google Scholar] [CrossRef] [Green Version]
- Schiavo, F.T.; Calili, R.F.; de Magalhães, C.F.; Fróes, I.C.G. The Meaning of Electric Cars in the Context of Sustainable Transition in Brazil. Sustainability 2021, 13, 11073. [Google Scholar] [CrossRef]
- Jorge, D.; Molnar, G.; de Almeida Correia, G.H. Trip pricing of one-way station-based carsharing networks with zone and time of day price variations. Transp. Res. Part B Methodol. 2015, 81, 461–482. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Sanchez-Diaz, I. Electric vehicle routing problem with machine learning for energy prediction. Transp. Res. Part B Methodol. 2021, 145, 24–55. [Google Scholar] [CrossRef]
- Furuhata, M.; Dessouky, M.; Ordóñez, F.; Brunet, M.E.; Wang, X.; Koenig, S. Ridesharing: The state-of-the-art and future directions. Transp. Res. Part B Methodol. 2013, 57, 28–46. [Google Scholar] [CrossRef]
- Boyacı, B.; Zografos, K.G. Investigating the effect of temporal and spatial flexibility on the performance of one-way electric carsharing systems. Transp. Res. Part B Methodol. 2019, 129, 244–272. [Google Scholar] [CrossRef] [Green Version]
- Su, S.; Wei, C.; Li, Z.; Xia, D. Two-Stage Multi-Period Coordinated Load Restoration Strategy for Distribution Network Based on Intelligent Route Recommendation of Electric Vehicles. World Electr. Veh. J. 2021, 12, 121. [Google Scholar] [CrossRef]
- Boyacı, B.; Zografos, K.G.; Geroliminis, N. An optimization framework for the development of efficient one-way car-sharing systems. Eur. J. Oper. Res. 2015, 240, 718–733. [Google Scholar] [CrossRef] [Green Version]
- Boyacı, B.; Zografos, K.G.; Geroliminis, N. An integrated optimization-simulation framework for vehicle and personnel relocations of electric carsharing systems with reservations. Transp. Res. Part B Methodol. 2017, 95, 214–237. [Google Scholar] [CrossRef] [Green Version]
- Xue, Y.; Zhang, Y.; Chen, Y. An Evaluation Framework for the Planning of Electric Car-Sharing Systems: A Combination Model of AHP-CBA-VD. Sustainability 2019, 11, 5627. [Google Scholar] [CrossRef] [Green Version]
- Bruglieri, M.; Colorni, A.; Luè, A. The Vehicle Relocation Problem for the One-way Electric Vehicle Sharing: An Application to the Milan Case. Procedia-Soc. Behav. Sci. 2014, 111, 18–27. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Niu, S.; Xu, H.; Li, X. A New Method to Plan the Capacity and Location of Battery Swapping Station for Electric Vehicle Considering Demand Side Management. Sustainability 2016, 8, 557. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Zhang, T.; Wang, W.; Peng, X.; Liu, M.; Jia, H.; Su, S. Two-Stage Physical Economic Adjustable Capacity Evaluation Model of Electric Vehicles for Peak Shaving and Valley Filling Auxiliary Services. Sustainability 2021, 13, 8153. [Google Scholar] [CrossRef]
- Waserhole, A.; Jost, V.; Brauner, N. Pricing techniques for self regulation in Vehicle Sharing Systems. Electron. Notes Discret. Math. 2013, 41, 149–156. [Google Scholar] [CrossRef]
- Chow, Y.; Yu, J. Real-time bidding based vehicle sharing. In Proceedings of the 14th International Conference on Autonomous Agents and Multiagent Systems, AAMAS 2015, Istanbul, Turkey, 4–8 May 2015; International Foundation for Autonomous Agents and Multiagent Systems (IFAAMAS): New York, NY, USA, 2015; Volume 3, pp. 1829–1830. [Google Scholar]
- Xu, M.; Meng, Q.; Liu, Z. Electric vehicle fleet size and trip pricing for one-way carsharing services considering vehicle relocation and personnel assignment. Transp. Res. Part B Methodol. 2018, 111, 60–82. [Google Scholar] [CrossRef]
- Huang, K.; An, K.; de Almeida Correia, G.H. Planning station capacity and fleet size of one-way electric carsharing systems with continuous state of charge functions. Eur. J. Oper. Res. 2020, 287, 1075–1091. [Google Scholar] [CrossRef]
- Lu, R.; de Almeida Correia, G.H.; Zhao, X.; Liang, X.; Lv, Y. Performance of one-way carsharing systems under combined strategy of pricing and relocations. Transp. B Transp. Dyn. 2021, 9, 134–152. [Google Scholar] [CrossRef]
- Xu, Z.; Li, Z.; Guan, Q.; Zhang, D.; Li, Q.; Nan, J.; Liu, C.; Bian, W.; Ye, J. Large-Scale Order Dispatch in On-Demand Ride-Hailing Platforms: A Learning and Planning Approach; KDD ’18; Association for Computing Machinery: New York, NY, USA, 2018; pp. 905–913. [Google Scholar]
- Lyu, G.; Cheung, W.C.; Teo, C.; Wang, H. Multi-Objective Online Ride-Matching. SSRN 3356823 2019. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=3356823 (accessed on 27 March 2021).
- Özkan, E.; Ward, A.R. Dynamic matching for real-time ride sharing. Stoch. Syst. 2020, 10, 29–70. [Google Scholar] [CrossRef] [Green Version]
- Hu, M.; Zhou, Y. Dynamic Type Matching. Manuf. Serv. Oper. Manag. 2021. [Google Scholar] [CrossRef]
- Bian, Z.; Liu, X. Mechanism design for first-mile ridesharing based on personalized requirements part I: Theoretical analysis in generalized scenarios. Transp. Res. Part B Methodol. 2019, 120, 147–171. [Google Scholar] [CrossRef]
- Yang, H.; Qin, X.; Ke, J.; Ye, J. Optimizing matching time interval and matching radius in on-demand ride-sourcing markets. Transp. Res. Part B Methodol. 2020, 131, 84–105. [Google Scholar] [CrossRef]
- Abdolmaleki, M.; Masoud, N.; Yin, Y. Transit timetable synchronization for transfer time minimization. Transp. Res. Part B Methodol. 2020, 131, 143–159. [Google Scholar] [CrossRef]
- Correia, G.H.D.A.; Jorge, D.R.; Antunes, D.M. The added value of accounting for users’ flexibility and information on the potential of a station-based one-way car-sharing system: An application in Lisbon, Portugal. J. Intell. Transp. Syst. 2014, 18, 299–308. [Google Scholar] [CrossRef]
- Stiglic, M.; Agatz, N.; Savelsbergh, M.; Gradisar, M. The benefits of meeting points in ride-sharing systems. Transp. Res. Part B Methodol. 2015, 82, 36–53. [Google Scholar] [CrossRef] [Green Version]
- Tong, L.C.; Zhou, L.; Liu, J.; Zhou, X. Customized bus service design for jointly optimizing passenger-to-vehicle assignment and vehicle routing. Transp. Res. Part C Emerg. Technol. 2017, 85, 451–475. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, Y.; He, S. Vehicle assignment and relays for one-way electric car-sharing systems. Transp. Res. Part B Methodol. 2019, 120, 125–146. [Google Scholar] [CrossRef]
- Alencar, V.A.; Rooke, F.; Cocca, M.; Vassio, L.; Almeida, J.; Vieira, A.B. Characterizing client usage patterns and service demand for car-sharing systems. Inf. Syst. 2019, 98, 101448. [Google Scholar] [CrossRef]
- Nourinejad, M.; Zhu, S.; Bahrami, S.; Roorda, M.J. Vehicle relocation and staff rebalancing in one-way carsharing systems. Transp. Res. Part E Logist. Transp. Rev. 2015, 81, 98–113. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Sets | Definition |
| N | Sets of stations. |
| R | Sets of trips. |
| V | Sets of EVs. |
| Sets of discrete time points. | |
| Sets of discrete battery levels. | |
| Sets of trips with actual departure time t. | |
| Sets of EVs at time t. | |
| Sets of trips with completion time t and destination station n. | |
| Sets of available matching at time t. | |
| Sets of actual matching at time t. | |
| Sets of available matching with waiting time at time t. | |
| Sets of actual matching with waiting time at time t. | |
| Parameters | Definition |
| Battery consumption of trip r. | |
| Battery level of EV v at time t. | |
| Charging state of v at time t. | |
| The used spots of station n at time t. | |
| The time at which the user schedules the request. | |
| The battery level of EV v at time t. | |
| The station of EV v at time t. | |
| Safety battery level. | |
| Profit rate. | |
| Subsidy to trip r. | |
| Loss rate. | |
| Charging rate. | |
| Consumption rate. | |
| Length between two time intervals. | |
| Decision Variables | Definition |
| Decision of whether to assign trip r to EV v at time t. | |
| Waiting time of trip r. |
| Station | EV | Trip | EVAM | EVAMT | ||||
|---|---|---|---|---|---|---|---|---|
| Profit | Fulfillment | Utilization | Profit | Fulfillment | Utilization | |||
| 3 | 12 | 328 | 503 | 68.64% | 44.75 | 536 | 72.57% | 51.66 |
| 10 | 40 | 833 | 1463 | 54.50% | 40.23 | 1609 | 58.96% | 46.98 |
| 20 | 80 | 1676 | 3415 | 52.68% | 41.44 | 3715 | 57.33% | 47.51 |
| 30 | 120 | 2447 | 4579 | 53.82% | 40.95 | 4914 | 55.28% | 46.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, W.; Chen, J.; Ke, H. Electric Vehicle Assignment Considering Users’ Waiting Time. Sustainability 2021, 13, 13484. https://doi.org/10.3390/su132313484
Ma W, Chen J, Ke H. Electric Vehicle Assignment Considering Users’ Waiting Time. Sustainability. 2021; 13(23):13484. https://doi.org/10.3390/su132313484
Chicago/Turabian StyleMa, Weimin, Jiakai Chen, and Hua Ke. 2021. "Electric Vehicle Assignment Considering Users’ Waiting Time" Sustainability 13, no. 23: 13484. https://doi.org/10.3390/su132313484
APA StyleMa, W., Chen, J., & Ke, H. (2021). Electric Vehicle Assignment Considering Users’ Waiting Time. Sustainability, 13(23), 13484. https://doi.org/10.3390/su132313484