
Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
- Simultaneous optimization of PID control coefficients for an island microgrid with a wind turbine equipped with a two-way induction generator;
- The use of Craziness-Based Particle Swarm Optimization (CRPSO), which is an improved version of Particle Swarm Optimization (PSO) and is used to improve the convergence speed in optimizing the nonlinear problem of load and frequency controller design;
- Using the appropriate objective functions to reduce the settling time, maximum overshoot value and undershoot value.
2. Materials and Methods
2.1. Microgrid Load Frequency Control
2.2. Microbridge Frequency Response Modeling
2.3. Power and System Frequency Deviation
2.4. Diesel Generator
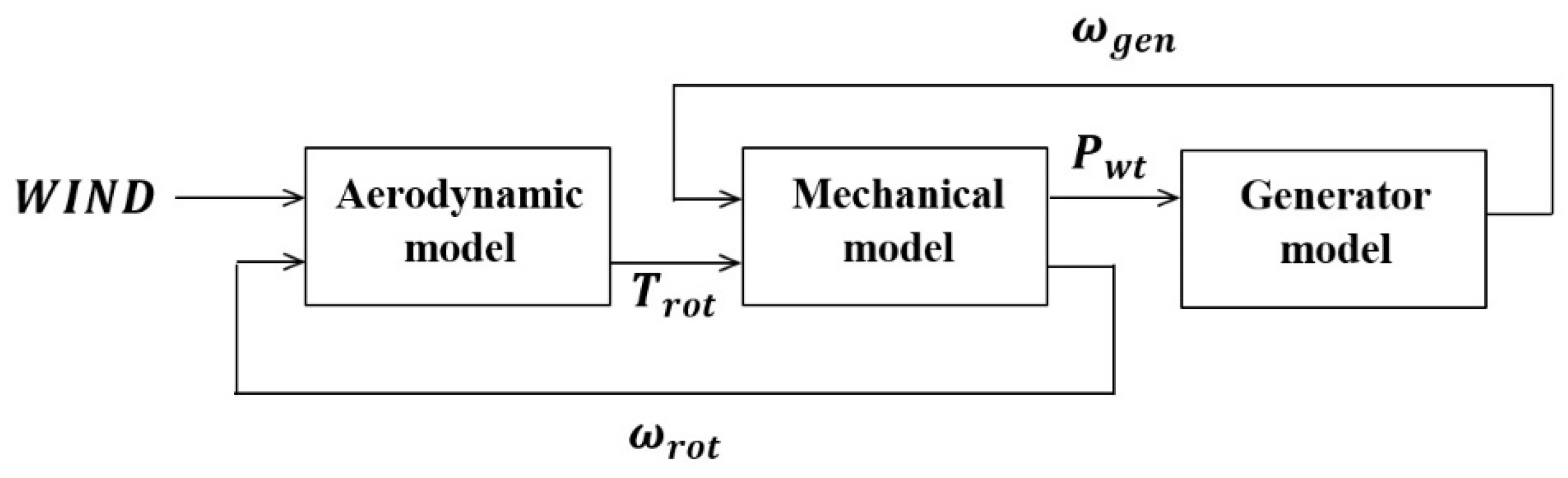
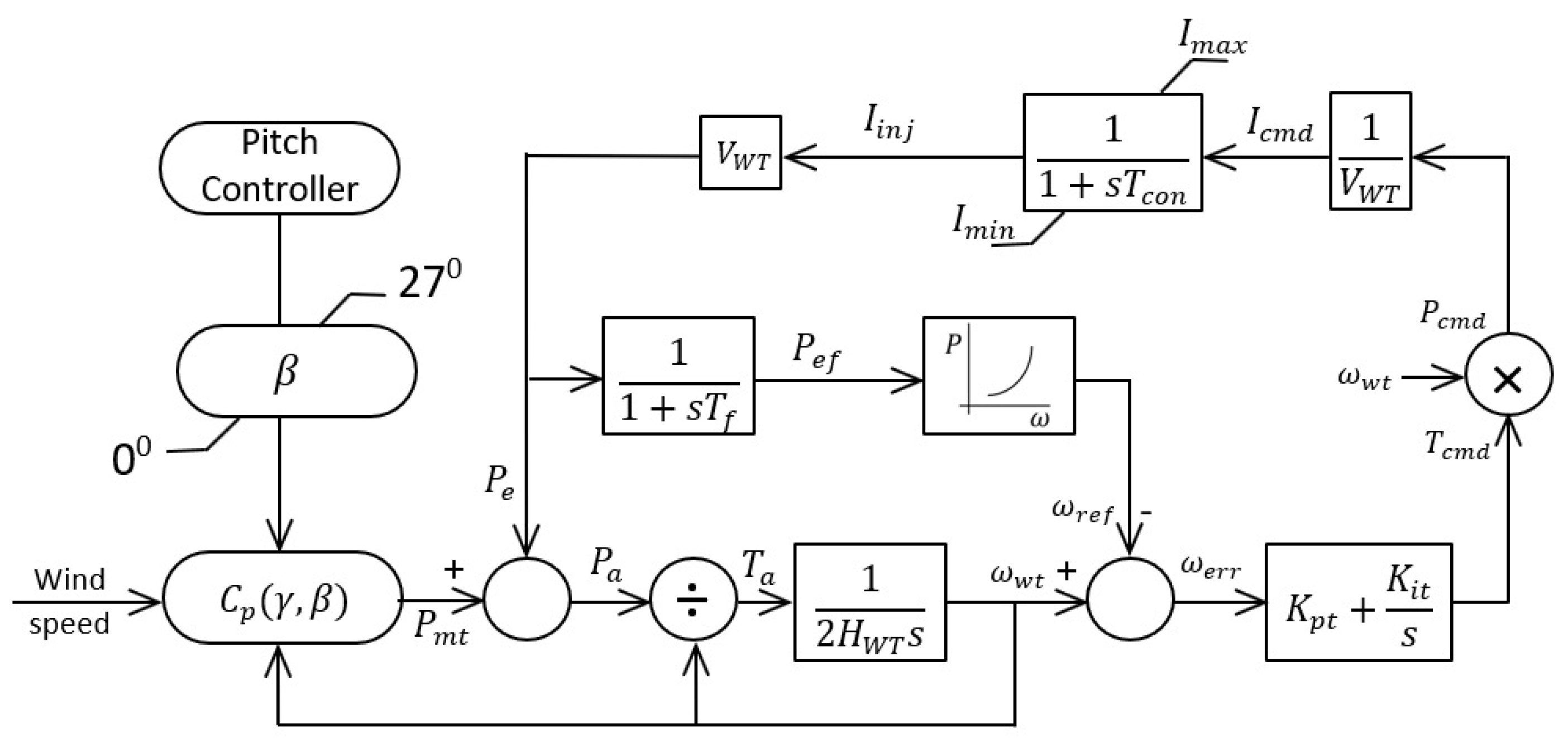
2.5. Wind Turbine
2.6. Solar PV
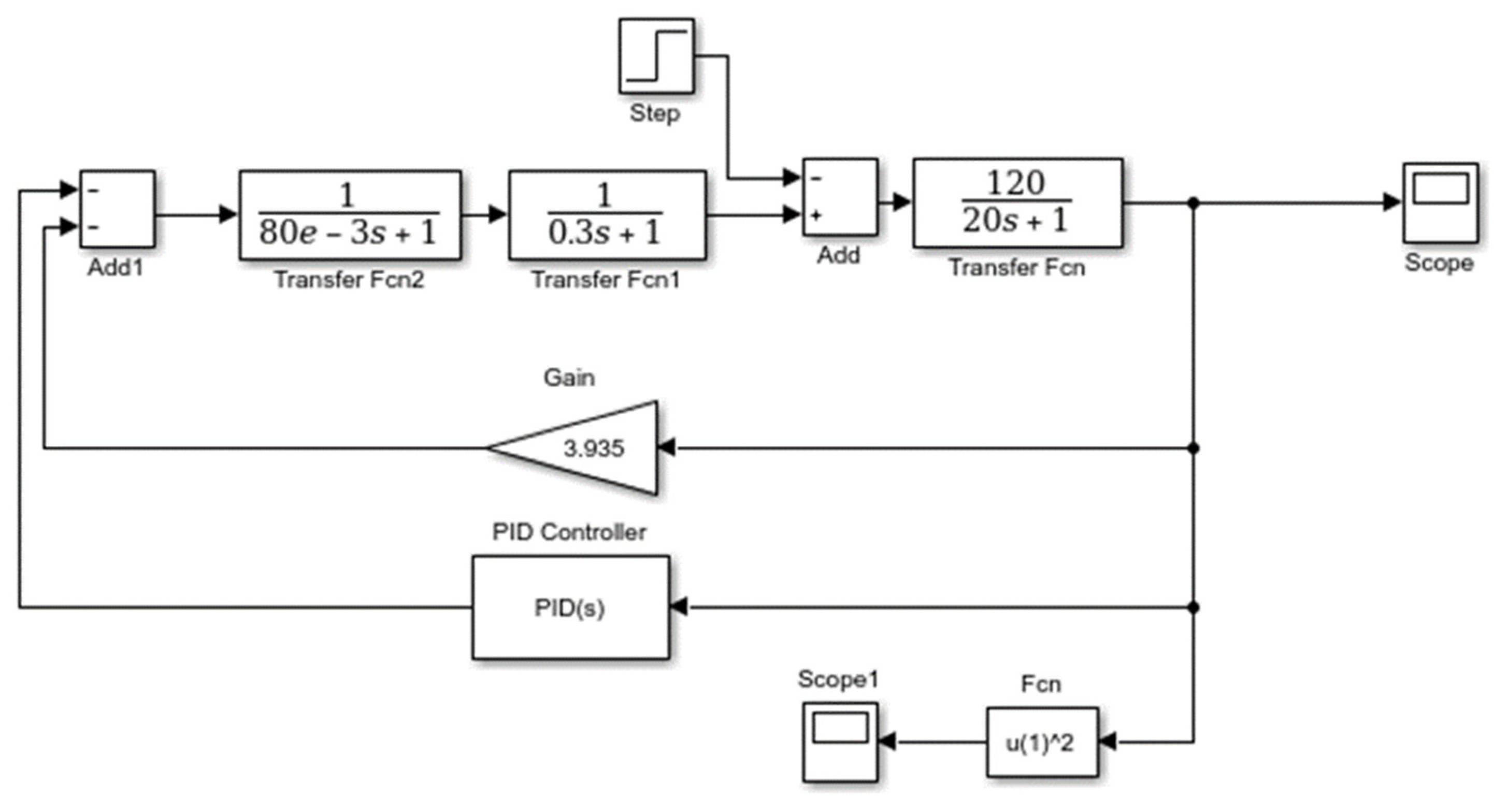
2.7. Load Frequency Control (LFC)
2.8. Objective Function and Optimization with CRPSO
- Model the microgrid frequency response;
- Initialization of particles (PID coefficients are selected between 0 and 5);
- Execute the Simulink file of the frequency model and send the frequency response of the microgrid to calculate the objective function;
- Calculate the objective function for the PID coefficients of each particle;
- Determine the best local and global particle;
- Update the particle speed;
- Update the positions of the particles;
- Calculate the objective function for the PID coefficients of each particle;
- If the condition of stopping the algorithm (maximum repetition) is not met, repeat the steps from step 5;
- If the condition of stopping the algorithm is met, end the optimization operation and select the best global particle as the optimized PID coefficients.
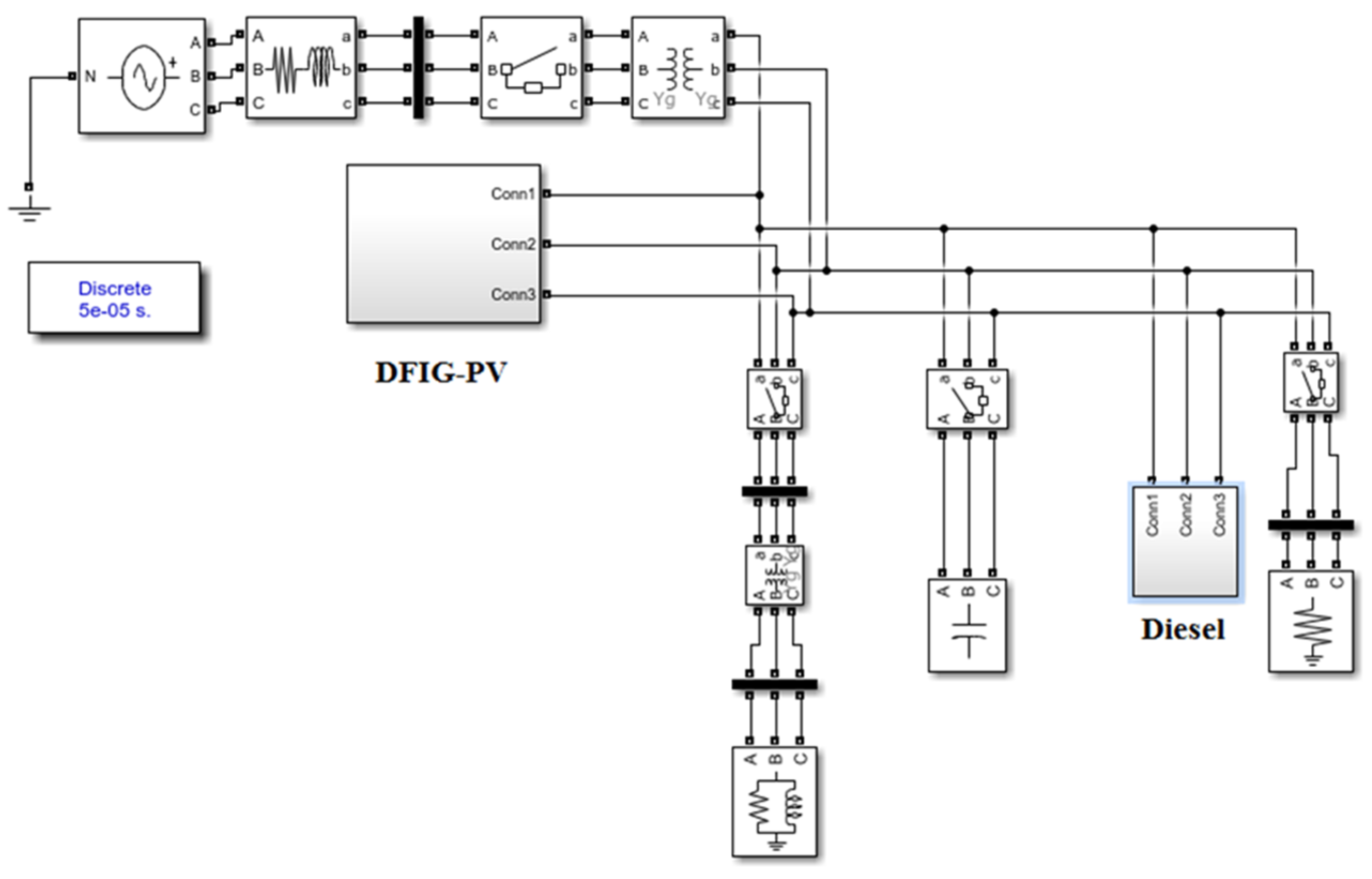
2.9. Studied System
3. Results
- Change the type of controllers;
- Use metaheuristic algorithms for better stability.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Required power | |
| Total production power | |
| Frequency characteristic constant | |
| Damping ratio | |
| Machine inertia | |
| Gain of the diesel generator | |
| Time constant of the diesel generator | |
| Time constant of the governor | |
| Pw | Wind turbine power |
| CP | Wind turbine power coefficient |
| Pitch angle | |
| Tip speed ratio | |
| Blade tip speed in m/s | |
| The wind speed in m/s | |
| Synchronous speed | |
| Electric speed of the generator | |
| Solar radiation in kw/m2 | |
| The conversion efficiency of the solar cell | |
| Gain of the photovoltaic | |
| Time constant of the photovoltaic |
References
- Alayi, R.; Seydnouri, S.; Jahangeri, M.; Maarif, A. Optimization, Sensitivity Analysis, and Techno-Economic Evaluation of a Multi-Source System for an Urban Community: A Case Study. Renew. Energy Res. Appl. 2021. [Google Scholar] [CrossRef]
- Alayi, R.; Ahmadi, M.H.; Visei, A.R.; Sharma, S.; Najafi, A. Technical and environmental analysis of photovoltaic and solar water heater cogeneration system: A case study of Saveh City. Int. J. Low-Carbon Technol. 2021, 16, 447–453. [Google Scholar] [CrossRef]
- Alayi, R.; Khan, M.R.B.; Mohmammadi, M.S.G. Feasibility Study of Grid-Connected PV System for Peak Demand Reduction of a Residential Building in Tehran, Iran. Math. Model. Eng. Probl. 2020, 7, 563–567. [Google Scholar] [CrossRef]
- Karami, A.; Roshani, G.H.; Khazaei, A.; Nazemi, E.; Fallahi, M. Investigation of different sources in order to optimize the nuclear metering system of gas–oil–water annular flows. Neural Comput. Appl. 2018, 32, 3619–3631. [Google Scholar] [CrossRef]
- Katiraei, F.; Iravani, M.R.; Lehn, P.W. Micro-Grid Autonomous Operation During and Subsequent to Islanding Process. IEEE Trans. Power Deliv. 2005, 20, 248–257. [Google Scholar] [CrossRef]
- Alayi, R.; Jahangeri, M.; Monfared, H. Optimal location of electrical generation from urban solid waste for biomass power plants. Anthropog. Pollut. J. 2020, 4, 44–51. [Google Scholar] [CrossRef]
- Roshani, M.; Sattari, M.A.; Ali, P.J.M.; Roshani, G.H.; Nazemi, B.; Corniani, E.; Nazemi, E. Application of GMDH neural network technique to improve measuring precision of a simplified photon attenuation based two-phase flowmeter. Flow Meas. Instrum. 2020, 75, 101804. [Google Scholar] [CrossRef]
- Ali, A.Y.; Basit, A.; Ahmad, T.; Qamar, A.; Iqbal, J. Optimizing coordinated control of distributed energy storage system in microgrid to improve battery life. Comput. Electr. Eng. 2020, 86, 106741. [Google Scholar] [CrossRef]
- Zhao, X.; Lin, Z.; Fu, B.; Gong, S. Research on frequency control method for micro-grid with a hybrid approach of FFR-OPPT and pitch angle of wind turbine. Int. J. Electr. Power Energy Syst. 2021, 127, 106670. [Google Scholar] [CrossRef]
- Javed, A.; Ashraf, J.; Khan, T. The Impact of Renewable Energy on GDP. Int. J. Manag. Sustain. 2020, 9, 239–250. [Google Scholar] [CrossRef]
- Li, P.; Guo, T.; Han, X.; Liu, H.; Yang, J.; Wang, J.; Yang, Y.; Wang, Z. The optimal decentralized coordinated control method based on the H performance index for an AC/DC hybrid microgrid. Int. J. Electr. Power Energy Syst. 2021, 125, 106442. [Google Scholar] [CrossRef]
- Sun, Y.; Wu, X.; Wang, J.; Hou, D.; Wang, S. Power Compensation of Network Losses in a Microgrid with BESS by Distributed Consensus Algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2091–2100. [Google Scholar] [CrossRef]
- Aguilar, M.E.B.; Coury, D.; Reginatto, R.; Monaro, R.M. Multi-objective PSO applied to PI control of DFIG wind turbine under electrical fault conditions. Electr. Power Syst. Res. 2020, 180, 106081. [Google Scholar] [CrossRef]
- Jia, Y.; Huang, T.; Li, Y.; Ma, R. Parameter Setting Strategy for the Controller of the DFIG Wind Turbine Considering the Small-Signal Stability of Power Grids. IEEE Access 2020, 8, 31287–31294. [Google Scholar] [CrossRef]
- Ahmed, M.M.; Hassanein, W.S.; Elsonbaty, N.A.; Enany, M.A. Proposing and evaluation of MPPT algorithms for high-performance stabilized WIND turbine driven DFIG. Alex. Eng. J. 2020, 59, 5135–5146. [Google Scholar] [CrossRef]
- Prajapat, G.P.; Senroy, N.; Kar, I. Estimation based enhanced maximum energy extraction scheme for DFIG-wind turbine systems. Sustain. Energy Grids Netw. 2021, 26, 100419. [Google Scholar] [CrossRef]
- Shahidehpour, M.; Khodayar, M. Cutting Campus Energy Costs with Hierarchical Control: The Economical and Reliable Operation of a Microgrid. IEEE Electrif. Mag. 2013, 1, 40–56. [Google Scholar] [CrossRef]
- Che, L.; Shahidehpour, M. DC Microgrids: Economic Operation and Enhancement of Resilience by Hierarchical Control. IEEE Trans. Smart Grid 2014, 5, 2517–2526. [Google Scholar] [CrossRef]
- Hassan, M.; Aleem, S.H.E.A.; Ali, S.G.; Abdelaziz, A.Y.; Ribeiro, P.F.; Ali, Z.M. Robust Energy Management and Economic Analysis of Microgrids Considering Different Battery Characteristics. IEEE Access 2020, 8, 54751–54775. [Google Scholar] [CrossRef]
- Rawa, M.; Abusorrah, A.; Al-Turki, Y.; Mekhilef, S.; Mostafa, M.H.; Ali, Z.M.; Aleem, S.H.E.A. Optimal Allocation and Economic Analysis of Battery Energy Storage Systems: Self-Consumption Rate and Hosting Capacity Enhancement for Microgrids with High Renewable Penetration. Sustainability 2020, 12, 10144. [Google Scholar] [CrossRef]
- Verma, P.; Gupta, P. Proactive stabilization of grid faults in DFIG based wind farm using bridge type fault current limiter based on NMPC. Energy Sources Part A Recover. Util. Environ. Eff. 2020, 1–20. [Google Scholar] [CrossRef]
- Mohssine, C.; Nasser, T.; Essadki, A. Contribution of Variable Speed Wind Turbine Generator based on DFIG using ADRC and RST Controllers to Frequency Regulation. Int. J. Renew. Energy Res. (IJRER) 2021, 11, 320–331. [Google Scholar]
- Ribó-Pérez, D.; Bastida-Molina, P.; Gómez-Navarro, T.; Hurtado-Pérez, E. Hybrid assessment for a hybrid microgrid: A novel methodology to critically analyse generation technologies for hybrid microgrids. Renew. Energy 2020, 157, 874–887. [Google Scholar] [CrossRef]
- Sadat, S.A.; Faraji, J.; Babaei, M.; Ketabi, A. Techno-economic comparative study of hybrid microgrids in eight climate zones of Iran. Energy Sci. Eng. 2020, 8, 3004–3026. [Google Scholar] [CrossRef]
- Borghei, M.; Ghassemi, M. Optimal planning of microgrids for resilient distribution networks. Int. J. Electr. Power Energy Syst. 2021, 128, 106682. [Google Scholar] [CrossRef]
- Parol, M.; Wójtowicz, T.; Księżyk, K.; Wenge, C.; Balischewski, S.; Arendarski, B. Optimum management of power and energy in low voltage microgrids using evolutionary algorithms and energy storage. Int. J. Electr. Power Energy Syst. 2020, 119, 105886. [Google Scholar] [CrossRef]
- Zhou, Q.; Shahidehpour, M.; Paaso, A.; Bahramirad, S.; Alabdulwahab, A.; Abusorrah, A. Distributed Control and Communication Strategies in Networked Microgrids. IEEE Commun. Surv. Tutor. 2020, 22, 2586–2633. [Google Scholar] [CrossRef]
- Zhou, B.; Zou, J.; Chung, C.Y.; Wang, H.; Liu, N.; Voropai, N.; Xu, D. Multi-microgrid Energy Management Systems: Architecture, Communication, and Scheduling Strategies. J. Mod. Power Syst. Clean Energy 2021, 9, 463–476. [Google Scholar] [CrossRef]
- Mohamed, N.; Aymen, F.; Ali, Z.; Zobaa, A.; Aleem, S.A. Efficient Power Management Strategy of Electric Vehicles Based Hybrid Renewable Energy. Sustainability 2021, 13, 7351. [Google Scholar] [CrossRef]
- Bevrani, H.; Habibi, F.; Babahajyani, P.; Watanabe, M.; Mitani, Y. Intelligent Frequency Control in an AC Micro grid:Online PSO-Based Fuzzy Tuning Approach. IEEE Trans. Smart Grid 2012, 3, 1935–1944. [Google Scholar] [CrossRef]
- Li, X.; Song, Y.J.; Han, S.B. Frequency control in micro grid power system combined with electrolyzer system and fuzzy PI controller. J. Power Sources 2018, 180, 468–475. [Google Scholar] [CrossRef]
- Mahmoudi, M.; Jafari, H.; Jafari, R. Frequency control of Micro-grid Using State Feedback with Integral Control. In Proceedings of the 20th Conference on Electrical Power Distribution Networks Conference (EPDC), Zahedan, Iran, 28–29 April 2015. [Google Scholar]
- Mauricio, J.M.; Marano, A.; Gómez-Expósito, A.; Ramos, J.L. Frequency Regulation Contribution Through Variable-Speed Wind Energy Conversion Systems. IEEE Trans. Power Syst. 2009, 24, 173–180. [Google Scholar] [CrossRef]
- Morren, J.; de Haan, S.W.H.; Kling, W.L.; Ferreira, J.A. Wind Turbines Emulating Inertia and Supporting Primary Frequency Control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Ahmadi, R.; Sheikholeslami, A.; Nabavi Niaki, A.; Ranjbar, A. Dynamic participation of doubly fed induction generator in multi-area load frequecy control. Int. Trans. Electr. Energy Syst. 2015, 25, 1130–1147. [Google Scholar] [CrossRef]
- Alayi, R.; Zishan, F.; Mohkam, M.; Hoseinzadeh, S.; Memon, S.; Garcia, D. A Sustainable Energy Distribution Configuration for Microgrids Integrated to the National Grid Using Back-to-Back Converters in a Renewable Power System. Electronics 2021, 10, 1826. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Xiao, J. Differential Evolution-Based Load Frequency Robust Control for Micro-Grids with Energy Storage Systems. Energies 2018, 11, 1686. [Google Scholar] [CrossRef] [Green Version]
- Stadler, M.; Siddiqui, A.; Marnay, C.; Aki, H.; Lai, J. Control of greenhouse gas emissions by optimal DER technology investment and energy management in zero-net-energy buildings. Eur. Trans. Electr. Power 2011, 21, 1291–1309. [Google Scholar] [CrossRef] [Green Version]
- Bhatt, P.; Roy, R.; Ghoshal, S. Dynamic participation of doubly fed induction generator in automatic generation control. Renew. Energy 2011, 36, 1203–1213. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Gain | Kp | Ki | Kd |
|---|---|---|---|
| Value | 1.16 | 14.32 | 18.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alayi, R.; Zishan, F.; Seyednouri, S.R.; Kumar, R.; Ahmadi, M.H.; Sharifpur, M. Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV. Sustainability 2021, 13, 10728. https://doi.org/10.3390/su131910728
Alayi R, Zishan F, Seyednouri SR, Kumar R, Ahmadi MH, Sharifpur M. Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV. Sustainability. 2021; 13(19):10728. https://doi.org/10.3390/su131910728
Chicago/Turabian StyleAlayi, Reza, Farhad Zishan, Seyed Reza Seyednouri, Ravinder Kumar, Mohammad Hossein Ahmadi, and Mohsen Sharifpur. 2021. "Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV" Sustainability 13, no. 19: 10728. https://doi.org/10.3390/su131910728
APA StyleAlayi, R., Zishan, F., Seyednouri, S. R., Kumar, R., Ahmadi, M. H., & Sharifpur, M. (2021). Optimal Load Frequency Control of Island Microgrids via a PID Controller in the Presence of Wind Turbine and PV. Sustainability, 13(19), 10728. https://doi.org/10.3390/su131910728