
Model Predictive Control of the Input Current and Output Voltage of a Matrix Converter as a Ground Power Unit for Airplane Servicing




Abstract
:1. Introduction
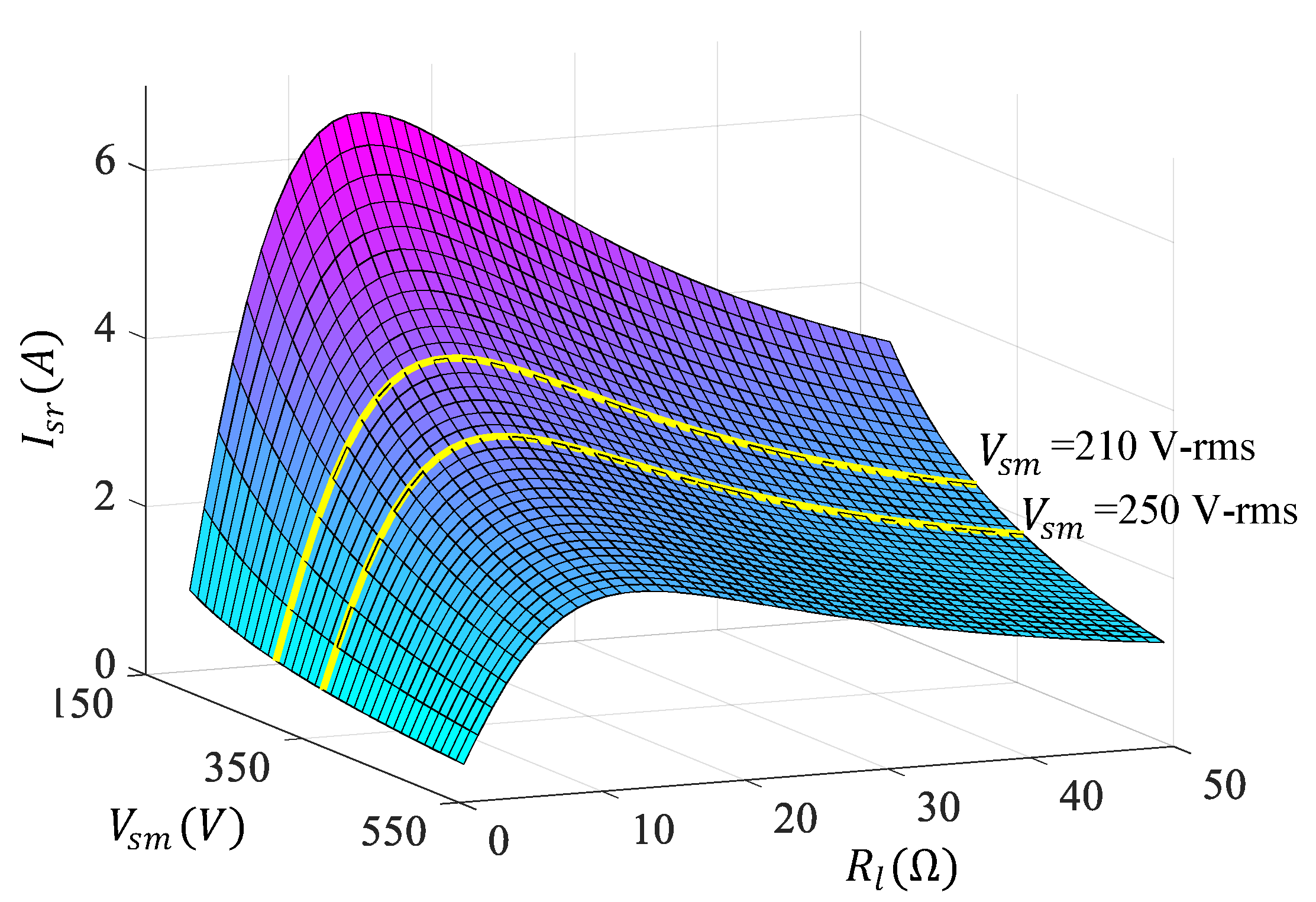
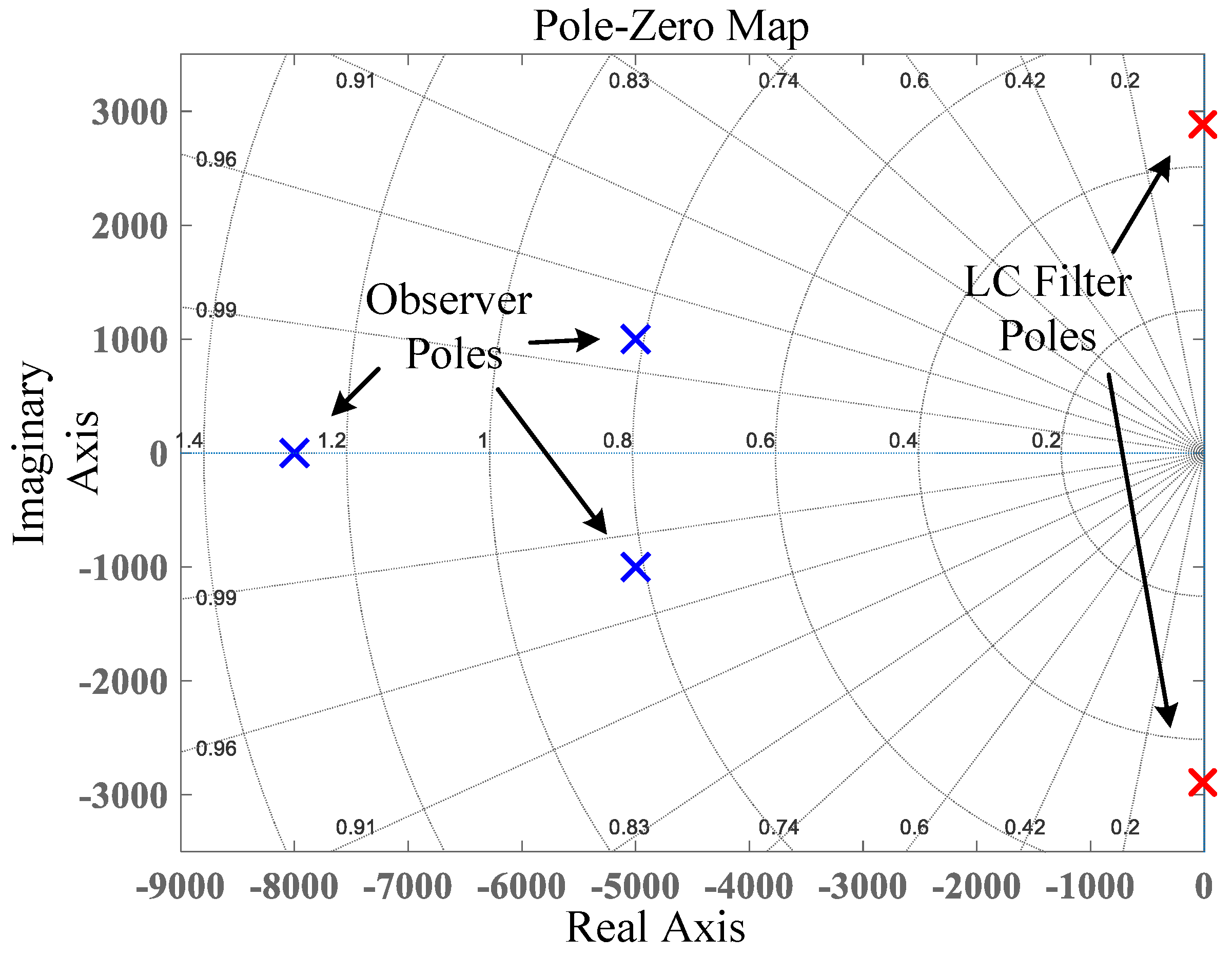
2. System Stabilization
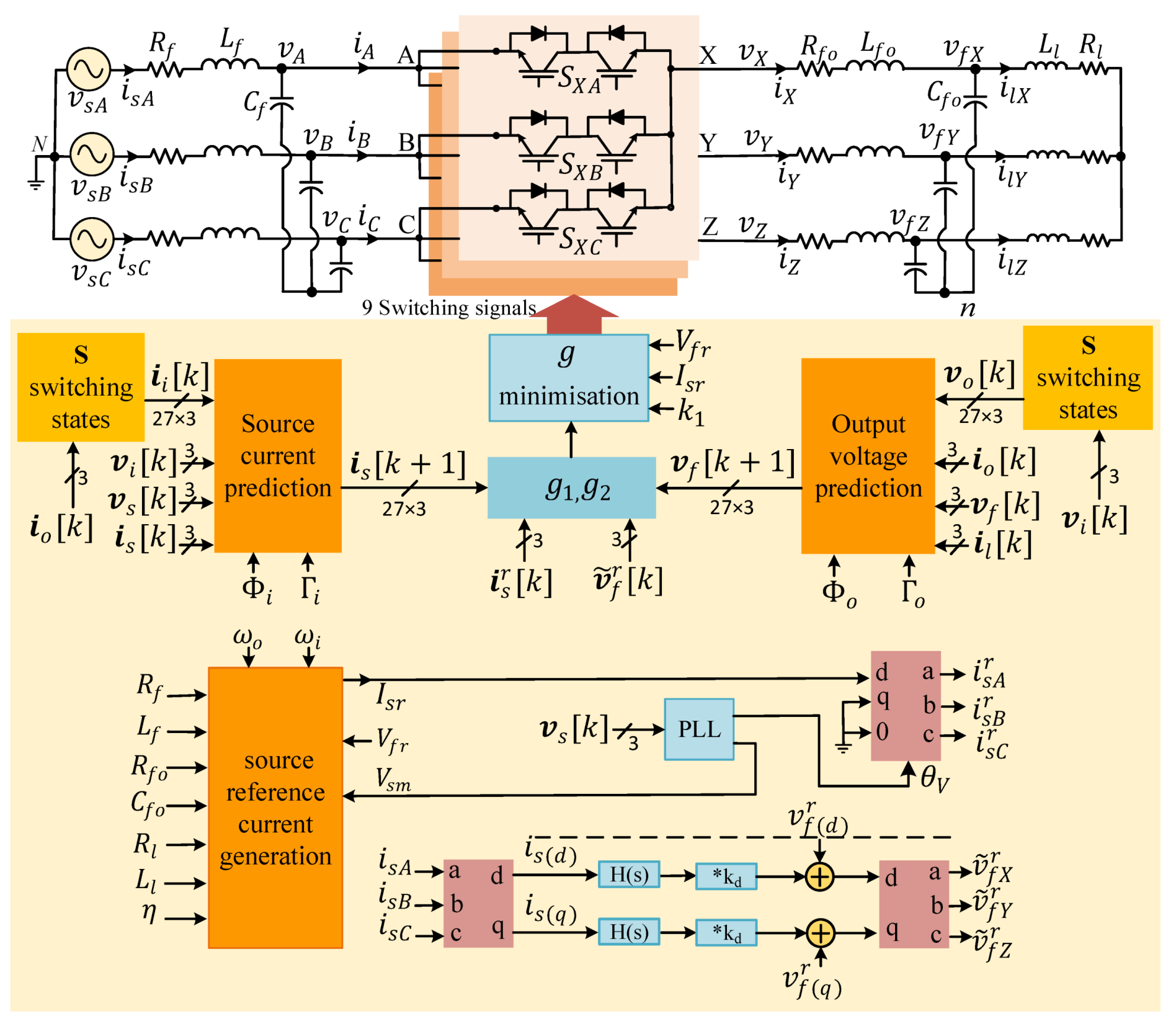
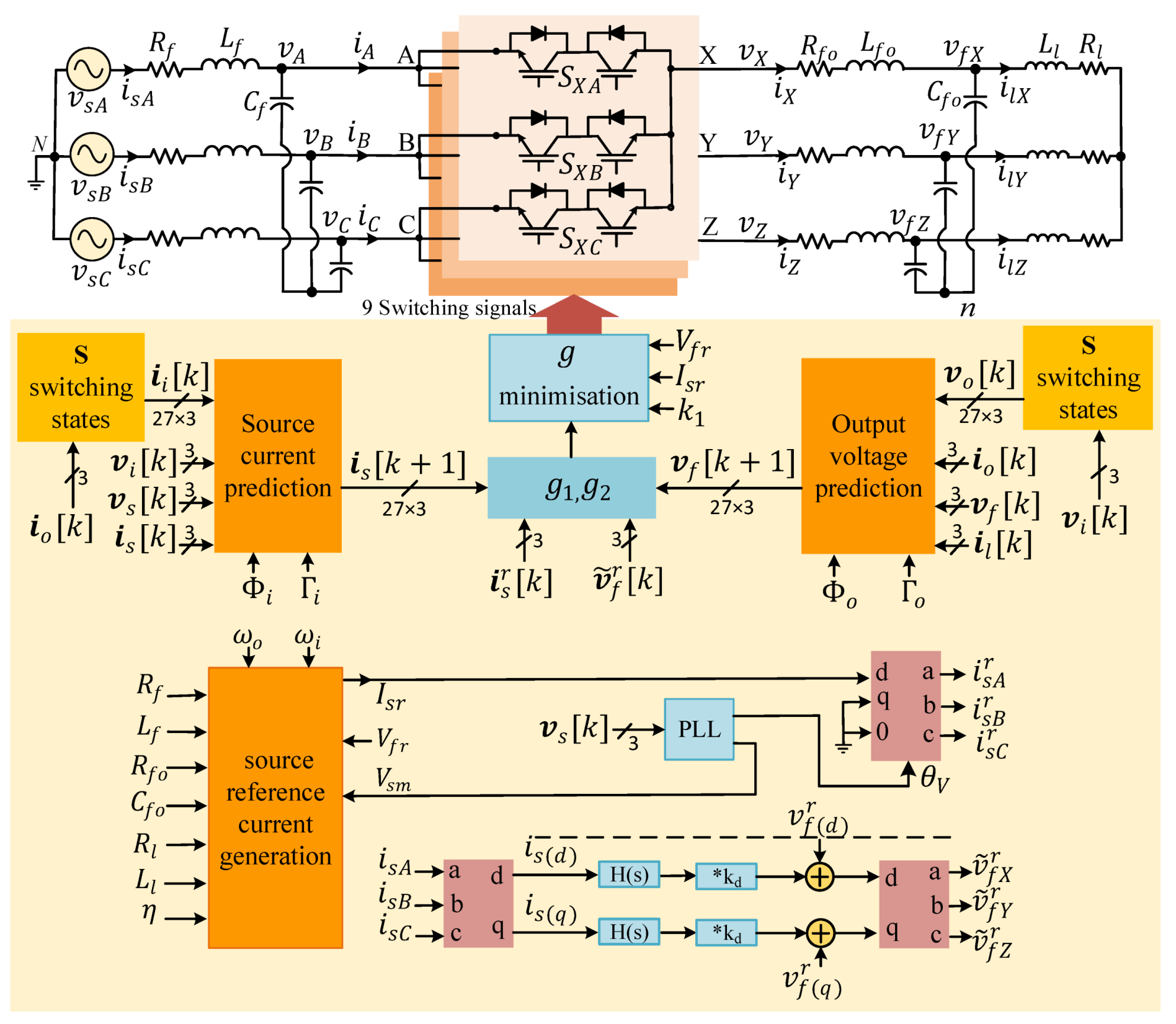
3. Proposed Control Scheme
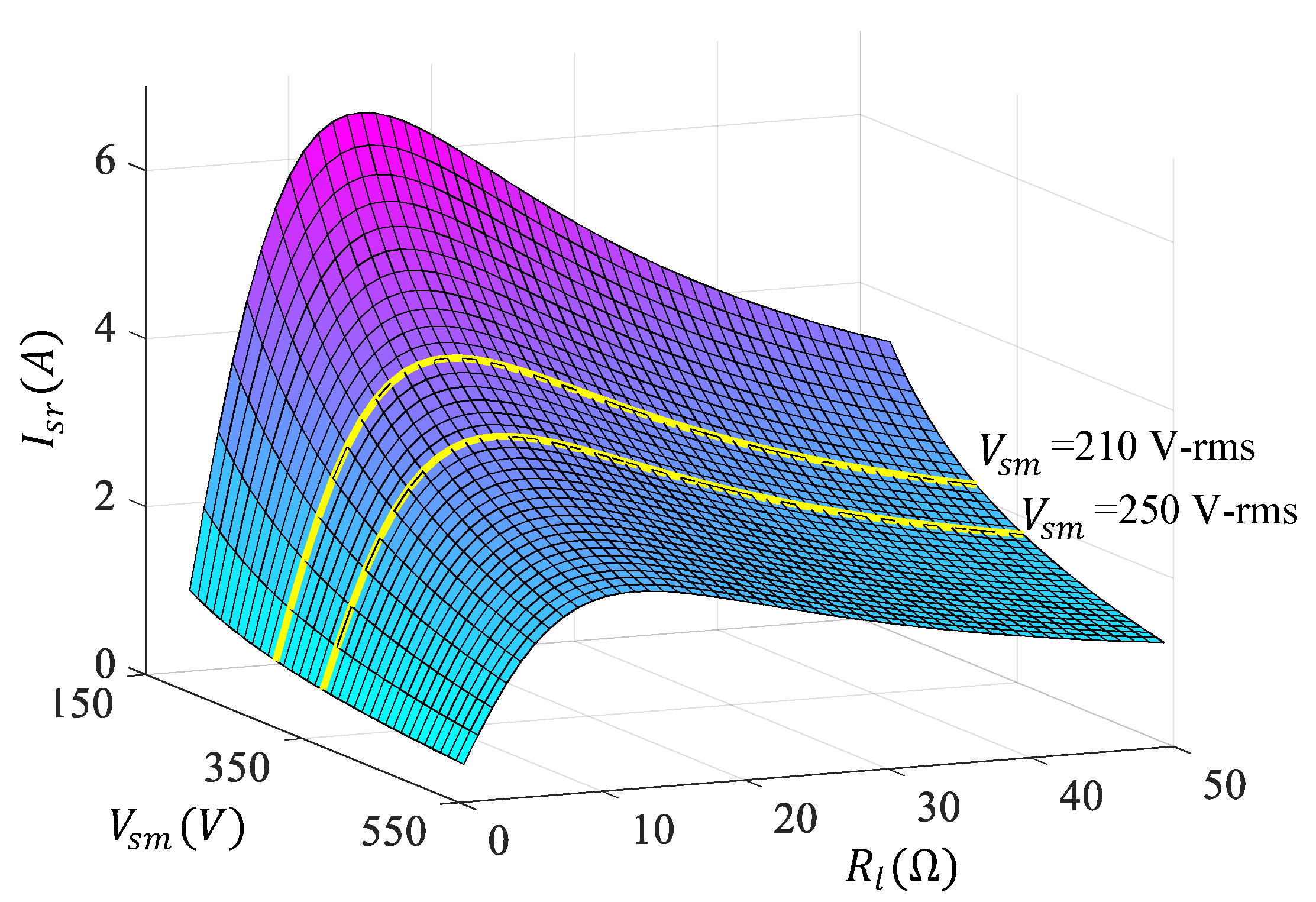
3.1. Input Current Control
3.2. Modeling and Control of the Output Voltage
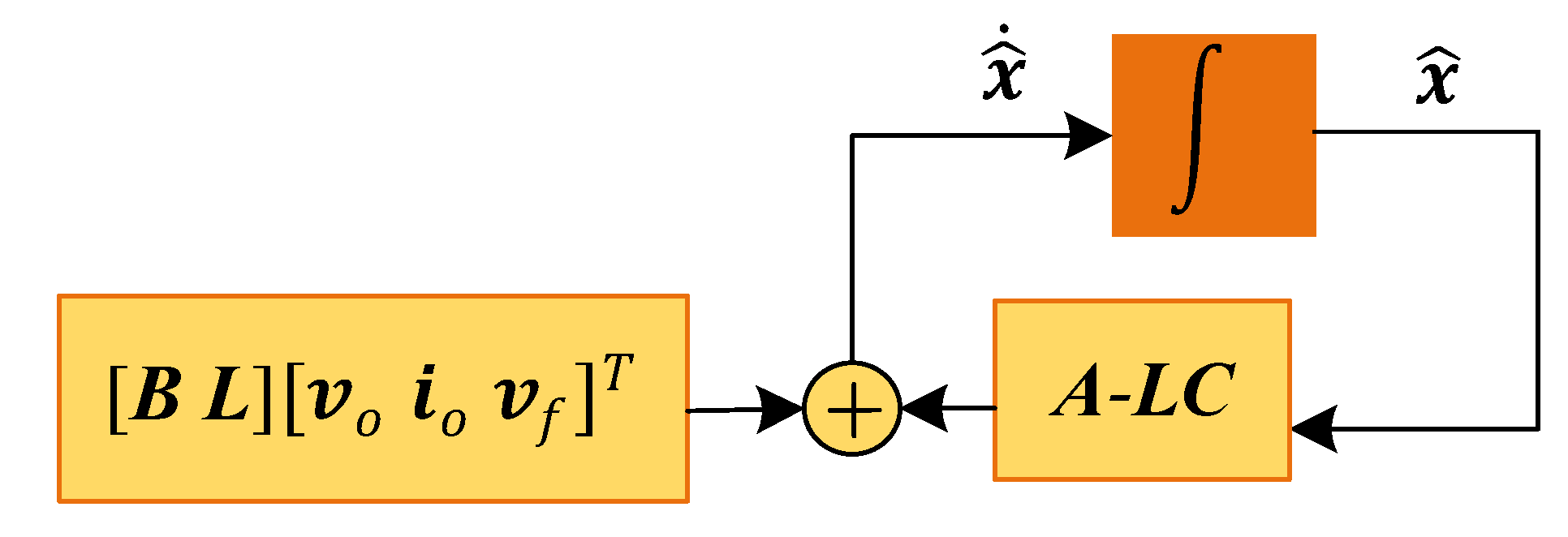
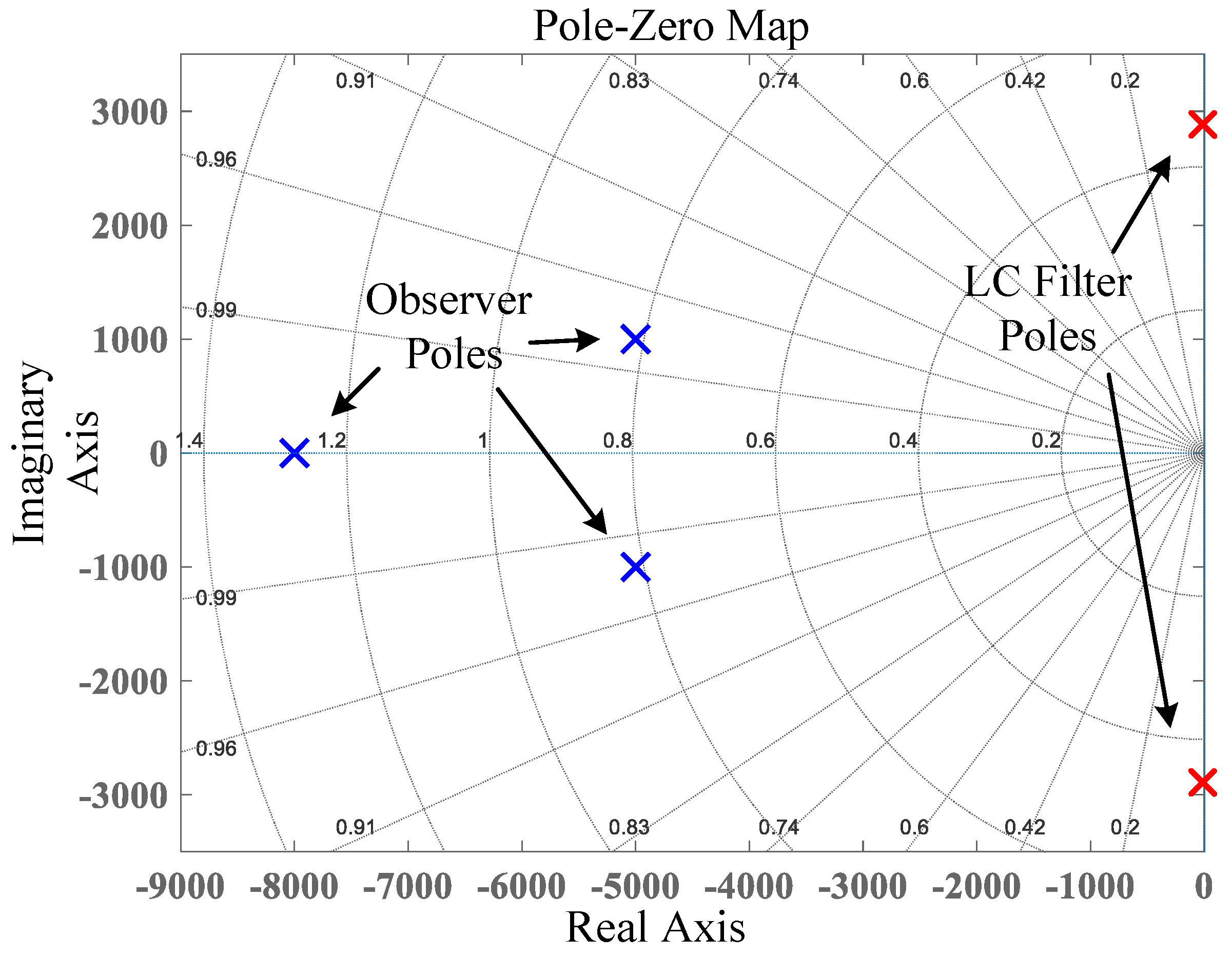
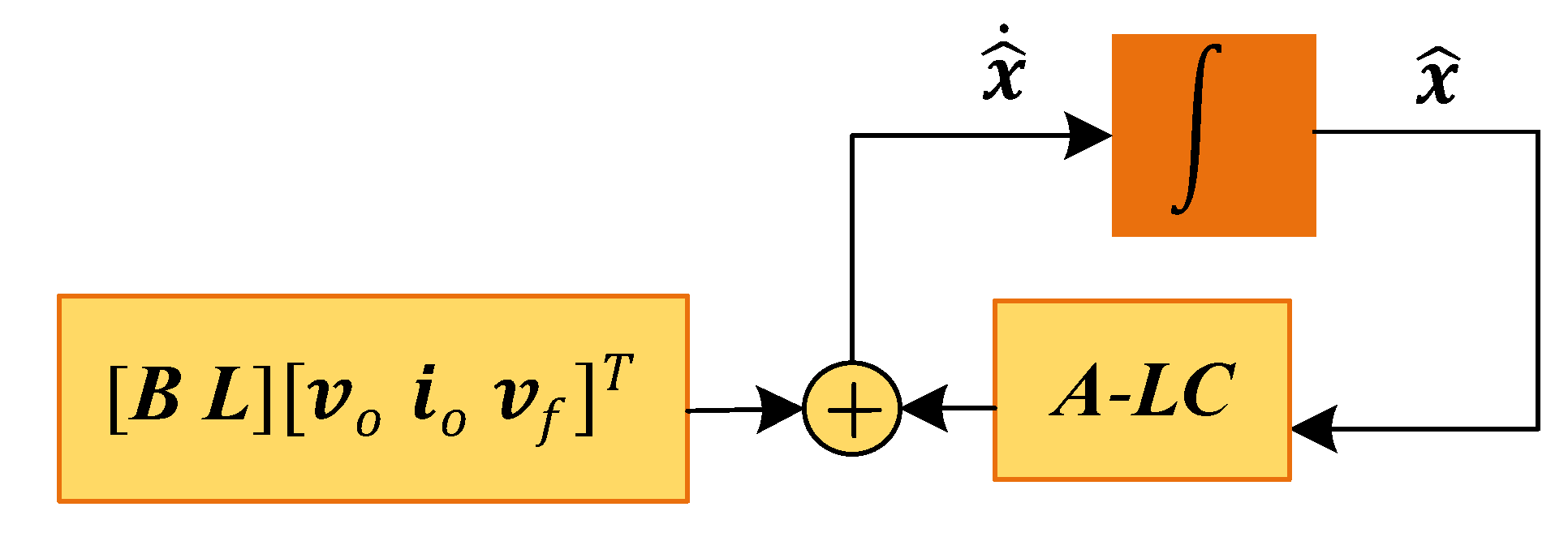
3.3. Load-Current Observer
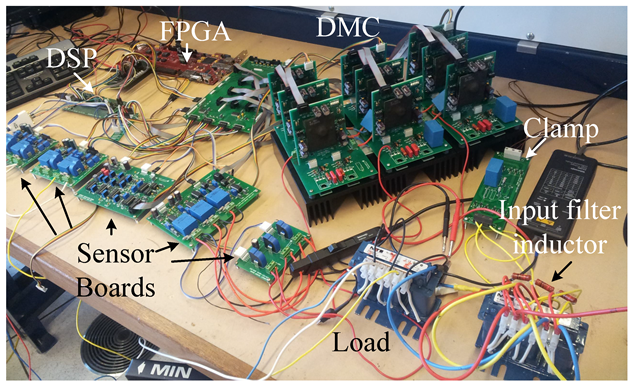
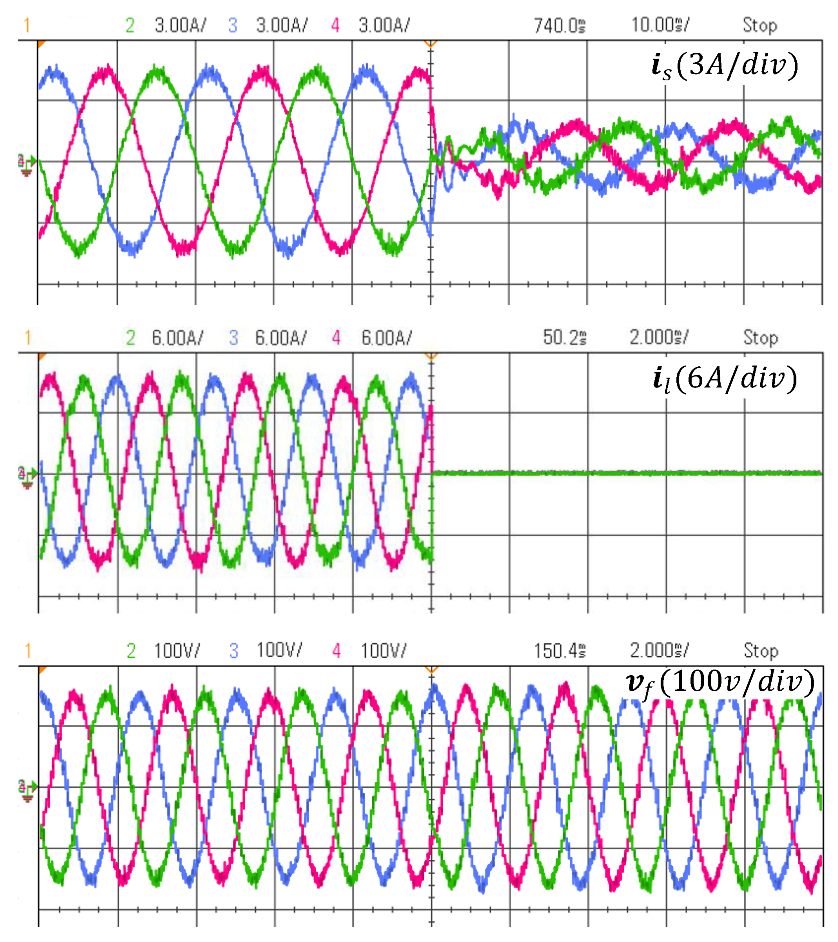
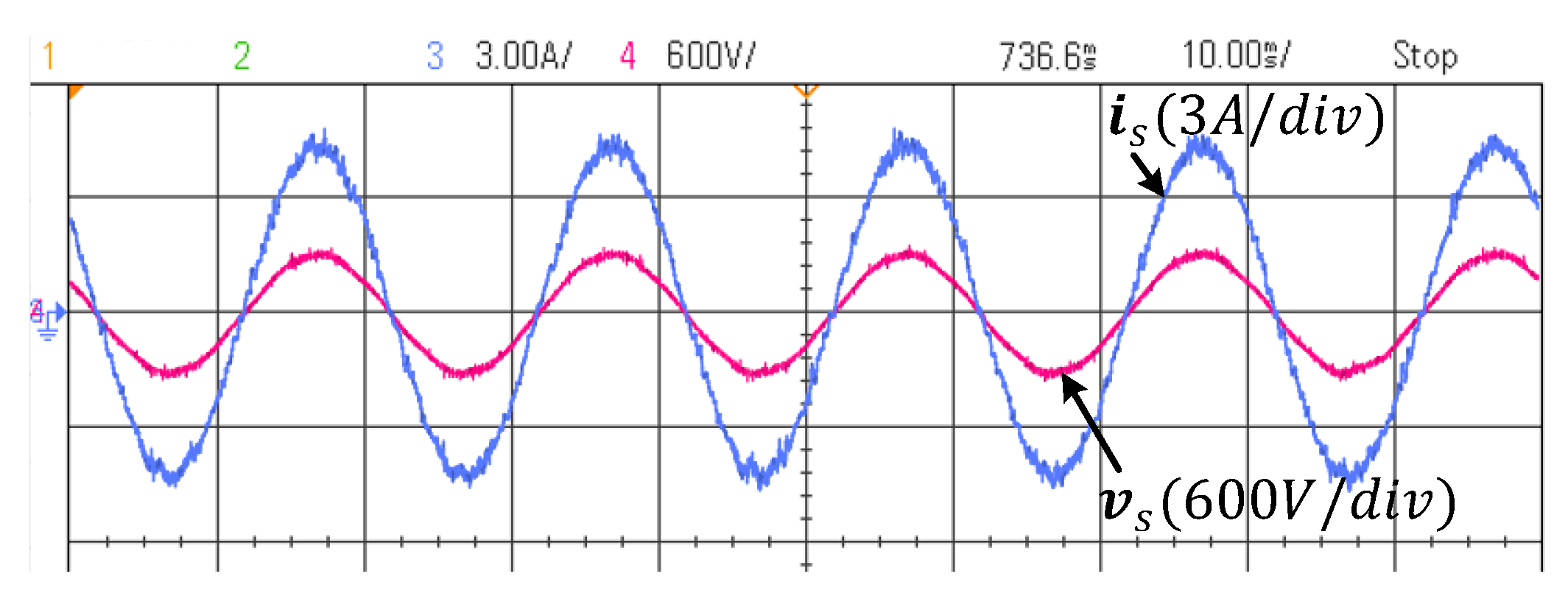
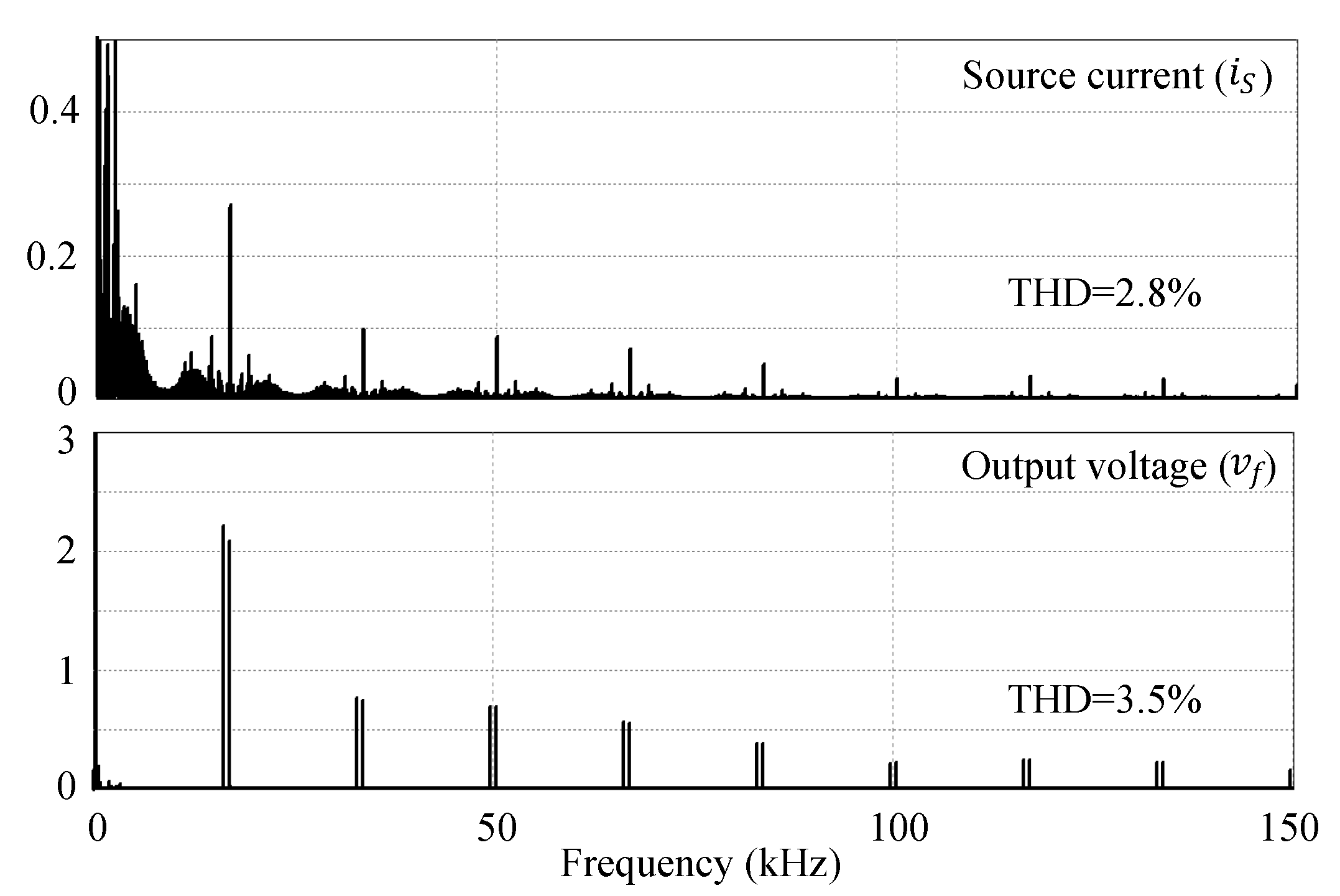
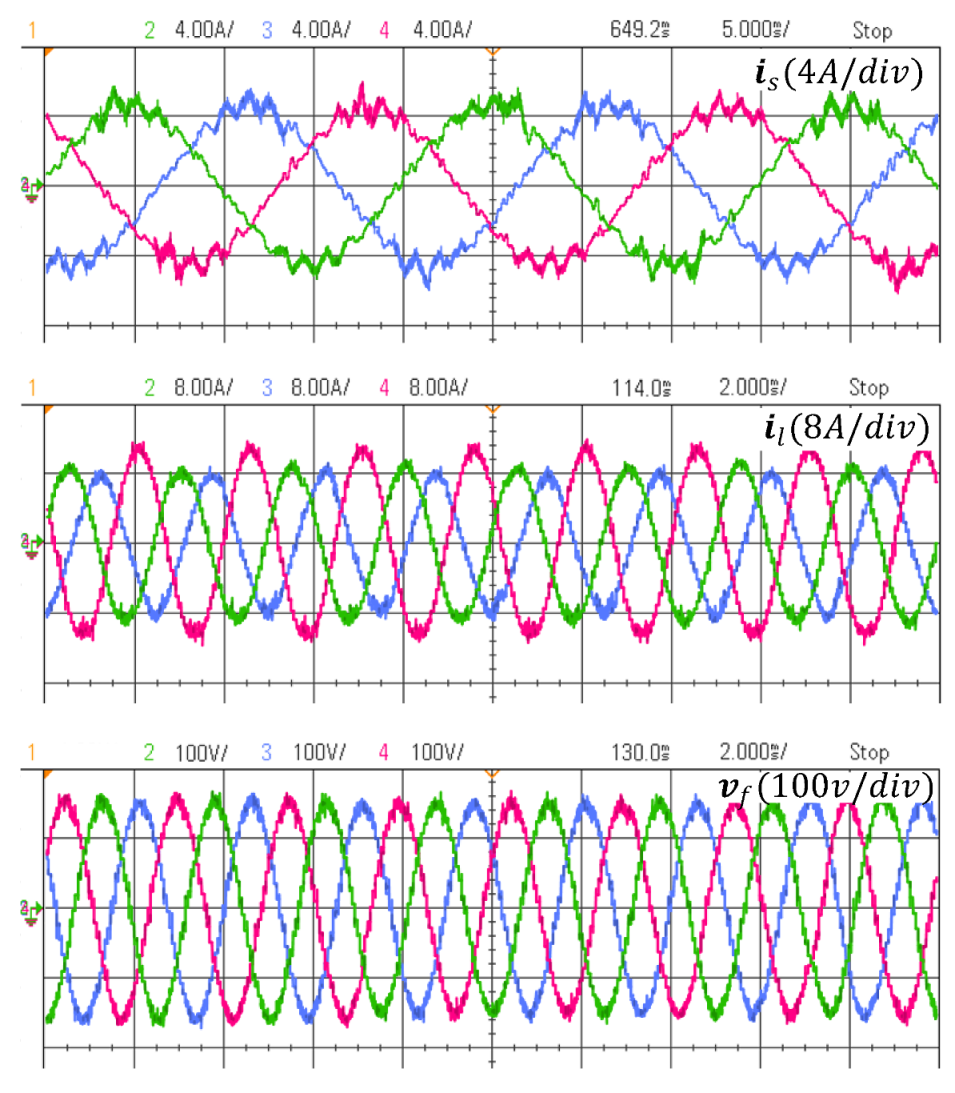
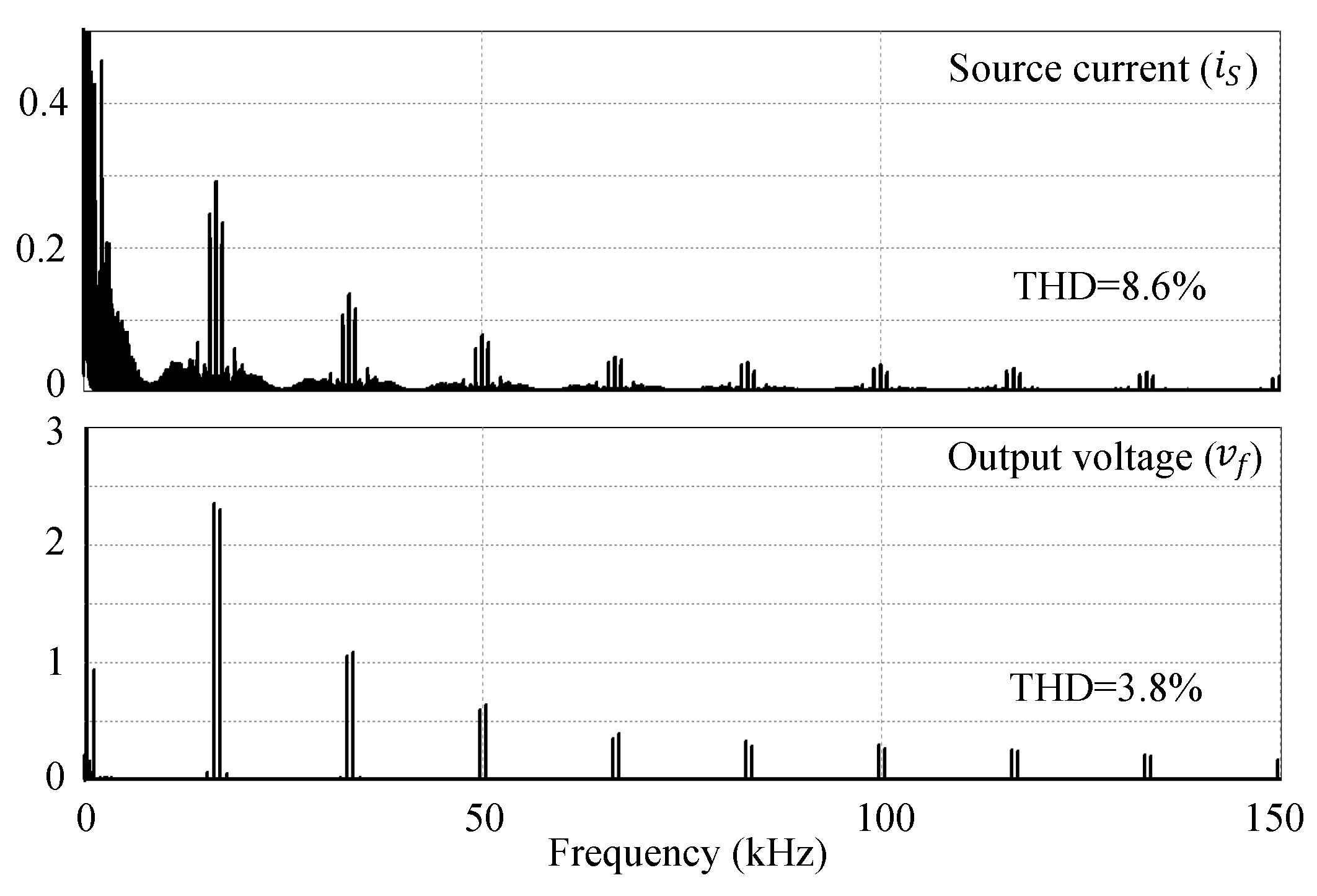
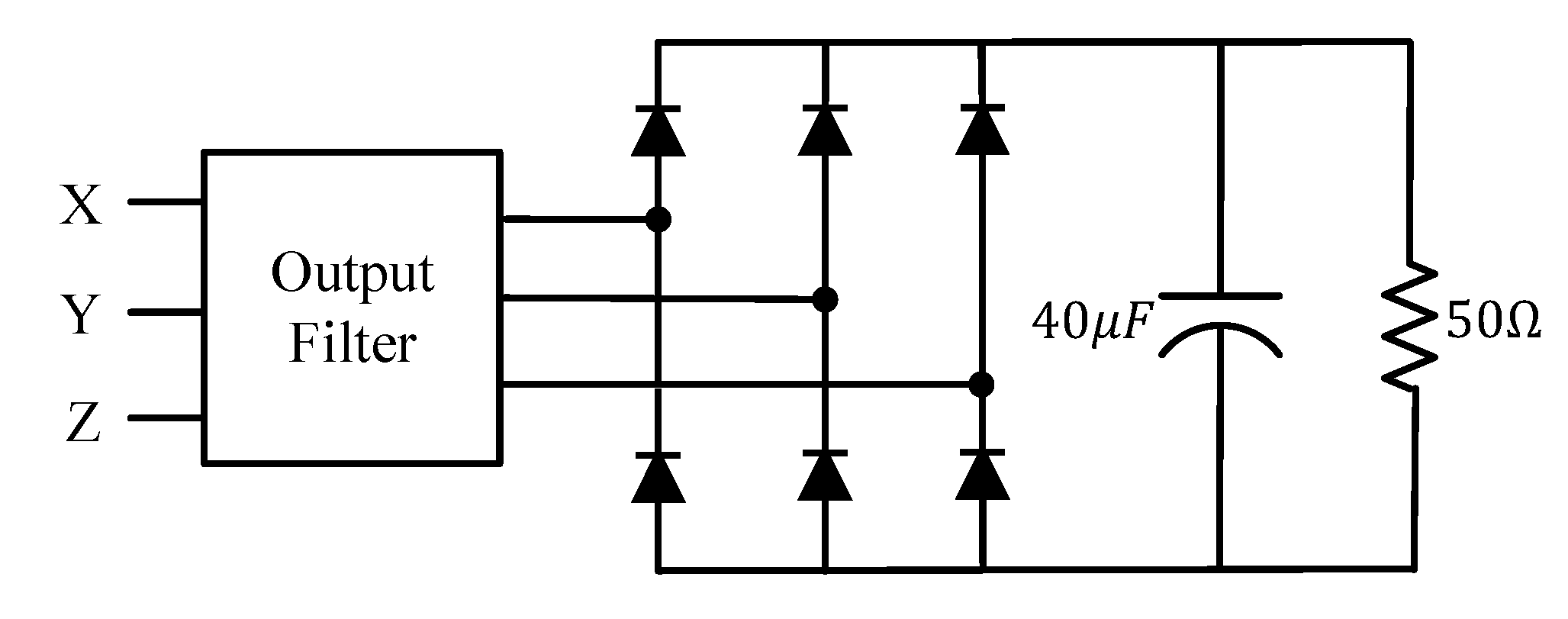
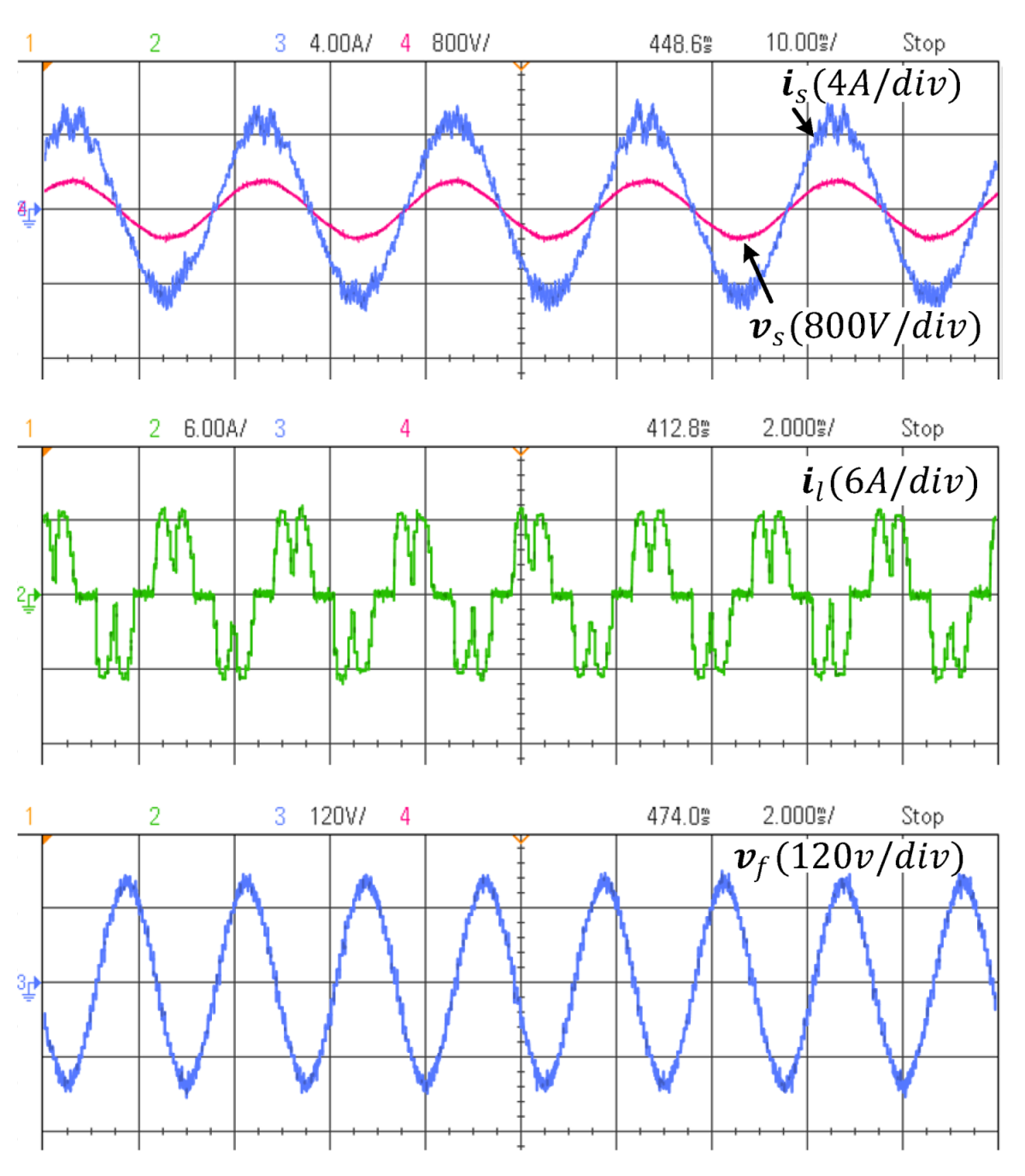
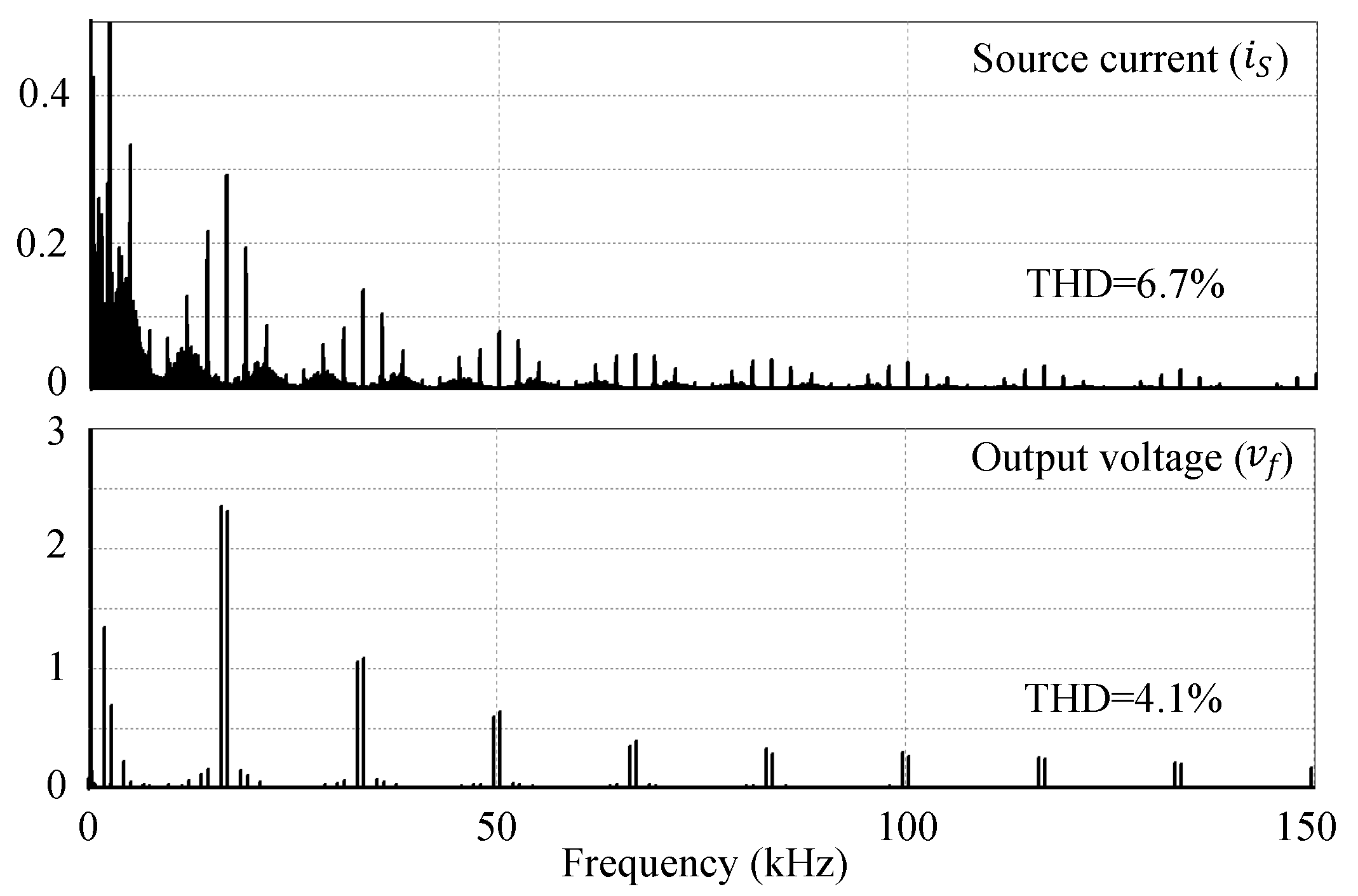
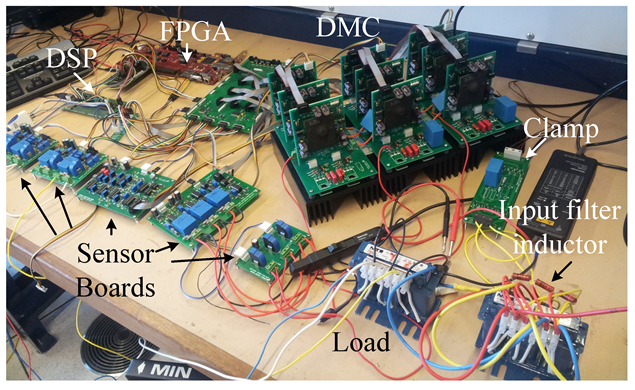
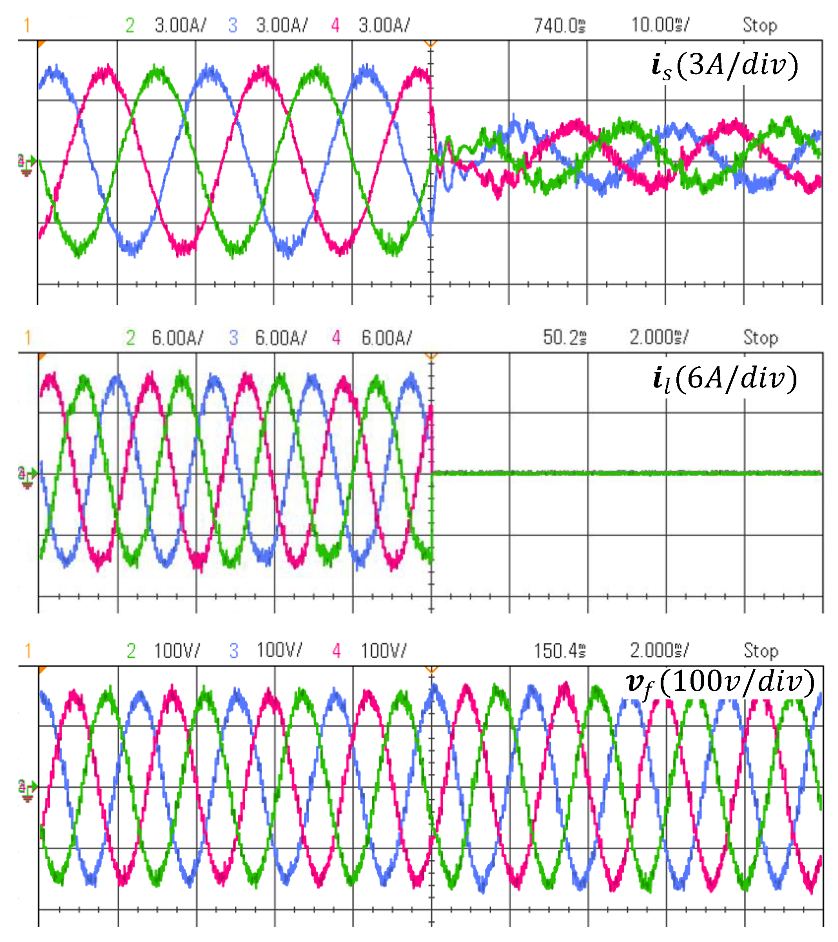
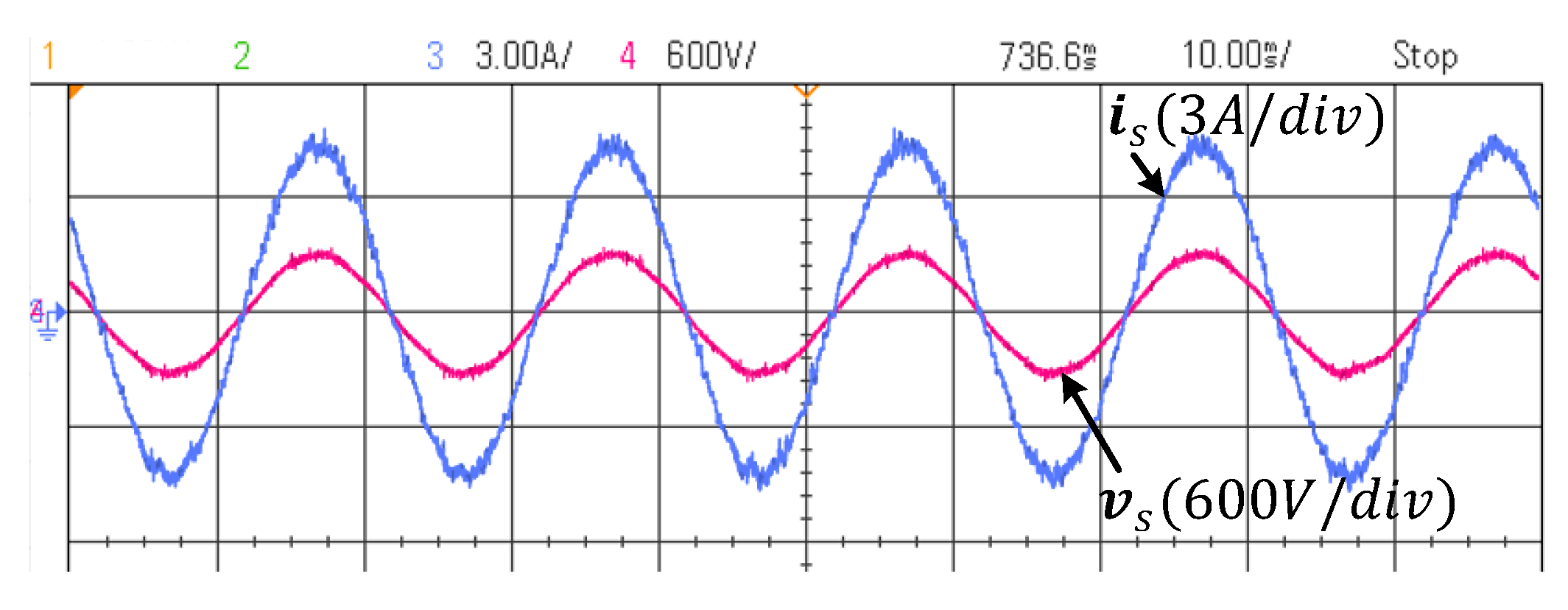
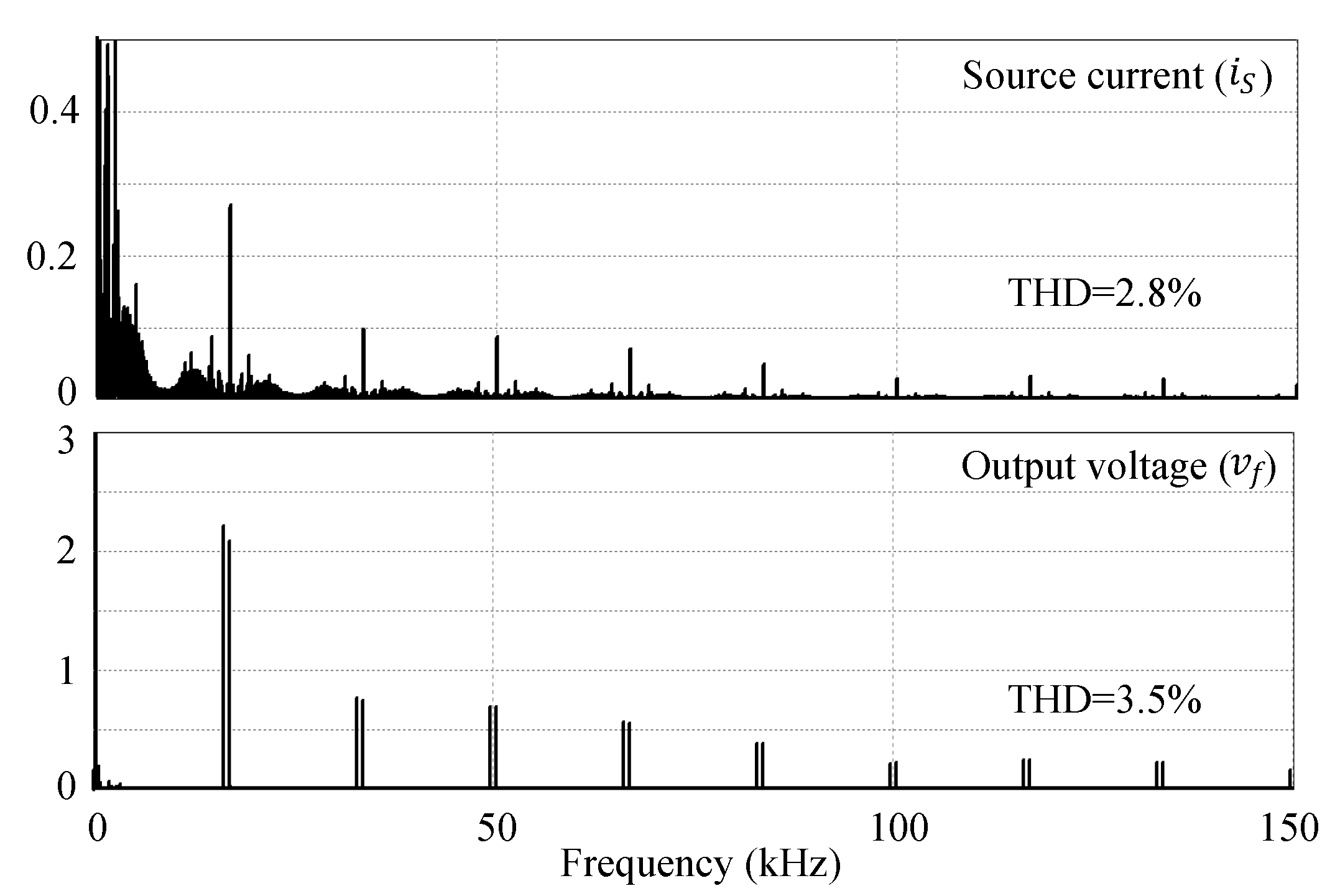
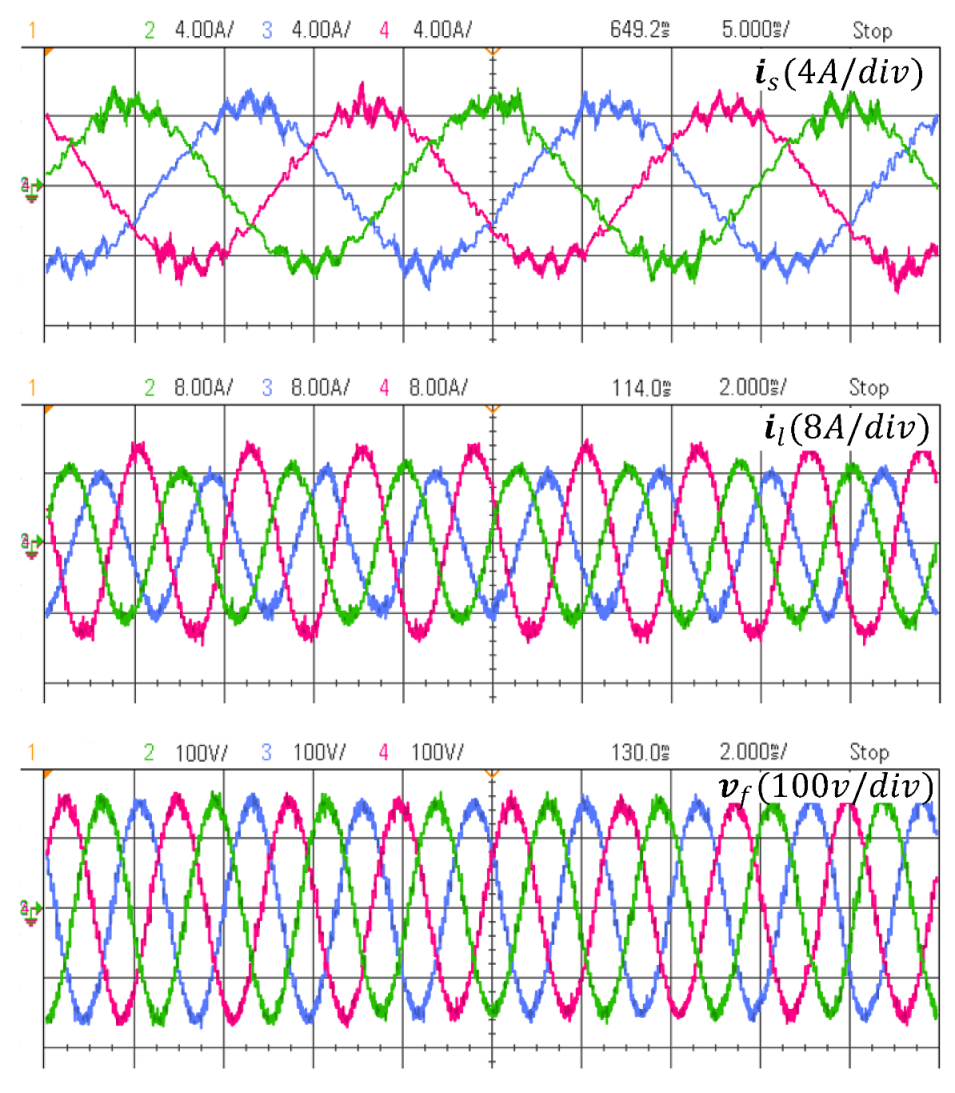
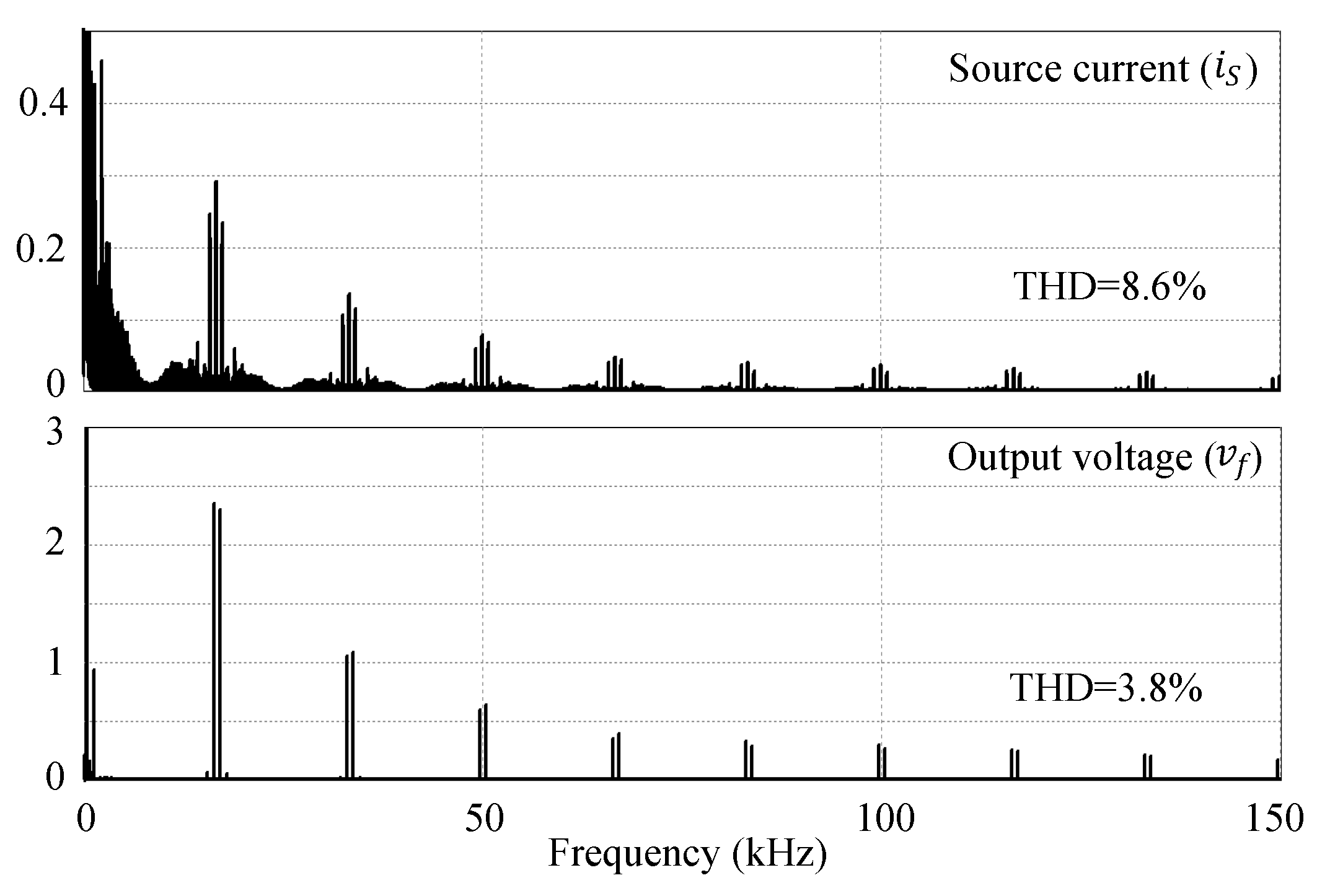
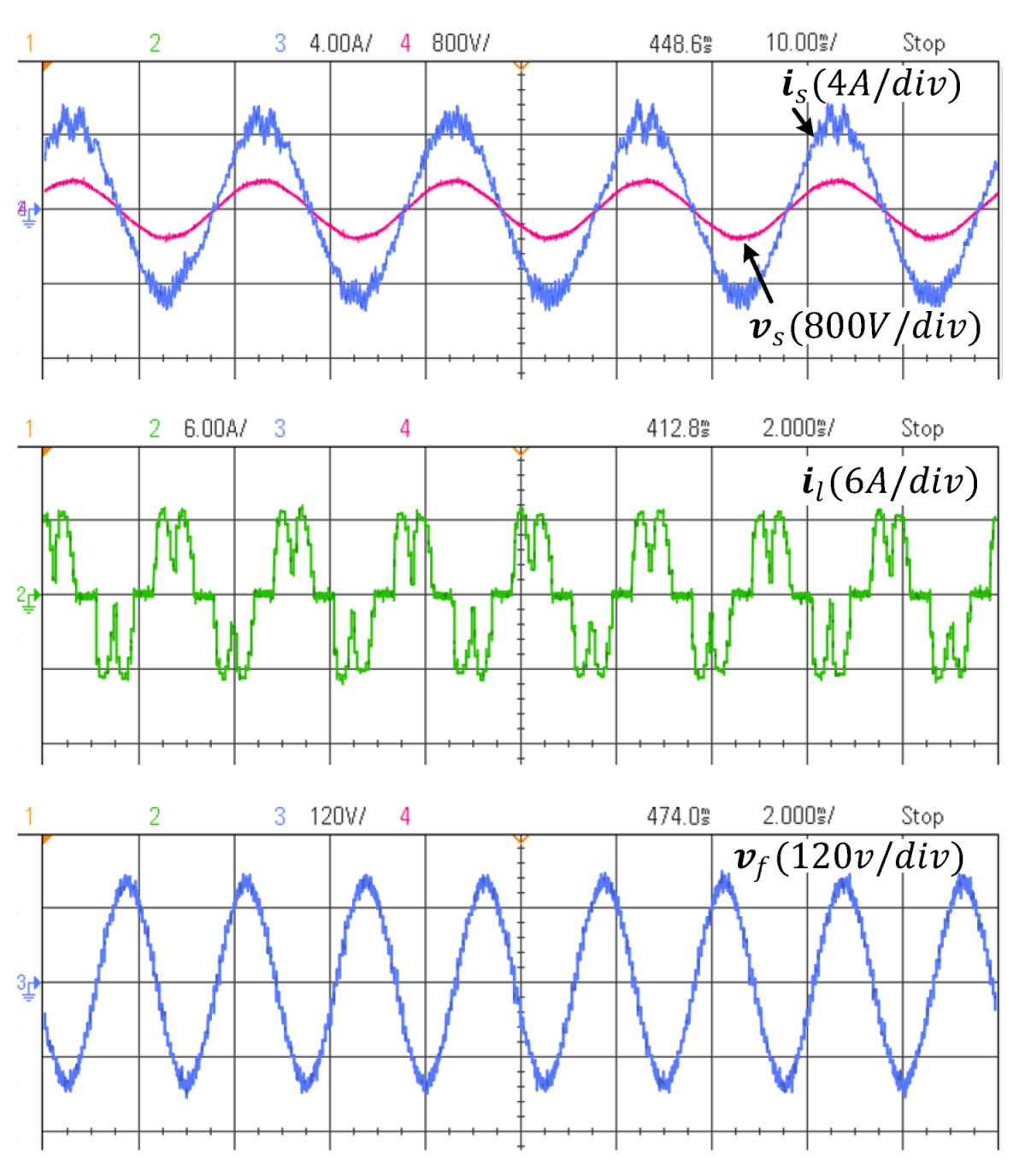
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rojas, F.; Cardenas, R.; Clare, J.; Diaz, M.; Pereda, J.; Kennel, R. A Design Methodology of Multiresonant Controllers for High Performance 400 Hz Ground Power Units. IEEE Trans. Ind. Electron. 2019, 66, 6549–6559. [Google Scholar] [CrossRef]
- Li, Z.; Li, Y.; Wang, P.; Zhu, H.; Liu, C.; Gao, F. Single-Loop Digital Control of High-Power 400-Hz Ground Power Unit for Airplanes. IEEE Trans. Ind. Electron. 2010, 57, 532–543. [Google Scholar]
- Vazquez, S.; Marquez, A.; Leon, J.I.; Franquelo, L.G.; Geyer, T. FCS-MPC and observer design for a VSI with output LC filter and sinusoidal output currents. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 677–682. [Google Scholar] [CrossRef]
- Malekjamshidi, Z.; Jafari, M.; Zhu, J.; Rivera, M. Design, Implementation, and Stability Analysis of a Space Vector Modulated Direct Matrix Converter for Power Flow Control in a More Reliable and Sustainable Microgrid. Sustainability 2020, 12, 8591. [Google Scholar] [CrossRef]
- Varajão, D.; Araújo, R.E. Modulation Methods for Direct and Indirect Matrix Converters: A Review. Electronics 2021, 10, 812. [Google Scholar] [CrossRef]
- Ammar, A.; Kanaan, H.Y.; Moubayed, N.; Hamouda, M.; Al-Haddad, K. Original Approach Toward Three-Phase Indirect Matrix Converters Through Hybrid PWM Modulation and DSP Implementation. IEEE Access 2020, 8, 45837–45852. [Google Scholar] [CrossRef]
- Zanchetta, P.; Wheeler, P.W.; Clare, J.C.; Bland, M.; Empringham, L.; Katsis, D. Control Design of a Three-Phase Matrix-Converter-Based AC-AC Mobile Utility Power Supply. IEEE Trans. Ind. Electron. 2008, 55, 209–217. [Google Scholar] [CrossRef]
- Wheeler, P.W.; Zanchetta, P.; Clare, J.C.; Empringham, L.; Bland, M.; Katsis, D. A Utility Power Supply Based on a Four-Output Leg Matrix Converter. IEEE Trans. Ind. Appl. 2008, 44, 174–186. [Google Scholar] [CrossRef]
- Katsis, D.; Wheeler, P.; Clare, J.; Zanchetta, P. A three-phase utility power supply based on the matrix converter. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; Volume 3, pp. 1447–1451. [Google Scholar] [CrossRef]
- Arevalo, S.L.; Zanchetta, P.; Wheeler, P.W.; Trentin, A.; Empringham, L. Control and Implementation of a Matrix-Converter-Based AC Ground Power-Supply Unit for Aircraft Servicing. IEEE Trans. Ind. Electron. 2010, 57, 2076–2084. [Google Scholar] [CrossRef]
- Arevalo, S.L.; Zanchetta, P.; Wheeler, P.W. Control of a Matrix Converter-based AC Power Supply for Aircrafts under Unbalanced Conditions. In Proceedings of the IECON 2007-33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1823–1828. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter With Output LC Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J. Three-phase inverter with output LC filter using predictive control for UPS applications. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Yusoff, S.; De Lillo, L.; Zanchetta, P.; Wheeler, P. Predictive Control of a direct AC/AC matrix converter power supply under non-linear load conditions. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. DS3c.4-1–DS3c.4-6. [Google Scholar] [CrossRef]
- Yusoff, S.; De Lillo, L.; Zanchetta, P.; Wheeler, P.; Cortés, P.; Rodríguez, J. Predictive control of a direct AC/AC matrix converter for power supply applications. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Dorrell, D.G.; Norambuena, M.; Rodriguez, J. Predictive Voltage Control of Direct Matrix Converters With Improved Output Voltage for Renewable Distributed Generation. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 296–308. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Emadi, A. Active Damping in DC/DC Power Electronic Converters: A Novel Method to Overcome the Problems of Constant Power Loads. IEEE Trans. Ind. Electron. 2009, 56, 1428–1439. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.H.; Williamson, G.A. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Stability analysis of electrical drives fed by matrix converters. In Proceedings of the 2002 IEEE International Symposium on Industrial Electronics, L’Ayuila, Italy, 8–11 July 2002; Volume 4, pp. 1108–1113. [Google Scholar] [CrossRef]
- Rivera, M.; Rodriguez, J.; Wu, B.; Espinoza, J.R.; Rojas, C.A. Current Control for an Indirect Matrix Converter With Filter Resonance Mitigation. IEEE Trans. Ind. Electron. 2012, 59, 71–79. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Loh, P.C. Grid-Current-Feedback Active Damping for LCL Resonance in Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2016, 31, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Casadei, D.; Serra, G.; Tani, A.; Trentin, A.; Zarri, L. Theoretical and experimental investigation on the stability of matrix converters. IEEE Trans. Ind. Electron. 2005, 52, 1409–1419. [Google Scholar] [CrossRef]
- Rivera, M.; Rodriguez, J.; Espinoza, J.R.; Friedli, T.; Kolar, J.W.; Wilson, A.; Rojas, C.A. Imposed Sinusoidal Source and Load Currents for an Indirect Matrix Converter. IEEE Trans. Ind. Electron. 2012, 59, 3427–3435. [Google Scholar] [CrossRef]
- Malekjamshidi, Z.; Jafari, M.; Zhu, J.; Xiao, D. Comparative Analysis of Input Power Factor Control Techniques in Matrix Converters Based on Model Predictive and Space Vector Control Schemes. IEEE Access 2019, 7, 139150–139160. [Google Scholar] [CrossRef]
- Klumpner, C.; Blaabjerg, F. Fundamentals of the Matrix Converter Technology. In Control in Power Electronics; Academic Press: Cambridge, MA, USA, 2002; Chapter 3. [Google Scholar]
- Yoon, S.J.; Lai, N.B.; Kim, K.H. A Systematic Controller Design for a Grid-Connected Inverter with LCL Filter Using a Discrete-Time Integral State Feedback Control and State Observer. Energies 2018, 11, 437. [Google Scholar] [CrossRef] [Green Version]
- She, H.; Lin, H.; Wang, X.; Yue, L. Damped input filter design of matrix converter. In Proceedings of the 2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 672–677. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Borojevic, D.; Lindner, D.K. Input filter interaction in three phase AC-DC converters. In Proceedings of the 30th Annual IEEE Power Electronics Specialists Conference. Record. (Cat. No. 99CH36321), Charleston, SC, USA, 1 July 1999; Volume 2, pp. 987–992. [Google Scholar] [CrossRef]
- Wheeler, P.; Grant, D. Optimised input filter design and low-loss switching techniques for a practical matrix converter. IEE Proc.-Electr. Power Appl. 1997, 144, 53–60. [Google Scholar] [CrossRef]
- Wu, E.; Lehn, P.W. Digital Current Control of a Voltage Source Converter With Active Damping of LCL Resonance. IEEE Trans. Power Electron. 2006, 21, 1364–1373. [Google Scholar] [CrossRef]
- Liu, X.; Forsyth, A.J.; Cross, A.M. Negative Input-Resistance Compensator for a Constant Power Load. IEEE Trans. Ind. Electron. 2007, 54, 3188–3196. [Google Scholar] [CrossRef]
- Liu, F.; Klumpner, C.; Blaabjerg, F. Stability analysis and experimental evaluation of a matrix converter drive system. In Proceedings of the Industrial Electronics Society, 2003. IECON ’03. The 29th Annual Conference of the IEEE, Roanoke, VA, USA, 2–6 November 2003; Volume 3, pp. 2059–2065. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Effects of input voltage measurement on stability of matrix converter drive system. IEE Proc.-Electr. Power Appl. 2004, 151, 487–497. [Google Scholar] [CrossRef]
- Malekjamshidi, Z.; Jafari, M.; Zhu, J.; Xiao, D. Comparison of matrix converter stabilisation techniques based on the damping resistor and digital filter approaches for bidirectional power flow control. IET Power Electron. 2019, 12, 3964–3976. [Google Scholar] [CrossRef] [Green Version]
- Malekjamshidi, Z.; Jafari, M.; Zhu, J.; Xiao, D. Bidirectional power flow control with stability analysis of the matrix converter for microgrid applications. Int. J. Electr. Power Energy Syst. 2019, 110, 725–736. [Google Scholar] [CrossRef]
- Sun, Y.; Su, M.; Li, X.; Wang, H.; Gui, W. A General Constructive Approach to Matrix Converter Stabilization. IEEE Trans. Power Electron. 2013, 28, 418–431. [Google Scholar] [CrossRef]
- Khosravi, M.; Amirbande, M.; Khaburi, D.A.; Rivera, M.; Riveros, J.; Rodriguez, J.; Wheeler4, A.V.P. A Review of Model Predictive Control Strategies for Matrix Converters. IET Power Electron. 2019. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control-A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Cortes, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Predictive Control in Power Electronics and Drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Rivera, M.; Wilson, A.; Rojas, C.A.; Rodriguez, J.; Espinoza, J.R.; Wheeler, P.W.; Empringham, L. A Comparative Assessment of Model Predictive Current Control and Space Vector Modulation in a Direct Matrix Converter. IEEE Trans. Ind. Electron. 2013, 60, 578–588. [Google Scholar] [CrossRef]
- Malekjamshidi, Z.; Jafari, M.; Zhang, J.; Zhu, J. Design and analysis of protection circuits for safe operation of direct matrix converters. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–4. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source voltage (phase) | V rms |
| Output voltage (phase) | V rms |
| Input frequency | Hz |
| Output frequency | Hz |
| Input filter inductance | mH |
| Input filter capacitance | F |
| Resistance of the line and | |
| Output filter inductance | mH |
| Resistance of | |
| Output filter capacitance | F |
| Load inductance | mH |
| Load resistance | |
| Output damping factor | |
| Sampling time | s |
| Weighting factor | |
| Efficiency |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malekjamshidi, Z.; Jafari, M.; Zhu, J.; Rivera, M.; Soong, W. Model Predictive Control of the Input Current and Output Voltage of a Matrix Converter as a Ground Power Unit for Airplane Servicing. Sustainability 2021, 13, 9715. https://doi.org/10.3390/su13179715
Malekjamshidi Z, Jafari M, Zhu J, Rivera M, Soong W. Model Predictive Control of the Input Current and Output Voltage of a Matrix Converter as a Ground Power Unit for Airplane Servicing. Sustainability. 2021; 13(17):9715. https://doi.org/10.3390/su13179715
Chicago/Turabian StyleMalekjamshidi, Zahra, Mohammad Jafari, Jianguo Zhu, Marco Rivera, and Wen Soong. 2021. "Model Predictive Control of the Input Current and Output Voltage of a Matrix Converter as a Ground Power Unit for Airplane Servicing" Sustainability 13, no. 17: 9715. https://doi.org/10.3390/su13179715
APA StyleMalekjamshidi, Z., Jafari, M., Zhu, J., Rivera, M., & Soong, W. (2021). Model Predictive Control of the Input Current and Output Voltage of a Matrix Converter as a Ground Power Unit for Airplane Servicing. Sustainability, 13(17), 9715. https://doi.org/10.3390/su13179715