
General Aspects, Islanding Detection, and Energy Management in Microgrids: A Review


Abstract
:1. Introduction
- To focus on the classification and modes of operation of MGs;
- To understand various methods of MG islanding-state detection;
- To include the maximum number of approaches for implementing MG EMS.
2. General Aspects of MG
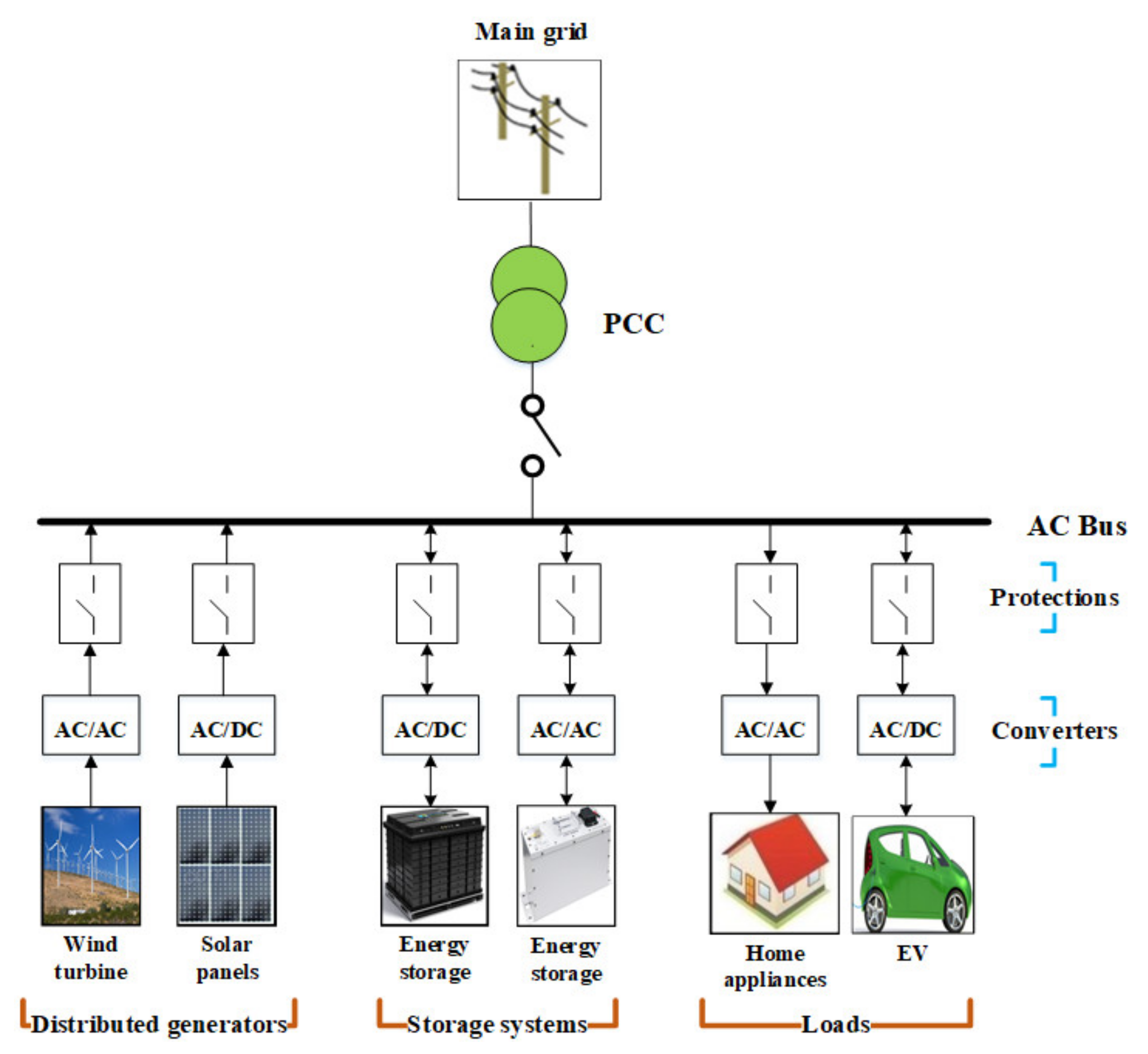
2.1. Microgrid Structure
2.1.1. Distributed Generators (DGs)
2.1.2. Storage Systems
2.1.3. Loads
2.2. Mode of Operation
2.2.1. Islanded Mode
2.2.2. Grid-Tied Mode
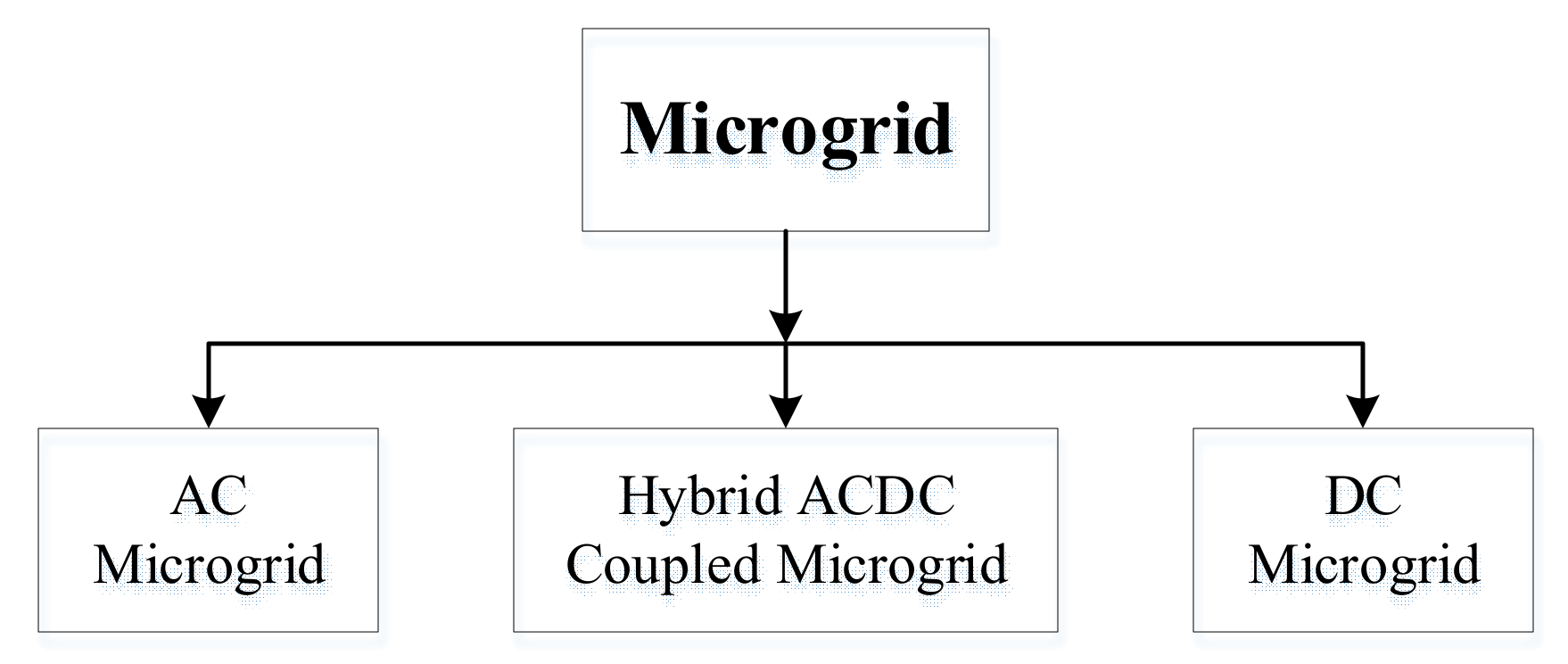
2.3. Classification of MGs
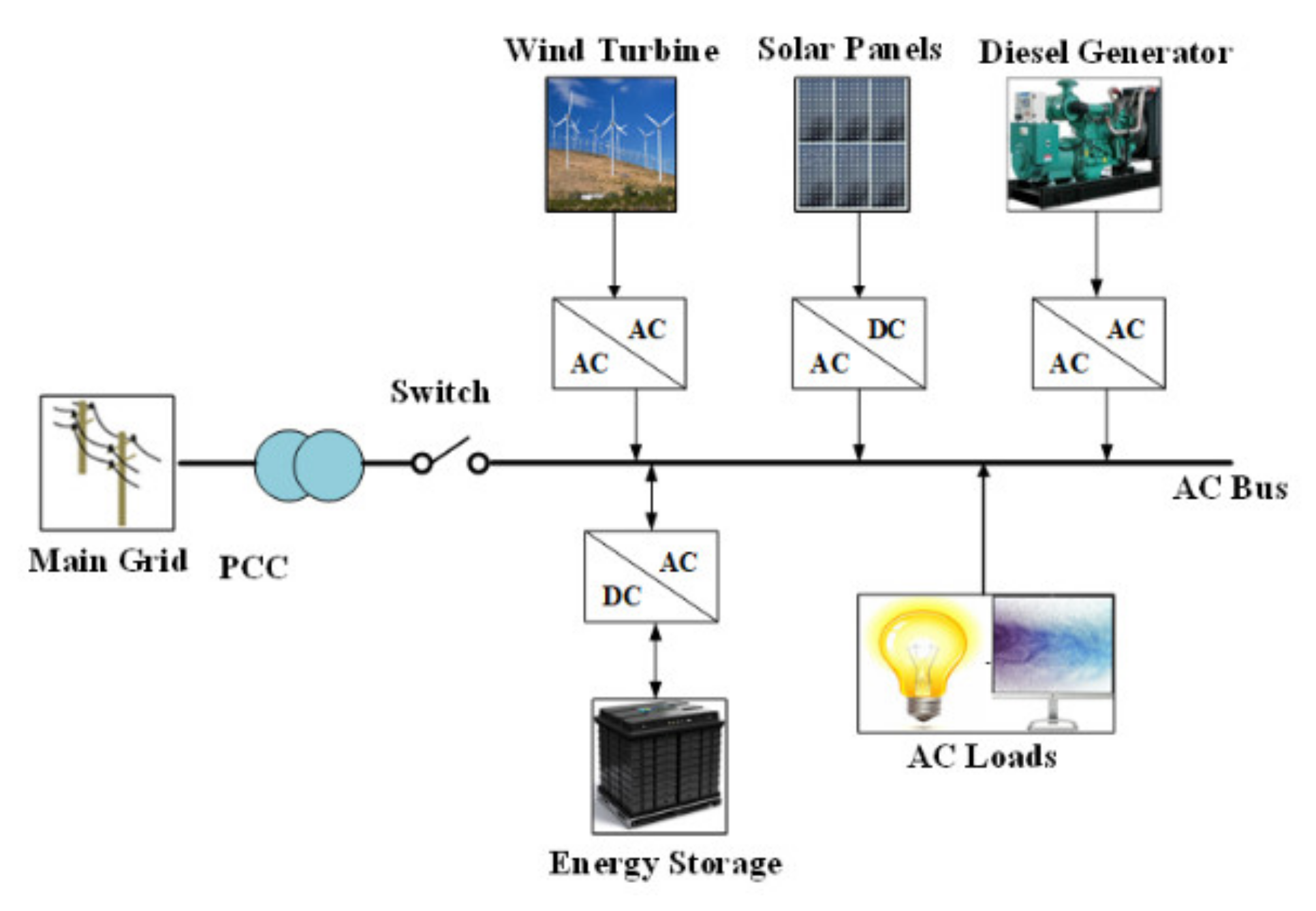
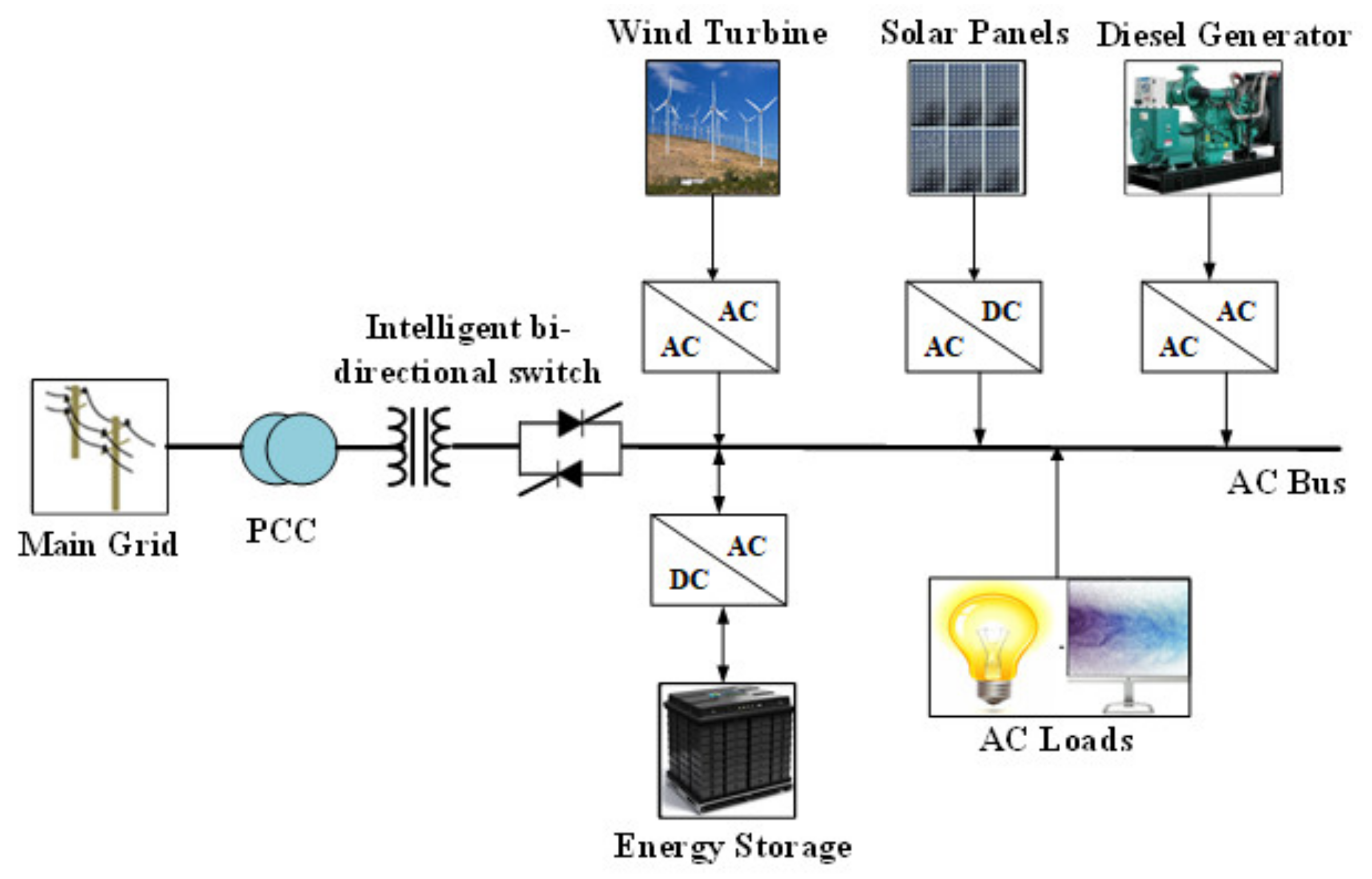
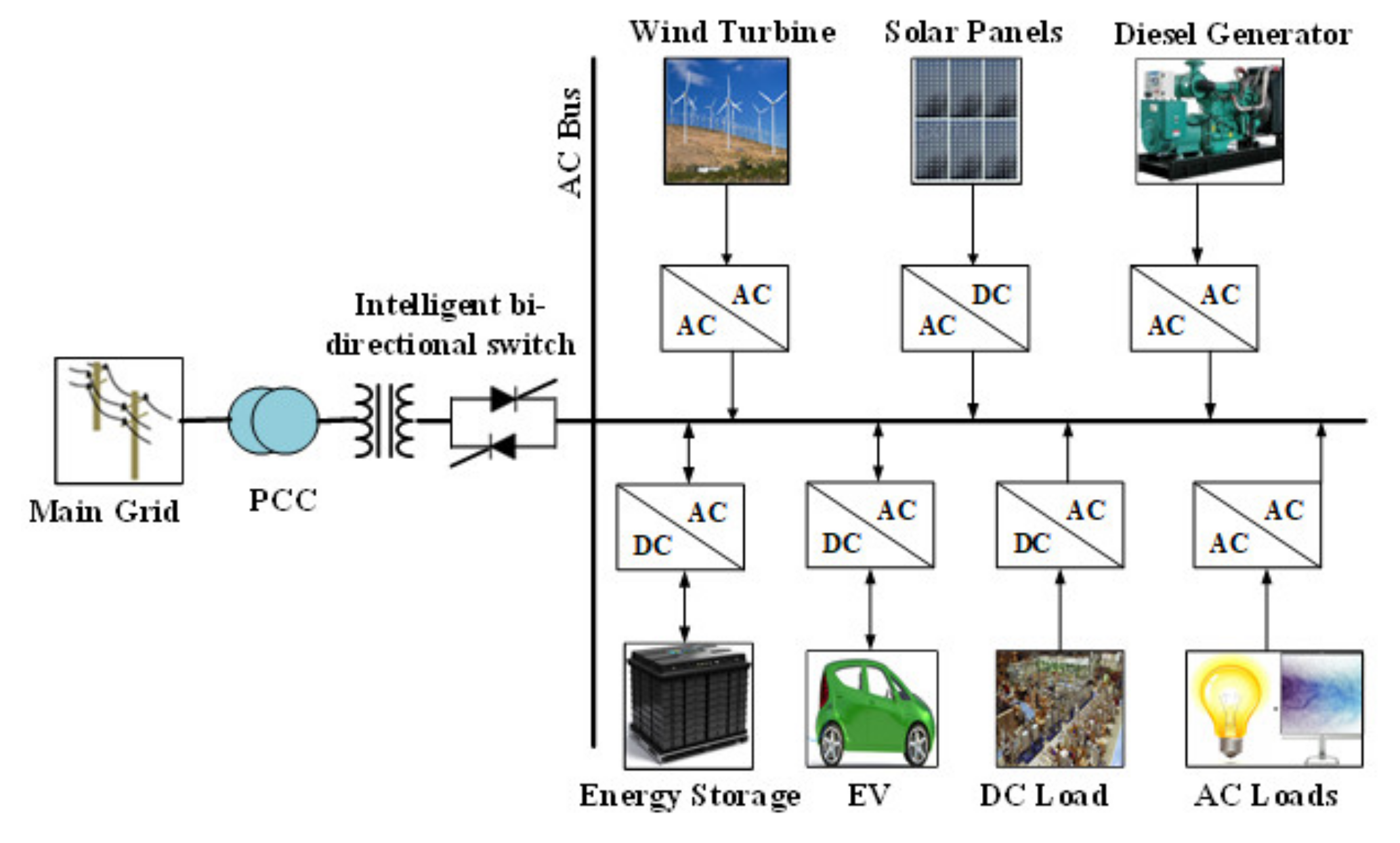
2.3.1. Alternating Current MG (ACMG)
2.3.2. Direct Current MG (DCMG)
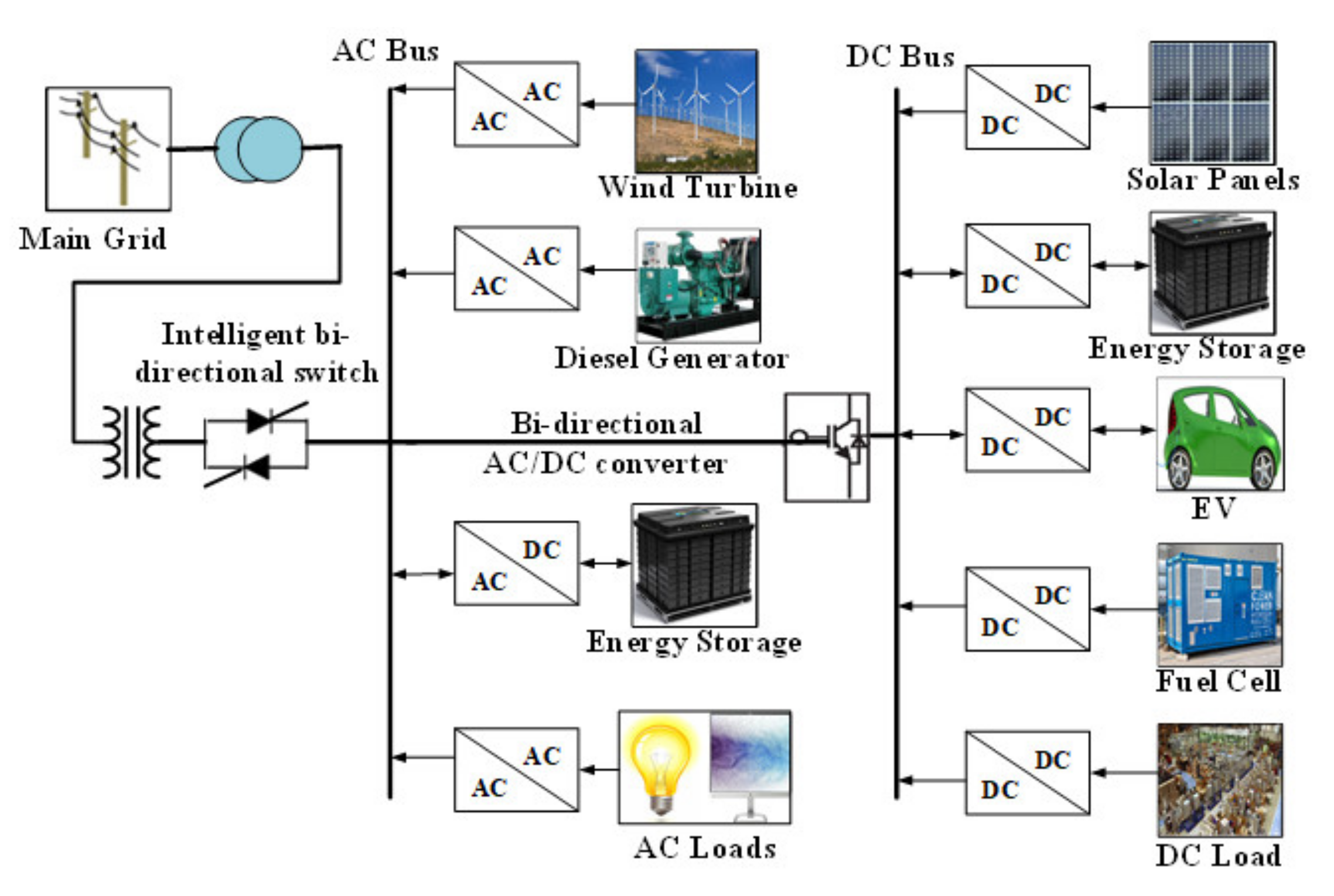
2.3.3. Hybrid AC–DC MG
3. Islanding Detection (ID)
3.1. ID Standards and Test Indices
3.1.1. Non-detection Region (NDR)
- Power Mismatch Space
- Load Parameter Space
3.1.2. Detection Time
3.1.3. Error Detection (ED) Ratio
3.1.4. Power Quality (PQ)
3.1.5. Effect on MG
3.1.6. Implementation Cost
3.2. Islanding Detection Techniques (IDTs)
3.2.1. Local Techniques
- Passive Techniques
- Under/overvoltage (UOV) and under/over frequency (UOF): UOV/UOF is the oldest passive technique. It operates based on the setting of the allowable range of voltage and frequency. This technique is employed in all grid-tied inverters to measure various abnormal conditions. Inverters stop the supply of power (both active and reactive power) if the frequency and voltage exceed the predefined limits at the PCC. In the MG, the power discrepancy between the generation and load demands at the PCC can be represented as follows:where ΔP and ΔQ are the active and reactive power mismatch; Pload and Qload are the active and reactive load; PDG and QDG are the active and reactive DG power.In the grid-tied mode, the UG adds ΔP and ΔQ to balance the active and reactive power. However, if islanding occurs, its frequency and voltage will drift until the active and reactive powers are balanced; thus, this technique detects islanding by measuring frequency and voltage variations.Although this technique has no impact on PQ, its primary weaknesses are its extensive NDR and unpredictable detection time, which may exceed 2 s [37]. One method was proposed to minimize NDR by implementing an interface control in parallel to UOV and UOF [38]. Another method proposed decreasing the NDR by controlling the P–V and P–Q characteristics of constant-current-controlled inverters [36].
- Harmonics measurement: this technique monitors the change in THD and primary harmonics (3rd, 5th, and 7th) at the PCC to identify MG isolation [39]. Under normal conditions, when the MG is connected to the UG, insignificant harmonics are introduced by loads because the grid impedance is small. When the MG operates in the islanding state, the inverters develop current harmonics, which are transferred to the load, and the transformer’s hysteresis effect further exacerbates harmonic distortions at the PCC. Thus, MG islanding can be easily identified [40].The implementation of this technique is easy even when multiple DGs are connected to the same PCC. Conversely, high Q-factor detection using this technique is difficult, and detection limit selection is challenging because UG disturbance can easily induce false detection [36].
- Phase Jump Detection (PJD): this technique is based on measuring the phase discrepancy between the output current and terminal voltage of the inverter, which typically occurs as a sudden “jump.” In normal MG operation, the inverter’s current and voltage will be harmonized at the PCC by modifying the phase-locked loop (PLL) required by the inverters. If isolation occurs, the local load and inverter are separated from the UG. The PJD system checks variations in the phase angle to identify islanding [31]. This approach is simple to implement, does not distort the inverter PQ, and can be used in multi-inverter systems [41].The main limitation of this technique is in the setting of detection limits because of the load-switching effects. It is challenging to detect islanding using this technique if the loads do not generate a large enough phase error. Thus, PJD is useful only for MGs that evince nearly constant load switching and a large phase angle.
- Rate of Change in Frequency (RCF): The frequency will change if the MG disconnects from the UG. When the frequency surpasses a set limit, the inverters shut down, and islanding is identified. RCF is evaluated over a few cycles [42]. RCF is more responsive, and its detection time (24 ms) is less than that of UOV/UOF [43]. Any distortion generated by load variations could lead to frequency deviations in ID. Nonetheless, when severe frequency deviations occur, the detection time can be in fewer than five revolutions [44]. The main shortcoming of RCF is that it is very responsive to load fluctuation and switching (even a small disturbance can change the frequency), which may affect ID. Moreover, the selection of the detection limit is challenging. This technique is unable to discriminate between islanding and load variations as the cause of frequency change [45]. Thus, RCF is not suitable for loads with high variations.
- Rate of Change in Power (RCP): This technique monitors DG power output changes because the disconnection from the grid causes load changes. When the MG is islanded, the RCP output will be higher than that of the MG in the grid-tied mode, even when the load change rate is equal in both cases. Thus, the power changes are monitored for a few test cycles. The MG will be isolated from the UG if the combined changes in the test cycles surpass the set detection limit. The rate of change in the reactive power approach was proposed in [46] to detect the islanding of synchronous generator-based DGs.The usual detection time of RCP is approximately 24–26 ms [43]. In comparison with UOF, the detection time is not affected by such small power discrepancies. This technique can also immediately identify uncoordinated reclosing of the UG supply to the MG to ensure the reliable functioning of the electric power network. However, this technique has an NDR, even under power balance conditions.
- Voltage Unbalance (VU): When the MG disconnects from the UG, the VU of DG changes because of the change in the network topology. If the unbalance in the three-phase DG output voltage surpasses the allowable limit, this is considered islanding [47]. The VU deviation is monitored and compared under normal and steady-state loading conditions, and any unexpected VU is identified as MG islanding. The single-cycle average of VU and VU deviation was investigated every 1/4 cycles (4.17 ms) in [48]. Recently, single-cycle control-based inverters to detect islanding were proposed in [49], where simulation results showed that this technique could work effectively with less NDR.Passive detection techniques are cost-effective, easy to implement, and have short detection times. Thus, these techniques can handle most of the instabilities that occur in the UG. Nevertheless, the main shortcoming of passive IDTs is the large NDR, which hampers the identification of the correct MG operating state. In addition, the load affects islanding detection in these techniques. These shortcomings could be resolved using active IDTs, which are discussed in the following section. Table 3 gives a comparison between various passive IDTs, highlighting their benefits and limitations.
- Active Techniques
- Impedance Measurement (IM): this technique involves varying the current amplitude of the inverter. When the MG is separated from the UG, the voltage magnitude changes because of the change in the current’s magnitude, which causes an impedance variation that can be employed for ID [40]. However, in an active direct technique, a shunt inductor is temporarily attached to a supply voltage. The supply voltage reduction and short-circuit current approaches are utilized to determine the power system source impedance [36].The IM-based ID time is approximately 0.77–0.95 s [29], and its NDR is very small for individual DG systems, which is its main advantage. However, this technique has many limitations, including its low detection performance for multi-inverter arrangements, except when all inverters are working simultaneously. Moreover, it is difficult to define the impedance base limit because IM requires a precise UG impedance value. Thus, the practical implementation of this technique represents a challenge.
- Sliding Mode Frequency Shift (SMFS): this technique employs positive feedback to vary the phase at the PCC, followed by using the temporary frequency to identify islanding. The phage angle of the inverters can be defined as follows:where θx is the maximum phase angle at the frequency fx, and fy and fm − 1 are the rated and previous cycle frequency, respectively.When the MG is operating under normal conditions, the phase angle between the PCC voltage and inverter current is maintained at close to zero. The phase angle of the frequency and load may change when the MG is detached from the UG. Thus, islanding can be detected if the frequency deviation surpasses the set limit [50]. The detection time of SMFS is approximately 0.4 s [34]. The main benefits of SMFS are that its implementation is easy, and it has a smaller NDR than other active techniques. However, this technique reduces the grid PQ and transient stability. These problems are common for all techniques that use positive feedback. This could be solved by including an extra phase shift, called the enhanced-SMFS [50].
- Active Frequency Drift (AFD): similar to SMFS, this technique employs positive feedback to change the frequency of the inverter current. In a grid-tied mode, the PCC voltage and frequency will not change, owing to the steadiness of the UG. When grid separation occurs, the voltage crosses zero earlier than expected, thus creating a phase discrepancy between the inverter’s current and voltage. This induces the inverter to drift the frequency of the current to cancel the phase discrepancy. The drift frequency outstrips the set limit, and islanding can be identified [47].The advantages of AFD are that its implementation is simple, and it has a small NDR. Notably, no NDR is present in resistive loads within a sensing period of 2 s [29]. However, this technique is unable to detect islanding for multiple inverters because of various deviations in the frequency bias of the inverters [51]. The PQ of the inverter output deteriorates more rapidly with the increase in the distortions in the injected current. Load parameters have a significant effect on this technique. The islanding sensing time and NDR increase with higher Q values if the load is not resistive. Thus, AFD is only suitable for an ID of MGs comprising resistive loads and a single inverter. The Fourier series coefficients and RMS value of the current waveform are used to improve traditional AFD. This approach can decrease THD by approximately 30% of the current waveform. Hence, the technique can rapidly identify islanding with a reduced NDR. The performance of the traditional approach can be significantly enhanced by using AFD with positive feedback (AFDPF) [52].
- Sandia Frequency Shift (SFS): this technique, typically called AFDPF, is a modification of AFD that uses positive feedback for ID. At PCC, this technique tries to alter the voltage frequency when attached to the UG, but the UG prohibits this. When detachment from the UG occurs, the chopping coefficient increases with the frequency increase at PCC. This results in an increase in the inverter frequency. This frequency shift enables efficient ID. The ID time here is approximately 0.5 s.The implementation of this approach is simple, and its NDR is small compared with those of other active IDTs. SFS is used in conjunction with the Sandia voltage shift (SVS)-related islanding technique, which is a very efficient approach [53]. Nonetheless, SFS significantly affects the PQ and the system stability, which may lead to adverse behavior in the system response. Furthermore, positive feedback introduces harmonics and noise [54].
- Frequency Jump (FJ): this is another modified form of AFD, based on varying the voltage frequency to identify islanding. When the MG is detached from the UG, islanding could be determined by an alteration in the voltage frequency [29,31]. FJ is efficient in discovering MG isolation with a single inverter. However, as is similar to AFD, the identification efficiency decreases when multiple inverters are connected in parallel.
- Sandia Voltage Shift (SVS): this technique is analogous to SFS. By employing positive feedback in the voltage amplitude at PCC, the inverter modifies its power and current. In the grid-tied mode, the voltage amplitude is unaffected by the power change, whereas, without connecting with the UG, the power variations stimulate the voltage drift to identify islanding [40]. The SVS scheme is simple to implement and operate, and its performance is similar to that of SFS. The main disadvantage of SVS is that it somewhat degrades PQ. In this technique, the inverter operation efficiency is reduced because of the frequent changes in the inverter’s output power [40,55].
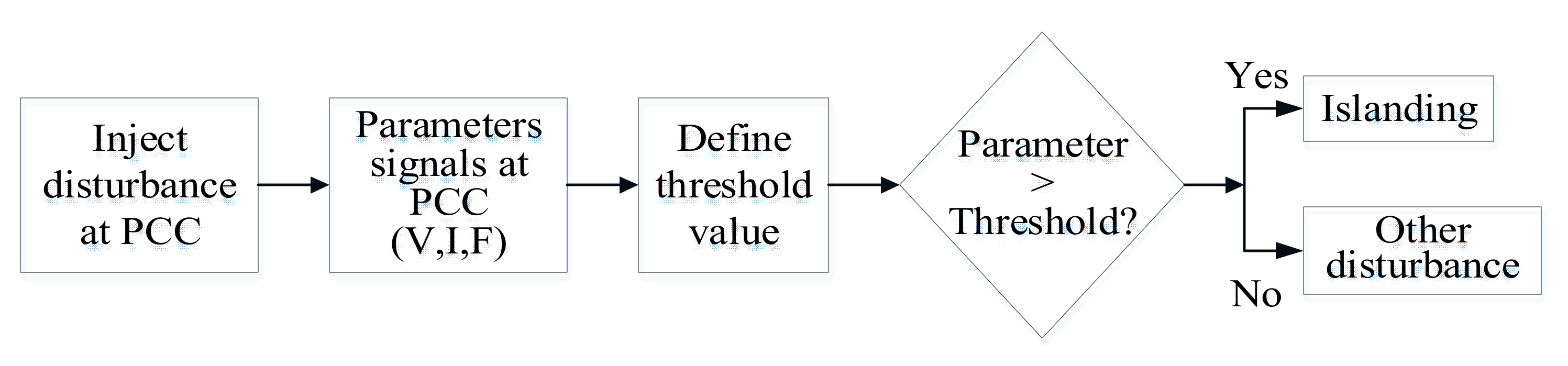
- Negative-Sequence Current (NSC) Injection: this technique involves injecting NSC into a voltage source converter and measuring the voltage at the PCC, to identify MG isolation. When the MG is attached to the UG, the injected NSC passes through the UG without affecting the voltage at the PCC. However, the injected NSC passes through the load and leads to an imbalance in the PCC voltage when the MG is detached from the UG, causing the voltage to exceed the threshold.This technique can identify islanding within 60 ms, which is an extremely short detection time compared with other active techniques [56]. This technique offers the advantages of not having NDR and being unresponsive to load variation.
- Hybrid Techniques
- Voltage Unbalance and Frequency Set Point: a hybrid technique that employs positive feedback, VU, and THD techniques was proposed in [57]. The hybridization eliminates the individual shortcomings of both approaches. The three-phase voltages are constantly measured at the DG output terminal while the VU is calculated. Because VU is more responsive to system disturbances, VU is calculated for every MG, rather than THD. When any disturbance occurs in MG, a high VU peak is generated. This approach can effectively distinguish between the islanding state and load switching. The detection time of this hybrid technique is ~0.21 s [57].
- Voltage and Real Power Shift: this method uses voltage variation (passive IDT) and actual power shift (active IDT) to eliminate the individual drawbacks in determining the MG operating state [58]. Using this technique, islanding can be identified with a multi-inverter-based MG working at a PF of unity. The active IDT is employed in the system network if the passive IDT fails to recognize the MG isolation. This approach can only alter the real power of the MG at a PF of unity.
- Voltage Fluctuation Injection: this approach is based on the addition of voltage variation. Here, a passive IDT (RCF/RCV) and an active IDT (correction factor) are combined as a standby to obtain improved efficiency. This method uses digital signal processing to determine the correction factor, RCF, and RCV to precisely distinguish the types of disturbances [36]. In [59], RCF is applied as a safety system, while dynamic power fluctuation and reserve VAR detection are used as a standby safety system during islanding state identification. The NDR decreased for ID when RCF was employed with an active technique. This technique can determine MG islanding in 0.21 s [60].
- Hybrid SFS and Q–f Approach: in this approach, SFS (active IDT) and the Q–f droop curve (passive IDT) are combined in order to detect islanding. The optimal gain is obtained by employing an optimization technique to reduce the limitation of SFS and minimize NDR. Next, the Q–f droop curve is utilized to increase the effectiveness of ID [61].
- Combining VU with SFS and SVS: this approach can decrease the adverse effects on the power system transient response compared with using SFS and SVS techniques alone [57]. Unlike the VU approach, this technique can easily segregate the load switching and islanding states with no false detection.
3.2.2. Remote IDTs
- Communication Based Techniques
- 1.
- Power Line Carrier Communication (PLCC)
- 2.
- Signal Generated by Disconnection (SGD)
- 3.
- Supervisory Control and Data Acquisition (SCADA)
- Intelligent Techniques
- 1.
- Artificial Neural Network (ANN)-based Technique
- 2.
- Probabilistic Neural Network (PNN)-based Technique
- 3.
- Decision Tree (DT)-based Technique
- 4.
- Support Vector Machine (SVM)-based Technique
- 5.
- Fuzzy Logic (FL)-based Technique
4. MG Energy Management System (EMS)
4.1. Classification of EMS
4.1.1. Centralized EMS
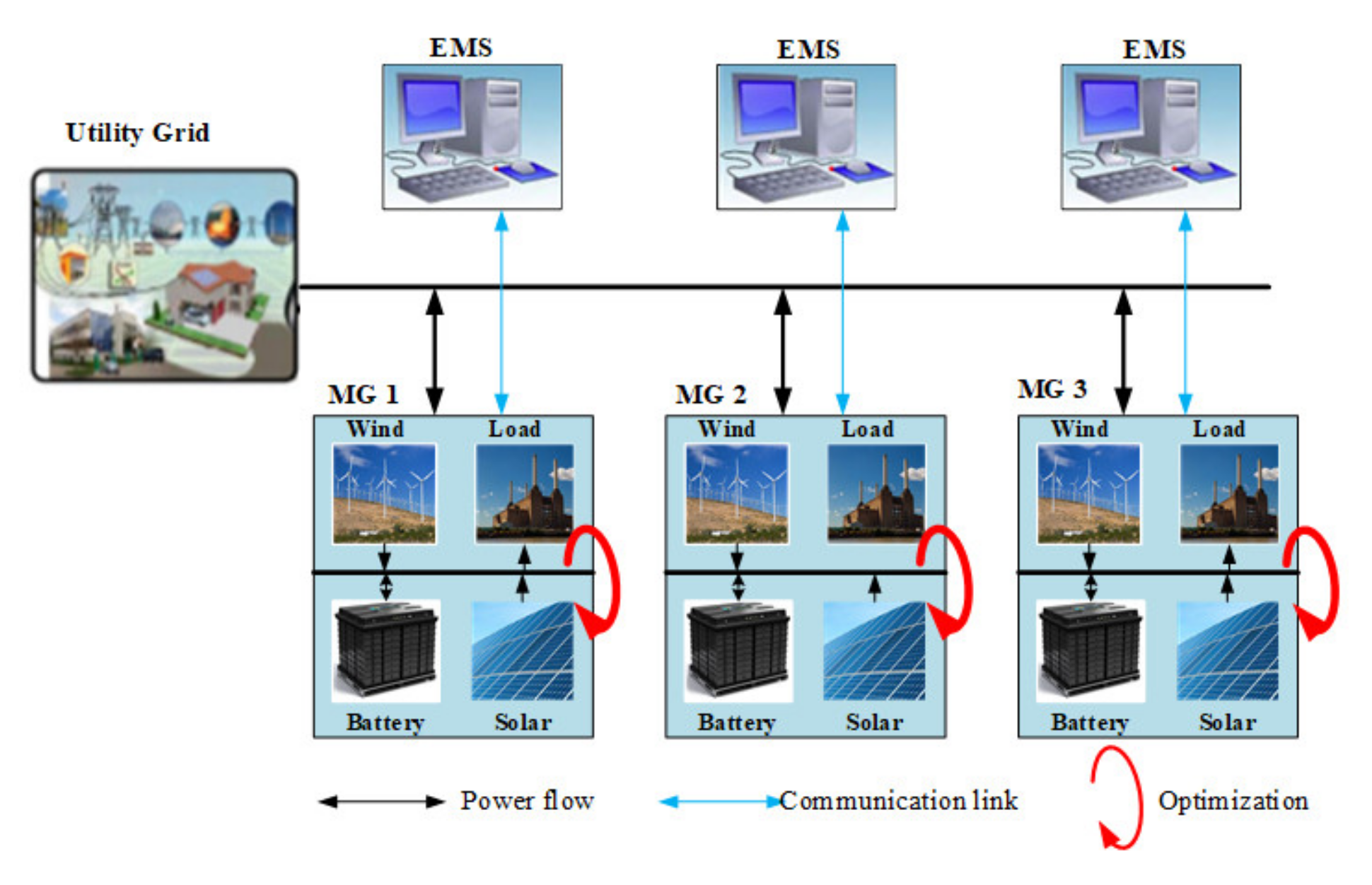
4.1.2. Decentralized EMS
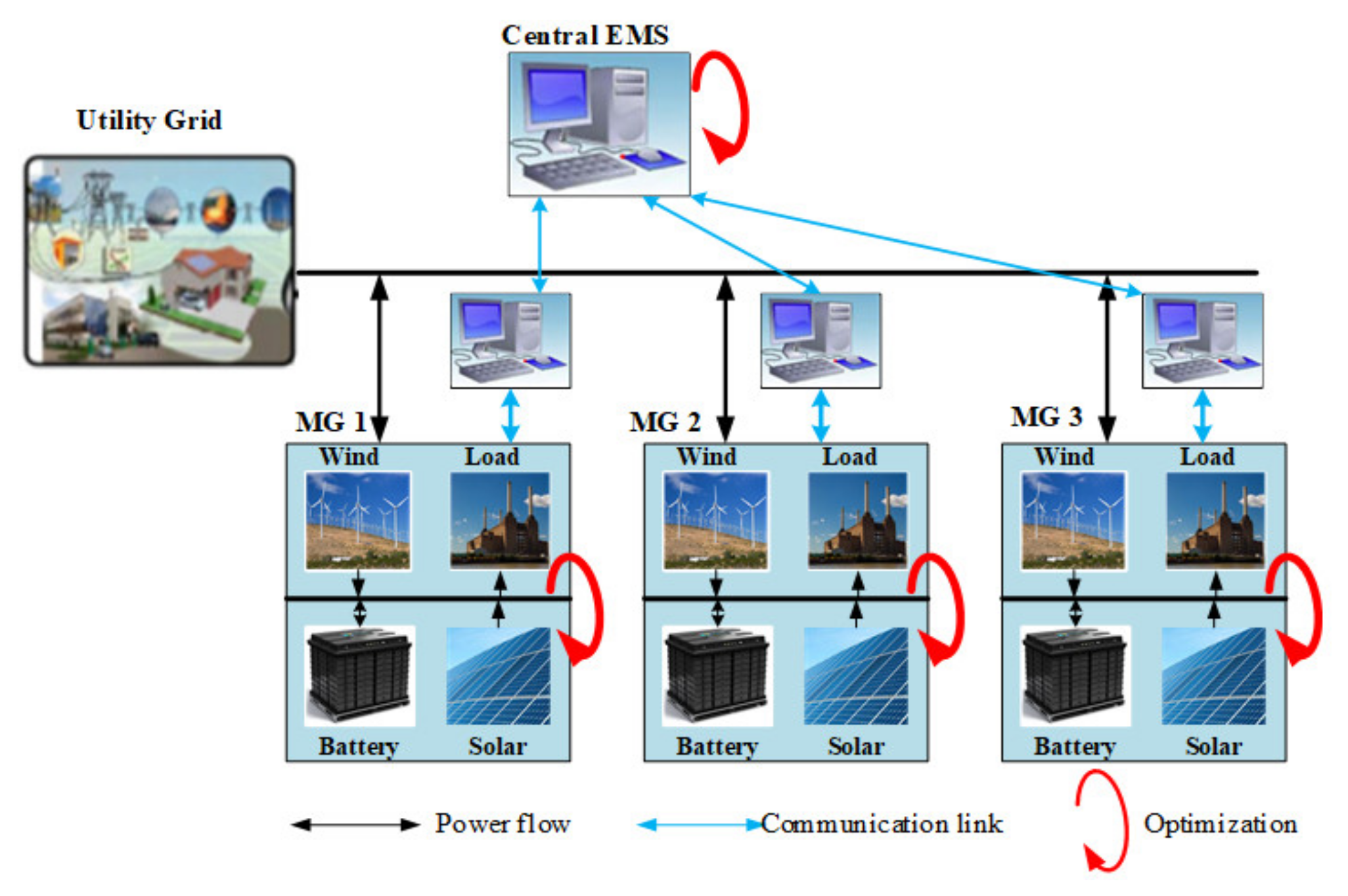
4.1.3. Hybrid EMS
4.2. EMS-Based on Optimization Techniques
4.2.1. Traditional Mathematical Optimization Approaches
4.2.2. Computer Intelligent Optimization Approaches
- Particle Swarm Optimization (PSO)
- Genetic algorithm (GA)
4.3. EMS Considering Conventional Techniques
4.3.1. Linear and Nonlinear Programming (LP/NLP) Techniques
4.3.2. Dynamic Programming (DP) and Rule-Based (RB) Techniques
4.4. EMS Considering Metaheuristic Approaches
4.4.1. Genetic Algorithm (GA)
4.4.2. Particle Swarm Optimization (PSO)
4.4.3. Other Metaheuristic Techniques
4.5. EMS Based on Artificial Intelligence Methods
4.5.1. Fuzzy Logic (FL) and Neural Network (NN)
4.5.2. Multiagent Systems (MAS)
4.5.3. Other Artificial Intelligence Techniques
4.6. EMS Based on Stochastic and Robust Optimization (RO) Methods
5. Challenges and Recommendations
5.1. Islanding of MGs
5.2. Cost Minimization
5.3. EMS of MG
5.4. Protection
5.5. Reliability
5.6. Efficiency
6. Conclusion and Future Prospects
- An intelligent technique, along with an advanced signal processing unit, can be an effective tool for ID. Various devices like smart meters, phasor measurement units, and so on, can be applied for ID. This can significantly reduce the implementation time and cost, making it practical and economically viable.
- Advanced research is needed to enhance a next-generation BESS in MG applications. Some issues of BESSs, such as materials, cost, size, control interface, and safety can be considered to achieve correct functionality and market recognition.
- A better forecasting model can reduce daily expenses. Intelligent and robust forecasting models can be employed that can benefit both consumers and operators, as well as minimizing daily expenses.
- In the MG EMS, more functions can be studied as objectives, such as the PQ index, equipment lifetime and consumer security. In the control aspect, the load control approaches should be studied more than in the past.
- An optimal EMS with an advanced BESS approach can be a great choice for prospective development, to enhance the overall system efficiency and minimize the cost.
- Enhanced meta-heuristic techniques have been applied for MG EMS; new solvers can be employed for simplification and to hasten the solving process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Acronyms
| AC | Alternating current | NSC | Negative-sequence current |
| AFD | Active frequency drift | PCC | Point of common coupling |
| AFDPF | AFD with positive feedback | PF | Power factor |
| ANN | Artificial neural network | PJD | Phase jump detection |
| BESS | Battery energy storage system | PLCC | Power line carrier communication |
| DC | Direct current | PLL | Phase-locked loop |
| DER | Distributed energy resource | PNN | Probabilistic neural network |
| DG | Distributed generation | PQ | Power quality |
| DOD | Depth of discharge | PSO | Particle swarm optimization |
| DP | Dynamic programming | PV | Photovoltaic |
| DR | Demand response | RB | Rule-based |
| DT | Decision tree | RCF | Rate of change of frequency |
| DWT | Discrete wavelet transform | RCP | Rate of change of power |
| ED | Error detection | RCV | Rate of change of voltage |
| EMS | Energy management system | RES | Renewable energy resource |
| ESS | Energy storage system | RO | Robust optimization |
| EV | Electric vehicle | SCADA | Supervisory control and data acquisition |
| FJ | Frequency jump | SFS | Sandia frequency shift |
| FL | Fuzzy logic | SGD | Signal generated by disconnection |
| GA | Genetic algorithm | SMFS | Sliding mode frequency shift |
| GHG | Greenhouse gas | SOC | State of charge |
| ID | Islanding detection | STATCOM | Static synchronous compensator |
| IDT | Islanding detection technique | SVM | Support vector machine |
| IM | Impedance measurement | SVS | Sandia voltage shift |
| LP | Linear programming | TG | Traditional generation |
| MAS | Multi-agent system | THD | Total harmonic distortion |
| MILP | Mixed-integer linear programming | UG | Utility grid |
| MINLP | Mixed-integer nonlinear programming | UOF | Under/over frequency |
| MG | Microgrid | UOV | Under/over voltage |
| NDR | Non-detection region | VU | Voltage unbalance |
| NLP | Nonlinear programming | WPT | Wavelet packet transform |
| NN | Neural network | DWT | Discrete wavelet transform |
| NP | Linear programming |
References
- Heussen, K.; Koch, S.; Ulbig, A.; Andersson, G. Unified System-Level Modeling of Intermittent Renewable Energy Sources and Energy Storage for Power System Operation. IEEE Syst. J. 2012, 6, 140–151. [Google Scholar] [CrossRef] [Green Version]
- Synthetic Biology to Systematically Decarbonize our Future Energy Systems. 2010. Available online: https://www.algaeu.com/literature-review/synthetic-biology-to-systematically-decarbonize-our-future-energy-systems (accessed on 20 March 2021).
- Islam, M.M.; Nagrial, M.; Rizk, J.; Hellany, A. Review of Application of Optimization Techniques in Smart Grids. In Proceedings of the 2018 2nd International Conference On Electrical Engineering (EECon), Chengdu, China, 25–26 March 2018; pp. 99–104. [Google Scholar]
- Hossain, E.; Khan, I.; Un-Noor, F.; Sikander, S.S.; Sunny, M.S.H. Application of Big Data and Machine Learning in Smart Grid, and Associated Security Concerns: A Review. IEEE Access 2019, 7, 13960–13988. [Google Scholar] [CrossRef]
- Song, I.; Jung, W.; Kim, J.; Yun, S.; Choi, J.; Ahn, S. Operation Schemes of Smart Distribution Networks With Distributed Energy Resources for Loss Reduction and Service Restoration. IEEE Trans. Smart Grid 2013, 4, 367–374. [Google Scholar] [CrossRef]
- Gonçalves, V.A.D.S.; dos Santos, F.J.M.-H. Energy management system ISO 50001:2011 and energy management for sustainable development. Energy Policy 2019, 133, 110868. [Google Scholar] [CrossRef]
- Zou, H.; Mao, S.; Wang, Y.; Zhang, F.; Chen, X.; Cheng, L. A Survey of Energy Management in Interconnected Multi-Microgrids. IEEE Access 2019, 7, 72158–72169. [Google Scholar] [CrossRef]
- Falahi, M.; Lotfifard, S.; Ehsani, M.; Butler-Purry, K. Dynamic Model Predictive-Based Energy Management of DG Integrated Distribution Systems. IEEE Trans. Power Deliv. 2013, 28, 2217–2227. [Google Scholar] [CrossRef]
- Bakar, N.N.A.; Hassan, M.Y.; Sulaima, M.F.; Nasir, M.N.M.; Khamis, A. Microgrid and load shedding scheme during islanded mode: A review. Renew. Sustain. Energy Rev. 2017, 71, 161–169. [Google Scholar] [CrossRef]
- Su, W.; Wang, J. Energy Management Systems in Microgrid Operations. Electr. J. 2012, 25, 45–60. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Wang, R.; Zhang, C. Analysis and Mitigation of Resonance Propagation in Grid-Connected and Islanding Microgrids. IEEE Trans. Energy Convers. 2015, 30, 70–81. [Google Scholar] [CrossRef]
- Kumar, M.V.M.; Mishra, M.K.; Kumar, C. A Grid-Connected Dual Voltage Source Inverter With Power Quality Improvement Features. IEEE Trans. Sustain. Energy 2015, 6, 482–490. [Google Scholar] [CrossRef]
- Han, Y.; Shen, P.; Zhao, X.; Guerrero, J.M. An Enhanced Power Sharing Scheme for Voltage Unbalance and Harmonics Compensation in an Islanded AC Microgrid. IEEE Trans. Energy Convers. 2016, 31, 1037–1050. [Google Scholar] [CrossRef] [Green Version]
- Planas, E.; Gil-de-Muro, A.; Andreu, J.; Kortabarria, I.; de Alegría, I.M. General aspects, hierarchical controls and droop methods in microgrids: A review. Renew. Sustain. Energy Rev. 2013, 17, 147–159. [Google Scholar] [CrossRef]
- Lasseter, R.H. Smart Distribution: Coupled Microgrids. Proc. IEEE 2011, 99, 1074–1082. [Google Scholar] [CrossRef]
- Planas, E.; Andreu, J.; Gárate, J.I.; de Alegría, I.M.; Ibarra, E. AC and DC technology in microgrids: A review. Renew. Sustain. Energy Rev. 2015, 43, 726–749. [Google Scholar] [CrossRef]
- Oliveira, D.Q.; de Souza, A.C.Z.; Santos, M.V.; Almeida, A.B.; Lopes, B.I.L.; Saavedra, O.R. A fuzzy-based approach for microgrids islanded operation. Electr. Power Syst. Res. 2017, 149, 178–189. [Google Scholar] [CrossRef]
- Bahmani-Firouzi, B.; Azizipanah-Abarghooee, R. Optimal sizing of battery energy storage for micro-grid operation management using a new improved bat algorithm. Int. J. Electr. Power Energy Syst. 2014, 56, 42–54. [Google Scholar] [CrossRef]
- Mehrizi-Sani, A.; Iravani, R. Potential-Function Based Control of a Microgrid in Islanded and Grid-Connected Modes. IEEE Trans. Power Syst. 2010, 25, 1883–1891. [Google Scholar] [CrossRef]
- Patrao, I.; Figueres, E.; Garcerá, G.; González-Medina, R. Microgrid architectures for low voltage distributed generation. Renew. Sustain. Energy Rev. 2015, 43, 415–424. [Google Scholar] [CrossRef]
- Deng, N.; Zhang, X.; Wang, P.; Gu, X.; Wu, M. A converter-based general interface for AC microgrid integrating to the grid. In Proceedings of the IEEE PES ISGT Europe 2013, Lyngby, Denmark, 6–9 October 2013; pp. 1–5. [Google Scholar]
- Unamuno, E.; Barrena, J.A. Hybrid ac/dc microgrids—Part I: Review and classification of topologies. Renew. Sustain. Energy Rev. 2015, 52, 1251–1259. [Google Scholar] [CrossRef]
- Unamuno, E.; Barrena, J.A. Hybrid ac/dc microgrids—Part II: Review and classification of control strategies. Renew. Sustain. Energy Rev. 2015, 52, 1123–1134. [Google Scholar] [CrossRef]
- Llaria, A.; Curea, O.; Jiménez, J.; Camblong, H. Survey on microgrids: Unplanned islanding and related inverter control techniques. Renew. Energy 2011, 36, 2052–2061. [Google Scholar] [CrossRef]
- IEEE Std 1547. IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE Std 1547-2003. Available online: https://ieeexplore.ieee.org/document/1225051 (accessed on 25 March 2021).
- UL 1741. Inverter, Converter, and Controllers for Use in Independent Power System. 2001. Available online: https://fdocuments.in/document/ul1741-inverter.html (accessed on 25 March 2021).
- IEC 62116 Edition 1.0. International Standard, Test Procedure of Islanding Prevention Measures for Utility-Interconnected Photovoltaic Inverters. 2008. Available online: https://infostore.saiglobal.com/preview/iec/iec62000/62100/iec62116%7Bed1.0%7Db.pdf?sku=1021069 (accessed on 28 March 2021).
- IEEE Std 929. IEEE Recommended Practice for Utility Interface of Photovoltaic (PV) Systems. EEE Std 929-2000. 2000. Available online: https://ieeexplore.ieee.org/document/836389 (accessed on 28 March 2021).
- Ahmad, K.N.E.K.; Selvaraj, J.; Rahim, N.A. A review of the islanding detection methods in grid-connected PV inverters. Renew. Sustain. Energy Rev. 2013, 21, 756–766. [Google Scholar] [CrossRef]
- Yu, B.; Matsui, M.; Yu, G. A review of current anti-islanding methods for photovoltaic power system. Sol. Energy 2010, 84, 745–754. [Google Scholar] [CrossRef]
- Ropp, M.E.; Begovic, M.; Rohatgi, A.; Kern, G.A.; Bonn, R.H.; Gonzalez, S. Determining the relative effectiveness of islanding detection methods using phase criteria and nondetection zones. IEEE Trans. Energy Convers. 2000, 15, 290–296. [Google Scholar] [CrossRef]
- Dutta, S.; Sadhu, P.K.; Jaya Bharata Reddy, M.; Mohanta, D.K. Shifting of research trends in islanding detection method—A comprehensive survey. Prot. Control. Mod. Power Syst. 2018, 3, 9. [Google Scholar] [CrossRef]
- Salles, D.; Freitas, W.; Vieira, J.C.M.; Venkatesh, B. A Practical Method for Nondetection Zone Estimation of Passive Anti-Islanding Schemes Applied to Synchronous Distributed Generators. IEEE Trans. Power Deliv. 2015, 30, 2066–2076. [Google Scholar] [CrossRef]
- Lopes, L.A.C.; Huili, S. Performance assessment of active frequency drifting islanding detection methods. IEEE Trans. Energy Convers. 2006, 21, 171–180. [Google Scholar] [CrossRef]
- Vieira, J.C.M.; Salles, D.; Freitas, W. Power imbalance application region method for distributed synchronous generator anti-islanding protection design and evaluation. Electr. Power Syst. Res. 2011, 81, 1952–1960. [Google Scholar] [CrossRef]
- Khamis, A.; Shareef, H.; Bizkevelci, E.; Khatib, T. A review of islanding detection techniques for renewable distributed generation systems. Renew. Sustain. Energy Rev. 2013, 28, 483–493. [Google Scholar] [CrossRef]
- Jones, R.A.; Sims, T.R.; Imece, A.F. Investigation of potential islanding of a self-commutated static power converter in photovoltaic systems. IEEE Trans. Energy Convers. 1990, 5, 624–631. [Google Scholar] [CrossRef]
- Zeineldin, H.H.; El-Saadany, E.F.; Salama, M.M.A. Impact of DG interface control on islanding detection and nondetection zones. IEEE Trans. Power Deliv. 2006, 21, 1515–1523. [Google Scholar] [CrossRef]
- Merino, J.; Mendoza-Araya, P.; Venkataramanan, G.; Baysal, M. Islanding Detection in Microgrids Using Harmonic Signatures. IEEE Trans. Power Deliv. 2015, 30, 2102–2109. [Google Scholar] [CrossRef] [Green Version]
- Velasco, D.; Trujillo, C.L.; Garcerá, G.; Figueres, E. Review of anti-islanding techniques in distributed generators. Renew. Sustain. Energy Rev. 2010, 14, 1608–1614. [Google Scholar] [CrossRef]
- Balaguer-Alvarez, I.J.; Ortiz-Rivera, E.I. Survey of Distributed Generation Islanding Detection Methods. IEEE Lat. Am. Trans. 2010, 8, 565–570. [Google Scholar] [CrossRef]
- Nale, R.; Biswal, M.; Kishor, N. A Transient Component Based Approach for Islanding Detection in Distributed Generation. IEEE Trans. Sustain. Energy 2019, 10, 1129–1138. [Google Scholar] [CrossRef]
- Redfern, M.A.; Usta, O.; Fielding, G. Protection against loss of utility grid supply for a dispersed storage and generation unit. IEEE Trans. Power Deliv. 1993, 8, 948–954. [Google Scholar] [CrossRef]
- Freitas, W.; Wilsun, X.; Affonso, C.M.; Zhenyu, H. Comparative analysis between ROCOF and vector surge relays for distributed generation applications. IEEE Trans. Power Deliv. 2005, 20, 1315–1324. [Google Scholar] [CrossRef]
- Dysko, A.; Booth, C.; Anaya-Lara, O.; Burt, G.M. Reducing unnecessary disconnection of renewable generation from the power system. IET Renew. Power Gener. 2007, 1, 41–48. [Google Scholar] [CrossRef]
- Nikolovski, S.; Baghaee, H.R.; Mlakić, D. Islanding Detection of Synchronous Generator-Based DGs using Rate of Change of Reactive Power. IEEE Syst. J. 2019, 13, 4344–4354. [Google Scholar] [CrossRef]
- Li, C.; Cao, C.; Cao, Y.; Kuang, Y.; Zeng, L.; Fang, B. A review of islanding detection methods for microgrid. Renew. Sustain. Energy Rev. 2014, 35, 211–220. [Google Scholar] [CrossRef]
- Sung-Il, J.; Kwang-Ho, K. An islanding detection method for distributed generations using voltage unbalance and total harmonic distortion of current. IEEE Trans. Power Deliv. 2004, 19, 745–752. [Google Scholar] [CrossRef]
- Reddy, V.R.; Sreeraj, E.S. A Feedback based Passive Islanding Detection Technique for One Cycle Controlled Single Phase Inverter used in Photovoltaic Systems. IEEE Trans. Ind. Electron. 2019, 67, 6541–6549. [Google Scholar] [CrossRef]
- Liu, F.; Kang, Y.; Zhang, Y.; Duan, S.; Lin, X. Improved SMS islanding detection method for grid-connected converters. IET Renew. Power Gener. 2010, 4, 36–42. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Shen, Z.; Mattavelli, P. Impedance-Based Analysis of Active Frequency Drift Islanding Detection for Grid-Tied Inverter System. IEEE Trans. Ind. Appl. 2016, 52, 332–341. [Google Scholar] [CrossRef]
- Yafaoui, A.; Wu, B.; Kouro, S. Improved Active Frequency Drift Anti-islanding Detection Method for Grid Connected Photovoltaic Systems. IEEE Trans. Power Electron. 2012, 27, 2367–2375. [Google Scholar] [CrossRef]
- Kunte, R.S.; Gao, W. Comparison and review of islanding detection techniques for distributed energy resources. In Proceedings of the 2008 40th North American Power Symposium, Calgary, AB, Canada, 28–30 September 2008; pp. 1–8. [Google Scholar]
- Wang, X.; Freitas, W.; Xu, W.; Dinavahi, V. Impact of DG Interface Controls on the Sandia Frequency Shift Antiislanding Method. IEEE Trans. Energy Convers. 2007, 22, 792–794. [Google Scholar] [CrossRef]
- Trujillo, C.L.; Velasco, D.; Figueres, E.; Garcerá, G. Analysis of active islanding detection methods for grid-connected microinverters for renewable energy processing. Appl. Energy 2010, 87, 3591–3605. [Google Scholar] [CrossRef] [Green Version]
- Karimi, H.; Yazdani, A.; Iravani, R. Negative-Sequence Current Injection for Fast Islanding Detection of a Distributed Resource Unit. IEEE Trans. Power Electron. 2008, 23, 298–307. [Google Scholar] [CrossRef]
- Menon, V.; Nehrir, M.H. A Hybrid Islanding Detection Technique Using Voltage Unbalance and Frequency Set Point. IEEE Trans. Power Syst. 2007, 22, 442–448. [Google Scholar] [CrossRef]
- Mahat, P.; Chen, Z.; Bak-Jensen, B. A Hybrid Islanding Detection Technique Using Average Rate of Voltage Change and Real Power Shift. IEEE Trans. Power Deliv. 2009, 24, 764–771. [Google Scholar] [CrossRef] [Green Version]
- Ezzt, M.; Marei, M.I.; Abdel-Rahman, M.; Mansour, M.M. A Hybrid Strategy for Distributed Generators Islanding Detection. In Proceedings of the 2007 IEEE Power Engineering Society Conference and Exposition in Africa—PowerAfrica, Johannesburg, South Africa, 16–20 July 2007; pp. 1–7. [Google Scholar]
- Manikonda, S.K.G.; Gaonkar, D.N. Comprehensive review of IDMs in DG systems. IET Smart Grid 2019, 2, 11–24. [Google Scholar] [CrossRef]
- Vahedi, H.; Noroozian, R.; Jalilvand, A.; Gharehpetian, G.B. Hybrid SFS and Q-f Islanding Detection Method for inverter-based DG. In Proceedings of the 2010 IEEE International Conference on Power and Energy, Kuala Lumpur, Malaysia, 29 November–1 December 2010; pp. 672–676. [Google Scholar]
- Xu, W.; Zhang, G.; Li, C.; Wang, W.; Wang, G.; Kliber, J. A Power Line Signaling Based Technique for Anti-Islanding Protection of Distributed Generators—Part I: Scheme and Analysis. IEEE Trans. Power Deliv. 2007, 22, 1758–1766. [Google Scholar] [CrossRef]
- Wang, W.; Kliber, J.; Zhang, G.; Xu, W.; Howell, B.; Palladino, T. A Power Line Signaling Based Scheme for Anti-Islanding Protection of Distributed Generators—Part II: Field Test Results. IEEE Trans. Power Deliv. 2007, 22, 1767–1772. [Google Scholar] [CrossRef]
- Bower, W.I.; Ropp, M. Evaluation of Islanding Detection Methods for Utility-Interactive Inverters in Photovoltaic Systems; SAND2002-3591; TRN: US200304%%116 United States 10.2172/806700; TRN: US200304%%116 SNL English; Sandia National Labs.: Albuquerque, NM, USA; Livermore, CA, USA, 2002; 60p. [Google Scholar]
- Hartmann, N.B.; dos Santos, R.C.; Grilo, A.P.; Vieira, J.C.M. Hardware Implementation and Real-Time Evaluation of an ANN-Based Algorithm for Anti-Islanding Protection of Distributed Generators. IEEE Trans. Ind. Electron. 2018, 65, 5051–5059. [Google Scholar] [CrossRef]
- Merlin, V.L.; Santos, R.C.; Grilo, A.P.; Vieira, J.C.M.; Coury, D.V.; Oleskovicz, M. A new artificial neural network based method for islanding detection of distributed generators. Int. J. Electr. Power Energy Syst. 2016, 75, 139–151. [Google Scholar] [CrossRef]
- ElNozahy, M.S.; El-Saadany, E.F.; Salama, M.M.A. A robust wavelet-ANN based technique for islanding detection. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Abd-Elkader, A.G.; Allam, D.F.; Tageldin, E. Islanding detection method for DFIG wind turbines using artificial neural networks. Int. J. Electr. Power Energy Syst. 2014, 62, 335–343. [Google Scholar] [CrossRef]
- Khamis, A.; Shareef, H.; Mohamed, A.; Bizkevelci, E. Islanding detection in a distributed generation integrated power system using phase space technique and probabilistic neural network. Neurocomputing 2015, 148, 587–599. [Google Scholar] [CrossRef]
- Samantaray, S.R.; Babu, B.C.; Dash, P.K. Probabilistic Neural Network Based Islanding Detection in Distributed Generation. Electr. Power Compon. Syst. 2011, 39, 191–203. [Google Scholar] [CrossRef]
- El-Arroudi, K.; Joos, G.; Kamwa, I.; McGillis, D.T. Intelligent-Based Approach to Islanding Detection in Distributed Generation. IEEE Trans. Power Deliv. 2007, 22, 828–835. [Google Scholar] [CrossRef]
- Lidula, N.W.A.; Rajapakse, A.D. A Pattern Recognition Approach for Detecting Power Islands Using Transient Signals—Part I: Design and Implementation. IEEE Trans. Power Deliv. 2010, 25, 3070–3077. [Google Scholar] [CrossRef]
- Lidula, N.W.A.; Rajapakse, A.D. A Pattern-Recognition Approach for Detecting Power Islands Using Transient Signals—Part II: Performance Evaluation. IEEE Trans. Power Deliv. 2012, 27, 1071–1080. [Google Scholar] [CrossRef]
- Heidari, M.; Seifossadat, G.; Razaz, M. Application of decision tree and discrete wavelet transform for an optimized intelligent-based islanding detection method in distributed systems with distributed generations. Renew. Sustain. Energy Rev. 2013, 27, 525–532. [Google Scholar] [CrossRef]
- Faqhruldin, O.N.; El-Saadany, E.F.; Zeineldin, H.H. A Universal Islanding Detection Technique for Distributed Generation Using Pattern Recognition. IEEE Trans. Smart Grid 2014, 5, 1985–1992. [Google Scholar] [CrossRef]
- Alshareef, S.; Talwar, S.; Morsi, W.G. A New Approach Based on Wavelet Design and Machine Learning for Islanding Detection of Distributed Generation. IEEE Trans. Smart Grid 2014, 5, 1575–1583. [Google Scholar] [CrossRef]
- Matic-Cuka, B.; Kezunovic, M. Islanding Detection for Inverter-Based Distributed Generation Using Support Vector Machine Method. IEEE Trans. Smart Grid 2014, 5, 2676–2686. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mlakić, D.; Nikolovski, S.; Dragičević, T. Support Vector Machine-based Islanding and Grid Fault Detection in Active Distribution Networks. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 2385–2403. [Google Scholar] [CrossRef]
- Alam, M.R.; Begum, M.T.A.; Mather, B. Islanding Detection of Distributed Generation using Electrical Variables in Space Vector Domain. IEEE Trans. Power Deliv. 2019, 35, 861–870. [Google Scholar] [CrossRef]
- Mohanty, S.R.; Kishor, N.; Ray, P.K.; Catalo, J.P.S. Comparative Study of Advanced Signal Processing Techniques for Islanding Detection in a Hybrid Distributed Generation System. IEEE Trans. Sustain. Energy 2015, 6, 122–131. [Google Scholar] [CrossRef]
- Rosolowski, E.; Burek, A.; Jedut, L. A New Method for Islanding Detection in Distributed Generation; Wroclaw University of Technology: Wrocław, Poland, 2007. [Google Scholar]
- Dash, P.K.; Padhee, M.; Panigrahi, T.K. A hybrid time—Frequency approach based fuzzy logic system for power island detection in grid connected distributed generation. Int. J. Electr. Power Energy Syst. 2012, 42, 453–464. [Google Scholar] [CrossRef]
- Samantaray, S.R.; El-Arroudi, K.; Joos, G.; Kamwa, I. A Fuzzy Rule-Based Approach for Islanding Detection in Distributed Generation. IEEE Trans. Power Deliv. 2010, 25, 1427–1433. [Google Scholar] [CrossRef]
- Kumarswamy, I.; Sandipamu, T.K.; Prasanth, V. Analysis of Islanding Detection in Distributed Generation Using Fuzzy Logic Technique. In Proceedings of the 2013 7th Asia Modelling Symposium, Hong Kong, China, 23–25 July 2013; pp. 3–7. [Google Scholar]
- Kim, M.-S.; Haider, R.; Cho, G.-J.; Kim, C.-H.; Won, C.-Y.; Chai, J.-S. Comprehensive Review of Islanding Detection Methods for Distributed Generation Systems. Energies 2019, 12, 837. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Xu, W.; Huang, C.; Fan, X. New islanding detection method with adaptively threshold for microgrid. Electr. Power Syst. Res. 2021, 195, 107167. [Google Scholar] [CrossRef]
- Azzaoui, M.E.L. Islanding detection method for distributed generation with wavelet based nuisance tripping suppression. Electr. Power Syst. Res. 2021, 199, 107366. [Google Scholar] [CrossRef]
- Serrano-Fontova, A.; Martinez, J.A.; Casals-Torrens, P.; Bosch, R. A robust islanding detection method with zero-non-detection zone for distribution systems with DG. Int. J. Electr. Power Energy Syst. 2021, 133, 107247. [Google Scholar] [CrossRef]
- Dutta, S.; Olla, S.; Sadhu, P.K. A secured, reliable and accurate unplanned island detection method in a renewable energy based microgrid. Eng. Sci. Technol. Int. J. 2021, 24, 1102–1115. [Google Scholar] [CrossRef]
- Kim, H.-M.; Lim, Y.; Kinoshita, T. An Intelligent Multiagent System for Autonomous Microgrid Operation. Energies 2012, 5, 3347–3362. [Google Scholar] [CrossRef] [Green Version]
- Lidula, N.W.A.; Rajapakse, A.D. Microgrids research: A review of experimental microgrids and test systems. Renew. Sustain. Energy Rev. 2011, 15, 186–202. [Google Scholar] [CrossRef]
- Olivares, D.E.; Cañizares, C.A.; Kazerani, M. A centralized optimal energy management system for microgrids. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Strasser, T.; Andrén, F.; Kathan, J.; Cecati, C.; Buccella, C.; Siano, P.; Leitão, P.; Zhabelova, G.; Vyatkin, V.; Vrba, P.; et al. A Review of Architectures and Concepts for Intelligence in Future Electric Energy Systems. IEEE Trans. Ind. Electron. 2015, 62, 2424–2438. [Google Scholar] [CrossRef] [Green Version]
- Vasiljevska, J.; Lopes, J.A.P.; Matos, M.A. Integrated micro-generation, load and energy storage control functionality under the multi micro-grid concept. Electr. Power Syst. Res. 2013, 95, 292–301. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M. Multi-agent system for energy resource scheduling of integrated microgrids in a distributed system. Electr. Power Syst. Res. 2011, 81, 138–148. [Google Scholar] [CrossRef]
- Foo, Y.S.E.; Gooi, H.B.; Chen, S.X. Multi agent system for distributed management of microgrids. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Detroit, MI, USA, 26–30 July 2015; p. 1. [Google Scholar]
- Wang, Y.; Mao, S.; Nelms, R.M. On Hierarchical Power Scheduling for the Macrogrid and Cooperative Microgrids. IEEE Trans. Ind. Inform. 2015, 11, 1574–1584. [Google Scholar] [CrossRef]
- Wu, J.; Guan, X. Coordinated Multi-Microgrids Optimal Control Algorithm for Smart Distribution Management System. IEEE Trans. Smart Grid 2013, 4, 2174–2181. [Google Scholar] [CrossRef]
- Kanzow, C.; Yamashita, N.; Fukushima, M. Levenberg–Marquardt methods with strong local convergence properties for solving nonlinear equations with convex constraints. J. Comput. Appl. Math. 2004, 172, 375–397. [Google Scholar] [CrossRef] [Green Version]
- Jain, M.; Singh, V.; Rani, A. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2019, 44, 148–175. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95, the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1989; p. 372. [Google Scholar]
- Sukumar, S.; Mokhlis, H.; Mekhilef, S.; Naidu, K.; Karimi, M. Mix-mode energy management strategy and battery sizing for economic operation of grid-tied microgrid. Energy 2017, 118, 1322–1333. [Google Scholar] [CrossRef] [Green Version]
- Amrollahi, M.H.; Bathaee, S.M.T. Techno-economic optimization of hybrid photovoltaic/wind generation together with energy storage system in a stand-alone micro-grid subjected to demand response. Appl. Energy 2017, 202, 66–77. [Google Scholar] [CrossRef]
- Anglani, N.; Oriti, G.; Colombini, M. Optimized Energy Management System to Reduce Fuel Consumption in Remote Military Microgrids. IEEE Trans. Ind. Appl. 2017, 53, 5777–5785. [Google Scholar] [CrossRef]
- Comodi, G.; Giantomassi, A.; Severini, M.; Squartini, S.; Ferracuti, F.; Fonti, A.; Cesarini, D.N.; Morodo, M.; Polonara, F. Multi-apartment residential microgrid with electrical and thermal storage devices: Experimental analysis and simulation of energy management strategies. Appl. Energy 2015, 137, 854–866. [Google Scholar] [CrossRef]
- Igualada, L.; Corchero, C.; Cruz-Zambrano, M.; Heredia, F. Optimal Energy Management for a Residential Microgrid Including a Vehicle-to-Grid System. IEEE Trans. Smart Grid 2014, 5, 2163–2172. [Google Scholar] [CrossRef] [Green Version]
- Shen, J.; Jiang, C.; Liu, Y.; Qian, J. A Microgrid Energy Management System with Demand Response for Providing Grid Peak Shaving. Electr. Power Compon. Syst. 2016, 44, 843–852. [Google Scholar] [CrossRef]
- Hussain, A.; Bui, V.; Kim, H. A Resilient and Privacy-Preserving Energy Management Strategy for Networked Microgrids. IEEE Trans. Smart Grid 2018, 9, 2127–2139. [Google Scholar] [CrossRef]
- Vergara, P.P.; López, J.C.; da Silva, L.C.P.; Rider, M.J. Security-constrained optimal energy management system for three-phase residential microgrids. Electr. Power Syst. Res. 2017, 146, 371–382. [Google Scholar] [CrossRef]
- Olivares, D.E.; Cañizares, C.A.; Kazerani, M. A Centralized Energy Management System for Isolated Microgrids. IEEE Trans. Smart Grid 2014, 5, 1864–1875. [Google Scholar] [CrossRef]
- Helal, S.A.; Najee, R.J.; Hanna, M.O.; Shaaban, M.F.; Osman, A.H.; Hassan, M.S. An energy management system for hybrid microgrids in remote communities. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Panwar, L.K.; Konda, S.R.; Verma, A.; Panigrahi, B.K.; Kumar, R. Operation window constrained strategic energy management of microgrid with electric vehicle and distributed resources. IET Gener. Transm. Distrib. 2017, 11, 615–626. [Google Scholar] [CrossRef]
- Lee, H.; Byeon, G.; Jeon, J.; Hussain, A.; Kim, H.; Rousis, A.O.; Strbac, G. An Energy Management System With Optimum Reserve Power Procurement Function for Microgrid Resilience Improvement. IEEE Access 2019, 7, 42577–42585. [Google Scholar] [CrossRef]
- Heymann, B.; Bonnans, J.F.; Martinon, P.; Silva, F.J.; Lanas, F.; Jiménez-Estévez, G. Continuous optimal control approaches to microgrid energy management. Energy Syst. 2015, 9, 59–77. [Google Scholar] [CrossRef] [Green Version]
- Luu Ngoc, A.; Tran, Q.-T. Optimal energy management for grid connected microgrid by using dynamic programming method. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Wu, N.; Wang, H. Deep learning adaptive dynamic programming for real time energy management and control strategy of micro-grid. J. Clean. Prod. 2018, 204, 1169–1177. [Google Scholar] [CrossRef]
- Almada, J.B.; Leão, R.P.S.; Sampaio, R.F.; Barroso, G.C. A centralized and heuristic approach for energy management of an AC microgrid. Renew. Sustain. Energy Rev. 2016, 60, 1396–1404. [Google Scholar] [CrossRef]
- Kanchev, H.; Lu, D.; Colas, F.; Lazarov, V.; Francois, B. Energy Management and Operational Planning of a Microgrid With a PV-Based Active Generator for Smart Grid Applications. IEEE Trans. Ind. Electron. 2011, 58, 4583–4592. [Google Scholar] [CrossRef] [Green Version]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R.; Ghias, A.M.Y.M. Energy Management and Control System for Laboratory Scale Microgrid Based Wind-PV-Battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Sechilariu, M.; Wang, B.; Locment, F. Building-integrated microgrid: Advanced local energy management for forthcoming smart power grid communication. Energy Build. 2013, 59, 236–243. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Wang, Y.; Zeng, M.; Li, F.; Wang, Y.; Zhang, Y. Energy management of smart micro-grid with response loads and distributed generation considering demand response. J. Clean. Prod. 2018, 197, 1069–1083. [Google Scholar] [CrossRef]
- Chalise, S.; Sternhagen, J.; Hansen, T.M.; Tonkoski, R. Energy management of remote microgrids considering battery lifetime. Electr. J. 2016, 29, 1–10. [Google Scholar] [CrossRef]
- Askarzadeh, A. A Memory-Based Genetic Algorithm for Optimization of Power Generation in a Microgrid. IEEE Trans. Sustain. Energy 2018, 9, 1081–1089. [Google Scholar] [CrossRef]
- Golshannavaz, S.; Afsharnia, S.; Siano, P. A comprehensive stochastic energy management system in reconfigurable microgrids. Int. J. Energy Res. 2016, 40, 1518–1531. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S.; Cai, T.; Liu, B.; Hu, G. Smart energy management system for optimal microgrid economic operation. IET Renew. Power Gener. 2011, 5, 258–267. [Google Scholar] [CrossRef]
- Radosavljević, J.; Jevtić, M.; Klimenta, D. Energy and operation management of a microgrid using particle swarm optimization. Eng. Optim. 2016, 48, 811–830. [Google Scholar] [CrossRef]
- Alavi, S.A.; Ahmadian, A.; Aliakbar-Golkar, M. Optimal probabilistic energy management in a typical micro-grid based-on robust optimization and point estimate method. Energy Convers. Manag. 2015, 95, 314–325. [Google Scholar] [CrossRef]
- Gholami, K.; Dehnavi, E. A modified particle swarm optimization algorithm for scheduling renewable generation in a micro-grid under load uncertainty. Appl. Soft Comput. 2019, 78, 496–514. [Google Scholar] [CrossRef]
- Moghaddas-Tafreshi, S.M.; Mohseni, S.; Karami, M.E.; Kelly, S. Optimal energy management of a grid-connected multiple energy carrier micro-grid. Appl. Therm. Eng. 2019, 152, 796–806. [Google Scholar] [CrossRef]
- Abedini, M.; Moradi, M.H.; Hosseinian, S.M. Optimal management of microgrids including renewable energy scources using GPSO-GM algorithm. Renew. Energy 2016, 90, 430–439. [Google Scholar] [CrossRef]
- Moghaddam, A.A.; Seifi, A.; Niknam, T.; Pahlavani, M.R.A. Multi-objective operation management of a renewable MG (micro-grid) with back-up micro-turbine/fuel cell/battery hybrid power source. Energy 2011, 36, 6490–6507. [Google Scholar] [CrossRef]
- Aghajani, G.; Ghadimi, N. Multi-objective energy management in a micro-grid. Energy Rep. 2018, 4, 218–225. [Google Scholar] [CrossRef]
- Mohan, V.; Singh, J.G.; Ongsakul, W. An efficient two stage stochastic optimal energy and reserve management in a microgrid. Appl. Energy 2015, 160, 28–38. [Google Scholar] [CrossRef]
- Tiwari, N.; Srivastava, L. Generation scheduling and micro-grid energy management using differential evolution algorithm. In Proceedings of the 2016 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 18–19 March 2016; pp. 1–7. [Google Scholar]
- Marzband, M.; Yousefnejad, E.; Sumper, A.; Domínguez-García, J.L. Real time experimental implementation of optimum energy management system in standalone Microgrid by using multi-layer ant colony optimization. Int. J. Electr. Power Energy Syst. 2016, 75, 265–274. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, S.; Soleymani, S.; Mozafari, B. Scenario-based stochastic operation management of MicroGrid including Wind, Photovoltaic, Micro-Turbine, Fuel Cell and Energy Storage Devices. Int. J. Electr. Power Energy Syst. 2014, 54, 525–535. [Google Scholar] [CrossRef]
- Arefifar, S.A.; Ordonez, M.; Mohamed, Y.A.R.I. Energy Management in Multi-Microgrid Systems—Development and Assessment. IEEE Trans. Power Syst. 2017, 32, 910–922. [Google Scholar] [CrossRef]
- Marzband, M.; Azarinejadian, F.; Savaghebi, M.; Guerrero, J.M. An Optimal Energy Management System for Islanded Microgrids Based on Multiperiod Artificial Bee Colony Combined With Markov Chain. IEEE Syst. J. 2017, 11, 1712–1722. [Google Scholar] [CrossRef] [Green Version]
- Alsmadi, Y.M.; Abdel-hamed, A.M.; Ellissy, A.E.; El-Wakeel, A.S.; Abdelaziz, A.Y.; Utkin, V.; Uppal, A.A. Optimal configuration and energy management scheme of an isolated micro-grid using Cuckoo search optimization algorithm. J. Frankl. Inst. 2019, 356, 4191–4214. [Google Scholar] [CrossRef]
- Arcos-Aviles, D.; Pascual, J.; Guinjoan, F.; Marroyo, L.; Sanchis, P.; Marietta, M.P. Low complexity energy management strategy for grid profile smoothing of a residential grid-connected microgrid using generation and demand forecasting. Appl. Energy 2017, 205, 69–84. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, Y.; Song, C.; Chen, Y. Design and Implementation of Energy Management System With Fuzzy Control for DC Microgrid Systems. IEEE Trans. Power Electron. 2013, 28, 1563–1570. [Google Scholar] [CrossRef]
- Banaei, M.; Rezaee, B. Fuzzy scheduling of a non-isolated micro-grid with renewable resources. Renew. Energy 2018, 123, 67–78. [Google Scholar] [CrossRef]
- Chaouachi, A.; Kamel, R.M.; Andoulsi, R.; Nagasaka, K. Multiobjective Intelligent Energy Management for a Microgrid. IEEE Trans. Ind. Electron. 2013, 60, 1688–1699. [Google Scholar] [CrossRef]
- Roy, K.; Mandal, K.K.; Mandal, A.C. Ant-Lion Optimizer algorithm and recurrent neural network for energy management of micro grid connected system. Energy 2019, 167, 402–416. [Google Scholar] [CrossRef]
- Urias, M.E.G.; Sanchez, E.N.; Ricalde, L.J. Electrical microgrid optimization via a new recurrent neural network. IEEE Syst. J. 2014, 9, 945–953. [Google Scholar] [CrossRef]
- Kuznetsova, E.; Li, Y.-F.; Ruiz, C.; Zio, E.; Ault, G.; Bell, K. Reinforcement learning for microgrid energy management. Energy 2013, 59, 133–146. [Google Scholar] [CrossRef]
- Ghorbani, S.; Rahmani, R.; Unland, R. Multi-Agent Autonomous Decision Making in Smart Micro-Grids’ Energy Management: A Decentralized Approach. In Multiagent System Technologies; Berndt, J., Petta, P., Unland, R., Eds.; MATES 2017. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; Volume 10413, pp. 223–237. [Google Scholar] [CrossRef]
- Bogaraj, T.; Kanakaraj, J. Intelligent energy management control for independent microgrid. Sadhana 2016, 41, 755–769. [Google Scholar] [CrossRef] [Green Version]
- Keshta, H.E.; Ali, A.A.; Saied, E.M.; Bendary, F.M. Real-time operation of multi-micro-grids using a multi-agent system. Energy 2019, 174, 576–590. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Rahimi-Kian, A.; Mirian, M.S.; Guerrero, J.M. A multi-agent based energy management solution for integrated buildings and microgrid system. Appl. Energy 2017, 203, 41–56. [Google Scholar] [CrossRef] [Green Version]
- Karavas, C.-S.; Kyriakarakos, G.; Arvanitis, K.G.; Papadakis, G. A multi-agent decentralized energy management system based on distributed intelligence for the design and control of autonomous polygeneration microgrids. Energy Convers. Manag. 2015, 103, 166–179. [Google Scholar] [CrossRef]
- Zhou, Z.; Xiong, F.; Huang, B.; Xu, C.; Jiao, R.; Liao, B.; Yin, Z.; Li, J. Game-Theoretical Energy Management for Energy Internet With Big Data-Based Renewable Power Forecasting. IEEE Access 2017, 5, 5731–5746. [Google Scholar] [CrossRef]
- Liu, N.; Yu, X.; Wang, C.; Wang, J. Energy Sharing Management for Microgrids With PV Prosumers: A Stackelberg Game Approach. IEEE Trans. Ind. Inform. 2017, 13, 1088–1098. [Google Scholar] [CrossRef]
- Ma, L.; Liu, N.; Zhang, J.; Tushar, W.; Yuen, C. Energy Management for Joint Operation of CHP and PV Prosumers Inside a Grid-Connected Microgrid: A Game Theoretic Approach. IEEE Trans. Ind. Inform. 2016, 12, 1930–1942. [Google Scholar] [CrossRef]
- Mohamed, F.A.; Koivo, H.N. Multiobjective optimization using modified game theory for online management of microgrid. Eur. Trans. Electr. Power 2011, 21, 839–854. [Google Scholar] [CrossRef]
- Jia, K.; Chen, Y.; Bi, T.; Lin, Y.; Thomas, D.; Sumner, M. Historical-Data-Based Energy Management in a Microgrid With a Hybrid Energy Storage System. IEEE Trans. Ind. Inform. 2017, 13, 2597–2605. [Google Scholar] [CrossRef] [Green Version]
- Cau, G.; Cocco, D.; Petrollese, M.; Kær, S.K.; Milan, C. Energy management strategy based on short-term generation scheduling for a renewable microgrid using a hydrogen storage system. Energy Convers. Manag. 2014, 87, 820–831. [Google Scholar] [CrossRef]
- Su, W.; Wang, J.; Roh, J. Stochastic Energy Scheduling in Microgrids With Intermittent Renewable Energy Resources. IEEE Trans. Smart Grid 2014, 5, 1876–1883. [Google Scholar] [CrossRef]
- Hu, M.-C.; Lu, S.-Y.; Chen, Y.-H. Stochastic programming and market equilibrium analysis of microgrids energy management systems. Energy 2016, 113, 662–670. [Google Scholar] [CrossRef]
- Kuznetsova, E.; Li, Y.-F.; Ruiz, C.; Zio, E. An integrated framework of agent-based modelling and robust optimization for microgrid energy management. Appl. Energy 2014, 129, 70–88. [Google Scholar] [CrossRef]
- Xiang, Y.; Liu, J.; Liu, Y. Robust Energy Management of Microgrid with Uncertain Renewable Generation and Load. IEEE Trans. Smart Grid 2016, 7, 1034–1043. [Google Scholar] [CrossRef]
- Zhang, Y.; Gatsis, N.; Giannakis, G.B. Robust Energy Management for Microgrids With High-Penetration Renewables. IEEE Trans. Sustain. Energy 2013, 4, 944–953. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Zhao, C. Islanding-Aware Robust Energy Management for Microgrids. IEEE Trans. Smart Grid 2018, 9, 1301–1309. [Google Scholar] [CrossRef]
- Hu, W.; Wang, P.; Gooi, H.B. Toward optimal energy management of microgrids via robust two-stage optimization. IEEE Trans. Smart Grid 2018, 9, 1161–1174. [Google Scholar] [CrossRef]
- Ali, M.; Prakash, K.; Hossain, M.A.; Pota, H.R. Intelligent energy management: Evolving developments, current challenges, and research directions for sustainable future. J. Clean. Prod. 2021, 314, 127904. [Google Scholar] [CrossRef]
- Fan, X.; Liu, B.; Liu, J.; Ding, J.; Han, X.; Deng, Y.; Lv, X.; Xie, Y.; Chen, B.; Hu, W.; et al. Battery Technologies for Grid-Level Large-Scale Electrical Energy Storage. Trans. Tianjin Univ. 2020, 26, 92–103. [Google Scholar] [CrossRef] [Green Version]
- Byrne, R.H.; Nguyen, T.A.; Copp, D.A.; Chalamala, B.R.; Gyuk, I. Energy Management and Optimization Methods for Grid Energy Storage Systems. IEEE Access 2018, 6, 13231–13260. [Google Scholar] [CrossRef]
- Roslan, M.F.; Hannan, M.A.; Ker, P.J.; Uddin, M.N. Microgrid control methods toward achieving sustainable energy management. Appl. Energy 2019, 240, 583–607. [Google Scholar] [CrossRef]
- Kabalci, Y. A survey on smart metering and smart grid communication. Renew. Sustain. Energy Rev. 2016, 57, 302–318. [Google Scholar] [CrossRef]
- Marzal, S.; Salas, R.; González-Medina, R.; Garcerá, G.; Figueres, E. Current challenges and future trends in the field of communication architectures for microgrids. Renew. Sustain. Energy Rev. 2018, 82, 3610–3622. [Google Scholar] [CrossRef] [Green Version]
- Basak, P.; Chowdhury, S.; Halder nee Dey, S.; Chowdhury, S.P. A literature review on integration of distributed energy resources in the perspective of control, protection and stability of microgrid. Renew. Sustain. Energy Rev. 2012, 16, 5545–5556. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Conversion | Merits | Demerits | Refs |
|---|---|---|---|---|
| ACMG | DC loads require an AC–DC converter; AC loads can easily connect to the bus | Easy reconfiguration; easy voltage transformation and regulation | Requires vast and complicated power electronic devices to integrate DGs into the UG; difficult to synchronize the voltage magnitude, frequency, and phase angle with the existing UG | [14,15,20] |
| DCMG | Requires a DC–DC converter and DC–AC inverter | Few converters are necessary; DC loads can easily connect to the bus; no synchronization required | Reconfiguration with the existing UG is complicated; difficult to produce an AC voltage; difficult to maintain a standardized voltage level | [14,21] |
| Hybrid MG | A transformer is used on the AC side, and a DC–DC converter is used on the DC side | Both AC and DC loads can easily connect to the bus; less energy loss | Difficult to manage and control; complex architecture | [22,23] |
| Standard | Detection Time | Quality Factor | Frequency (Hz) | Voltage (p.u.) |
|---|---|---|---|---|
| IEEE 1547 | t < 2 s | 1 | 59.3 ≤ f ≤ 60.5 | 0.88 ≤ V ≤ 1.1 |
| IEEE 929-2000 | t < 2 s | 2.5 | 59.3 ≤ f ≤ 60.5 | 0.88 ≤ V ≤ 1.1 |
| UL 1741 | t < 2 s | 2.5 | 59.3 ≤ f ≤ 60.5 | 0.88 ≤ V ≤ 1.1 |
| IEC 62116 | t < 2 s | 1 | (fo − 1.5) ≤ f ≤ (fo + 1.5) | 0.85 ≤ V ≤ 1.15 |
| VDE 0126-1-1 | t < 0.2s | 2 | 47.5 ≤ f ≤ 50.5 | 0.88 ≤ V ≤ 1.1 |
| Canadian C22.2 | t < 0.2s | 2.5 | 59.5 ≤ f ≤ 60.5 | 0.88 ≤ V ≤ 1.06 |
| UK G83/2 or UK G83/3 | t < 0.5s | 0.5 | 47.5 ≤ f ≤ 51.5 (Stage 1) 47 ≤ f ≤ 52 (Stage 2) | 0.87 ≤ V ≤ 1.1 (Stage 1) 0.8 ≤ V ≤ 1.19 (Stage 2) |
| Korean standard | t < 0.5s | 1 | 59.3 ≤ f ≤ 60 | 0.88 ≤ V ≤ 1.1 |
| AS4777.3-2005 | t < 2 s | 1 | Setting value | Setting value |
| Japanese standard | Passive: t < 0.5 s Active: 0.5 s < t < 1 s | 0 (+ rotating machinery) | Setting value | Setting value |
| IDT | NDR | Detection Speed | Error Detection Rate | Implementation and Speed | Improvement | Ref |
|---|---|---|---|---|---|---|
| UOV/ UOF | Large | 4 ms to 2 s | - | Easy but reaction time is variable | Additional parameter is implemented with the UOV/UOF | [36,37,38] |
| THD | Large with a high Q factor | 45 ms | High | Easy but challenging to define a threshold | [36,40] | |
| PJD | - | 10 to 20 ms | High | Complicated implementation, challenging to define a threshold | Controlled using a PLL | [41] |
| RCF | small | 24 ms | High | Easy but selection of threshold is difficult | - | [43,45] |
| RCP | Smaller than UOV/UOF | 24 to 26 ms | - | More complicated than UOV/UOF | - | [43] |
| VU | - | 53 ms | Low | Easy for a three-phase system | Combining VU and THD to enhance the performance | [47,48] |
| IDTs | NDR | Detection Speed | Error Detection (ED) Rate | Implementation and Speed | Weakness | Ref. |
|---|---|---|---|---|---|---|
| IM | NDR small for a single system | 0.77 to 0.95 s | - | Easy and fast | Performance declines with multiple-inverter systems | [29,36,40] |
| SMFS | NDR smaller than AFD | Approx. 0.4 s | Low | Easy and medium | PQ and transient stability problems | [34,50] |
| AFD | NDR increases with higher Q | Approx. 2 s | High | Easy and medium | Performance declines with multiple-inverter systems | [29,47,52] |
| SFS | Smallest NDR | Approx. 0.5 s | Low | Complex but fast | PQ and transient stability problems | [31,53] |
| SVS | Smaller than UOV/UOF | Low | Medium and fast | Degrades PQ | [40] | |
| NSC injection | No NDR | 60 ms | Low | - | Degrades PQ; less stable operation | [56] |
| IDTs | NDR | ED Rate | Implementation and Speed | Weakness | Ref |
|---|---|---|---|---|---|
| VU and frequency set point | Small | Low | Complex and fast | Slightly degrades PQ; slow for ID | [57] |
| Voltage and real power shift | - | Low | Complex and moderately fast | Only effective at unity PF | [58] |
| Voltage fluctuation injection | NDR is reduced when RCF is employed with an active technique | Low | Complex and moderately fast | Only useful in a complicated system | [36,59] |
| Hybrid SFS and Q–f approach | Small | Low | Complex and moderately fast | Needs an additional tool to calculate the optimal gain | [61] |
| VU with SFS and SVS | Small | None | Complex but fast | Only useful in a complicated system | [57] |
| Techniques | Advantages | Disadvantages | Improvement | Ref. |
|---|---|---|---|---|
| PLCC | Suitable for multi-inverter systems no NDR; no effect on UG transient response | High cost of implementation | - | [62,63] |
| SGD | Easy to implement; no NDR | Expensive | Need advanced communication to transfer signals; | [29] |
| SCADA | Communicates with all DGs; additional control of DG | Complicated; costly process; | Direct transfer trip may escape MG isolation | [40] |
| Classifier | Effectiveness of the Classifier | Weakness of the Classifier | Ref. |
|---|---|---|---|
| ANN | Easy implementation | Generally, needs to train the classifier | [65,66] |
| PNN | Computational ease | Effective for conventional pattern recognition | [69,70] |
| DT | Quick training | Inconvenient for un-correlated variables | [72,73,74] |
| SVM | Reduce training error | Selection of parameters is difficult | [77,79] |
| FL | Easy implementation | Not robust | [82,85] |
| IDT | Advantages | Disadvantages | Improvement |
|---|---|---|---|
| Passive technique | No impact on PQ; Detection speed is fast | NDR is large; ED rate is higher than active technique | An improved passive technique considering the voltage/frequency behavior of the load and adaptively thresholdcan significantly reduce the NDR [86]. |
| Active technique | NDR is small; ED rate is less | Deteriorates PQ | A modified reactive power control approach can detect ID with negligible NDR. This method does not deteriorate PQ [87]. |
| Hybrid technique | NDR is very small; ED rate is low | Slightly deteriorates PQ; Only effective for a complicated system | A hybrid converter-based ID can achieve zero-NDR and does not degrade PQ [88]. |
| Communication based technique | No NDR; No impact on PQ; ED can be eliminated | Need a large amount of investment; Not economical for the small system | Various devices like smart meters, phasor measurement unit can be applied for ID. This can significantly reduce the implementation time and cost making it practical and economically viable. |
| Intelligent technique | Easy implementation; No threshold selection is required | Need to train classifier; Parameter selection is difficult; Large computational burden | Advanced digital signal processing methods combined with a learning algorithm can be an effective tool for ID [89]. |
| EMS | Advantages | Disadvantages | Ref |
|---|---|---|---|
| Centralized | Maintains the energy balance of the entire network; efficiently utilizes each MG component; low operating cost; simple implementation; trading is cost-effective | Massive communication structure is required; computational burden; unable to protect consumer privacy; entire system’s validation is required even for a single modification | [90,91,92,93] |
| Decentralized | Protects consumer privacy; computational burden is distributed; flexible for plug-and-play functionality | Excessive power trading in the grid-tied mode; high operating cost; less resilient in the islanded mode | [90,94,95] |
| Hybrid | Protects consumer privacy; computational burden is distributed; flexible for plug-and-play functionality; more flexible than a centralized approach; lower operating cost than the decentralized approach | Only useful for MGs connected in parallel; cannot ensure consumer privacy; less resilient with disconnected MGs; MGs may operate autonomously if the central approach is compromised | [94,96,97,98] |
| Major Considerations | Research Objective | Suggested Technique | Limitations | Unpredictability-Handling Technique | Ref. |
|---|---|---|---|---|---|
| Power trading; ESSs, fuel cell; | Optimal MG operation; ESS sizing; | LP | Higher DOD, which leads to a quick degradation | Predicted | [103] |
| energy consumption planning; minimize peak demand; | MG sizing | MILP | No TG was incorporated to handle fluctuations of RES | Predicted | [104] |
| energy trading | Minimizing MG operating cost | MILP | Battery adoption was discouraged due to the higher investment cost | Radial NN | [106] |
| Includes energy trading, battery wear, and load-shedding penalty costs | Minimizing MG operating cost | MILP | Impacts of the EV plug-and-play feature were not considered in the MG performance | Predicted | [107] |
| UG peak shaving; DR loads | Maximizing daily revenues | MILP; CPLEX software; | ESSs were not considered; intermittency was not considered | Predicted | [108] |
| Hybrid AC/DC MG | Minimizing MG running cost; maximizing revenues | MILP; CPLEX software; | DR was not considered; the plug-and-play feature was ignored; computational complexity was ignored | Predicted | [109] |
| Load-shedding cost; three-phase EMS power flow | Minimizing MG running cost | MILP | DR and energy losses were ignored | Predicted | [110] |
| EMS for isolated MG; forfeit cost of reactive power | Minimizing fuel and operating cost of TGs | MILP; NLP | DR was not considered | Predicted | [111] |
| energy sharing; price bids for MG involvement in the electricity market | Minimizing MG operating cost Maximizing revenues; | NLP | ESSs were ignored | Predicted | [113] |
| voltage security; backward–forward sweep power flow | Minimizing MG operating cost | NLP | DER functional cost was overlooked | Predicted | [114] |
| resilient EMS; reserve power procurement approach | Minimizing generation and electricity exchange costs; | MILP | Uncertainty in generation was disregarded; DR was ignored | Predicted | [115] |
| TG operating cost; load shedding cost | Minimizing computation time | DP | DR was ignored; higher DOD caused rapid degradation | Predicted | [116] |
| Dynamic energy prices | Minimizing energy exchange and battery aging cost | DP | Computational complexity was ignored | Predicted | [117] |
| Deep-learning approach; real-time energy management | Maximizing the RES utilization; Minimizing emissions | DP | DR was ignored; RES uncertainty was ignored | Predicted | [118] |
| Fuel cell; PSCAD/EMTDC software | Optimal MG operation | RB | DR was overlooked; ESSs was disregarded | Predicted | [119] |
| Prosumer concept | Optimal MG operation | RB | DR was not considered; emission cost was not considered | Predicted | [120] |
| DC-bus voltage; battery SOC | Optimal MG operation | RB | DR and operating cost were not considered | Predicted | [122] |
| Major Considerations | Research Objective | Suggested Technique | Limitations | Unpredictability-Handling Technique | Ref. |
|---|---|---|---|---|---|
| DR approach; different tariff strategies for DR approach | Minimizing operating cost | GA | Unpredictability is ignored; power loss is ignored | Predicted | [123] |
| Battery deterioration cost; cost-effective load dispatch | Minimizing MG operating cost | GA | TG emission cost is ignored | Predicted | [124] |
| DER cost; optimal scheduling | Minimizing MG operating cost | Modified GA | ESS is not considered | Predicted | [125] |
| Active and reactive power reserve costs | Minimizing MG running cost | GA | ESS is not considered; power losses are ignored | Scenario-based probabilistic approach | [126] |
| DER price bids | Minimizing MG running cost | Matrix real-coded GA | DR is ignored | NN approach | [127] |
| Fluctuations of generations, loads, electricity prices | Minimizing MG running cost | PSO | DR is ignored;TG emission cost is ignored | Point estimate method | [128] |
| Fluctuations of RESs | Optimal MG operation | PSO | Power losses are ignored; higher DOD, leading to quick degradation | Point estimate method | [129] |
| Load demand uncertainty; transmission power loss | Minimizing electricity generation cost | Modified PSO | DR is ignored; RES uncertainty is ignored; ESS is ignored | Scenario-based approach | [130] |
| Uncertainties of wind power generation; variations of electrical and thermal loads; DR approach | Minimizing operating cost | PSO | Energy losses are ignored; price variations are ignored | Monte Carlo simulation | [131] |
| MG operation, maintenance, and capital costs | Optimal MG operation | Convergence-based PSO | TG emission cost and power losses are ignored | Predicted | [132] |
| Day-ahead price forecasts | Reducing running and emission costs | Adaptive modified PSO | Sizing of the generators is ignored; DR is ignored | Predicted | [133] |
| Emission cost; energy trading cost | Optimal MG operation | Stochastic-PSO | DR is ignored; power losses are ignored | Affine arithmetic | [135] |
| DR approach; peak-shaving demand | Minimizing MG running and emission costs | Differential evolution | Battery DOD cost is ignored | Predicted | [136] |
| DR incentives; RES price bidding | Reducing electricity production cost | Ant colony optimization | TG emission cost is ignored | Predicted | [137] |
| Fluctuations of RESs; variable electricity prices | Minimizing MG running cost | Modified firefly | TG emission cost is ignored | Scenario-based probabilistic approach | [138] |
| Probabilistic index | Minimizing MG running cost; reducing power loss | Tabu search | Computational complexity is ignored | Scenario-generation approach | [139] |
| Fluctuations of RESs and load demand; DR approach | Minimizing MG running cost | Artificial bee colony | Battery DOD cost is ignored; power losses are ignored | NN with Markov chain method | [140] |
| Tax on emissions | Minimizing the total cost | Cuckoo search optimization | DR is ignored; computational complexity is ignored | Predicted | [141] |
| Major Considerations | Research Objective | Suggested Technique | Limitations | Unpredictability-Handling Technique | Ref. |
|---|---|---|---|---|---|
| Energy sharing; battery SOC | Minimizing power variations and peak demands | FL | Voltage and frequency controls are ignored | Predicted | [142] |
| Li-ion battery; usage of RESs | Optimal MG operation | FL | DR is ignored; battery SOC is limited | Predicted | [143] |
| Unpredictably of RESs and load demand; Energy trading; unpredictably of line capacity | Best scheduling of MG | Fuzzy MILP approach | DR is ignored; emission cost is not considered | FL | [144] |
| Unpredictably of RESs and load demand | Minimizing MG running cost Minimizing emission cost | FL | DR is ignored; computational complexity is ignored | ANN | [145] |
| Battery SOC; DR approach | Reducing electricity production cost; maximizing RESs utilization | Ant–lion optimizer | Emission cost is ignored; no TG is incorporated to handle RES fluctuations; suboptimal solution | Predicted | [146] |
| Reducing power imports | Maximizing the use of RESs | Recurrent NN | DR is ignored; computational complexity is ignored | Kalman filter-based NN approach | [147] |
| Hour-ahead RES forecasting | Maximizing the use of RESs and batteries | Reinforcement learning-based NN | DR is ignored | Markov chain | [148] |
| Decentralized approach; energy consumption priority | Minimizing energy imbalance | MAS | Charging/discharging effects are ignored | Predicted | [149] |
| Using STATCOM to enhance PQ | Optimizing energy balance | MAS | Load shedding forfeit cost is ignored; RES and battery running costs are ignored | Autoregressive-moving average technique | [150] |
| Load variations; weather conditions | Optimize voltage regulation and improve system stability | Harmony search algorithm | DR is ignored; emission cost is ignored | Predicted | [151] |
| Battery SOC forfeit cost | Minimizing MG running cost | MAS | DR is ignored | Predicted | [153] |
| Short-term forecast; coordination among agents | Maximizing profit | Backward induction algorithm | Uncertainty in RES generations is ignored | Big data- generation prediction technique | [154] |
| Unpredictably of RESs and load demand; | Optimal MG operation | Game theory | ESS is not considered | Billing mechanism | [155] |
| Pareto optimal approach | Minimizing MG running and emission costs | Improved game theory | DR is ignored; computational complexity is ignored | Predicted | [157] |
| Unpredictably of RESs and load demand | Maximizing the use of RESs and minimizing the load variations | Improved intelligence approach | Charging/ discharging effects are ignored; battery DOD cost is ignored | Markov chain | [158] |
| Major Considerations | Research Objective | Suggested Technique | Limitations | Unpredictability- Handling Technique | Ref. |
|---|---|---|---|---|---|
| Unpredictability of RESs and load demand; forfeiting cost on load termination | MG running costs | Stochastic optimization | DR is ignored; more complex problem | Scenario-based approach | [159] |
| TG operating cost; energy trading cost | Minimizing MG running cost | Stochastic optimization | Computational time is neglected; higher DOD, leading to quick degradation | Monte Carlo approach | [160] |
| Fluctuations in RESs and load demand; battery SOC | Minimizing investment cost; minimizing MG running cost | Stochastic optimization | Emission and battery degradation are ignored | Scenario-based approach | [161] |
| Power imbalance cost; fluctuations in RESs and load demand | Optimal MG operation | RO | DR is ignored; more complex problem | Nondominated sorting GA-trained NN | [162] |
| Worst-case scenario in energy planning; unpredictability of generations and demands | Minimizing TG running cost; minimizing energy trading cost | RO | DR is ignored; emission cost is ignored | Interval prediction theory | [163] |
| Day-ahead unit commitment | Optimal MG operation | RO | Computational time is ignored; higher DOD, leading to quick degradation | Predicted | [165,166] |
| EMS Technique | Advantages | Disadvantages | Improvement |
|---|---|---|---|
| Conventional technique | High precision factor; requires less computational time | Hard to implement for the large system; limited space optimization | Apply advanced mathematical techniques |
| Metaheuristic technique | Easy to implement; Capable of handling complex problems; deals with numerous variables | Relatively lower performance for determining global optimal solution; premature convergence; requires a long computational time | Requires advanced heuristic strategies |
| Artificial intelligence technique | Efficient performance for determining global optimal solution; capable of handling complex problems | Relatively hard to code | New deep-learning methods could improve the EMS |
| Stochastic and robust optimization technique | Capable of handling complex problems | Computational time complexity is higher; complex formulation | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, M.M.; Nagrial, M.; Rizk, J.; Hellany, A. General Aspects, Islanding Detection, and Energy Management in Microgrids: A Review. Sustainability 2021, 13, 9301. https://doi.org/10.3390/su13169301
Islam MM, Nagrial M, Rizk J, Hellany A. General Aspects, Islanding Detection, and Energy Management in Microgrids: A Review. Sustainability. 2021; 13(16):9301. https://doi.org/10.3390/su13169301
Chicago/Turabian StyleIslam, Md Mainul, Mahmood Nagrial, Jamal Rizk, and Ali Hellany. 2021. "General Aspects, Islanding Detection, and Energy Management in Microgrids: A Review" Sustainability 13, no. 16: 9301. https://doi.org/10.3390/su13169301
APA StyleIslam, M. M., Nagrial, M., Rizk, J., & Hellany, A. (2021). General Aspects, Islanding Detection, and Energy Management in Microgrids: A Review. Sustainability, 13(16), 9301. https://doi.org/10.3390/su13169301