1. Introduction
In the competitive electricity market, optimal power flow (OPF) is one of the important tools to optimally dispatch generation with the considered objective function while satisfying system constraints [
1,
2,
3]. The OPF aims to find the best feasible values of control variables providing the best objective value. Generally, the objective function considered by power companies is to minimize generation costs in order to achieve the highest profits of power dispatch. Minimizing fuel cost is a direct way to decrease the generation cost while minimizing transmission line loss is another way to reduce power generation resulting in generation cost reduction. However, with the higher power generation of thermal plants for satisfying present higher load demand, a large amount of emission is emitted that causes pollution in the air [
4]. Hence, three objectives consisting of fuel cost, emission, and transmission line loss are considered as part of the objective function to be minimized in the OPF problems of this study.
The OPF is a nonlinear, nonconvex, large-scale, and static programming problem [
5] which has attracted an effort from many researchers to apply various methods to solve the problem. In the past, some traditional techniques such as quadratic programming [
6], interior point method [
7], and nonlinear programming [
8] were used to solve the OPF problem. However, these algorithms are usually trapped in the local optima, which returns a low-quality solution, and requires a large amount of computational time. To overcome these weaknesses, many other optimization methods have been introduced. One of the methods are metaheuristic algorithms which have recently been the most popular methods adopted to successfully solve several optimization problems in different fields [
9,
10,
11,
12,
13,
14,
15,
16,
17] including the OPF problem. Some of the metaheuristic algorithms, which have been used to solve single-objective OPF problem, are grasshopper optimization (GOA) [
18], Harris hawks optimization (HHO) [
18], salp swarm algorithm (SSA) [
19], glow warm swarm optimization (GSO) [
19], ant colony optimization (ACO) [
20], and grey wolf optimizer (GWO) [
21]. However, due to several necessary objective functions considered to be optimized, solving the single-objective OPF problem is inadequate in the present power systems. So, the OPF problem becomes a multi-objective OPF (MOOPF) problem which is more difficult and complex to be solved.
In the MOOPF problem, more than one independent objective is considered as the objective function; consequently, the number of optimal solutions as a trade-off between each objective is unlimited. These optimal solutions are called Pareto optimal solutions or Pareto fronts [
22]. To solve the MOOPF problem, many methods have been introduced. For example, one of them converted the multi-objective problem into a single-objective problem so that a single-objective optimizer can be used. However, this technique requires weights for each objective resulting in the limitation of the available choices and the need for multiple runs [
19]. Thus, to overcome these drawbacks, many algorithms such as hybrid dragonfly algorithm-particle swarm optimization (DA-PSO) [
23], differential evolution (DE) [
21], modified Gaussian bare-bones multi-objective imperialist competitive algorithm (MGBICA) [
24], modified teaching-learning-based optimization (MTLBO) [
25], and modified shuffled frog leaping algorithm (MSFLA) [
26] have been proposed to solve the MOOPF problem, and the Pareto fronts were successfully generated. Besides, a multidimensional bi-objective optimization algorithm based on the branch-and-bound approach and trisection of hyper-rectangles which cover the feasible region is proposed for non-convex multi-objective optimization [
27]. Moreover, visualization of the multidimensional results in the decision space can be important to gain insight into the Pareto optimal solutions. For example, the multidimensional scaling (MDS) and self-organizing maps (SOM) methods have proved their worth in solving multi-objective optimization (MOO) problems [
28], and the recent application can be found in [
29].
Despite many successes in solving different optimization problems including the MOOPF problem, several new optimization algorithms have still been proposed and qualified as high-performance algorithms such as GWO [
30], whale optimization algorithm (WOA) [
31], SSA [
32], and HHO [
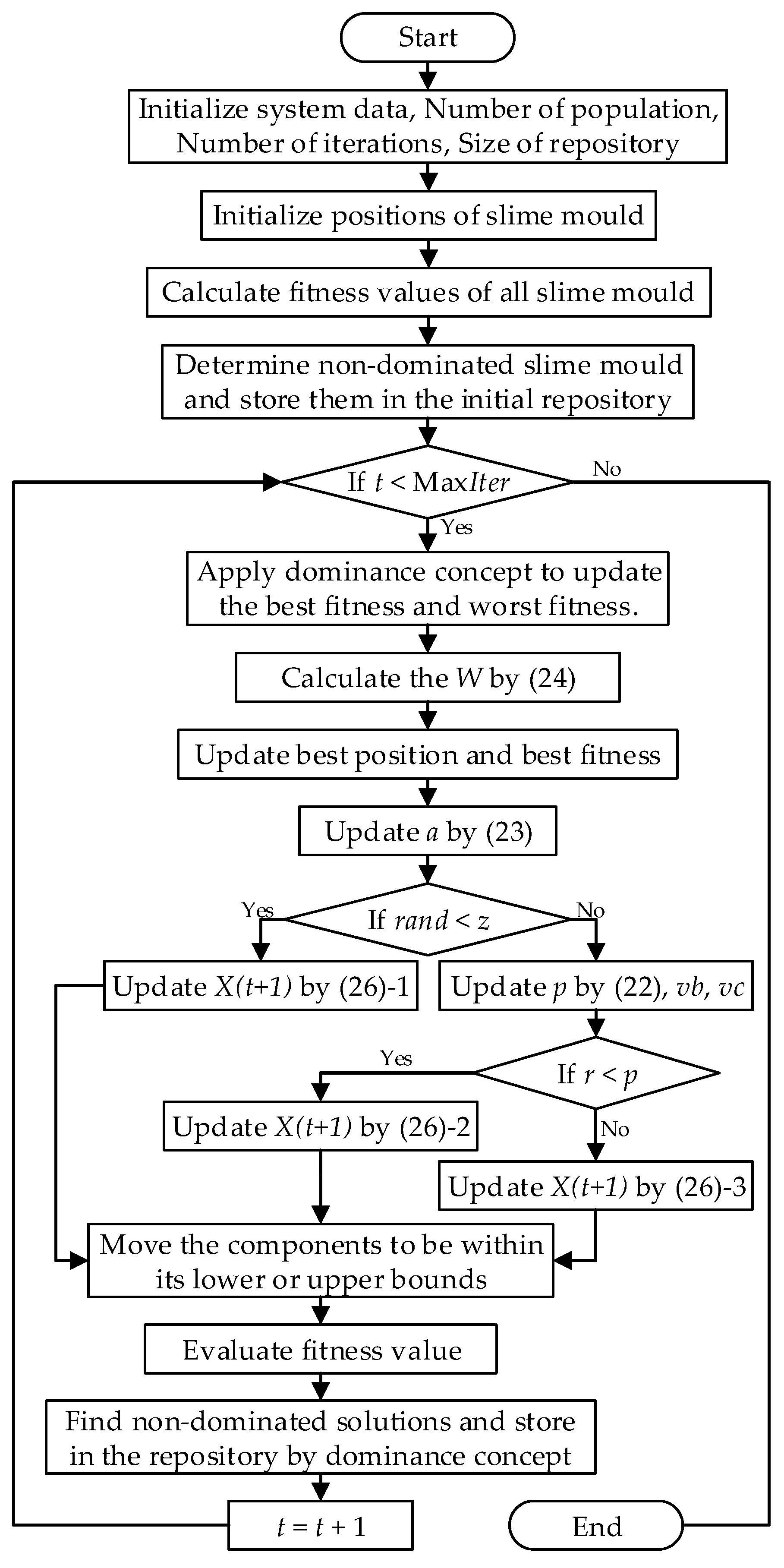
33]. These newly proposed algorithms are expected to provide better solutions for different optimization problems than traditional algorithms. Slime mould algorithm (SMA) is a very recent algorithm proposed by Li, Shimin et al. [
34], and it has received a huge of attractions by many researchers in various fields [
35,
36,
37]. However, SMA has been rarely applied to solve the OPF problem [
38] and never been investigated on solving the MOOPF problem. So that, this work proposes a method to solve the MOOPF problem in a power system based on SMA. A Pareto dominance concept is applied to the SMA, so that the SMA can store the non-dominated Pareto fronts for the MOOPF problems. A crowding mechanism is adopted to deal with the Pareto repository. The performance of the SMA has been evaluated for solving both single- and multi-objective OPF problems where fuel cost, emission, and transmission line loss are considered as part of the objective functions. IEEE 30-, 57-, and 118-bus systems were adopted to investigate the performance of the algorithm, and the simulation results were compared with many other algorithms in the literature.
The main contributions of this work are as follows:
A method to solve the MOOPF problem in the power systems based on SMA is proposed. The Pareto dominance concept is applied to the SMA in order to store non-dominated Pareto fronts, and the crowding mechanism is adopted to deal with the Pareto repository.
The SMA is adopted to solve single- and multi-objective optimal power flow problems in the IEEE 30-, 57-, and 118-bus systems.
The performance of SMA is investigated in terms of fuel cost, emission, and transmission loss improvement, and the results are compared with those of many other algorithms in the literature.
The rest of the paper is divided as follows. Problem formulation of the MOO including objective functions and constraints is presented in
Section 2.
Section 3 introduces the SMA and its mathematical model. In
Section 4, simulation results, comparison results, and discussions are provided. The conclusion of this work is finally given in
Section 5.
2. Problem Formulation
The MOO aims to find an optimal set of decision variables on solving more than one objective functions while satisfying a set of equality and inequality constraints. The obtained solutions from the MOO problem have a trade-off between each considered objective function; thus, the number of the solutions is uncountable. The set of these solutions is traditionally called Pareto optimal solutions or Pareto fronts. The MOO problem can be mathematically modeled as the given equation.
subject to
where
f is a vector of the considered objective function to be optimized,
Nob is the number of objective functions,
g(
x,u) is the equality constraints,
h(
x,
u) is the inequality constraints,
x is a vector of state variables consisting of active power generation at the slack bus, voltage magnitudes at load buses, reactive power generations and apparent powers flowing in lines, and
u is a vector of control variables including active power generations except at slack bus, voltage magnitudes of generators, transformer tap ratios, and shunt compensation capacitor reactive powers.
2.1. Objective Functions
In this work, three objective functions comprising fuel cost, emission, and transmission line loss are considered as the objective functions in the MOOPF problem. Each objective is explained as follows:
2.1.1. Fuel Cost
The total fuel cost of the generated real power of the interconnected units is generally considered as part of the objective functions to be minimized for thermal plants. The total fuel cost can be represented by the quadratic function and formulated as the provided equation.
where
fTC is the total fuel cost function of generators (
$/h),
Ng is the number of generators,
ai,
bi,
ci are fuel cost coefficients of the
ith generating unit, and
Pgi is the active power generation of the
ith generating unit.
2.1.2. Emission
The total emission function is taken into account to be minimized to reduce pollutions released by plants in the atmosphere. The summation of various types of emissions such as
SOx and
NOx are computed to represent the total emission function. The total emission function is calculated by the presented equation.
where
fTE is the total emission function of generators (ton/h), and
are emission coefficients of the
ith generating unit.
2.1.3. Transmission Line Loss
To further reduce generation cost and active power generation, transmission line loss is aimed to be minimized. The line loss function is computed as follows:
where
fTL is the total transmission line loss function (MW),
Nline is the number of transmission lines,
gk is the conductance of the
kth transmission line,
Vi is the voltage magnitude at the
ith bus,
Vj is the voltage magnitude at the
jth bus, and
is the difference of voltage phase angle between buses
i and
j.
2.2. Constraints
A set of equality and inequality constraints is satisfied while optimizing the considered objective functions.
2.2.1. Equality Constraints
The equality constraints of the OPF problem are active and reactive power balance equations formulated as the following equations.
where
Qgi is reactive power generations of the
ith generating unit,
Pdi and
Qdi are active and reactive power demands at the
ith bus, respectively,
Nbus is the number of buses, and
Gij and
Bij are the transfer conductance and transfer susceptance between buses
i and
j, respectively.
2.2.2. Inequality Constraints
The inequality constraints of the OPF problem are set to satisfy system security as follows:
where
Pgimin and
Pgimax are the minimum and maximum active power generations of the
ith generating unit, respectively,
Qgimin and
Qgimax are the minimum and maximum reactive power generations of the
ith generating unit, respectively,
Vgimin and
Vgimax are the minimum and maximum voltage magnitudes of the
ith generating unit, respectively,
Vgi is the voltage magnitude of the
ith generating unit,
Sli is the apparent power flowing in branch
i,
Slimax is the maximum apparent power flowing in branch
i,
VLimin and
VLimax are the minimum and maximum load bus voltage magnitudes at the
ith bus, respectively,
VLi is the load bus voltage magnitude at the
ith bus,
Qcimin and
Qcimax are the minimum and maximum shunt compensation capacitors installed at the
ith bus, respectively,
Qci is the shunt compensation capacitor installed at the
ith bus,
Timin and
Timax are the minimum and maximum transformer tap ratios at the
ith bus, respectively,
Ti is the transformer tap ratio at the
ith bus,
NL is the number of load buses,
Nc is the number of shunt compensation capacitors, and
Nt is the number of transformers.
2.2.3. Constraint Handling
The inequality constraints of the state variables which are uncontrollable are merged into the penalized objective function to ensure that these variables are maintained within their limits. The objective function is then penalized as the following equation [
26].
where
J(
x,
u) is the penalized objective function, and
Kp,
KQ,
KV, and
Ks are the penalty factors for the real power generation limit violation at the slack bus, reactive power generation limit violation, load bus voltage violation, and the line apparent power flow violation, respectively.
,
,
, and
are the limit values of the real power generation at the slack bus, reactive power generation, load bus voltage, and line apparent power flow, respectively, defined as the equations below.
5. Conclusions
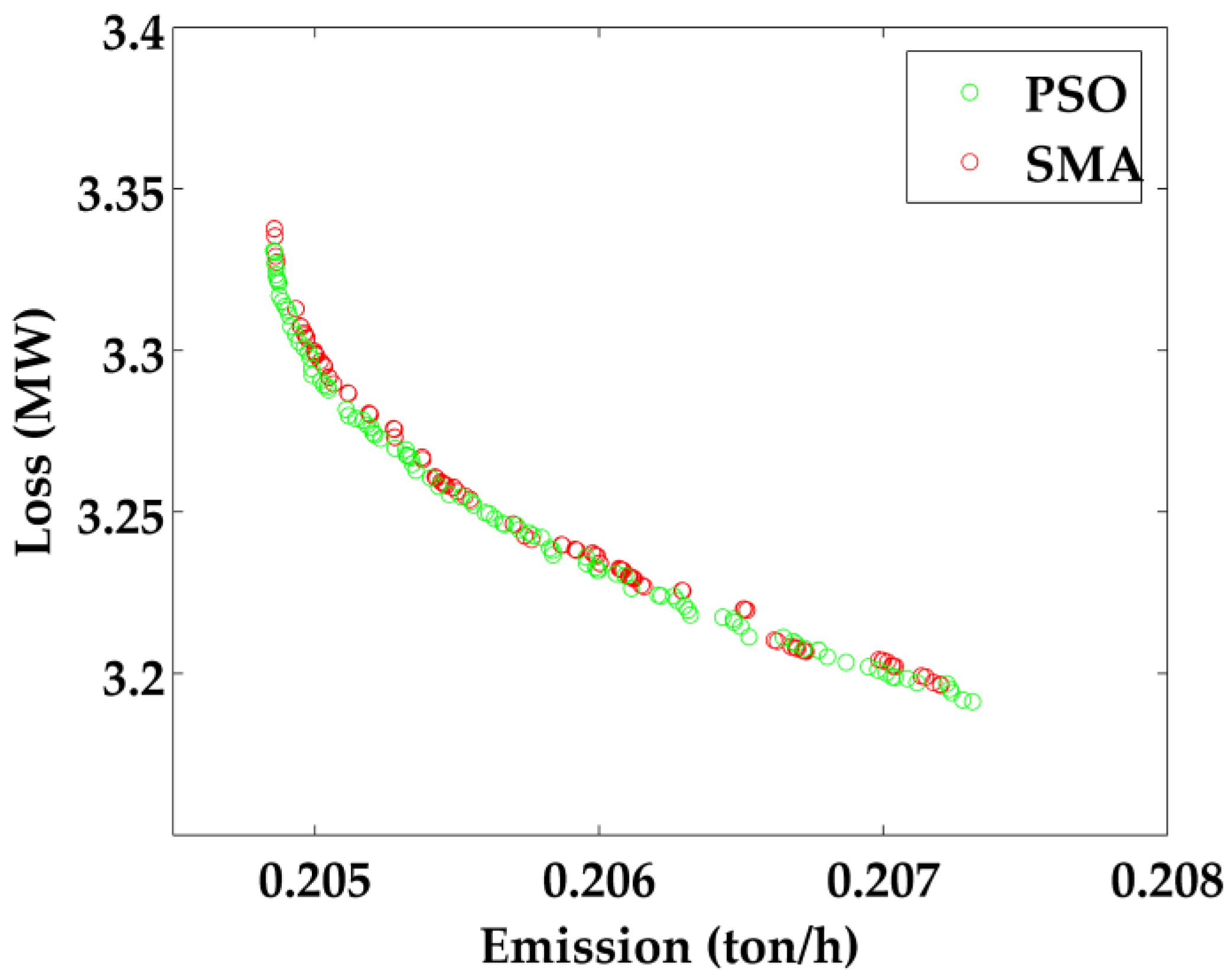
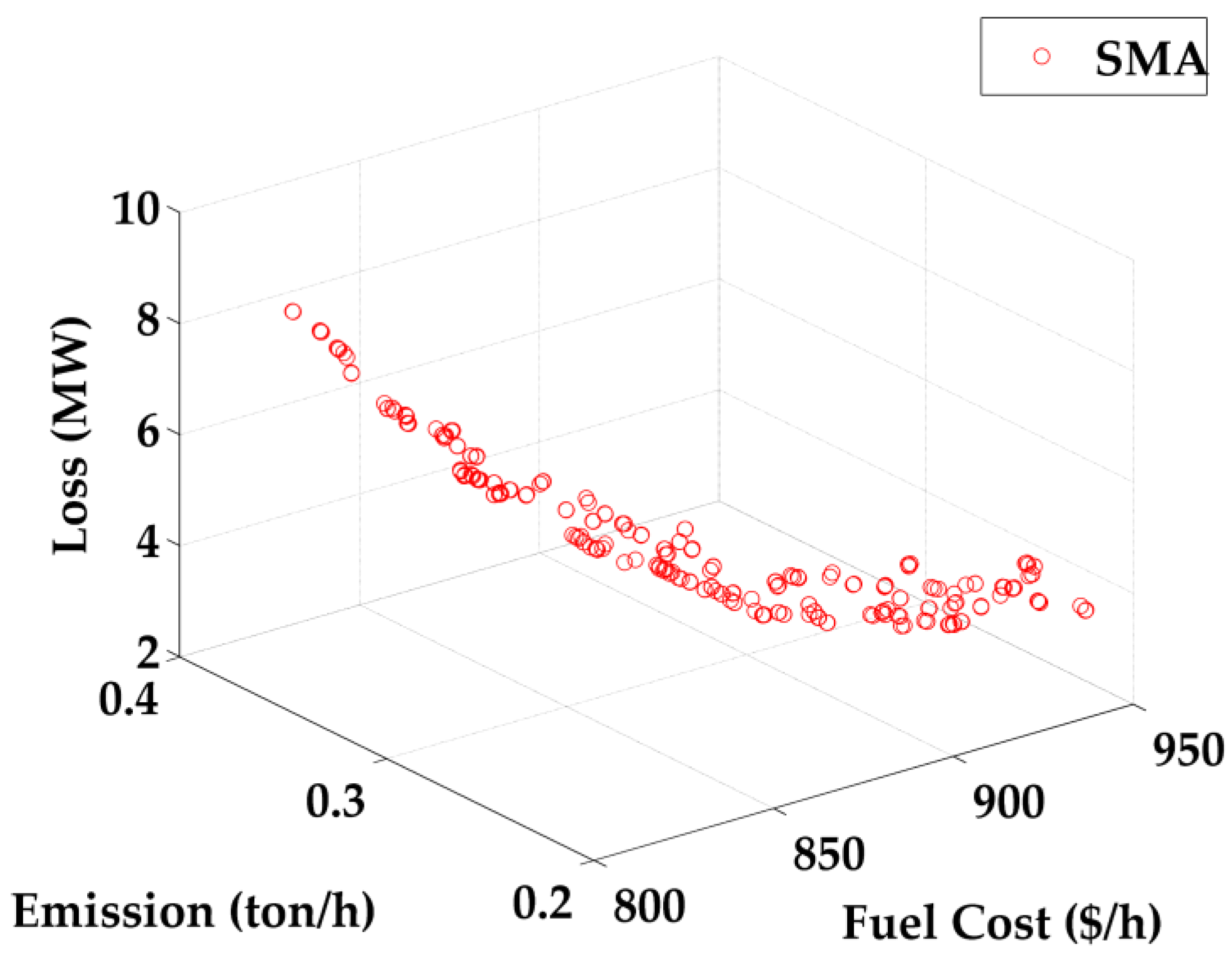
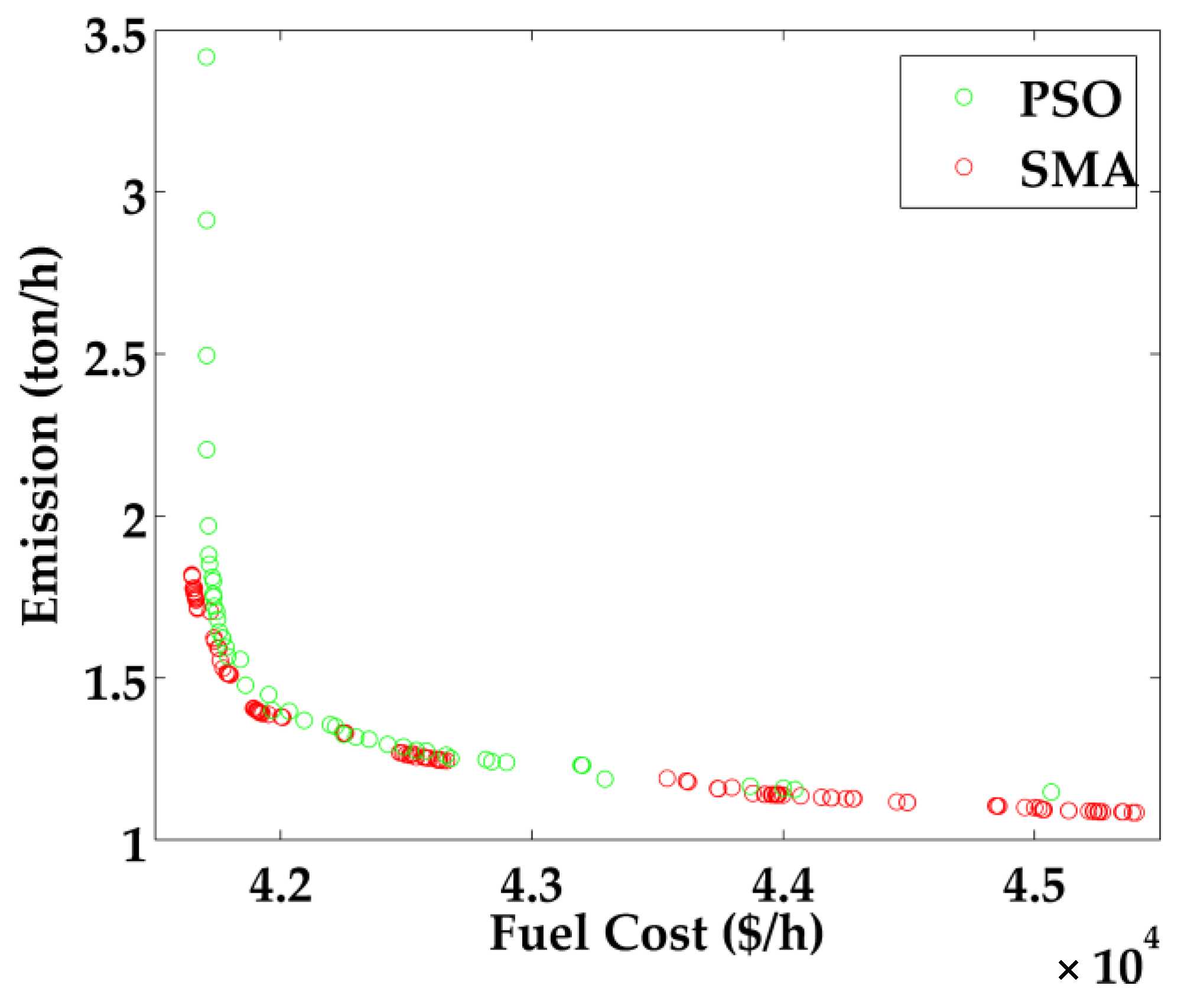
This paper presents a method to solve MOOPF problems based on SMA by considering fuel cost, emission, and transmission line loss as part of the objective functions to be minimized. The SMA is a recently proposed algorithm, which has been applied to successfully solve many optimization problems in several fields. However, the SMA has been rarely investigated on solving the single-objective OPF problem and never been evaluated on solving the MOOPF problem. So, this work has introduced a method to solve the MOOPF problems based on SMA and investigated the performance of the SMA on solving both single-objective and multi-objective OPF problems. The IEEE 30-, 57-, and 118-bus systems were employed to evaluate the performance of the SMA. The simulation results show that the SMA could successfully solve the single-objective OPF problem. The SMA provided slightly better solutions for the IEEE 30-bus system, moderately better solutions for the IEEE 57-bus system, and significantly better solutions for the IEEE 118-bus system in terms of the objective values than many other algorithms in the literature. For the MOOPF problems, the two-dimensional Pareto fronts generated by the SMA are better than those of the well-known high-performance algorithm which is the PSO algorithm. Especially in the IEEE 118-bus system, the SMA could efficiently obtain the Pareto fronts while PSO could not converge to the solutions within the imposed iteration. Moreover, the three-dimensional Pareto fronts could also be efficiently provided by the SMA where the operators should judiciously choose the appropriate solution depending on the objective and situation. Hence, the SMA is verified as a high-performance algorithm for solving both single-objective and multi-objective OPF problems, especially in large systems. In future work, the SMA can be applied to solve the OPF problems in practical systems where the system sizes are generally large, and many-objective OPF problems (more than three objective functions) can be solved based on SMA to further improve power system performance in several terms.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}