Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods



Abstract
1. Introduction
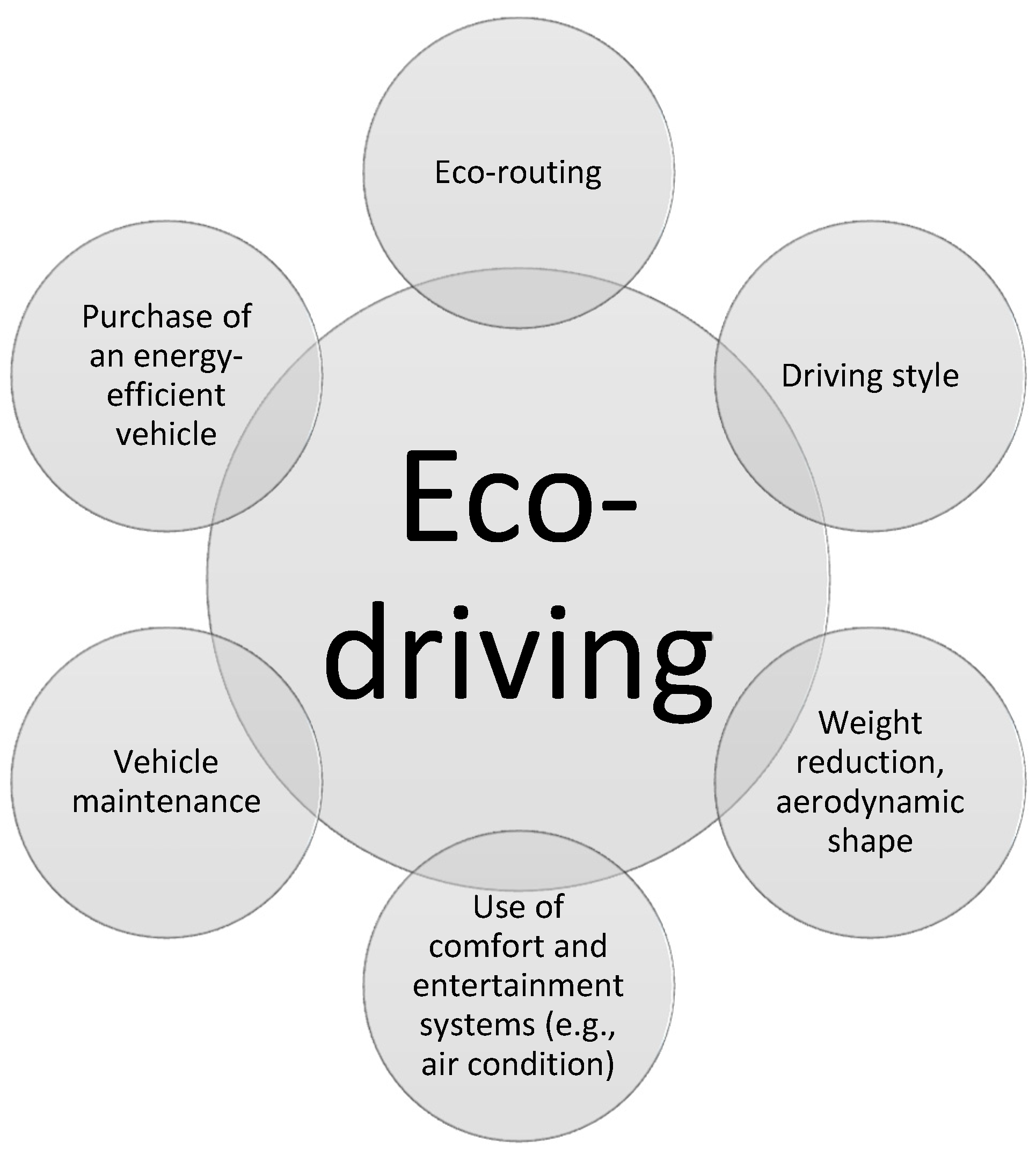
2. Defining Eco-Driving
3. Observing Eco-Driving
4. Linking Eco Driving with Fuel Consumption
4.1. Basic Fuel Consumption Estimation Models
4.1.1. Physics-Based vs. Data-Driven Models
4.1.2. Modeling Scale
4.1.3. Model Transparency
- Engine-based models, in which input variables are metrics related to the engine, such as rotational speed (rounds per minute), engine torque, and power.
- Vehicle-based models with variables such as instantaneous or average speed and acceleration.
- Models based on operating modes, with input variables such as acceleration, constant speed, deceleration and idling.
4.2. Behavioral Fuel Consumption Models
4.3. Eco Driving Effects on Fuel Consumption
5. The Promises and Some Caveats
5.1. Data Collection
5.2. Modeling Efficiency
5.3. Modeling Completeness vs. Usefulness
5.4. Managing Driving Behavior and Eco-Routing
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Commission. Roadmap to a Single European Transport Area-Towards a Competitive and Resource Efficient Transport System; European Commission: Brussels, Belgium, 2011. [Google Scholar]
- Huang, Y.; Ng, E.C.Y.; Zhou, J.L.; Surawski, N.C.; Chan, E.F.C.; Hong, G. Eco-driving technology for sustainable road transport: A review. Renew. Sustain. Energy Rev. 2018, 93, 596–609. [Google Scholar] [CrossRef]
- Xu, Z.; Wei, T.; Easa, S.; Zhao, X.; Qu, X. Modeling Relationship between Truck Fuel Consumption and Driving Behavior Using Data from Internet of Vehicles. Comput. Civ. Infrastruct. Eng. 2018, 33, 209–219. [Google Scholar] [CrossRef]
- European Union. EU Energy in Figures, Statistical Pocketbook 2014; European Commission: Brussels, Belgium, 2014. [Google Scholar]
- Stillwater, T.; Kurani, K.S.; Mokhtarian, P.L. The combined effects of driver attitudes and in-vehicle feedback on fuel economy. Transp. Res. Part D Transp. Environ. 2017, 52, 277–288. [Google Scholar] [CrossRef]
- Zeng, W.; Miwa, T.; Morikawa, T. Prediction of vehicle CO2 emission and its application to eco-routing navigation. Transp. Res. Part C Emerg. Technol. 2016, 68, 194–214. [Google Scholar] [CrossRef]
- Turkensteen, M. The accuracy of carbon emission and fuel consumption computations in green vehicle routing. Eur. J. Oper. Res. 2017, 262, 647–659. [Google Scholar] [CrossRef]
- Zhou, M.; Jin, H.; Wang, W. A review of vehicle fuel consumption models to evaluate eco-driving and eco-routing. Transp. Res. Part D Transp. Environ. 2016, 49, 203–218. [Google Scholar] [CrossRef]
- Magana, V.C.; Munoz-Organero, M. Artemisa: A personal driving assistant for fuel saving. IEEE Trans. Mob. Comput. 2016, 15, 2437–2451. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Liu, H.; Rodgers, M.O.; Guensler, R.L. Eco-driving for transit: An effective strategy to conserve fuel and emissions. Appl. Energy 2017, 194, 784–797. [Google Scholar] [CrossRef]
- Andrieu, C.; Pierre, G.S. Using statistical models to characterize eco-driving style with an aggregated indicator. IEEE Intell. Veh. Symp. Proc. 2012, 63–68. [Google Scholar] [CrossRef]
- Hsu, C.Y.; Lim, S.S.; Yang, C.S. Data mining for enhanced driving effectiveness: An eco-driving behaviour analysis model for better driving decisions. Int. J. Prod. Res. 2017, 55, 7096–7109. [Google Scholar] [CrossRef]
- Zheng, F.; Li, J.; van Zuylen, H.; Lu, C. Influence of driver characteristics on emissions and fuel consumption. Transp. Res. Procedia 2017, 27, 624–631. [Google Scholar] [CrossRef]
- Ayyildiz, K.; Cavallaro, F.; Nocera, S.; Willenbrock, R. Reducing fuel consumption and carbon emissions through eco-drive training. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 96–110. [Google Scholar] [CrossRef]
- Husnjak, S.; Forenbacher, I.; Bucak, T. Evaluation of eco-driving using smart mobile devices. PROMET Traffic Transp. 2015, 27, 335–344. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Toh, C.K.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Drivingstyles: A mobile platform for driving styles and fuel consumption characterization. J. Commun. Netw. 2017, 19, 162–168. [Google Scholar] [CrossRef]
- Sivak, M.; Schoettle, B. Eco-driving: Strategic, tactical, and operational decisions of the driver that influence vehicle fuel economy. Transp. Policy 2012, 22, 96–99. [Google Scholar] [CrossRef]
- United Kingdom Deptartment of Transport. Advising Fuel Efficient Driving Techniques for Your Fleet; Energy Savings Trust: London, UK, 2016.
- Mantouka, E.G.; Barmpounakis, E.; Vlahogianni, E.; Golias, J. Smartphone sensing for understanding driving behavior: Current practice and challenges. Int. J. Transp. Sci. Technol. 2020. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, J.; Tian, Y. The impact of socio-demographic characteristics and driving behaviors on fuel efficiency. Transp. Res. Part D 2020, 88, 102565. [Google Scholar] [CrossRef]
- Hermawan, G.; Husni, E. Acquisition, modeling, and evaluating method of driving behavior based on OBD-II: A literature survey. IOP Conf. Ser. Mater. Sci. Eng. 2020, 879. [Google Scholar] [CrossRef]
- Gilman, E.; Keskinarkaus, A.; Tamminen, S.; Pirttikangas, S.; Röning, J.; Riekki, J. Personalised assistance for fuel-efficient driving. Transp. Res. Part C Emerg. Technol. 2015, 58, 681–705. [Google Scholar] [CrossRef]
- Adamidis, F.K.; Mantouka, E.G.; Vlahogianni, E.I. Effects of controlling aggressive driving behavior on network-wide traffic flow and emissions. Int. J. Transp. Sci. Technol. 2020, 9, 263–276. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Barmpounakis, E.N. Driving analytics using smartphones: Algorithms, comparisons and challenges. Transp. Res. Part C Emerg. Technol. 2017, 79, 196–206. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Driving styles: A smartphone application to assess driver behavior. Proc. Int. Symp. Comput. Commun. 2013, 535–540. [Google Scholar] [CrossRef]
- Mantouka, E.G.; Barmpounakis, E.N.; Vlahogianni, E.I. Identifying driving safety profiles from smartphone data using unsupervised learning. Saf. Sci. 2019, 119, 84–90. [Google Scholar] [CrossRef]
- Tselentis, D.I.; Yannis, G.; Vlahogianni, E.I. Innovative motor insurance schemes: A review of current practices and emerging challenges. Accid. Anal. Prev. 2017, 98, 139–148. [Google Scholar] [CrossRef] [PubMed]
- CGI. Modeling the Relation between Driving Behavior and Fuel Consumption; CGI Group Inc.: Montreal, QC, Canada, 2014. [Google Scholar]
- Lucidi, F.; Giannini, A.M.; Sgalla, R.; Mallia, L.; Devoto, A.; Reichmann, S. Young novice driver subtypes: Relationship to driving violations, errors and lapses. Accid. Anal. Prev. 2010, 42, 1689–1696. [Google Scholar] [CrossRef] [PubMed]
- Martinussen, L.M.; Møller, M.; Prato, C.G. Assessing the relationship between the driver behavior questionnaire and the driver skill inventory: Revealing sub-groups of drivers. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 82–91. [Google Scholar] [CrossRef]
- Özkan, T.; Lajunen, T.; el Chliaoutakis, J.; Parker, D.; Summala, H. Cross-cultural differences in driving behaviours: A comparison of six countries. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 227–242. [Google Scholar] [CrossRef]
- Mintsis, E.; Vlahogianni, E.I.; Mitsakis, E. Dynamic eco-driving near signalized intersections: Systematic review and future research directions. J. Transp. Eng. Part A Syst. 2020, 146, 04020018. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, L.; Gonder, J.; Young, S.; Walkowicz, K. Data-driven fuel consumption estimation: A multivariate adaptive regression spline approach. Transp. Res. Part C Emerg. Technol. 2017, 83, 134–145. [Google Scholar] [CrossRef]
- LaClair, T. Large Scale Duty Cycle (LSDC) Project: Tractive Energy Analysis Methodology and Results from Long-Haul Truck Drive Cycle Evaluations; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2011.
- Jiménez-Palacios, L.J. Understanding and Quantifying Motor Vehicle Emissions with Vehicle Specific Power and TILDAS Remote Sensing; Massachusetts Institute of Technology (MIT): Cambridge, MA, USA, 1999. [Google Scholar]
- An, F.; Barth, M.; Norbeck, J.; Ross, M. Development of comprehensive modal emissions model: Operating under hot-stabilized conditions. Transp. Res. Rec. J. Transp. Res. Board 1997, 1587, 52–62. [Google Scholar] [CrossRef]
- Nesamani, K.S.; Saphores, J.D.; McNally, M.G.; Jayakrishnan, R. Estimating impacts of emission specific characteristics on vehicle operation for quantifying air pollutant emissions and energy use. J. Traffic Transp. Eng. 2017, 4, 215–229. [Google Scholar] [CrossRef]
- Rakha, H.; Ahn, K.; Trani, A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions. Transp. Res. Part D Transp. Environ. 2004, 9, 49–74. [Google Scholar] [CrossRef]
- Walnum, H.J.; Simonsen, M. Does driving behavior matter? An analysis of fuel consumption data from heavy-duty trucks. Transp. Res. Part D 2015, 36, 107–120. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, X.; Zhang, Y.; Chen, C.; Rong, J. Modeling of individual vehicle safety and fuel consumption under comprehensive external conditions. Transp. Res. Part D Transp. Environ. 2020, 79. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, X.; Liu, C.; Rong, J.; Zhang, Y.; Dong, Z.; Su, Y. Vehicle fuel consumption prediction method based on driving behavior data collected from smartphones. J. Adv. Transp. 2020, 2020. [Google Scholar] [CrossRef]
- Wickramanayake, S.; Bandara, D.H.M.N. Fuel consumption prediction of fleet vehicles using Machine Learning: A comparative study. In Proceedings of the 2nd International Moratuwa Engineering Research Conference, MERCon 2016, Moratuwa, Sri Lanka, 5–6 April 2016; pp. 90–95. [Google Scholar] [CrossRef]
- Ping, P.; Qin, W.; Xu, Y.; Miyajima, C.; Takeda, K. Impact of driver behavior on fuel consumption: Classification, evaluation and prediction using machine learning. IEEE Access 2019, 7, 78515–78532. [Google Scholar] [CrossRef]
- Wallin, G.Z. A Supervised Learning Approach to Estimate the Drivers Impact on Fuel Consumption a Heavy-Duty Vehicle Case Study; KTH Royal Institute of Technology: Stockholm, Sweden, 2016. [Google Scholar]
- Reddy, N.R. Driving Behaviour Classification: An Eco-driving Approach. Master’s Thesis, EEMCS: Electrical Engineering, Mathematics and Computer Science, Delft, The Netherlands, 2019. [Google Scholar]
- Hiraoka, T.; Matsumoto, S.; Yamabe, S.; Terakado, Y. Quantitative Evaluation of Eco-Driving on Fuel Consumption Based on Driving Simulator Experiments. 2009. Available online: https://www.researchgate.net/publication/234054282 (accessed on 25 September 2020).
- Zhao, F.; Pereira, F.C.; Ball, R.; Kim, Y.; Han, Y.; Zegras, C.; Ben-Akiva, M. Exploratory analysis of a smartphone-based travel survey in Singapore. Transp. Res. Rec. 2015, 2494, 45–56. [Google Scholar] [CrossRef]
- Sanguinetti, A.; Kurani, K.; Davies, J. The many reasons your mileage may vary: Toward a unifying typology of eco-driving behaviors. Transp. Res. Part D Transp. Environ. 2017, 52, 73–84. [Google Scholar] [CrossRef]
- Alam, M.S.; McNabola, A. A critical review and assessment of Eco-Driving policy & technology: Benefits & limitations. Transp. Policy 2014, 35, 42–49. [Google Scholar] [CrossRef]
- Nasir, M.K.; Noor, R.M.; Kalam, M.A.; Masum, B.M. Reduction of fuel consumption and exhaust pollutant using intelligent transport systems. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef]
- US Deptartment of Energy. Idling Reduction for Personal Vehicles; US Deptartment of Energy: Washington, DC, USA, 2015.
- Parr, T.; Wilson, J.D.; Hamrick, J. Nonparametric feature impact and importance. arXiv 2020, arXiv:2006.04750. [Google Scholar]
- Molnar, C. Interpretable Machine Learning. 2019. Available online: https://christophm.github.io/interpretable-ml-book/ (accessed on 30 November 2020).
- Liu, H.; Taniguchi, T.; Tanaka, Y.; Takenaka, K.; Bando, T. Visualization of driving behavior based on hidden feature extraction by using deep learning. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2477–2489. [Google Scholar] [CrossRef]
- Dong, W.; Li, J.; Yao, R.; Li, C.; Yuan, T.; Wang, L. Characterizing driving styles with deep learning. arXiv 2016, arXiv:1607.03611. [Google Scholar]
- Geron, A. Hands-on Machine Learning with Scikit-Learn, Keras and Tensorflow; O’Reilly Media, Inc.: Newton, MA, USA, 2017. [Google Scholar]
- Astarita, V.; Festa, D.C.; Giofrè, P.; Guido, G.; Mongelli, D.W.E. Co-operative ITS: ESD a smartphone based system for sustainability and transportation safety. Procedia Comput. Sci. 2016, 83, 449–456. [Google Scholar] [CrossRef]
- DVlachogiannis, M.; Vlahogianni, E.I.; Golias, J. A reinforcement learning model for personalized driving policies identification. Int. J. Transp. Sci. Technol. 2020. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Authors and Year | Ref. | Modeling Methodologies | Naturalistic Driving Data | Synthetic Data-Simulation | Speed | Acceleration | Constant Speed Duration | Gear | Braking | Engine Operations | Air-Condition | Road Inclination | Road Geometry (Other) | Traffic Conditions | Weather Conditions | Distance travelled | Weight | Idling | Number of Stops | Routing | Vehicle Mechanical Characteristics | Monitoring of Driving Behavior |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Huang et al. (2018) | [2] | N/A | √ | √ | √ | |||||||||||||||||
| Z. Xu et al. (2018) | [3] | Neural Networks, Linear Regression | √ | √ | √ | √ | √ | √ | √ | |||||||||||||
| Zeng et al. (2016) | [6] | N/A | √ | |||||||||||||||||||
| Zhou et al. (2016) | [8] | N/A | √ | √ | √ | √ | √ | √ | √ | √ | ||||||||||||
| Meseguer et al. (2017) | [16] | N/A | √ | |||||||||||||||||||
| Gilman et al. (2015) | [22] | Linear Regression, Neural Networks, Decision Trees | √ | √ | √ | √ | √ | √ | √ | |||||||||||||
| Chen et al. (2017) | [33] | Linear Regression | √ | √ | √ | √ | √ | |||||||||||||||
| Walnum & Simonsen (2015) | [39] | Linear Regression | √ | √ | √ | √ | √ | √ | √ | √ | √ | |||||||||||
| Yao, Zhao, Zhang, et al. (2020) | [40] | Linear Regression | √ | √ | √ | √ | √ | √ | √ | |||||||||||||
| Yao, Zhao, Liu, et al. (2020) | [41] | Neural Networks, Random Forests, Support Vector Regression | √ | √ | √ | √ | √ | |||||||||||||||
| Wickramanayake & Bandara (2016) | [42] | Neural Networks, Random Forests, Gradient Boosting | √ | √ | √ | √ | √ | |||||||||||||||
| Ping et al. (2019) | [43] | LSTM, K-means clustering | √ | √ | √ | √ | ||||||||||||||||
| Wallin (2016) | [44] | Linear Regression | √ | √ | √ | √ | ||||||||||||||||
| Reddy (2019) | [45] | N/A | √ | √ | √ | |||||||||||||||||
| Hiraoka et al. (2009) | [46] | N/A | √ | √ | √ | |||||||||||||||||
| Zhao et al. (2015) | [47] | N/A | √ | √ | √ | |||||||||||||||||
| Sanguinetti et al. (2017) | [48] | N/A | √ | √ | √ | √ | √ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226. https://doi.org/10.3390/su13010226
Fafoutellis P, Mantouka EG, Vlahogianni EI. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability. 2021; 13(1):226. https://doi.org/10.3390/su13010226
Chicago/Turabian StyleFafoutellis, Panagiotis, Eleni G. Mantouka, and Eleni I. Vlahogianni. 2021. "Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods" Sustainability 13, no. 1: 226. https://doi.org/10.3390/su13010226
APA StyleFafoutellis, P., Mantouka, E. G., & Vlahogianni, E. I. (2021). Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability, 13(1), 226. https://doi.org/10.3390/su13010226