On the Selection of Charging Facility Locations for EV-Based Ride-Hailing Services: A Computational Case Study

 ,
,  ,
,
Abstract
1. Introduction
Our Contribution
2. Literature Review
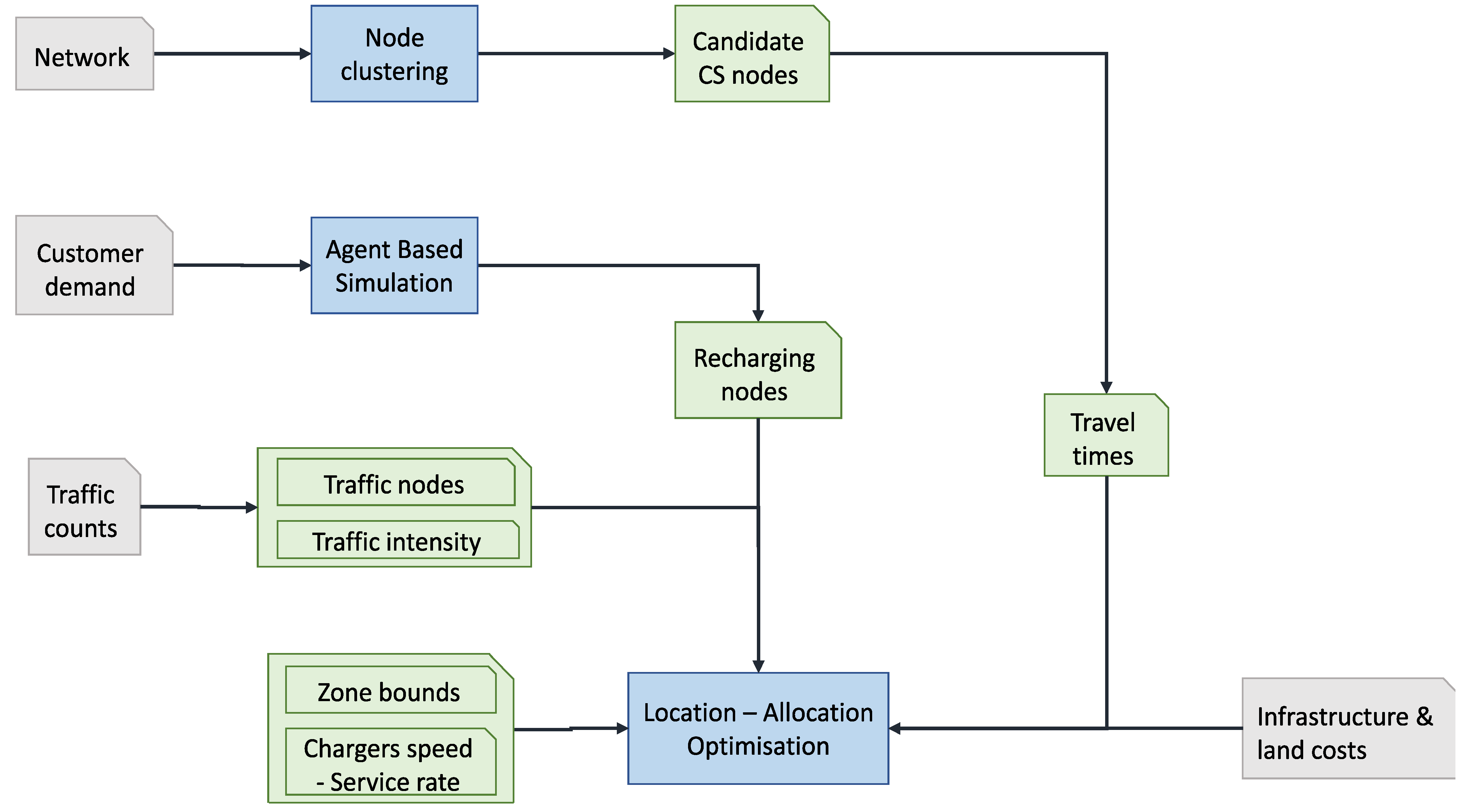
3. Methodology
3.1. Agent Based Simulation
3.2. Charging Demand
3.3. Location-Allocation Problem
3.4. NP-Hardness
3.5. Linearisation
3.6. Genetic Algorithm
| Algorithm 1: Genetic Algorithm (GA) |
 |
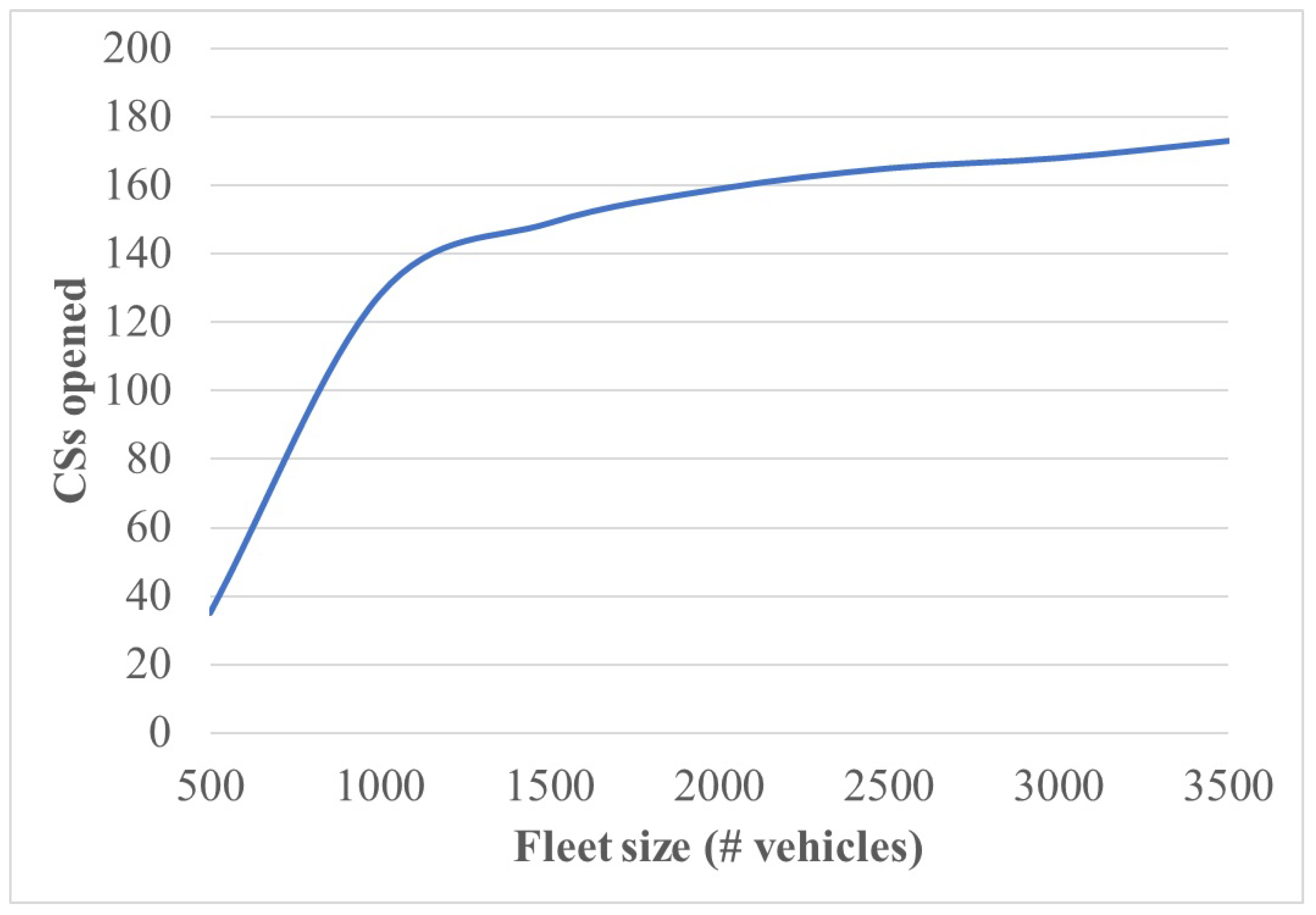
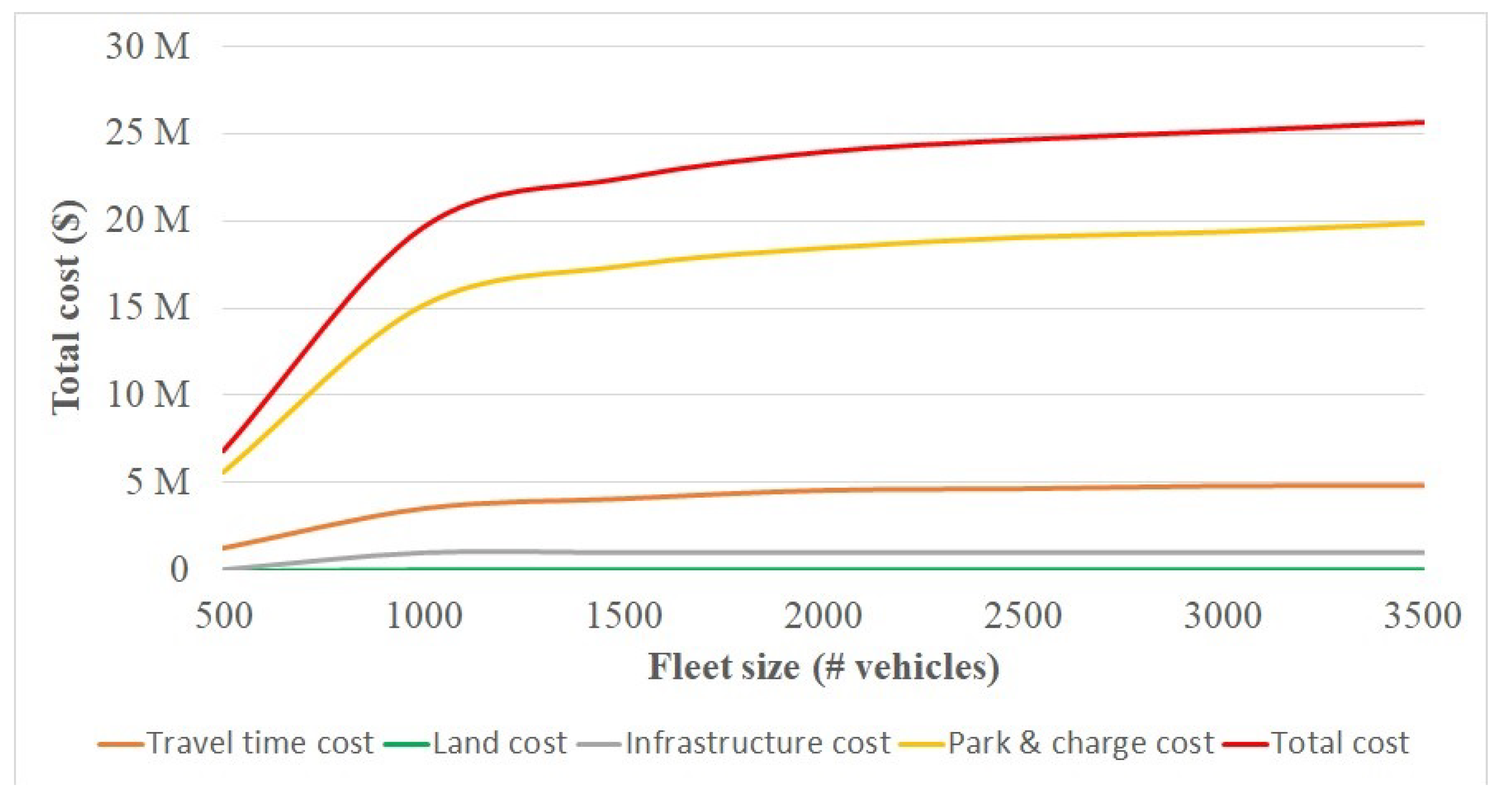
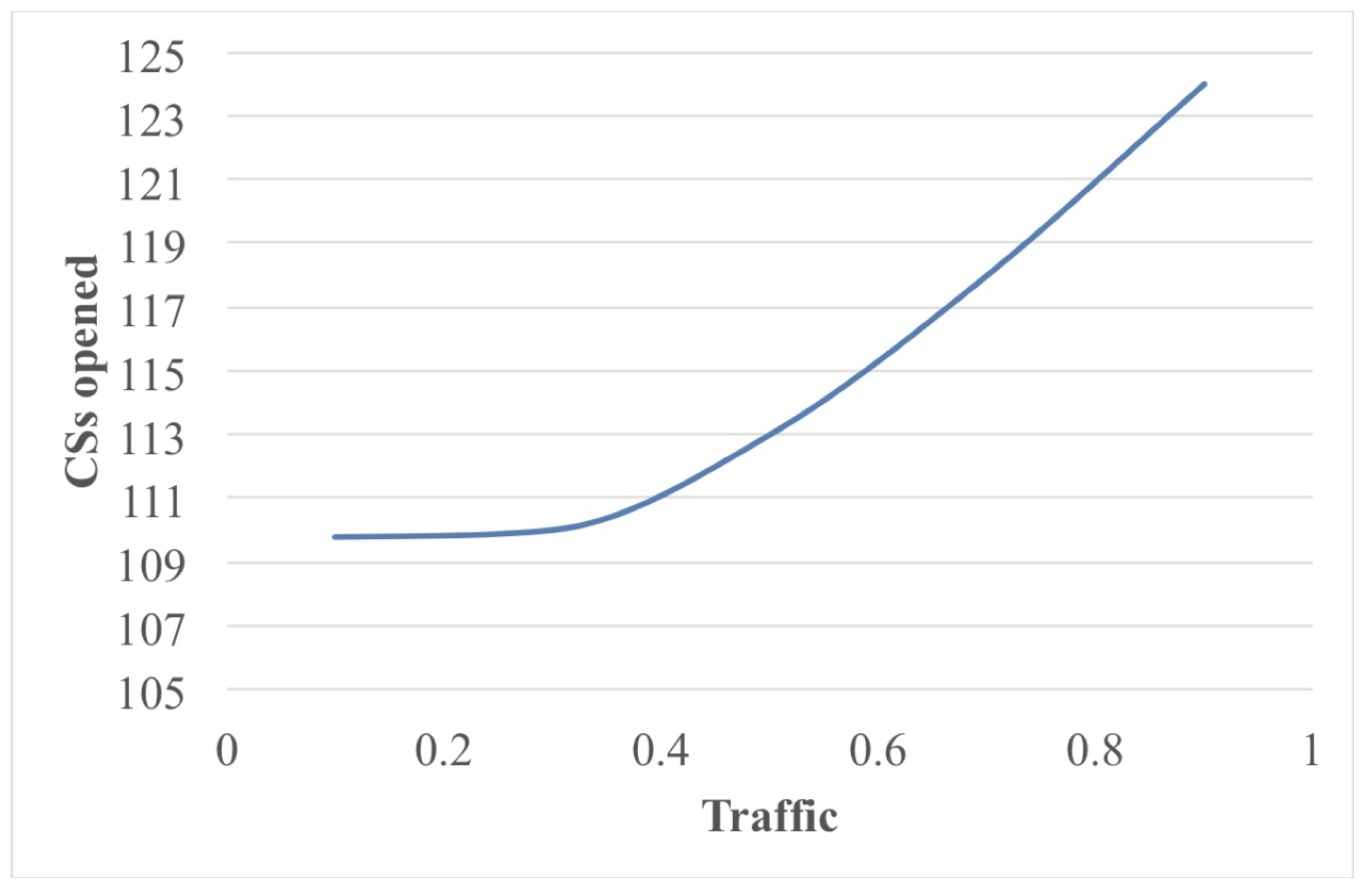
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hesketh, R.; Jones, L.; Hinrichs-Krapels, S.; Kirk, A.; Johnson, S. Air Quality Improvement Initiatives in Other Cities. 2017. Available online: https://www.kcl.ac.uk/sspp/policy-institute/publications/air-quality-improvement-initiatives-in-other-cities.pdf (accessed on 18 November 2020).
- Hellmann, M. Finland’s Capital Plans on Making Private-Car Ownership Obsolete in 10 Years. 2014. Available online: http://time.com/2974984/finland-helsinki-private-car-obsolete-environment-climate-change-transportation/ (accessed on 18 November 2020).
- Uherek, E.; Halenka, T.; Borken-Kleefeld, J.; Balkanski, Y.; Berntsen, T.; Borrego, C.; Gauss, M.; Hoor, P.; Juda-Rezler, K.; Lelieveld, J. Transport impacts on atmosphere and climate: Land transport. Atmos. Environ. 2010, 44, 4772–4816. [Google Scholar] [CrossRef]
- Van Mierlo, J.; Maggetto, G.; Lataire, P. Which energy source for road transport in the future? A comparison of battery, hybrid and fuel cell vehicles. Energy Convers. Manag. 2006, 47, 2748–2760. [Google Scholar] [CrossRef]
- Haji Akhoundzadeh, M.; Raahemifar, K.; Panchal, S.; Samadani, E.; Haghi, E.; Fraser, R.; Fowler, M. A conceptualized hydrail powertrain: A case study of the Union Pearson Express route. World Electr. Veh. J. 2019, 10, 32. [Google Scholar] [CrossRef]
- Tran, M.K.; Mevawala, A.; Panchal, S.; Raahemifar, K.; Fowler, M.; Fraser, R. Effect of integrating the hysteresis component to the equivalent circuit model of Lithium-ion battery for dynamic and non-dynamic applications. J. Energy Storage 2020, 32, 101785. [Google Scholar] [CrossRef]
- Kouchachvili, L.; Yaïci, W.; Entchev, E. Hybrid battery/supercapacitor energy storage system for the electric vehicles. J. Power Sources 2018, 374, 237–248. [Google Scholar] [CrossRef]
- Kang, B.; Ceder, G. Battery materials for ultrafast charging and discharging. Nature 2009, 458, 190. [Google Scholar] [CrossRef]
- London Assembly, Electric Vehicles Environment Committee, L.A. Electric Vehicles in London. 2018. Available online: https://www.london.gov.uk/about-us/london-assembly/london-assembly-publications/electric-vehicles-london-0 (accessed on 18 November 2020).
- Mathieu, L. Roll-Out of Public EV Charging Infrastructure in the EU. Transport & Environment, 7 September 2018. [Google Scholar]
- Takahashi, I. How Many Miles Do Uber and Lyft Drivers Put on Their Cars? 2018. Available online: https://ride.guru/lounge/p/how-many-miles-do-uber-and-lyft-drivers-put-on-their-cars (accessed on 18 November 2020).
- Jung, J.; Chow, J.Y.; Jayakrishnan, R.; Park, J.Y. Stochastic dynamic itinerary interception refueling location problem with queue delay for electric taxi charging stations. Transp. Res. Part Emerg. Technol. 2014, 40, 123–142. [Google Scholar] [CrossRef]
- Hodgson, C. Uber Announces $2bn Expansion of Freight Unit in Chicago. 2019. Available online: https://www.ft.com/content/6fa14cbc-d034-11e9-b018-ca4456540ea6 (accessed on 18 November 2020).
- Emanuel, R. Roadmap for the Future of Transportation and Mobility in Chicago: Chicago’s New Transportation and Mobility Task Force. 2019. Available online: https://www.chicago.gov/content/dam/city/depts/mayor/PDFs/21755_37_AF_MobilityReport.pdf (accessed on 18 November 2020).
- Ruppenthal, A. Study: Chicago Could See 80,000 Electric Cars by 2030. 2018. Available online: https://news.wttw.com/2018/02/22/study-chicago-could-see-80000-electric-cars-2030 (accessed on 18 November 2020).
- Chargehub. Charge Your EV in Chicago. 2019. Available online: https://chargehub.com/en/countries/united-states/illinois/chicago.html?city_id=981 (accessed on 18 November 2020).
- Uber UK. Uber’s Clean Air Plan to Help London Go Electric. 2018. Available online: https://www.uber.com/en-GB/newsroom/uber-helps-london-go-electric/ (accessed on 18 November 2020).
- Lekach, S. New Charging Network Encourages Uber and Lyft Drivers to Go Electric. 2018. Available online: https://mashable.com/2018/04/12/evgo-maven-electric-car-dedicated-charging-network/ (accessed on 18 November 2020).
- Boeing, G. OSMnx: New methods for acquiring, constructing, analyzing, and visualizing complex street networks. Comput. Environ. Urban Syst. 2017, 65, 126–139. [Google Scholar] [CrossRef]
- Asamer, J.; Reinthaler, M.; Ruthmair, M.; Straub, M.; Puchinger, J. Optimizing charging station locations for urban taxi providers. Transp. Res. Part Policy Pract. 2016, 85, 233–246. [Google Scholar] [CrossRef]
- Han, D.; Ahn, Y.; Park, S.; Yeo, H. Trajectory-interception based method for electric vehicle taxi charging station problem with real taxi data. Int. J. Sustain. Transp. 2016, 10, 671–682. [Google Scholar] [CrossRef]
- Sellmair, R.; Hamacher, T. Optimization of charging infrastructure for electric taxis. Transp. Res. Rec. 2014, 2416, 82–91. [Google Scholar] [CrossRef]
- Tu, W.; Li, Q.; Fang, Z.; Shaw, S.l.; Zhou, B.; Chang, X. Optimizing the locations of electric taxi charging stations: A spatial–temporal demand coverage approach. Transp. Res. Part Emerg. Technol. 2016, 65, 172–189. [Google Scholar] [CrossRef]
- Pan, A.; Zhao, T.; Yu, H.; Zhang, Y. Deploying Public Charging Stations for Electric Taxis: A Charging Demand Simulation Embedded Approach. IEEE Access 2019, 7, 17412–17424. [Google Scholar] [CrossRef]
- Gan, X.; Zhang, H.; Hang, G.; Qin, Z.; Jin, H. Fast-Charging Station Deployment Considering Elastic Demand. IEEE Trans. Transp. Electrif. 2020, 6, 158–169. [Google Scholar] [CrossRef]
- Xie, R.; Wei, W.; Khodayar, M.E.; Wang, J.; Mei, S. Planning fully renewable powered charging stations on highways: A data-driven robust optimization approach. IEEE Trans. Transp. Electrif. 2018, 4, 817–830. [Google Scholar] [CrossRef]
- Yang, J.; Dong, J.; Hu, L. A data-driven optimization-based approach for siting and sizing of electric taxi charging stations. Transp. Res. Part Emerg. Technol. 2017, 77, 462–477. [Google Scholar] [CrossRef]
- Gacias, B.; Meunier, F. Design and operation for an electric taxi fleet. Or Spectr. 2015, 37, 171–194. [Google Scholar] [CrossRef]
- Marianov, V.; Serra, D. Probabilistic, maximal covering location—allocation models forcongested systems. J. Reg. Sci. 1998, 38, 401–424. [Google Scholar] [CrossRef]
- Marianov, V.; Serra, D. Location–allocation of multiple-server service centers with constrained queues or waiting times. Ann. Oper. Res. 2002, 111, 35–50. [Google Scholar] [CrossRef]
- Cai, H.; Jia, X.; Chiu, A.S.; Hu, X.; Xu, M. Siting public electric vehicle charging stations in Beijing using big-data informed travel patterns of the taxi fleet. Transp. Res. Part Transp. Environ. 2014, 33, 39–46. [Google Scholar] [CrossRef]
- Statista Inc. Electric Vehicle Registrations as a Share of Total in Selected Countries Worldwide in 2018. 2019. Available online: https://www.statista.com/statistics/267162/world-plug-in-hybrid-vehicle-sales-by-region/ (accessed on 18 November 2020).
- Karamanis, R.; Anastasiadis, E.; Angeloudis, P.; Stettler, M. Assignment and pricing of shared rides in ride-sourcing using combinatorial double auctions. IEEE Trans. Intell. Transp. Syst. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Berman, O.; Drezner, Z. The multiple server location problem. J. Oper. Res. Soc. 2007, 58, 91–99. [Google Scholar] [CrossRef]
- Sayarshad, H.R.; Chow, J.Y. Non-myopic relocation of idle mobility-on-demand vehicles as a dynamic location-allocation-queueing problem. Transp. Res. Part Logist. Transp. Rev. 2017, 106, 60–77. [Google Scholar] [CrossRef]
- Kariv, O.; Hakimi, S.L. An algorithmic approach to network location problems. I: The p-centers. SIAM J. Appl. Math. 1979, 37, 513–538. [Google Scholar] [CrossRef]
- Williams, H.P. Model Building in Mathematical Programming; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chicago Data Portal. Chicago Open Data Web-Portal. 2019. Available online: https://data.cityofchicago.org (accessed on 18 November 2020).
- Fortin, F.A.; De Rainville, F.M.; Gardner, M.A.; Parizeau, M.; Gagné, C. DEAP: Evolutionary Algorithms Made Easy. J. Mach. Learn. Res. 2012, 13, 2171–2175. [Google Scholar]
- Cities, C. Plug-In Electric Vehicle Handbook for Public Charging Station Hosts; US Department of Energy Publication No. DOE/GO-102012-3275; US Department of Energy: Washington, DC, USA, 2012.
- Taxi, N.; Commission, L. Take Charge: A Roadmap to Electric New York City Taxis; New York Goverment: New York, NY, USA, 2013. Available online: http://www.nyc.gov/html/tlc/downloads/pdf/electric_taxi_task_force_report_20131231.pdf (accessed on 18 November 2020).
- Gorzelany, J. What It Costs to Charge an Electric Vehicle 2019. Available online: https://www.myev.com/research/ev-101/what-it-costs-to-charge-an-electric-vehicle (accessed on 18 November 2020).
- Miao, Y.; Hynan, P.; von Jouanne, A.; Yokochi, A. Current Li-ion battery technologies in electric vehicles and opportunities for advancements. Energies 2019, 12, 1074. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | |
|---|---|
| Abbreviations | Explanation |
| TNC | Transportation Network Companies |
| CS | Charging Station |
| VMT | Vehicle Miles Travelled |
| HEV | Hybrid Electric Vehicle |
| DEAP | Distributed Evolutionary Algorithms in Python |
| GA | Genetic Algorithm |
| EV | Electric Vehicle |
| ET | Electric Taxi |
| ILP | Integer Linear Program |
| IQP | Integer Quadratic Program |
| CFL | Charging Facility Location |
| MaaS | Mobility as a Service |
| DRT | Demand Responsive Traffic |
| OSMnx | Open Street Map networkx |
| Features | |||||
|---|---|---|---|---|---|
| Citation | Queue Delay | Customer Demand | Charging Demand | Capacity | On/Off-Street |
| [20] | x | Deterministic | Point | Constant | Unspecified |
| [31] | x | Deterministic | Point | Constant | Off-street |
| [28] | x | Stochastic | Point | Variable | Unspecified |
| [21] | x | Deterministic | Flow | Variable | Off-street |
| [12] | ✓ | Stochastic | Flow | Variable | Unspecified |
| [24] | ✓ | Deterministic | Flow | Variable | Unspecified |
| [22] | x | Deterministic | Point (taxi stands) | Variable | On-street |
| [23] | ✓ | Deterministic | Spatial-Temporal Flow | Constant | Unspecified |
| [27] | ✓ | Deterministic | Point | Variable | Unspecified |
| [25] | ✓ | Stochastic | Point | Variable | Unspecified |
| [26] | x | Stochastic | Point | Variable | On-street |
| This work | ✓ | Deterministic | Point | Variable | Both |
| Nomenclature | |
|---|---|
| Indices | Description |
| i | Index of a vehicle |
| j | Index of a location |
| r | Index of a recharging node |
| f | Index of a traffic node |
| n | Index of a zone |
| r | Index of a charger |
| Sets | Description |
| C | Candidate nodes for the placement of CS |
| Nodes with pre-existing CSs | |
| R | Fleet recharging nodes |
| H | Zones |
| F | Traffic nodes |
| Fleet vehicles located at recharging node | |
| Traffic vehicles located at traffic node | |
| Parameters | Description |
| q | Conversion parameter from time to monetary units |
| Travelling time from recharging point i to nearest CS at node j | |
| Value of s.t. (6) holds with equality | |
| Maximum number of on-street CSs at zone n | |
| Land rent cost at node j | |
| Single charger infrastructure cost | |
| p | Annual park & charge cost |
| m | Number of chargers in the queuing system |
| Number of chargers at CS j | |
| K | Maximum number of chargers at a candidate node |
| Number of chargers at existing node j | |
| b | Maximum number of vehicles in a queue |
| Minimum value of the probability of b vehicles in a queue | |
| Daily arrival rate of CS at node j | |
| Daily service rate of CS at node j | |
| Variables | Description |
| Assignment of vehicle i to CS at node j | |
| Indicator of a CS at node j | |
| Indicator of the type of a CS off-street or on-street | |
| Indicator of at least m chargers being placed at node j | |
| Number of chargers of CS at node j (integer) | |
| GA Parameters | |
|---|---|
| Parameter | Value |
| Generations | 15 |
| Probability of crossover | 0.4 |
| Probability of mutation | 0.6 |
| Population size | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anastasiadis, E.; Angeloudis, P.; Ainalis, D.; Ye, Q.; Hsu, P.-Y.; Karamanis, R.; Escribano Macias, J.; Stettler, M. On the Selection of Charging Facility Locations for EV-Based Ride-Hailing Services: A Computational Case Study. Sustainability 2021, 13, 168. https://doi.org/10.3390/su13010168
Anastasiadis E, Angeloudis P, Ainalis D, Ye Q, Hsu P-Y, Karamanis R, Escribano Macias J, Stettler M. On the Selection of Charging Facility Locations for EV-Based Ride-Hailing Services: A Computational Case Study. Sustainability. 2021; 13(1):168. https://doi.org/10.3390/su13010168
Chicago/Turabian StyleAnastasiadis, Eleftherios, Panagiotis Angeloudis, Daniel Ainalis, Qiming Ye, Pei-Yuan Hsu, Renos Karamanis, Jose Escribano Macias, and Marc Stettler. 2021. "On the Selection of Charging Facility Locations for EV-Based Ride-Hailing Services: A Computational Case Study" Sustainability 13, no. 1: 168. https://doi.org/10.3390/su13010168
APA StyleAnastasiadis, E., Angeloudis, P., Ainalis, D., Ye, Q., Hsu, P.-Y., Karamanis, R., Escribano Macias, J., & Stettler, M. (2021). On the Selection of Charging Facility Locations for EV-Based Ride-Hailing Services: A Computational Case Study. Sustainability, 13(1), 168. https://doi.org/10.3390/su13010168