A Few Critical Human Factors for Developing Sustainable Autonomous Driving Technology



Abstract
1. Introduction
2. Theoretical Framework
2.1. Driving Automation Levels
- Level 0—No Automation: Zero autonomy; the driver performs all driving tasks.
- Level 1—Driver Assistant: The vehicle is controlled by the driver; however, some driving assist features may be included in the vehicle design.
- Level 2—Partial Automation: The vehicle has combined automated functions, such as acceleration and steering; however, the driver must remain engaged with the driving tasks and monitor the environment at all times.
- Level 3—Conditional Automation: The driver is a necessity but is not required to monitor the environment. The driver must be ready to take control of the vehicle at all times with notice. This level is the focus of this study.
- Level 4—High Automation: The vehicle is capable of performing all driving functions under certain conditions. The driver may have the option to control the vehicle.
- Level 5—Full Automation: The vehicle is capable of performing all driving functions under all conditions. The driver may have the option to control the vehicle.
2.2. Human Error in Autonomous Driving
- Perception: Missed the take-over request (ToR) signal for some reason, such as sleeping and inattention due to involvement in distracting activities other than the monitoring environment.
- Recognition: Perceived the ToR signal but failed to recognize what it means and/or be aware of the situation.
- Response Selection (Decision Making): Understood the overall situation but failed to select the proper response.
- Response Execution: Selected the proper response but slipped to execute it as intended.
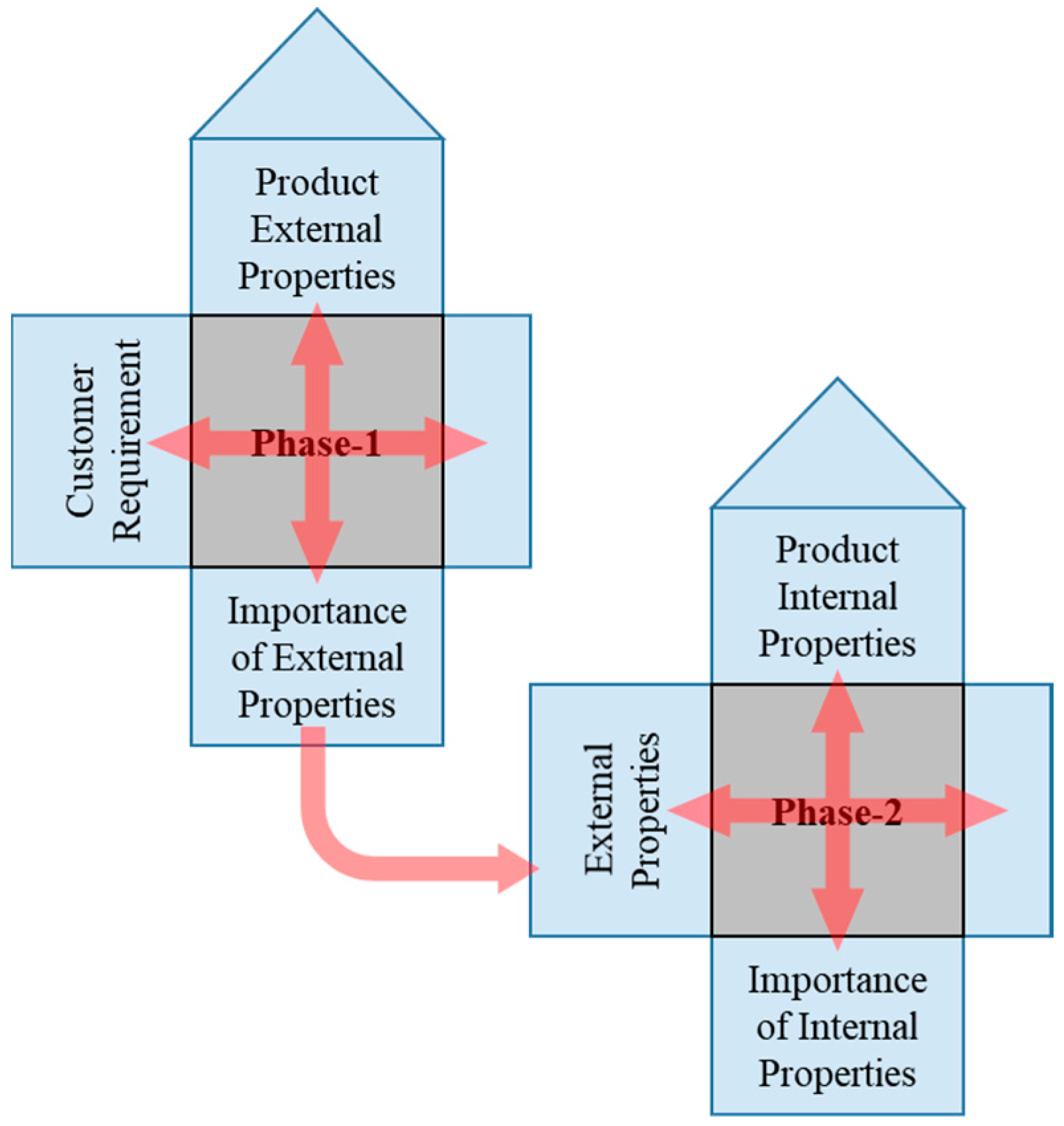
2.3. Quality Function Deployment (QFD)
3. Method
- Autonomous driving (DRI) and human interactions: to get a proper understanding on the current stage of development and research on the field of self-driving cars, including, in general terms, how a take-over is made.
- Nuclear power plant (NPP) and aviation (AVI) human factors: interactions between the drivers in an autonomous car are to a certain extent similar.
- Human factors engineering: to get an understanding of probable human errors and categorize the possible problems in terms of human factors.
4. Results
4.1. Scenario Analysis in a Take-Over
4.2. Human Factors (HFs) in Control Take-Overs
4.3. Interrelationship Matrices
4.3.1. Interrelationship between Take-Over Subtasks and Human Factor Category
- Strong relationship: 9
- Medium relationship: 3
- Weak relationship: 1
- No relationship: 0
4.3.2. Interrelationship between Take-Over Subtasks and Human Factors (HFs)
5. Discussion
6. Conclusions
- Age,
- Focus capabilities,
- Multitasking capabilities,
- IQ,
- Learning speed.
Author Contributions
Funding
Conflicts of Interest
References
- SAE International. Automated Driving—Levels of Driving Automation Are Defined in New SAE International Standard J3016; SAE International: Warrendale, PA, USA, 2014; Archived from the original on 15 January 2019. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations. Transp. Res. Part A Policy Pract. 2016, 77, 167–181. [Google Scholar] [CrossRef]
- Taherdoost, H. Importance of Technology Acceptance Assessment for Successful Implementation and Development of New Technologies. Glob. J. Eng. Sci. 2019, 1. [Google Scholar] [CrossRef]
- Morgan, P.; Alford, C.; Parkhurst, G. Handover Issues in Autonomous Driving: A Literature Review; University of the West of England: Bristol, UK, 2016. [Google Scholar]
- Endsley, M.R. From Here to Autonomy: Lessons Learned from Human–Automation Research. Hum. Factors 2017, 59, 5–27. [Google Scholar] [CrossRef] [PubMed]
- Vlaveld, W. Transition of Control in Highly Automated Vehicles; SWOV Institute for Road Safety Research: Leidschendam, The Netherlands, 2015; R-2015-22. [Google Scholar]
- Wearable AI Market by Product (Smart Watch, Ear Wear, Eye Wear), Operation (On-Device AI, Cloud-Based AI), Component (Processor, Connectivity IC, Sensors), Application (Consumer Electronics, Enterprise, Healthcare), and Geography—Global Forecast to 2023. Available online: https://www.marketsandmarkets.com/Market-Reports/wearable-ai-market-168051207.html (accessed on 21 December 2019).
- Preece, J.; Rogers, Y.; Sharp, H. Interaction Design: Beyond Human-Computer Interaction, 4th ed.; John Wiley & Sons Ltd.: Chichester, UK, 2015. [Google Scholar]
- Son, J.W.; Park, M.O. Situation Awareness and Transitions in Highly Automated Driving: A Framework and Mini-Review. J. Ergon. 2017, 7, 1–6. [Google Scholar] [CrossRef]
- Akao, Y.; Mazur, G.H. The Leading Edge in QFD: Past, Present and Future. Int. J. Qual. Reliab. Manag. 2003, 20, 20–35. [Google Scholar] [CrossRef]
- Tapke, J.; Muller, A.; Johnson, G.; Sieck, J. House of Quality—Steps in Understanding the House of Quality; Iowa State University: Ames, IA, USA, 2009; Available online: https://vardeman.public.iastate.edu/IE361/f01mini/johnson.pdf (accessed on 19 December 2019).
- Youssef, C.; Waldele, M.; Herbert, B. QFD—A link between Customer Requirements and Product Properties. Proceedings of ICED 2007, the 16th International Conference on Engineering Design, Paris, France, 28–31 August 2007. [Google Scholar]
- Walch, M.; Mühl, K.; Baumann, M.; Weber, M. Autonomous Driving: Investigating the Feasibility of Bimodal Take-Over Requests. Int. J. Mob. Hum. Comput. Interact. (IJMHCI) 2017, 9, 58–74. [Google Scholar] [CrossRef]
- Dalijono, T.; Castro, J.; Löwe, K.; Löher, H.J. Reducing Human Error by Improvement of Design and Organization. Process Saf. Environ. Prot. 2006, 84, 191–199. [Google Scholar] [CrossRef]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Loeb, H.; Belwadi, A.; Maheshwari, J.; Shaikh, S. Age and gender differences in emergency takeover from automated to manual driving on simulator. Traffic Inj. Prev. 2019, 1–3. [Google Scholar] [CrossRef]
- Sportillo, D.; Paljic, A.; Ojeda, L. On-road evaluation of autonomous driving training. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 182–190. [Google Scholar]
- Lundqvist, L.M.; Eriksson, L. Age, cognitive load, and multimodal effects on driver response to directional warning. Appl. Ergon. 2019, 76, 147–154. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, P.; Yin, Y.; Lin, L.; Wang, X. Human-like autonomous vehicle speed control by deep reinforcement learning with double Q-learning. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium(IV), Changshu, China, 26–30 June 2018; pp. 1251–1256. [Google Scholar]
- Aghaei, A.S.; Donmez, B.; Liu, C.C.; He, D.; Liu, G.; Plataniotis, K.N.; Chen, H.Y.W.; Sojoudi, Z. Smart Driver Monitoring: When Signal Processing Meets Human Factors: In the Driver’s Seat. IEEE Signal Process. Mag. 2016, 33, 35–48. [Google Scholar] [CrossRef]
- Arakawa, T. Trial verification of human reliance on autonomous vehicles from the viewpoint of human factors. Int. J. Innov. Comput. Inf. Control 2018, 14, 491–501. [Google Scholar]
- Yoo, H.W.; Druml, N.; Brunner, D.; Schwarzl, C.; Thurner, T.; Hennecke, M.; Schitter, G. MEMS-based lidar for autonomous driving. e & i Elektrotechnik Und Inf. 2018, 135, 408–415. [Google Scholar]
- Clark, J.R.; Stanton, N.A.; Revell, K.M. Conditionally and highly automated vehicle handover: A study exploring vocal communication between two drivers. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 699–715. [Google Scholar] [CrossRef]
- Salmon, P.M.; Lenné, M.G.; Stanton, N.A.; Jenkins, D.P.; Walker, G.H. Managing Error on the Open Road: The Contribution of Human Error Models and Methods. Saf. Sci. 2010, 48, 1225–1235. [Google Scholar] [CrossRef]
- Li, X.; Schroeter, R.; Rakotonirainy, A.; Kuo, J.; Lenné, M.G. Effects of different non-driving-related-task display modes on drivers’ eye-movement patterns during take-over in an automated vehicle. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 135–148. [Google Scholar] [CrossRef]
- Dixit, V.V.; Chand, S.; Nair, D.J. Autonomous Vehicles: Disengagements, Accidents and Reaction Times. PLoS ONE 2016, 11, E0168054. [Google Scholar] [CrossRef]
- Blanco, M.; Atwood, J.; Vasquez, H.M. Human Factors Evaluation of Level 2 and Level 3 Automated Driving Concepts; Virginia Tech Transportation Institute: Blacksburg, VA, USA, 2015. [Google Scholar]
- Cho, Y.; Park, J.; Park, S.; Jung, E.S. Technology Acceptance Modeling Based on User Experience for Autonomous Vehicles. J. Ergon. Soc. Korea 2017, 36, 87–108. [Google Scholar]
- Li, L.; Ota, K.; Dong, M. Humanlike driving: Empirical decision-making system for autonomous vehicles. IEEE Trans. Veh. Technol. 2018, 67, 6814–6823. [Google Scholar] [CrossRef]
- Bazargan, M.; Guzhva, V.S. Impact of gender, age and experience of pilots on general aviation accidents. Accid. Anal. Prev. 2011, 43, 962–970. [Google Scholar] [CrossRef]
- Gupta, I.; Kalra, P.; Chawla, P.; Singh, J. Evaluation of Pilot’s Seat Design of Civil Aircraft for Indian Anthropometric Data by using Delmia Human Software. Procedia Manuf. 2018, 26, 70–75. [Google Scholar] [CrossRef]
- Portal: OGHFA-Skybrary Aviation. Available online: https://www.skybrary.aero/index.php/Portal:OGHFA (accessed on 19 March 2019).
- Yang, C.; Yin, T.; Zhao, W.; Huang, D.; Fu, S. Human factors quantification via boundary identification of flight performance margin. Chin. J. Aeronaut. 2014, 27, 977–985. [Google Scholar] [CrossRef][Green Version]
- Brezonakova, A. Pilot burnout as a human factor limitation. Transp. Res. Procedia 2017, 28, 11–15. [Google Scholar] [CrossRef]
- Campbell, J.S.; Castaneda, M.; Pulos, S. Meta-Analysis of Personality Assessments as Predictors of Military Aviation Training Success. Int. J. Aviat. Psychol. 2009, 20, 92–109. [Google Scholar] [CrossRef]
- Ion, D.C. Human Factors in Aviation: Crew Management. In Proceedings of the International Conference of Scientific Paper AFASES 2011, Brasov, Germany, 26–28 May 2011. [Google Scholar]
- Brown, J.P. The effect of automation on human factors in aviation. J. Instrum. Autom. Syst. 2016, 3, 31–46. [Google Scholar] [CrossRef]
- Mohrmann, F.; Stoop, J. Airmanship 2.0: Innovating aviation human factors forensics to necessarily proactive role. In Proceedings of the Future Safety: Has the Past Become Irrelevant? The Hague, The Netherlands, 3–5 September 2019. [Google Scholar]
- Holland Cook, C.C. Alcohol and aviation. Addiction 1997, 92, 539–555. [Google Scholar] [CrossRef]
- Hebbar, P.A.; Pashilkar, A.A. Analysing human pilot control behaviour for an aircraft handling qualities task. In Proceedings of the 7th Symposium on Applied Aerodynamics and Design of Aerospace Vehicles, Trivandrun, Kerala, India, 17–20 December 2015. [Google Scholar]
- Kappenberger, C.; Stepniczka, I. HMIAC-Survey on Human-Machine Interaction in Aircraft Cockpits. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Hunter, D.R. Measurement of hazardous attitudes among pilots. Int. J. Aviat. Psychol. 2005, 15, 23–43. [Google Scholar] [CrossRef]
- Hwang, S.L.; Liang, S.F.M.; Liu, T.Y.Y.; Yang, Y.J.; Chen, P.Y.; Chuang, C.F. Evaluation of Human Factors in Interface Design in Main Control Rooms. Nucl. Eng. Des. 2009, 239, 3069–3075. [Google Scholar] [CrossRef]
- Carvalho, P.V.; dos Santos, I.L.; Gomes, J.O.; Borges, M.R.; Guerlain, S. Human Factors Approach for Evaluation and Redesign of Human–System Interfaces of a Nuclear Power Plant Simulator. Displays 2008, 29, 273–284. [Google Scholar] [CrossRef]
- Han, S.H.; Yang, H.; Im, D.G. Designing a Human–Computer Interface for a Process Control Room: A Case Study of a Steel Manufacturing Company. Int. J. Ind. Ergon. 2007, 37, 383–393. [Google Scholar] [CrossRef]
- Guttromson, R.T.; Schur, A.; Greitzer, F.L.; Paget, M.L. Human Factors for Situation Assessment in Power Grid Operations; Pacific Northwest National Laboratory (PNNL): Richland, WA, USA, 2007. [Google Scholar]
- Carvalho, P.V.; dos Santos, I.L.; Vidal, M.C. Safety Implications of Cultural and Cognitive Issues in Nuclear Power Plant Operation. Appl. Ergon. 2006, 37, 211–223. [Google Scholar] [CrossRef] [PubMed]
- DeVita-Cochrane, C.C. Personality Factors and Nuclear Power Plant Operators: Initial License Success. Ph.D. Thesis, Walden University, Minneapolis, MN, USA, 2015. [Google Scholar]
- Guide, I.S. Recruitment, Qualification and Training of Personnel for Nuclear Power Plants; International Atomic Energy Agency Standard Series No. NS-G-2.8; IAEA: Vienna, Austria, 2002. [Google Scholar]
- Singh, S. Critical Reasons for Crashed Investigated in The National Motor Vehicle Crash Causation Survey; DOT HS 812 115; NHTSA’s National Center for Statistics and Analysis: Washington, DC, USA, 2015. [Google Scholar]
- Nielsen, J. Usability Engineering, 1st ed.; Morgan Kaufmann: Burlington, NJ, USA, 1994. [Google Scholar]
- ISO 9241-11. Ergonomics Requirements for Office Work with Visual Display Terminals (VDTs)-Part 11: Guidance on Usability. Available online: https://www.iso.org/standard/16883.html (accessed on 6 October 2017).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step # | Tools | Output |
|---|---|---|
| 1 | Take-over scenario analysis | Required subtasks |
| 2 | Literature review of HFs | HFs and their categories |
| 3 | Interrelationship analysis | Relation and importance: Take-over subtasks and HF category (Phase 1) |
| 4 | Relation and importance: Take-over subtasks and HFs (Phase 2) |
| HF Category | AVI | NPP | DRI | Human Factor | Levels | Reference |
|---|---|---|---|---|---|---|
| 1. Demography | * | * | 1. Gender | Male Female | Kaur and Rampersad, 2018 [15] Loeb et al., 2019 [16] Bazargan and Guzhva, 2011 [30] | |
| * | * | * | 2. Age | Age < 20 20 ≤ Age < 40 40 ≤ Age < 60 Age ≥ 60 | Kaur and Rampersad, 2018 [15] Loeb et al., 2019 [16] Sportillo et al., 2019 [17] Lundqvist and Eriksson, 2019 [18] Zhang et al., 2018 [19] Bazargan and Guzhva, 2011 [30] Hwang et al., 2009 [43] | |
| * | 3. Height | Taller than average Average Shorter than average | Gupta et al., 2018 [31] | |||
| * | 4. Weight | Normal Overweight Obese L1, L2 Obese L3 | Gupta et al., 2018 [31] | |||
| 5. Residency | Urban Suburban Rural | |||||
| 2. Physical capabilities | * | * | * | 6. Vision | Normal level Low level Chronic level | Aghaei et al., 2016 [20] Arakawa, 2018 [21] Yoo et al., 2018 [22] OGHFA, 2017 [32] Yang et al., 2014 [33] Hwang et al., 2009 [43] Carvalho et al., 2008 [44] Han et al., 2007 [45] |
| * | * | * | 7. Hearing | Clark et al., 2019 [23] OGHFA, 2017 [32] Hwang et al., 2009 [43] Han et al., 2007 [45] | ||
| * | 8. Cardiovascular | Aghaei et al., 2016 [20] | ||||
| * | 9. Pulmonary | Aghaei et al., 2016 [20] | ||||
| * | * | 10. Flexibility | Yang et al., 2014 [33] Carvalho et al., 2008 [44] Pacific Northwest National Laboratory, 2007 [46] | |||
| * | * | 11. Coordination | Salmon et al., 2010 [24] Yang et al., 2014 [33] | |||
| 3. Health | * | 12. Chronic/temporal diseases | Yes Chronic Yes Temporal No | Brezonakova, 2017 [34] Campbell et al., 2009 [35] Ion, 2011 [36] | ||
| * | 13. Healthy lifestyle | Hydrated Regular Exercise | Brezonakova, 2017 [35] Ion, 2011 [36] | |||
| * | * | 14. Emotionally stable | Stress Depression Anxiety | Aghaei et al., 2016 [20] Ion, 2011 [36] Brown, 2016 [37] Mohrmann and Stoop, 2019 [38] | ||
| * | * | 15. Amount of sleep | Between 6 and 10 h Less than 6 h More than 6 h | Aghaei et al., 2016 [20] Arakawa, 2018 [21] OGHFA, 2017 [32] Brezonakova, 2017 [34] | ||
| * | 16. Diet | Fasting religious beliefs Fasting medical check Supervised Unsupervised Disorders Eating time | Ion, 2011 [36] | |||
| * | 17. Drugs | Depressant or Hallucinogen Performance enhancer Painkiller Stimulant | Holland and Cook, 1997 [39] | |||
| 4. Cognitive | * | * | * | 18. Focus | Easy to divert Ease of boredom | Arakawa, 2018 [21] Salmon et al., 2010 [24] Li et al., 2020 [25] Oghfa, 2017 [32] Campbell et al., 2009 [35] Carvalho et al., 2006 [47] |
| * | * | 19. Multitasking | Multitasker Not able to multitask | Aghaei et al., 2016 [20] Li et al., 2020 [25] Carvalho et al., 2006 [47] | ||
| * | * | 20. Intelligence quotient (IQ) | Superior Average Lower | Mohrmann and Stoop, 2019 [38] Hwang et al., 2009 [43] Han et al., 2007 [45] | ||
| * | 21. Learning speed | Superior Average Lower | Salmon et al., 2010 [24] Dixit et al., 2016 [26] Virginia Tech Transportation Institute, 2017 [27] | |||
| * | * | 22. Education level | University graduate level University pre-graduate level High school level Lower than High school | Kaur and Rampersad, 2018 [15] Hwang et al., 2009 [43] | ||
| 5. Experience | * | * | * | 23. License type | Professional Not professional | Kaur and Rampersad, 2018 [15] Hebbar and Pashilkar, 2015 [40] DeVita-Cochrane, 2015 [48] |
| * | * | 24. Driving experience | Beginner Experienced | Zhang et al., 2018 [19] Ion, 2011 [36] Bazargan and Guzhva, 2011 [30] DeVita-Cochrane, 2015 [48] | ||
| * | * | 25. ADAS exposure years | No exposure Less than 1 year More than 1 year | Kaur and Rampersad, 2018 [15] Cho et al., 2017 [28] Kappenberger and Stepniczka, 2012 [41] | ||
| * | * | 26. Autonomous driving interactions | Dixit et al., 2016 [26] Kappenberger and Stepniczka, 2012 [41] | |||
| 6. Behavior | * | * | 27. Personality | Neuroticism Extraversion Openness to experience Agreeableness Conscientiousness | Ion, 2011 [36] Hebbar and Pashilkar, 2015 [40] Hunter, 2005 [42] DeVita-Cochrane, 2015 [48] | |
| * | * | 28. Driving style | Aggressive Defensive | Salmon et al., 2010 [24] Li et al., 2018 [29] Hunter, 2005 [42] | ||
| * | 29. Car ownership | Own car Rented car Company car | Kaur and Rampersad, 2018 [15] Salmon et al., 2010 [24] | |||
| 7. Cultural influence | 30. Family | Civil status Dependents | ||||
| * | * | 31. Collectivism | Individualism Groupism | Campbell et al., 2009 [35] Ion, 2011 [36] International Atomic Energy Agency, 2002 [49] | ||
| 8. Work | * | 32. Job position | Operative Administrative Supervision Management Strategic | International Atomic Energy Agency, 2002 [49] | ||
| * | * | 33. Working shift | Day Night Rotative | Salmon et al., 2010 [24] Carvalho et al., 2006 [47] | ||
| 9. Tech trust | 34. Smartphone user | Average hours use Higher average hours use | ||||
| 35. Computer user | ||||||
| * | * | 36. Trust in ADAS | High confidence No confidence | Dixit et al., 2016 [26] Cho et al., 2017 [28] Kappenberger and Stepniczka, 2012 [41] |
| Critical Reason | Estimated (Based on 94% of the NMVXCCS Crashed) | Take-Over Subtasks | |
|---|---|---|---|
| Number | Percentage * ± 95% Conf. Limits | ||
| Recognition error | 845,000 | 41% ± 2.2% | 2. Recognize Warning |
| Decision error | 684,000 | 33% ± 3.7% | 3. Situation Awareness 4. Decide Action |
| Performance error | 210,000 | 11% ± 2.7% | 5. Avoid Danger 6. Stabilize Driving Mode |
| Non-performance error (e.g., sleep) | 145,000 | 7% ± 1.0% | 1. Perceive Warning Signal |
| Others | 162,000 | 8% ± 1.9% | |
| Total | 2,046,000 | 100% | |
| * Percentages are based on unrounded estimated frequencies (Data source: NMVCCS 2005–2007) | |||
| Take-Over Subtasks | HF Category | Weight | Critical Reason | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Demography | Physical Capabilities | Health | Cognitive | Experience | Behavior | Cultural Influence | Work | Tech Trust | |||
| 2. Recognize Warning | 9 | 9 | 3 | 9 | 9 | 3 | 1 | 1 | 3 | 0.41 | Recognition Error |
| 3. Situation Awareness 4. Decide Action | 3 | 1 | 9 | 3 | 3 | 1 | 1 | 3 | 3 | 0.33 | Decision Error |
| 5. Avoid Danger 6. Stabilize Driving Mode | 3 | 1 | 1 | 9 | 3 | 3 | 3 | 3 | 1 | 0.11 | Performance Error |
| 1. Perceive Warning Signal | 9 | 1 | 3 | 9 | 3 | 1 | 1 | 1 | 1 | 0.07 | Non-Performance Error |
| Importance | 5.64 | 4.2 | 4.52 | 6.3 | 5.22 | 1.96 | 1.14 | 1.18 | 2.4 | ||
| Ratio (%) | 17.32 | 12.90 | 13.88 | 19.35 | 16.03 | 6.02 | 3.50 | 3.62 | 7.37 | ||
| Priority | 2 | 5 | 4 | 1 | 3 | 7 | 9 | 8 | 6 | ||
| Take-Over Subtasks | HFs in Demography and Cognitive Workload | Weight | Critical Reason | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Gender | Age | Height | Weight | Residency | Focus | Multitasking | IQ | Learning Speed | Education Level | |||
| 2. Recognize Warning | 1 | 9 | 0 | 0 | 1 | 9 | 9 | 3 | 3 | 3 | 0.41 | Recognition Error |
| 3. Situation Awareness 4. Decide Action | 1 | 9 | 1 | 1 | 3 | 9 | 3 | 9 | 9 | 3 | 0.33 | Decision Error |
| 5. Avoid Danger 6. Stabilize Driving Mode | 1 | 9 | 0 | 0 | 3 | 9 | 9 | 9 | 3 | 1 | 0.11 | Performance Error |
| 1. Perceive Warning Signal | 1 | 9 | 0 | 0 | 1 | 9 | 9 | 3 | 3 | 3 | 0.07 | Non-Performance Error |
| Importance | 0.92 | 8.28 | 0.33 | 0.33 | 1.80 | 8.28 | 7.62 | 5.4 | 4.74 | 2.54 | ||
| Ratio (%) | 2.29 | 20.58 | 0.82 | 0.82 | 4.47 | 20.58 | 18.94 | 13.42 | 11.78 | 6.31 | ||
| Priority | 8 | 1 | 9 | 9 | 7 | 1 | 3 | 4 | 5 | 6 | ||
| Human Factor | Levels |
|---|---|
| Age | * Age 20 * 20 Age 40 * 40 Age 60 * Age 60 |
| Focus | * Easy to divert * Ease of boredom |
| Multitasking | * Multitasker * Not able to multitask |
| IQ | * Superior (110) * Average (90–109) * Lower (90) |
| Learning speed | * Superior * Average * Lower |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cárdenas, J.F.S.; Shin, J.G.; Kim, S.H. A Few Critical Human Factors for Developing Sustainable Autonomous Driving Technology. Sustainability 2020, 12, 3030. https://doi.org/10.3390/su12073030
Cárdenas JFS, Shin JG, Kim SH. A Few Critical Human Factors for Developing Sustainable Autonomous Driving Technology. Sustainability. 2020; 12(7):3030. https://doi.org/10.3390/su12073030
Chicago/Turabian StyleCárdenas, José Fernando Sabando, Jong Gyu Shin, and Sang Ho Kim. 2020. "A Few Critical Human Factors for Developing Sustainable Autonomous Driving Technology" Sustainability 12, no. 7: 3030. https://doi.org/10.3390/su12073030
APA StyleCárdenas, J. F. S., Shin, J. G., & Kim, S. H. (2020). A Few Critical Human Factors for Developing Sustainable Autonomous Driving Technology. Sustainability, 12(7), 3030. https://doi.org/10.3390/su12073030