Modeling Collision Probability on Freeway: Accounting for Different Types and Severities in Various LOS


Abstract
1. Introduction
2. Literature Review
3. Data Sources
4. Methods
4.1. Bayesian Conditional Logit Model
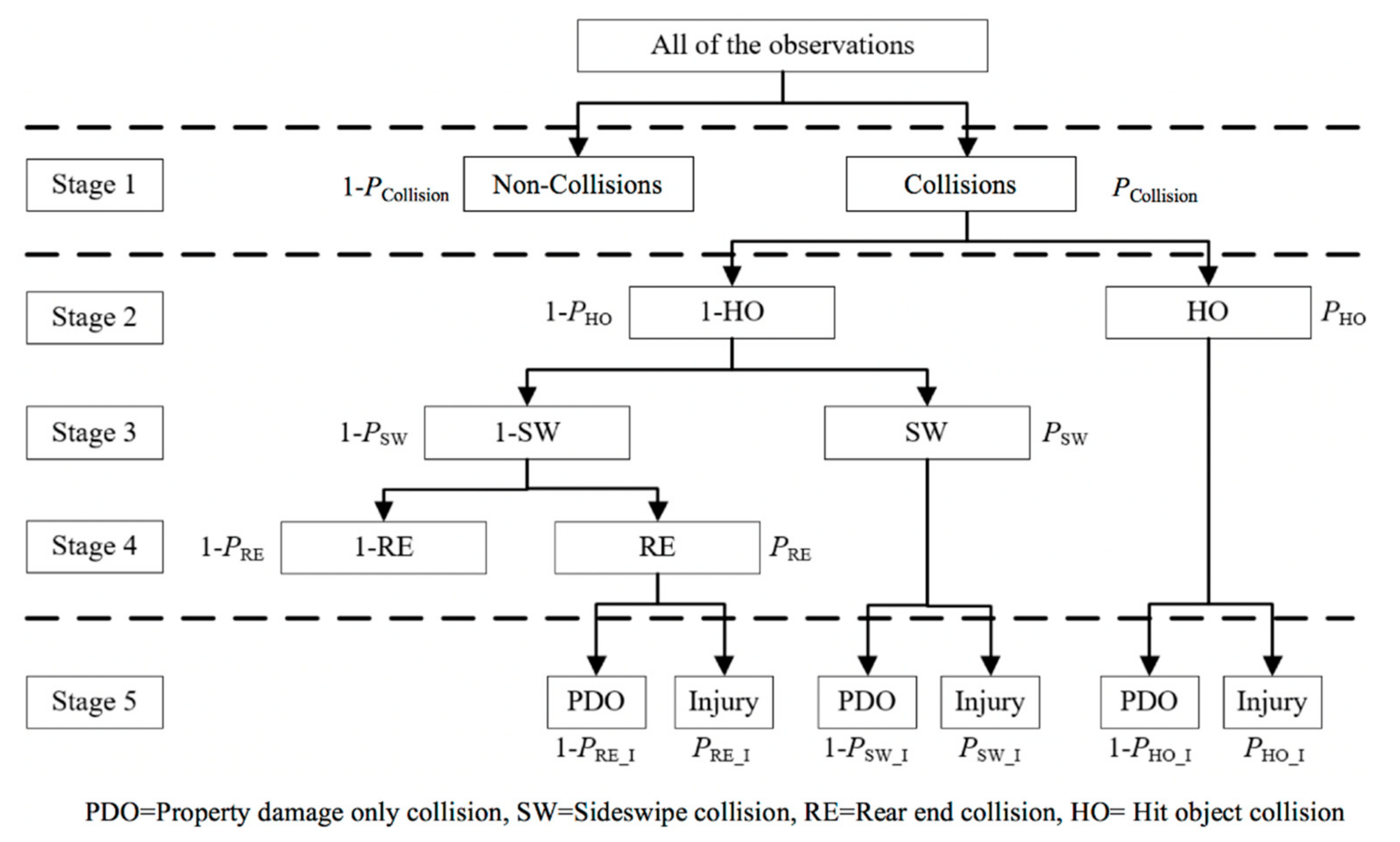
4.2. Bayesian Random Parameter Sequential Logit Model
- There is a hypothesis of this method that the parameter estimates of different collision types and severities are the same [20,21]. However, compared to the ordered logit model, the sequential logit model can explain the difference of various contributing factors across different collision types and severities [20,21].
- Moreover, collisions were affected by various traffic-related factors [24,25,26]. Thus, there is an unobserved heterogeneity in the sequential logit model [27,28,29]. The contributing factors in this study can not explain all of the variance in collision types and severities. The unobserved heterogeneity in models can result in inconsistent and biased estimation [30,31,32]. To overcome the limitation of unobserved heterogeneity in the sequential logit model, random parameters were applied in this study.
× P(Hit object collision|Collision) × P(injury collision|Hit object collision) = PCollision × PHO × PHO_I
× P(PDO collision丨Hit object collision) = PCollision × PHO × (1 − PHO_I)
丨Collision) × P(Sideswipe collision丨Non-Hit object collision) × P(injury collision
丨Sideswipe collision) = PCollision×(1 − PHO) × PSW × PSW_I
collision|Collision) × P(Sideswipe collision|Non-Hit object collision) × P(PDO
collision|Sideswipe collision) = PCollision × (1 − PHO) × PSW×(1 − PSW_I)
× P(Non-Sideswipe collision|Non-Hit object collision) × P(Rear end collision|Non-
Sideswipe collision) × P(injury collision|Rear end collision) = PCollision × (1−PHO) × (1−PSW)
× PRE × PRE_I
collision|Collision) × P(Non-Sideswipe collision|Non-Hit object collision) × P(Rear end
collision|Non-Sideswipe collision) × P(PDO collision|Rear end collision) = PCollision ×
(1−PHO) × (1−PSW) × PRE × (1−PRE_I)
5. Results and Discussion
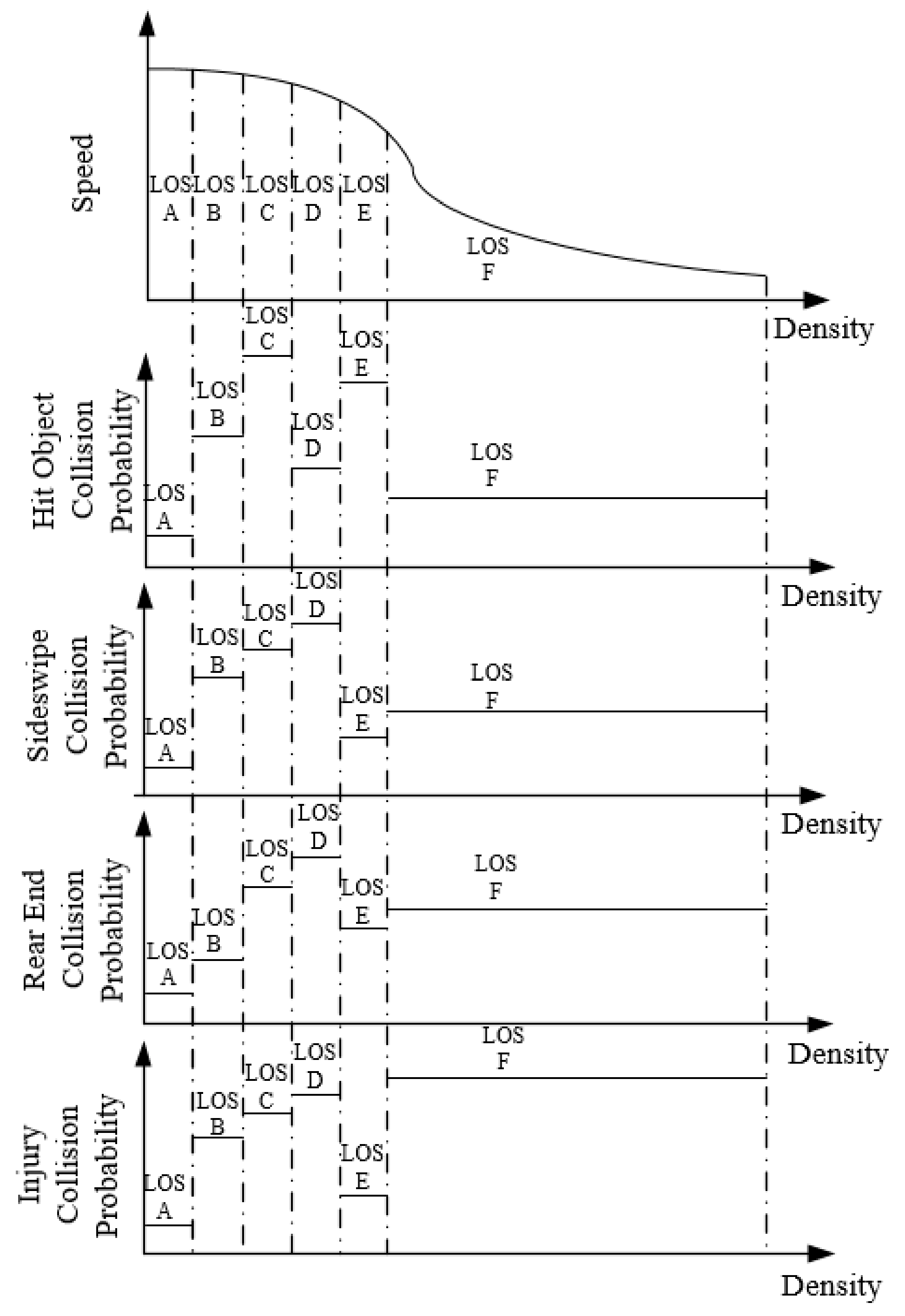
5.1. Safety Performance of LOS by Different Collision Types and Severities
5.2. The Sequential Logit Model for Collision Types and Severities
5.2.1. Sequential Model for Collision Types
5.2.2. Sequential Model for Collision Severities by Different Types
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, B.; Liu, Z.-H.; Chan, C.-Y.; Xu, C.; Guo, Y. Identifying the crash characteristics on freeway segments based on different ramp influence areas. Traffic Inj. Prev. 2019, 20, 386–391. [Google Scholar] [CrossRef]
- Abdel-Aty, M.; Pemmanaboina, R. Calibrating a Real-Time Traffic Crash-Prediction Model Using Archived Weather and ITS Traffic Data. IEEE Trans. Intell. Transp. Syst. 2006, 7, 167–174. [Google Scholar] [CrossRef]
- Hossain, M.; Muromachi, Y. Understanding Crash Mechanism and Selecting Appropriate Interventions for Real-Time Hazard Mitigation on Urban Expressways. Transp. Res. Rec. 2011, 2213, 53–62. [Google Scholar] [CrossRef]
- Yang, B.; Guo, Y.; Xu, C. Analysis of freeway secondary crashes with a two-Step method by loop detector data. IEEE Access 2019, 7, 22884–22890. [Google Scholar] [CrossRef]
- Giovanny, P.; Blanca, A.; Camino, G.; Francisco, A. Influential Factors on Injury Severity for Drivers of Light Trucks and Vans with Machine Learning Methods. Sustainability 2020, 12, 1324. [Google Scholar]
- Golob, T.F.; Recker, W.W.; Alvarez, V.M. Freeway safety as a function of traffic flow. Accid. Anal. Prev. 2004, 36, 933–946. [Google Scholar] [CrossRef]
- Golob, T.F.; Recker, W.W. A method for relating type of crash to traffic flow characteristics on urban freeways. Transp. Res. Part A Policy Pract. 2004, 38, 53–80. [Google Scholar] [CrossRef]
- Li, Z.; Wang, W.; Chen, R.; Liu, P.; Xu, C. Evaluation of the Impacts of Speed Variation on Freeway Traffic Collisions in Various Traffic States. Traffic Inj. Prev. 2013, 14, 861–866. [Google Scholar] [CrossRef]
- Li, Z.; Wang, W.; Chen, R.; Liu, P. Conditional inference tree-based analysis of hazardous traffic conditions for rear-end and sideswipe collisions with implications for control strategies on freeways. IET Intell. Transp. Syst. 2014, 8, 509–518. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Q.; Wang, Y.; Weng, J.; Yan, X. Analysis of Sideswipe Collision Precursors Considering the Spatial-Temporal Characteristics of Freeway Traffic. J. Transp. Eng. 2016, 142, 04016064. [Google Scholar] [CrossRef]
- Kwak, H.-C.; Kho, S. Predicting crash risk and identifying crash precursors on Korean expressways using loop detector data. Accid. Anal. Prev. 2016, 88, 9–19. [Google Scholar] [CrossRef]
- Xu, C.; Wang, W.; Liu, P.; Zhang, F. Development of a Real-Time Crash Risk Prediction Model Incorporating the Various Crash Mechanisms Across Different Traffic States. Traffic Inj. Prev. 2014, 16, 28–35. [Google Scholar] [CrossRef]
- Xu, C.; Liu, Z.-H.; Wang, W.; Li, Z. Safety performance of traffic phases and phase transitions in three phase traffic theory. Accid. Anal. Prev. 2015, 85, 45–57. [Google Scholar] [CrossRef]
- Hall, F.; Hurdle, V.; Banks, J. Synthesis of recent work on the nature of speed-flow and flow-occupancy (or density) relationships on freeways. Transp. Res. Rec. 1992, 1365, 12–18. [Google Scholar]
- Wu, N. A new approach for modeling of Fundamental Diagrams. Transp. Res. Part A Policy Pract. 2002, 36, 867–884. [Google Scholar] [CrossRef]
- Kerner, B.S. Empirical macroscopic features of spatial-temporal traffic patterns at highway bottlenecks. Phys. Rev. E 2002, 65, 1–30. [Google Scholar] [CrossRef] [PubMed]
- Transportation Research Board. Highway Capacity Manual; Transportation Research Board of the National Academies: Washington, DC, USA, 2010. [Google Scholar]
- Bruce, N.; Pope, D.; Stanistreet, D. Quantitative Methods for Health Research; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Xiao, G.; Wang, Z. Empirical Study on Bikesharing Brand Selection in China in the Post-Sharing Era. Sustainability 2020, 12, 3125. [Google Scholar] [CrossRef]
- Yamamoto, T.; Shankar, V.N. Bivariate ordered-response probit model of driver’s and passenger’s injury severities in collisions with fixed objects. Accid. Anal. Prev. 2004, 36, 869–876. [Google Scholar] [CrossRef]
- Yamamoto, T.; Hashiji, J.; Shankar, V.N. Underreporting in traffic accident data, bias in parameters and the structure of injury severity models. Accid. Anal. Prev. 2008, 40, 1320–1329. [Google Scholar] [CrossRef] [PubMed]
- Lord, D.; Mannering, F.L. The statistical analysis of crash-frequency data: A review and assessment of methodological alternatives. Transp. Res. Part A Policy Pract. 2010, 44, 291–305. [Google Scholar] [CrossRef]
- Mothafer, G.I.; Yamamoto, T.; Shankar, V.N. Evaluating crash type covariances and roadway geometric marginal effects using the multivariate Poisson gamma mixture model. Anal. Methods Accid. Res. 2016, 9, 16–26. [Google Scholar] [CrossRef]
- Milton, J.C.; Shankar, V.N.; Mannering, F.L. Highway accident severities and the mixed logit model: An exploratory empirical analysis. Accid. Anal. Prev. 2008, 40, 260–266. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Li, H.; Zhao, J.; Chen, J.; Wang, W. Investigating the relationship between jobs-housing balance and traffic safety. Accid. Anal. Prev. 2017, 107, 126–136. [Google Scholar] [CrossRef] [PubMed]
- Mannering, F.L.; Shankar, V.N.; Bhat, C.R. Unobserved heterogeneity and the statistical analysis of highway accident data. Anal. Methods Accid. Res. 2016, 11, 1–16. [Google Scholar] [CrossRef]
- Venkataraman, N.; Shankar, V.; Ulfarsson, G.F.; Deptuch, D. A heterogeneity-in-means count model for evaluating the effects of interchange type on heterogeneous influences of interstate geometrics on crash frequencies. Anal. Methods Accid. Res. 2014, 2, 12–20. [Google Scholar] [CrossRef]
- Venkataraman, N.; Ulfarsson, G.F.; Shankar, V.N. Extending the Highway Safety Manual (HSM) framework for traffic safety performance evaluation. Saf. Sci. 2014, 64, 146–154. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, P.; Wu, Y.; Yang, M. Traffic Conflict Model Based on Bayesian Multivariate Poisson-lognormal Normal Distribution. China J. Highw. Transp. 2018, 31, 101–109. [Google Scholar]
- Guo, Y.; Li, Z.; Liu, Z.-H.; Wu, Y. Modeling correlation and heterogeneity in crash rates by collision types using full bayesian random parameters multivariate Tobit model. Accid. Anal. Prev. 2019, 128, 164–174. [Google Scholar] [CrossRef]
- Guo, Y.; Li, Z.; Sayed, T. Analysis of Crash Rates at Freeway Diverge Areas using Bayesian Tobit Modeling Framework. Transp. Res. Rec. 2019, 2673, 652–662. [Google Scholar] [CrossRef]
- Guo, Y.; Osama, A.; Sayed, T. A cross-comparison of different techniques for modeling macro-level cyclist crashes. Accid. Anal. Prev. 2018, 113, 38–46. [Google Scholar] [CrossRef]
- Rubin, G.P. Minor surgery. A text and atlas. J. S. Brown. 280 × 255 mm. Pp. 220 + xii. Illustrated and colour. 1986. London: Chapman and Hall. £45.00. BJS 1987, 74, 438. [Google Scholar] [CrossRef]
- Xu, C.; Wang, Y.; Liu, P.; Wang, W.; Bao, J. Quantitative risk assessment of freeway crash casualty using high-resolution traffic data. Reliab. Eng. Syst. Saf. 2018, 169, 299–311. [Google Scholar] [CrossRef]
- Qin, X.; Wang, K.; Cutler, C.E. Analysis of Crash Severity Based on Vehicle Damage and Occupant Injuries. Transp. Res. Rec. 2013, 2386, 95–102. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, J.; Liang, Q.; Ma, F. Modeling Impacts of Speed Reduction on Traffic Efficiency on Expressway Uphill Sections. Sustainability 2020, 12, 587. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| LOS | Boundary Value of Density (Vehicle/km/Lane) |
|---|---|
| LOS A | ≤18 |
| LOS B | 18–29 |
| LOS C | 29–42 |
| LOS D | 42–56 |
| LOS E | 56–72 |
| LOS F | >72 |
| LOS | Hit Object Collision | Sideswipe Collision | Rear end Collision | Injury Collision | Total |
|---|---|---|---|---|---|
| LOS A | 1364 | 1888 | 4634 | 2386 | 8326 |
| LOS B | 54 | 139 | 593 | 199 | 811 |
| LOS C | 31 | 82 | 381 | 130 | 505 |
| LOS D | 5 | 28 | 134 | 43 | 169 |
| LOS E | 6 | 6 | 34 | 13 | 47 |
| LOS F | 6 | 13 | 37 | 19 | 61 |
| Total | 1466 | 2156 | 5813 | 2790 | 9919 |
| Variables | Mean | MC Error | 2.50% | 97.50% | Odds Ratio |
|---|---|---|---|---|---|
| Hit Object Collision | |||||
| LOS B | 1.057 | 0.202 | 0.656 | 1.454 | 2.878 |
| LOS C | 1.463 | 0.262 | 0.937 | 1.956 | 4.319 |
| LOS D | 1.040 | 0.668 | −0.373 | 2.256 | 2.829 |
| LOS E | 1.183 | 0.604 | −0.043 | 2.331 | 3.264 |
| LOS F | 1.023 | 1.121 | −1.142 | 3.270 | 2.782 |
| LOS A * | |||||
| Sideswipe Collision | |||||
| LOS B | 1.141 | 0.126 | 0.898 | 1.379 | 3.130 |
| LOS C | 1.470 | 0.157 | 1.174 | 1.784 | 4.349 |
| LOS D | 1.985 | 0.287 | 1.443 | 2.547 | 7.279 |
| LOS E | 0.484 | 0.655 | −0.908 | 1.668 | 1.623 |
| LOS F | 0.737 | 0.821 | −0.983 | 2.290 | 2.090 |
| LOS A * | |||||
| Rear end Collision | |||||
| LOS B | 1.385 | 0.065 | 1.264 | 1.515 | 3.995 |
| LOS C | 1.797 | 0.085 | 1.628 | 1.963 | 6.032 |
| LOS D | 1.957 | 0.136 | 1.69 | 2.223 | 7.078 |
| LOS E | 1.623 | 0.242 | 1.153 | 2.089 | 5.053 |
| LOS F | 1.757 | 0.353 | 1.078 | 2.448 | 5.795 |
| LOS A * | |||||
| Injury Collision | |||||
| LOS B | 1.345 | 0.102 | 1.148 | 1.541 | 3.838 |
| LOS C | 1.594 | 0.132 | 1.329 | 1.857 | 4.923 |
| LOS D | 1.699 | 0.216 | 1.273 | 2.118 | 5.468 |
| LOS E | 1.251 | 0.372 | 0.497 | 1.977 | 3.494 |
| LOS F | 1.808 | 0.527 | 0.78 | 2.828 | 6.098 |
| LOS A * | |||||
| Candidate Variables | Explanation |
|---|---|
| Vi | Visibility (mile) |
| We | 1 = worse weather conditions; 0 = normal weather conditions; |
| Rs | 1 = worse road surface; 0 = normal road surface |
| Ra | 1 = ramp segment; 0 = non-ramp segment |
| Nl | Number of lanes |
| LOS A | 1 = LOS A; 0 = otherwise |
| LOS B | 1 = LOS B; 0 = otherwise |
| LOS C | 1 = LOS C; 0 = otherwise |
| LOS D | 1 = LOS D; 0 = otherwise |
| LOS E | 1 = LOS E; 0 = otherwise |
| LOS F | 1 = LOS F; 0 = otherwise |
| Variables | Mean | MC Error | 2.50% | Median | 97.50% |
|---|---|---|---|---|---|
| Stage 1 | |||||
| Vi | −0.111 | 0.014 | −0.136 | −0.126 | −0.001 |
| LOS A | −0.017 | 0.003 | −0.025 | −0.018 | 0.000 |
| LOS C | 0.049 | 0.009 | 0.013 | 0.051 | 0.082 |
| Stage 2 | |||||
| Nl | −0.146 | 0.008 | −0.196 | −0.150 | −0.073 |
| Vi | −0.153 | 0.002 | −0.163 | −0.155 | −0.141 |
| Rs | 0.264 | 0.023 | 0.008 | 0.287 | 0.458 |
| LOS B | −0.211 | 0.020 | −0.414 | −0.169 | −0.049 |
| LOS C | −0.279 | 0.023 | −0.390 | −0.335 | −0.016 |
| LOS D | −0.622 | 0.061 | −1.078 | −0.539 | −0.054 |
| Stage 3 | |||||
| Nl | −0.033 | 0.002 | −0.061 | −0.031 | −0.017 |
| Ra | −0.255 | 0.041 | −0.655 | −0.135 | −0.001 |
| Vi | −0.106 | 0.002 | −0.119 | −0.107 | −0.087 |
| LOS A | −0.045 | 0.002 | −0.059 | −0.046 | −0.015 |
| LOS B | −0.137 | 0.015 | −0.241 | −0.164 | −0.033 |
| LOS C | −0.272 | 0.019 | −0.398 | −0.301 | −0.019 |
| LOS D | −0.469 | 0.056 | −0.908 | −0.614 | −0.010 |
| Stage 4 | |||||
| Nl | 0.170 | 0.005 | 0.097 | 0.181 | 0.198 |
| Vi | 0.196 | 0.003 | 0.151 | 0.199 | 0.208 |
| Rs | 0.158 | 0.013 | 0.029 | 0.165 | 0.268 |
| LOS A | 0.030 | 0.003 | 0.005 | 0.029 | 0.059 |
| LOS C | 0.201 | 0.022 | 0.086 | 0.136 | 0.372 |
| LOS D | 0.126 | 0.011 | 0.011 | 0.109 | 0.261 |
| Variables | Mean | MC Error | 2.50% | Median | 97.50% |
|---|---|---|---|---|---|
| Hit Object Collision | |||||
| Nl | −0.048 | 0.008 | −0.073 | −0.057 | −0.001 |
| Ra | −0.062 | 0.013 | −0.130 | −0.059 | −0.006 |
| We | −0.095 | 0.012 | −0.129 | −0.110 | −0.029 |
| Vi | −0.040 | 0.003 | −0.052 | −0.041 | −0.016 |
| Sideswipe Collision | |||||
| Nl | −0.055 | 0.006 | −0.068 | −0.059 | −0.011 |
| Ra | −0.079 | 0.014 | −0.168 | −0.072 | −0.004 |
| Vi | −0.100 | 0.010 | −0.120 | −0.111 | −0.020 |
| LOS D | −0.367 | 0.051 | −0.479 | −0.431 | −0.050 |
| Rear end Collision | |||||
| Nl | −0.073 | 0.004 | −0.102 | −0.075 | −0.036 |
| We | −0.074 | 0.008 | −0.140 | −0.068 | −0.002 |
| Vi | −0.049 | 0.002 | −0.069 | −0.050 | −0.034 |
| Rs | −0.115 | 0.023 | −0.348 | −0.067 | −0.017 |
| LOS A | −0.021 | 0.002 | −0.036 | −0.022 | −0.003 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Wu, Y.; Zhang, W.; Bao, J. Modeling Collision Probability on Freeway: Accounting for Different Types and Severities in Various LOS. Sustainability 2020, 12, 7386. https://doi.org/10.3390/su12187386
Yang B, Wu Y, Zhang W, Bao J. Modeling Collision Probability on Freeway: Accounting for Different Types and Severities in Various LOS. Sustainability. 2020; 12(18):7386. https://doi.org/10.3390/su12187386
Chicago/Turabian StyleYang, Bo, Yao Wu, Weihua Zhang, and Jie Bao. 2020. "Modeling Collision Probability on Freeway: Accounting for Different Types and Severities in Various LOS" Sustainability 12, no. 18: 7386. https://doi.org/10.3390/su12187386
APA StyleYang, B., Wu, Y., Zhang, W., & Bao, J. (2020). Modeling Collision Probability on Freeway: Accounting for Different Types and Severities in Various LOS. Sustainability, 12(18), 7386. https://doi.org/10.3390/su12187386