Urban Microclimate Canopy: Design, Manufacture, Installation, and Growth Simulation of a Living Architecture Prototype

 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Intention of the Urban Microclimate Canopy (UMCC)
1.2. Context and Methodical Framework
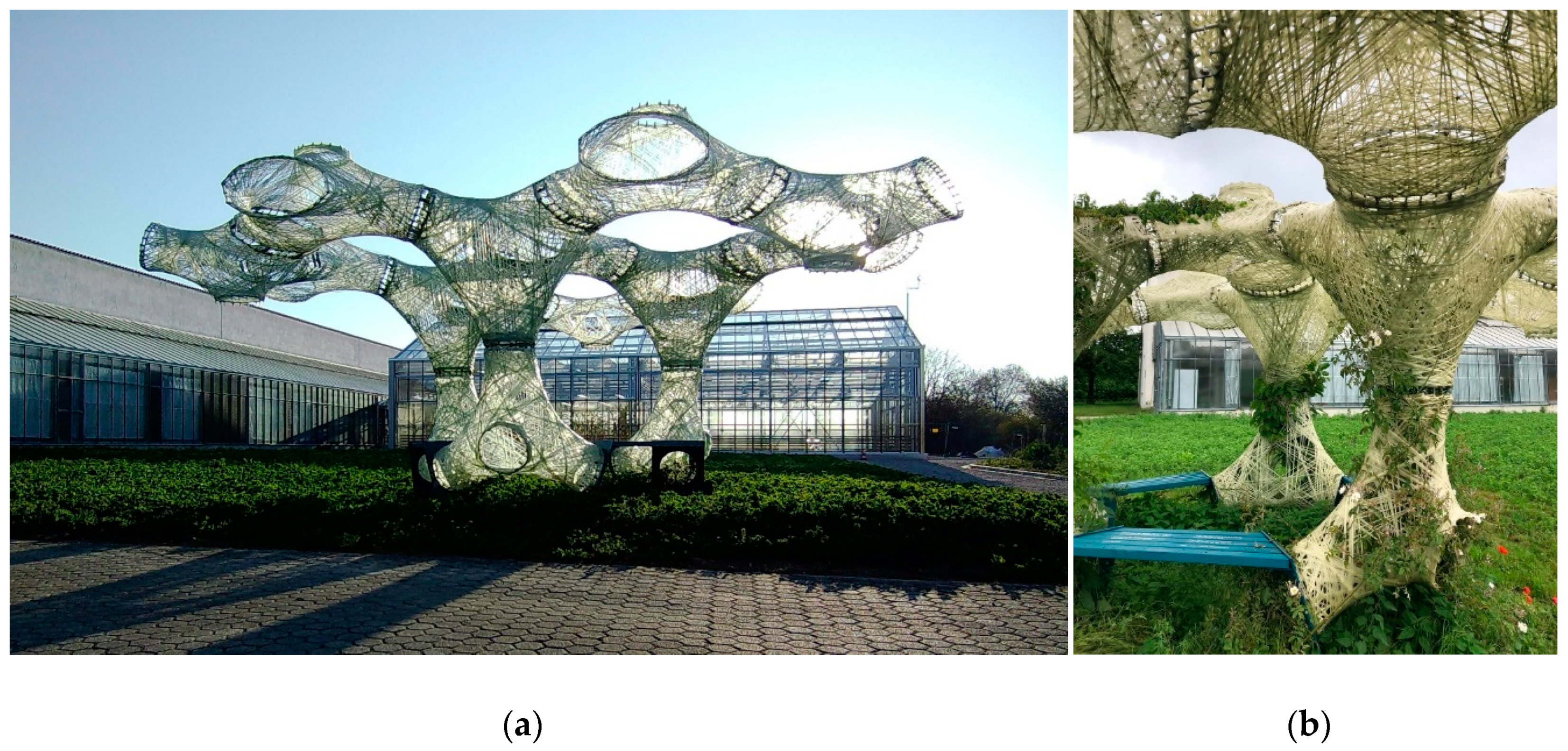
2. Design, Manufacture, and Installation of the UMCC as a Temporary Pavilion
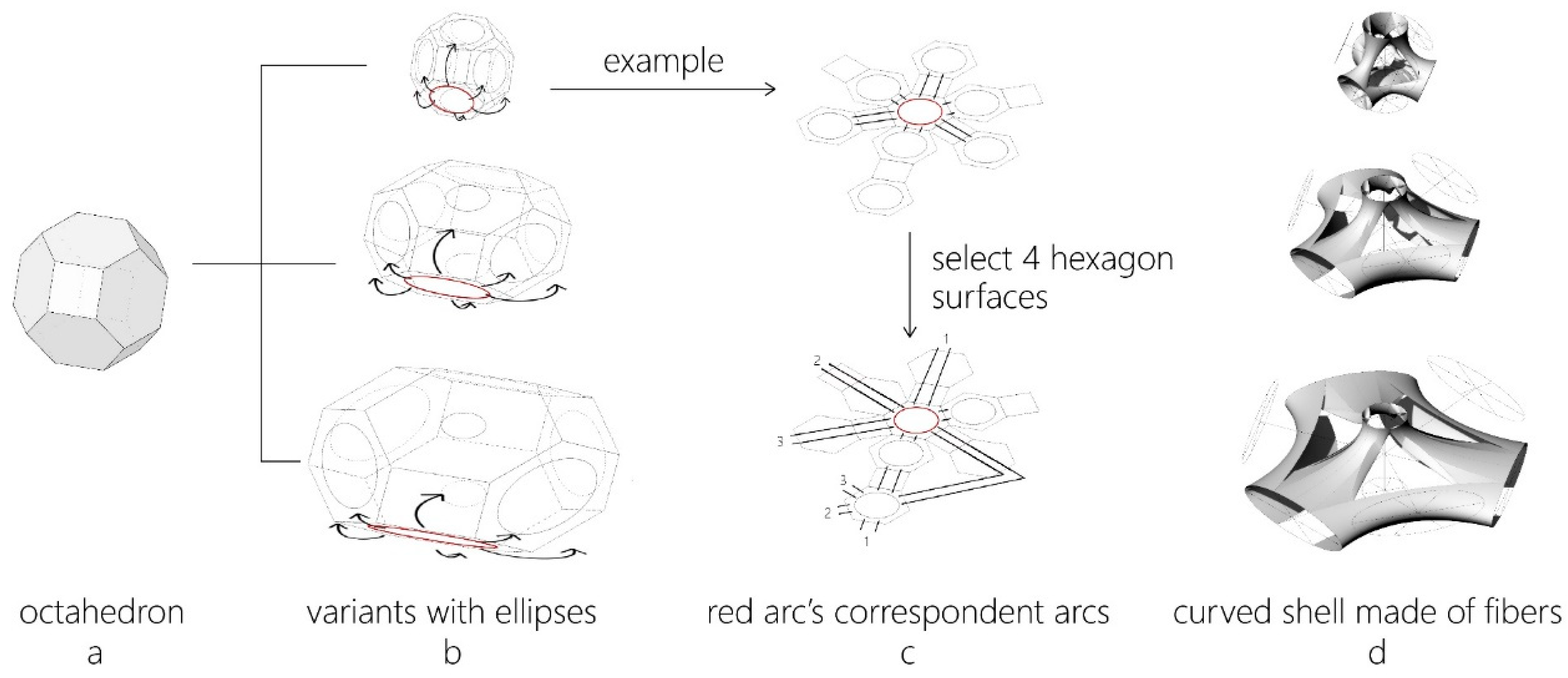
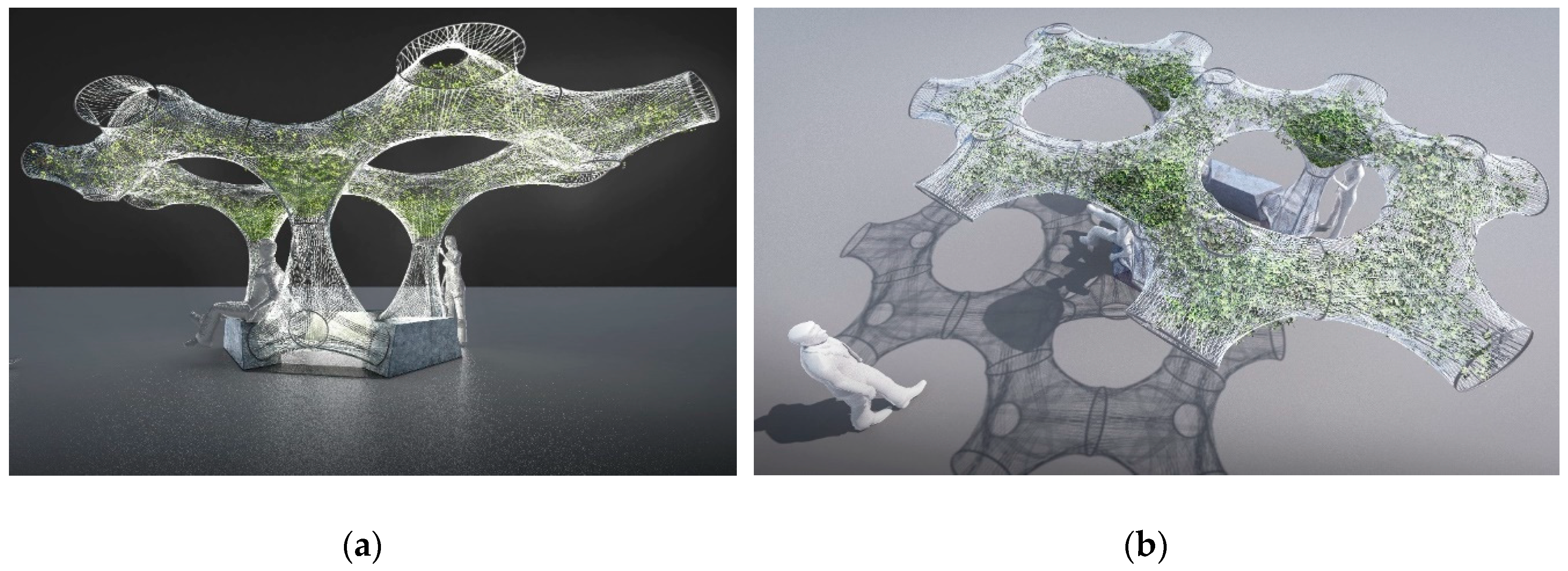
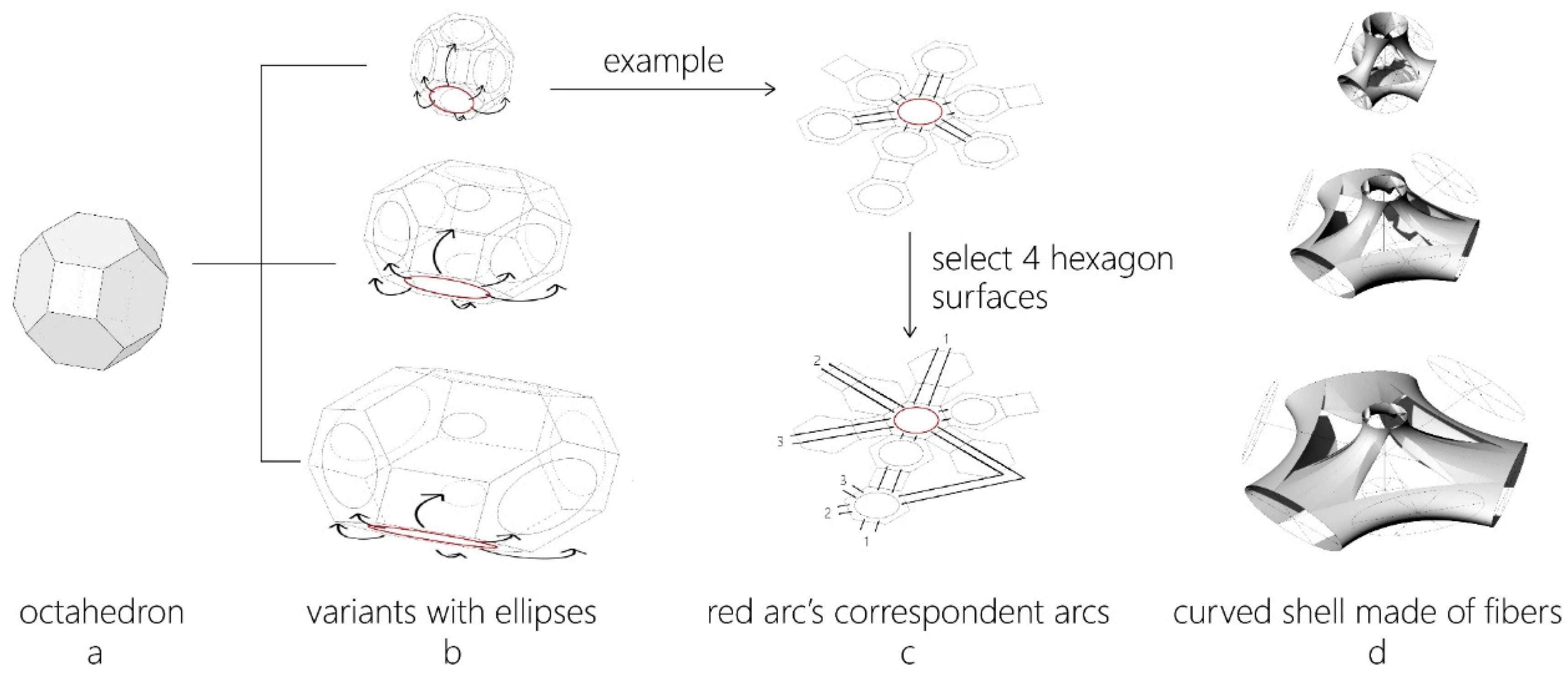
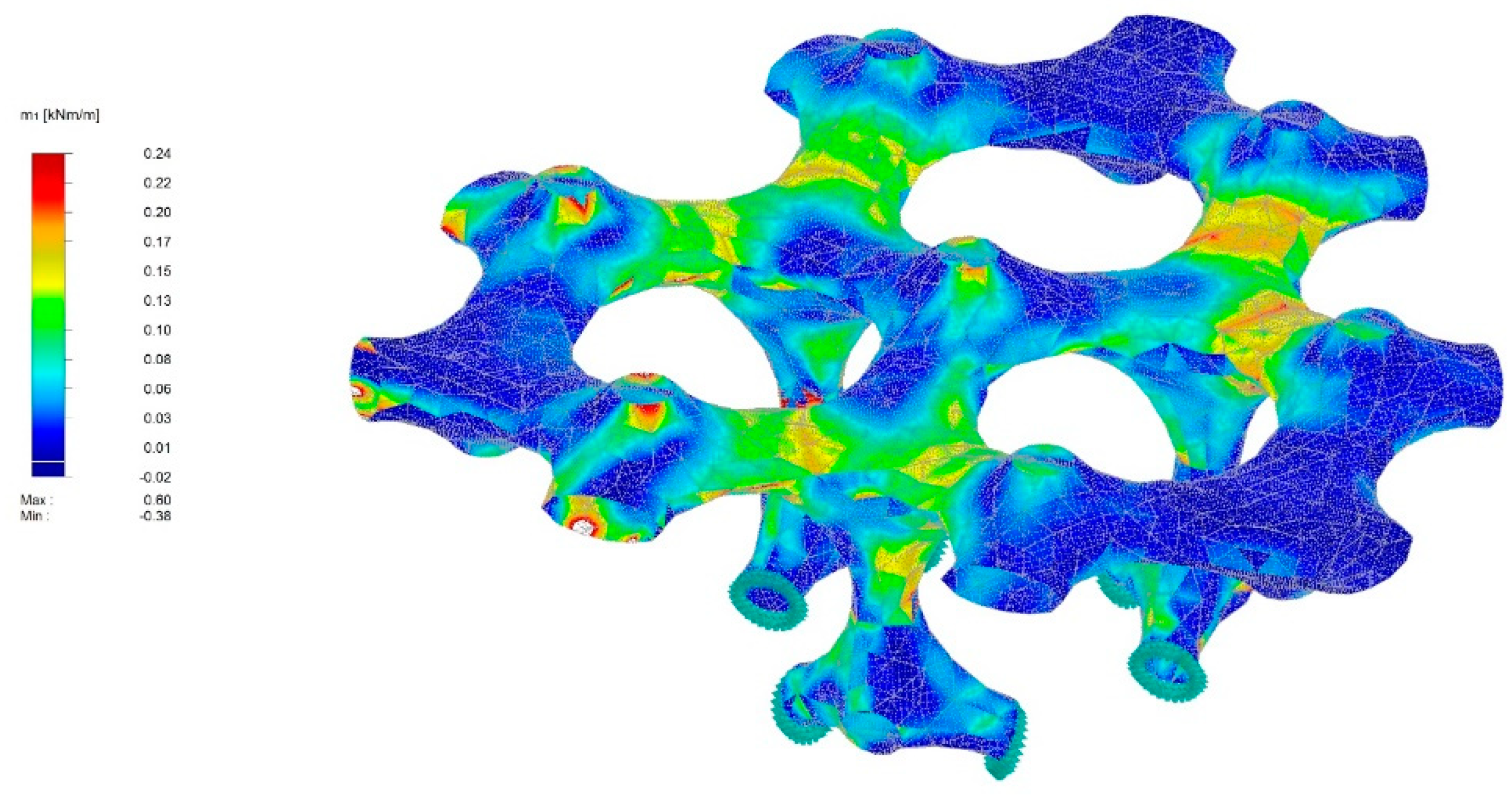
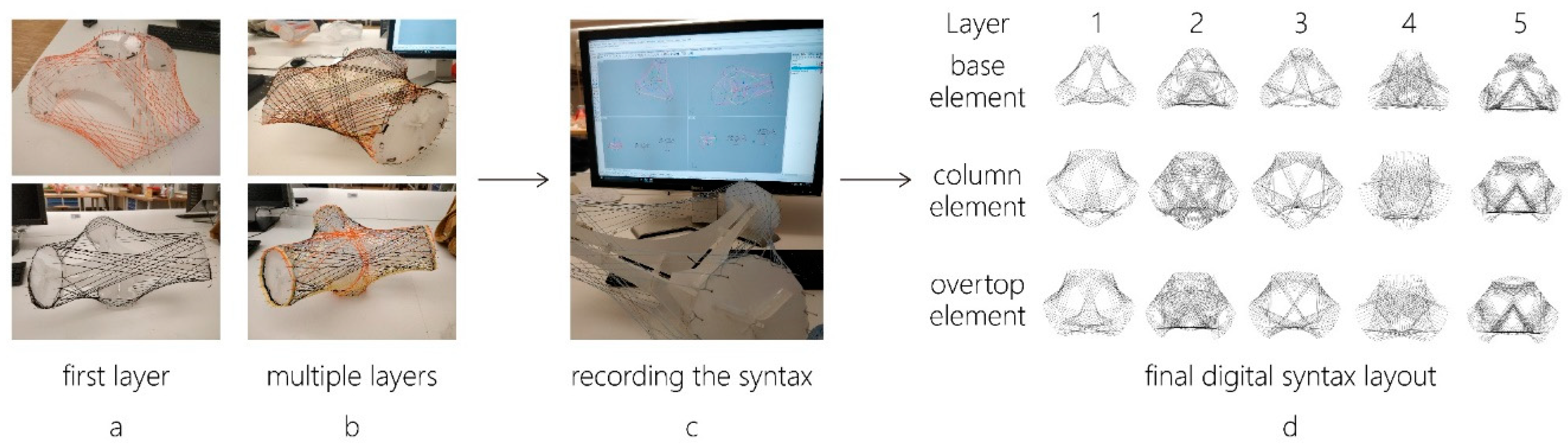
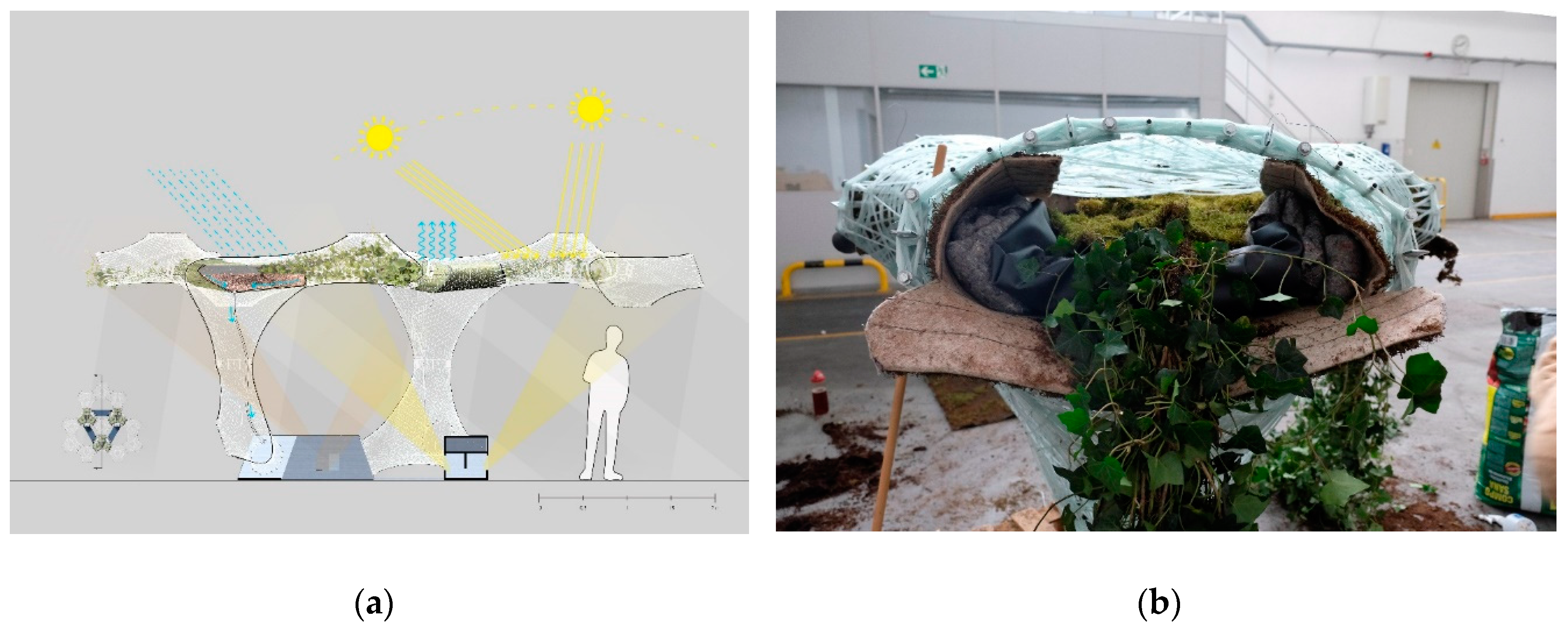
2.1. Concept Development and Design of the Overall Structure
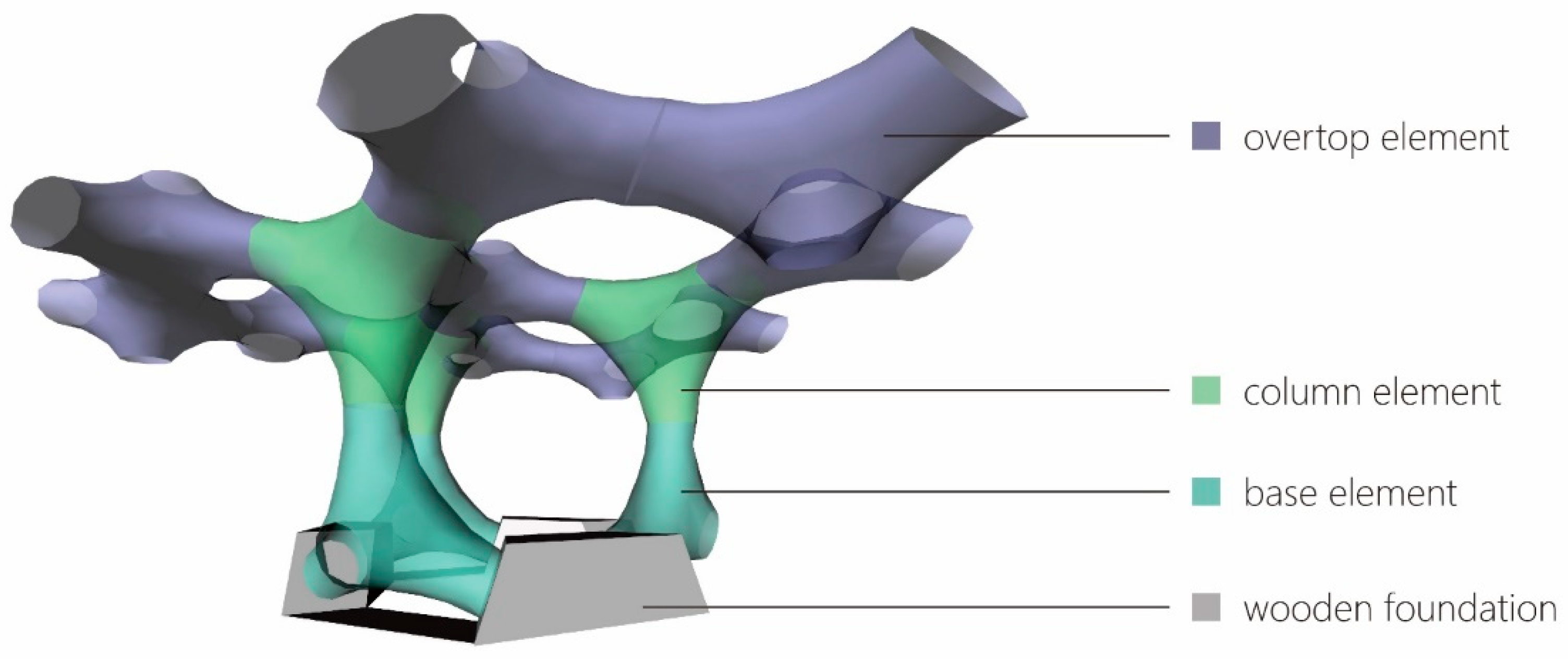
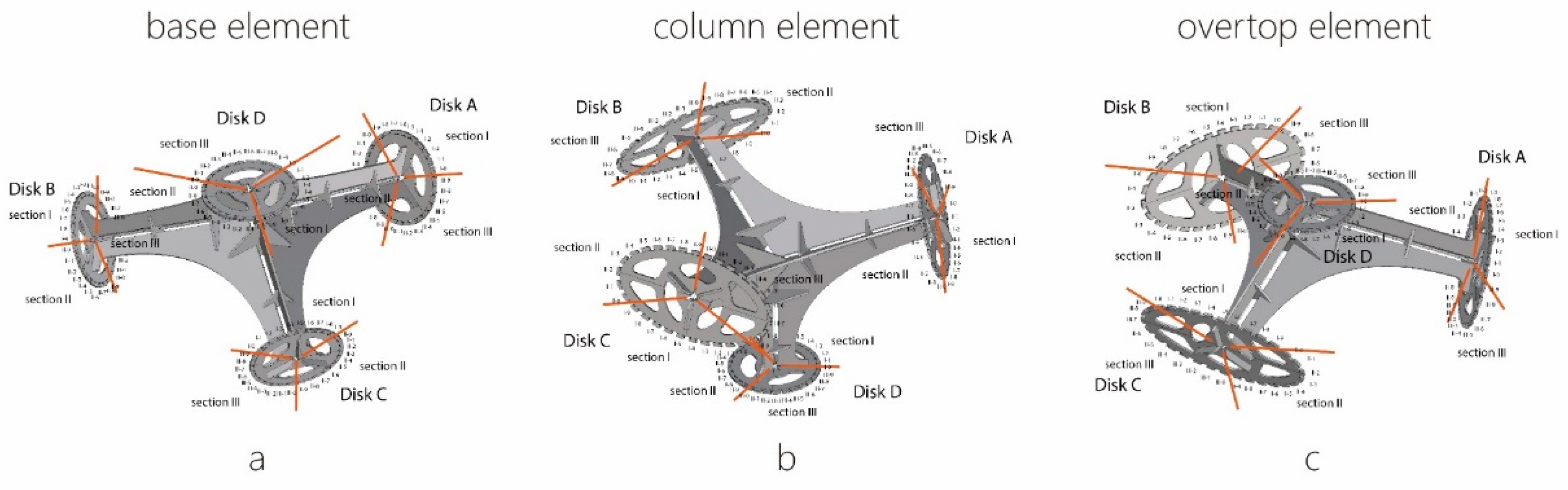
2.2. Design of the Modular Elements
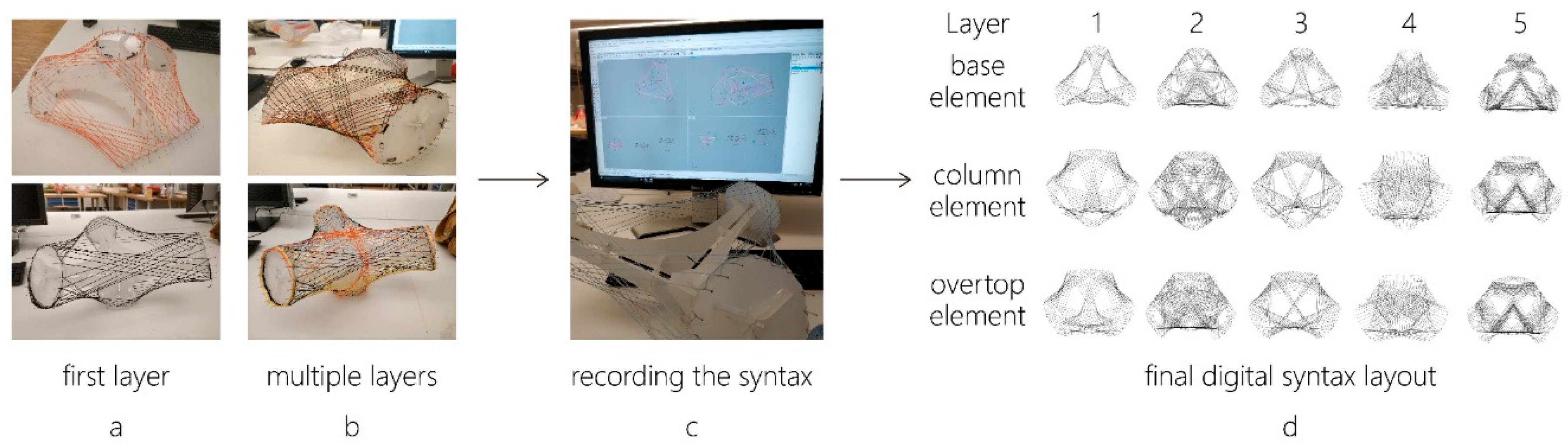
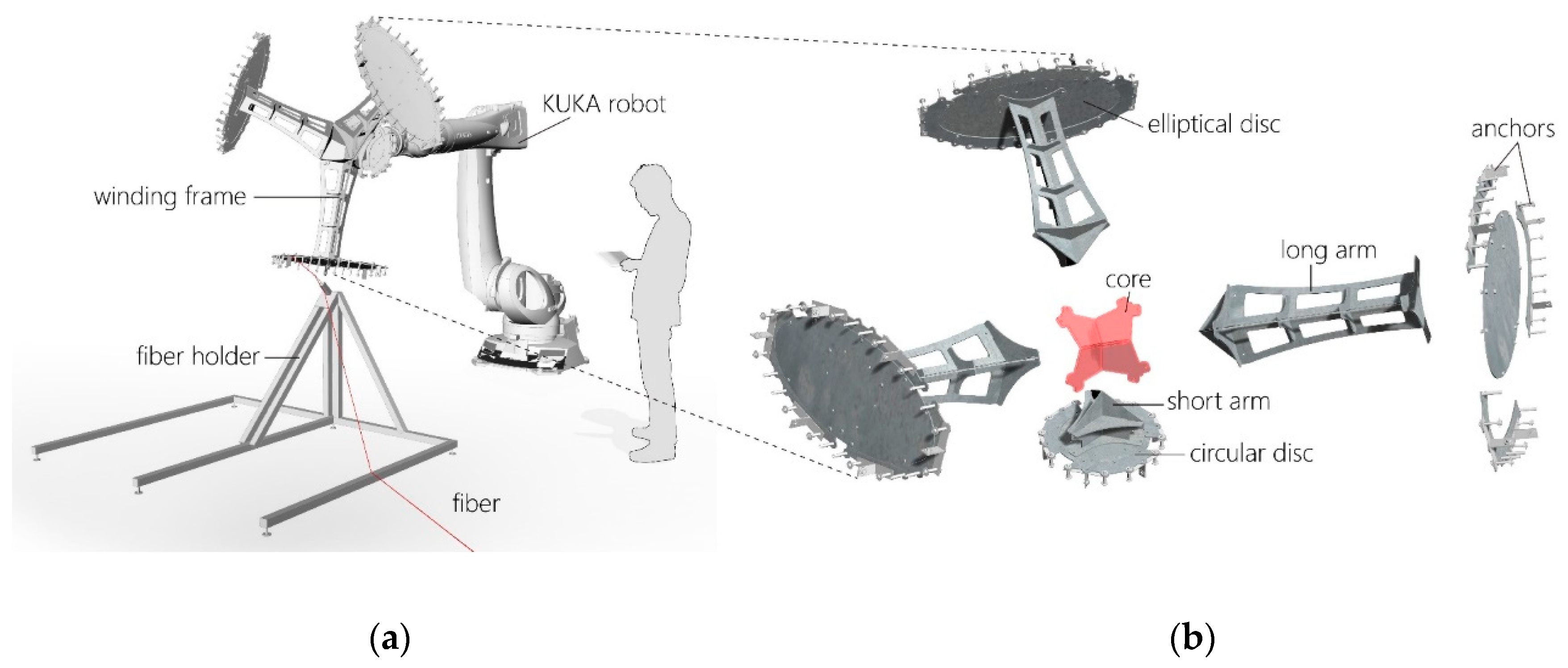
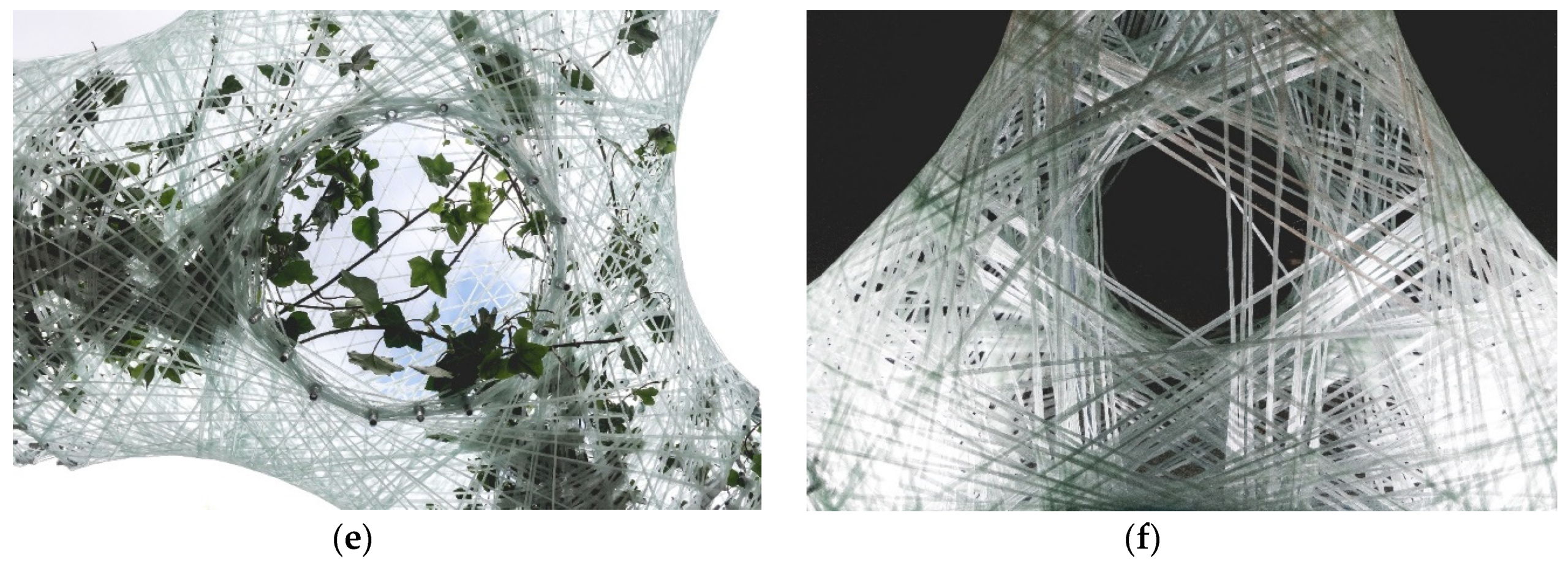
2.3. Development of the Winding Frames and Manufacturing of the Elements
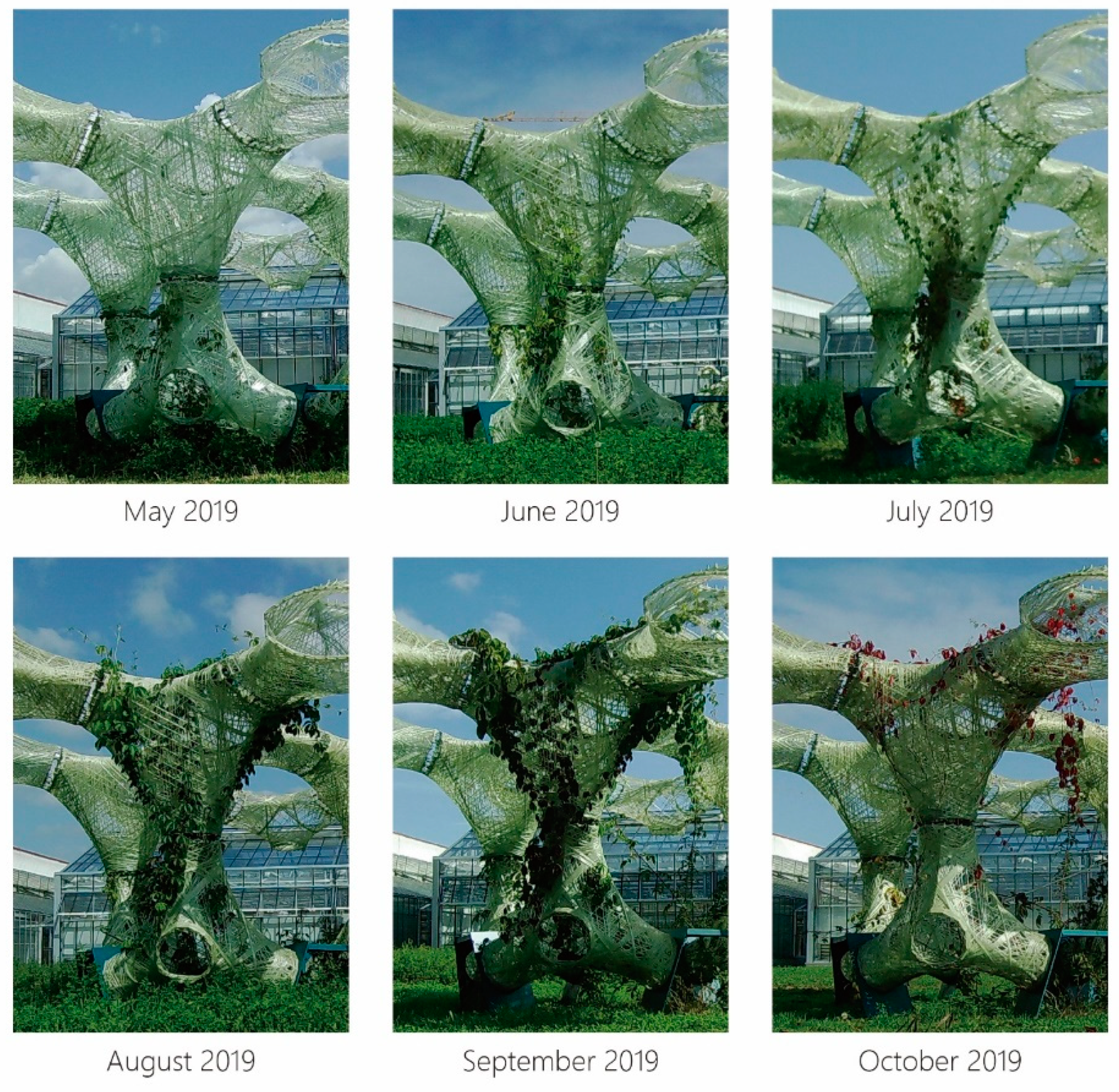
2.4. Planting And Lighting Design for the Temporary Installation
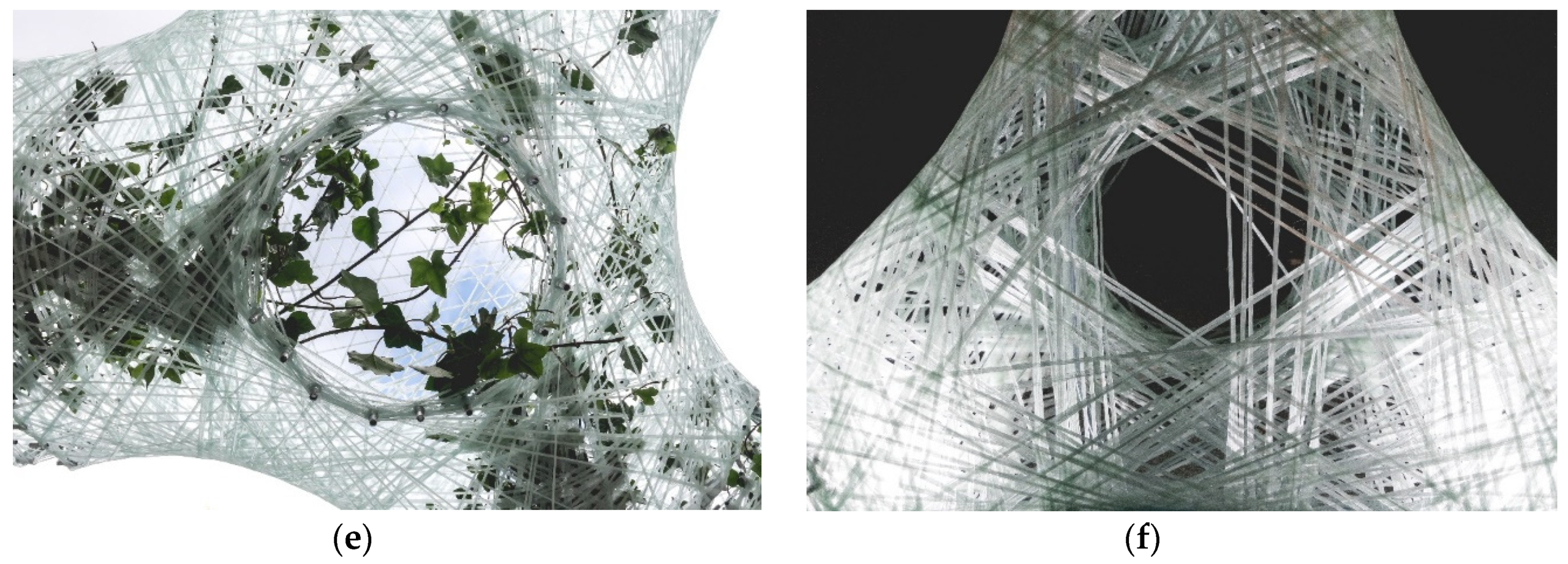
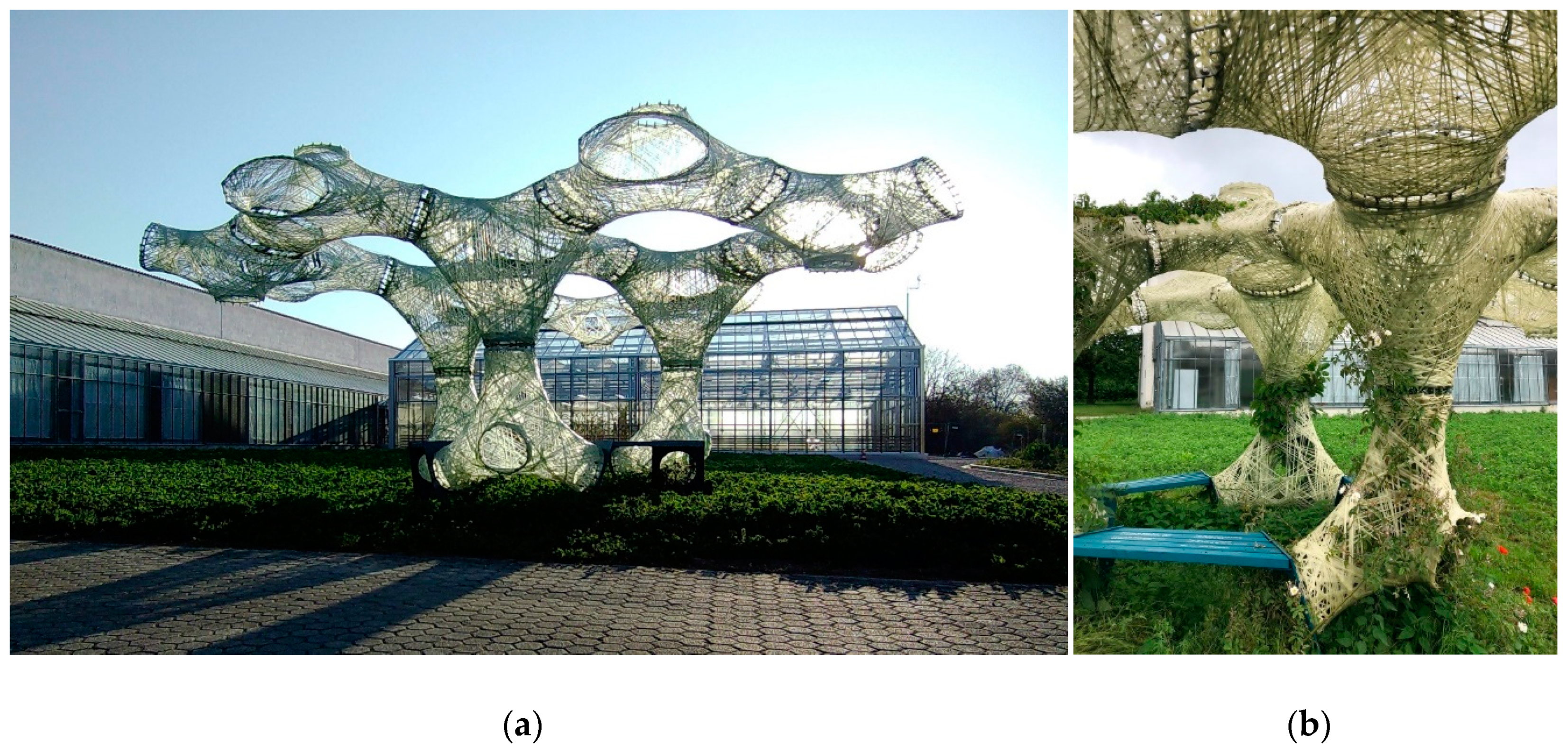
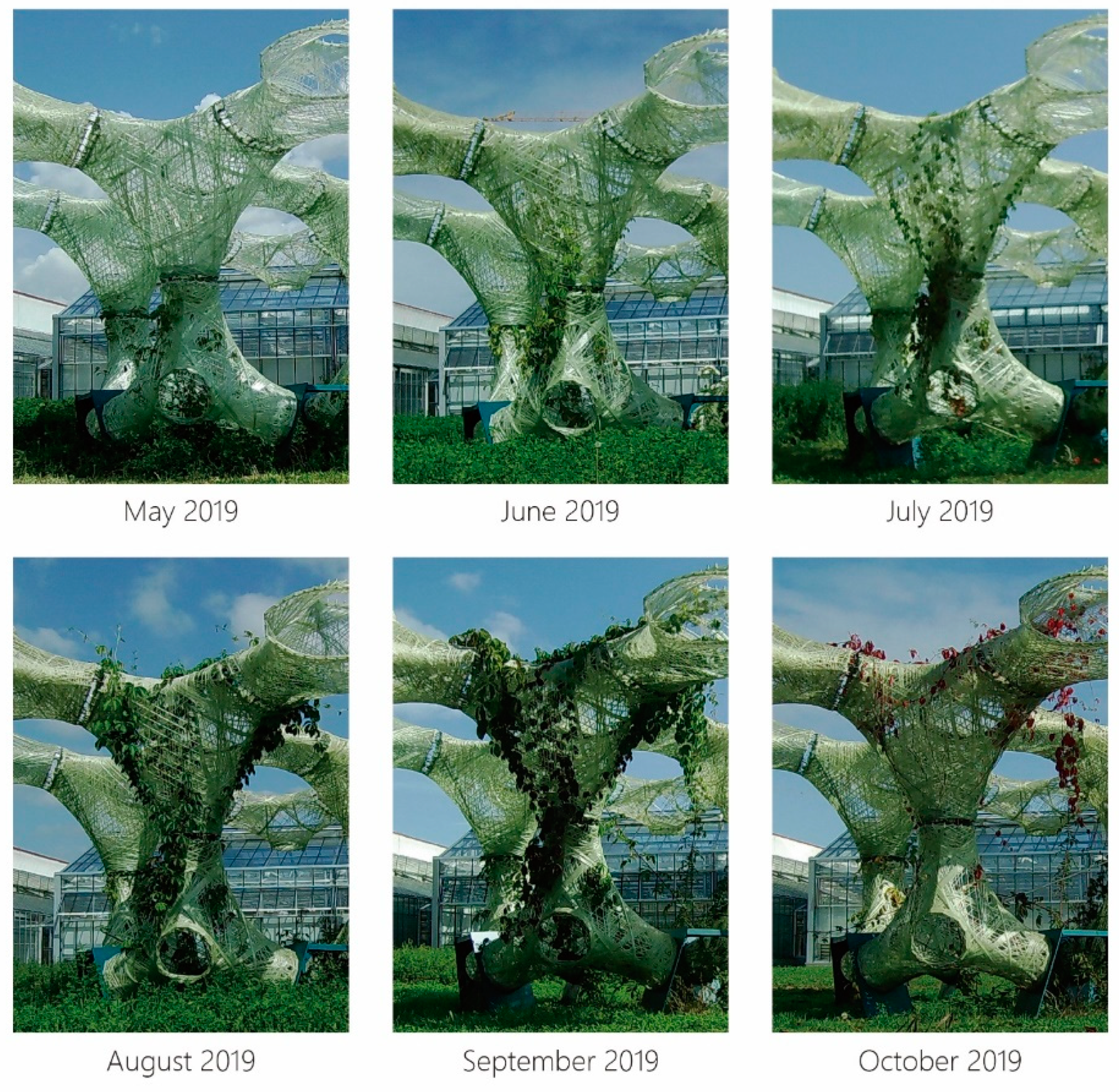
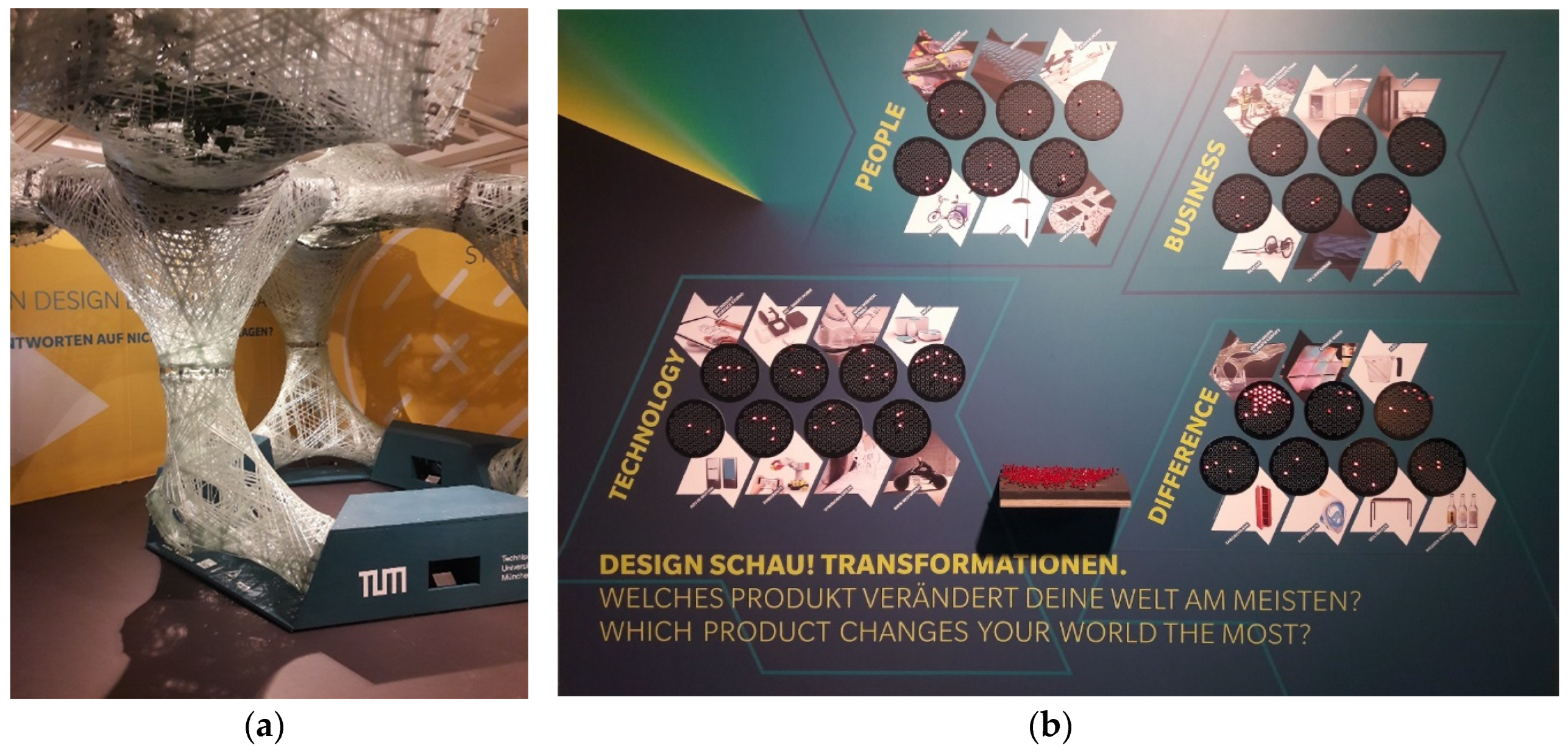
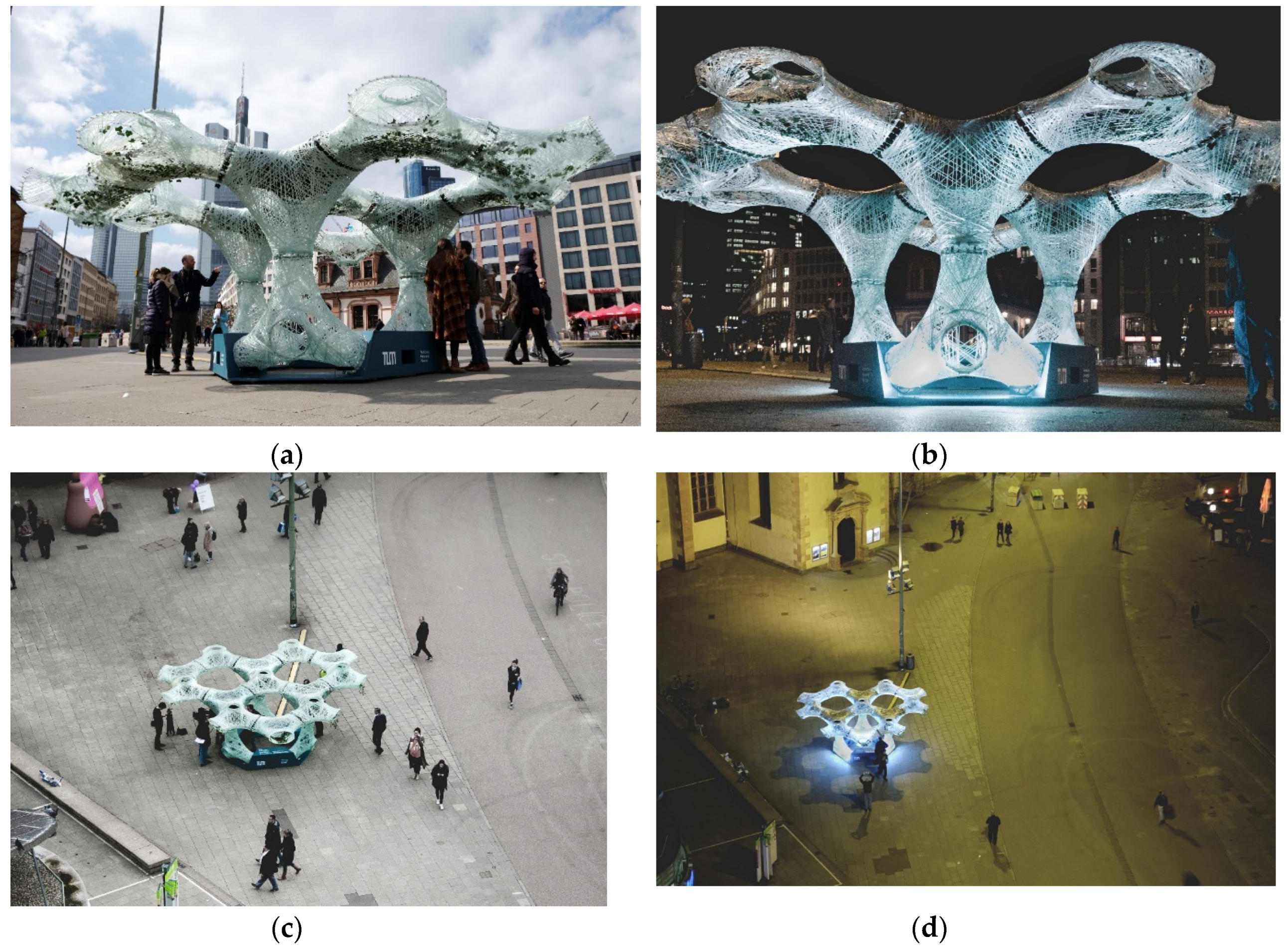
2.5. Temporary Installations and Their Perception
3. Reflection of the Outcome
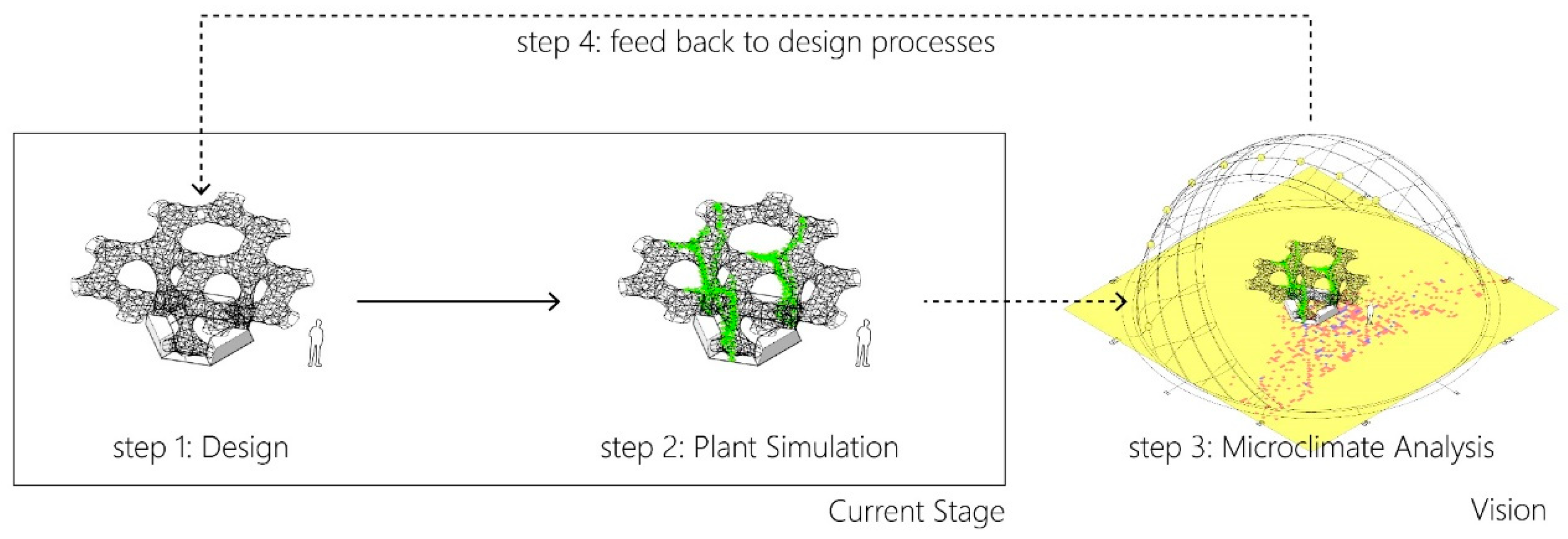
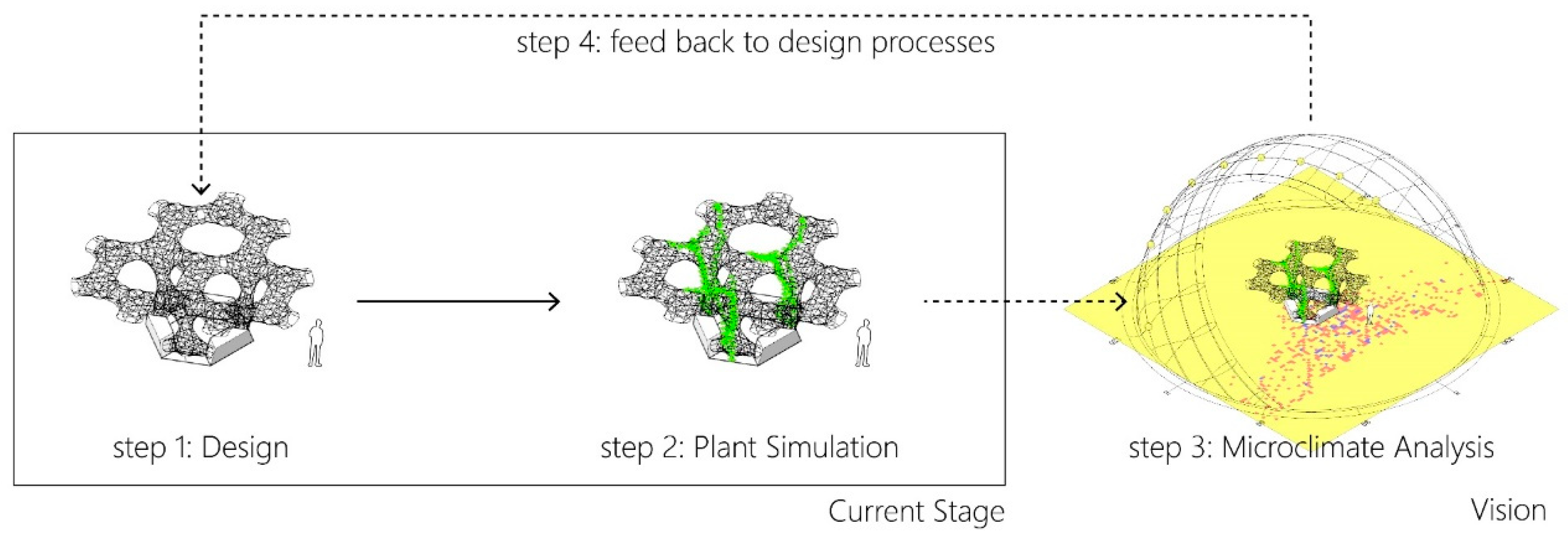
4. Moving towards an Iterative Design Approach
4.1. Prerequisites to Integrate Plant Growth in a Parametric Design Process
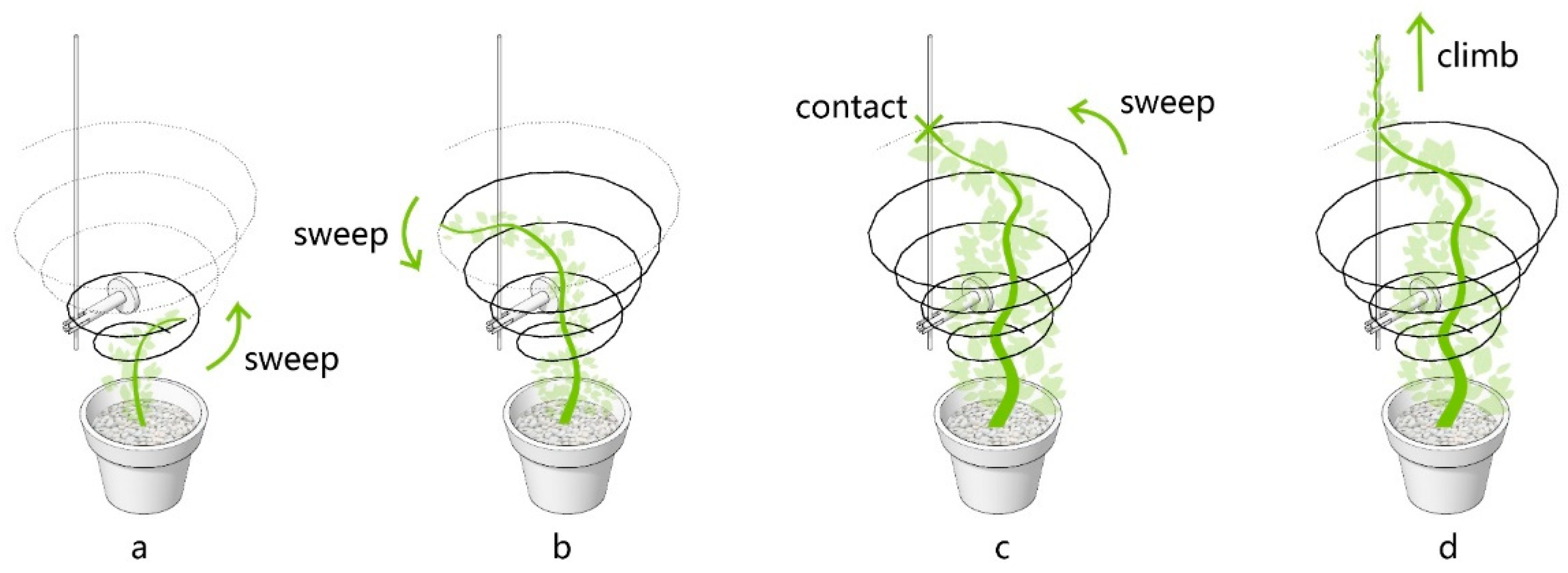
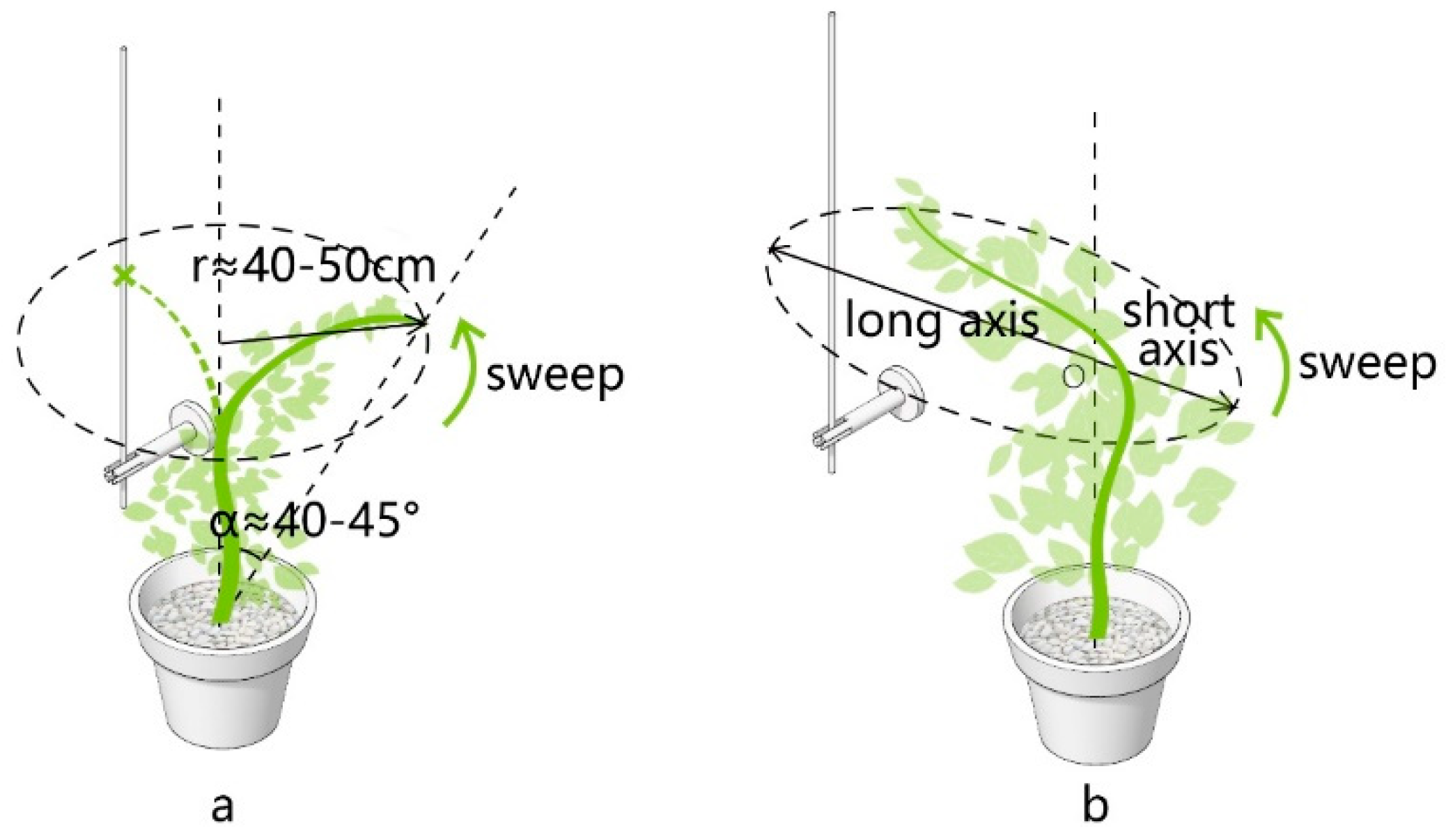
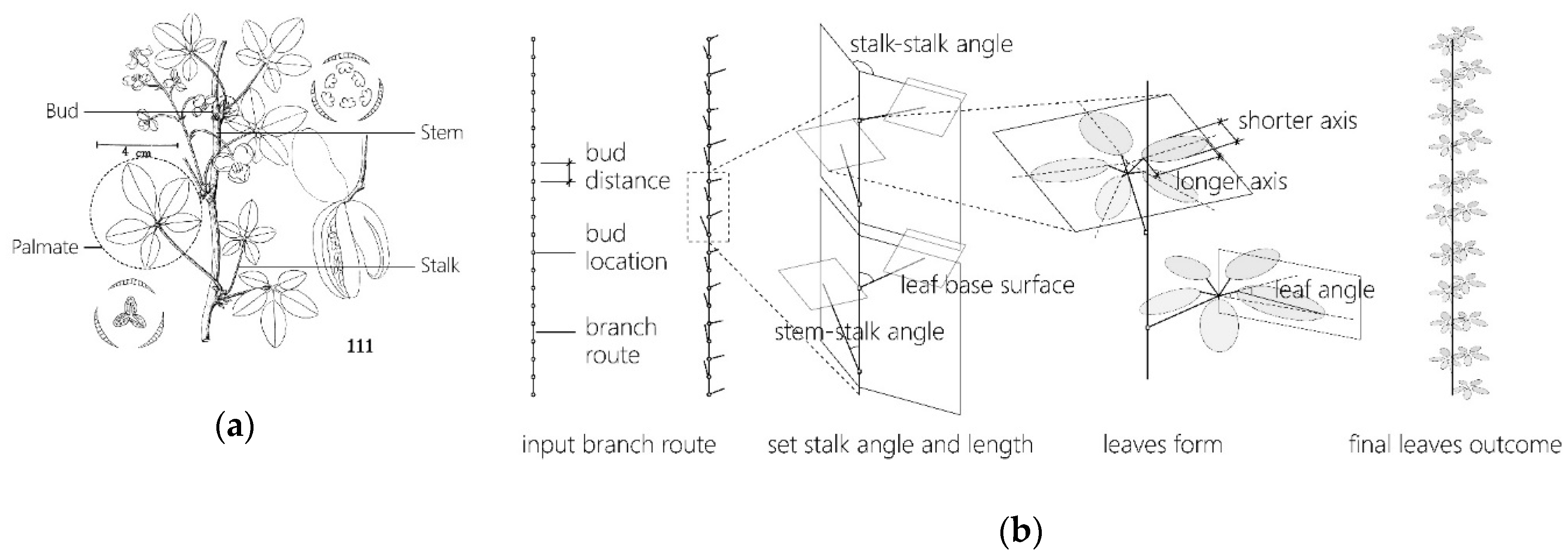
4.2. Physiological and Morphological Basis for this Simulation
- (1)
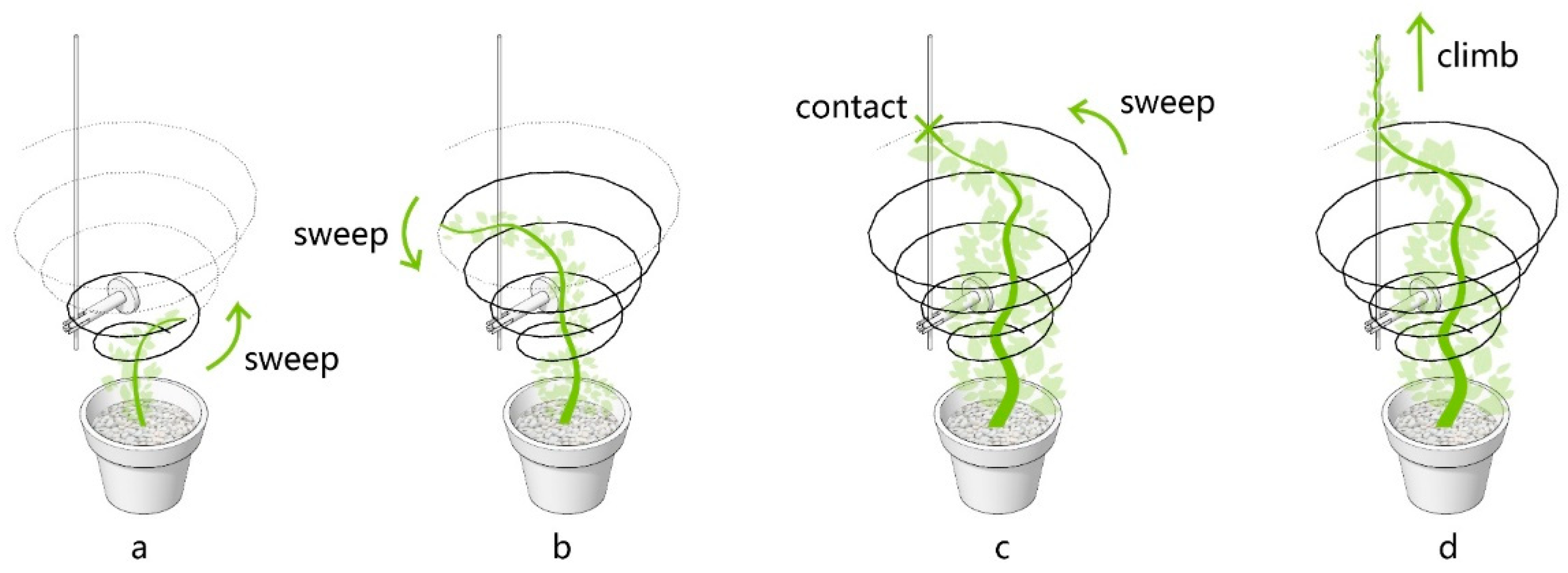
- The species considered must be a twining plant that uses searching shoots to find support;
- (2)
- Soil conditions including water, nutrition, and gas exchange are in idealized condition, not affecting the plant’ s performance;
- (3)
- The growing process requires support systems; stems cannot stand on their own;
- (4)
- Stems overlain on the same supporting locations or on previous stems are excluded;
- (5)
- No wind effects on the circumnutating movement are considered;
- (6)
- No plant diseases or extreme weather events that could interrupt the growth process are considered.
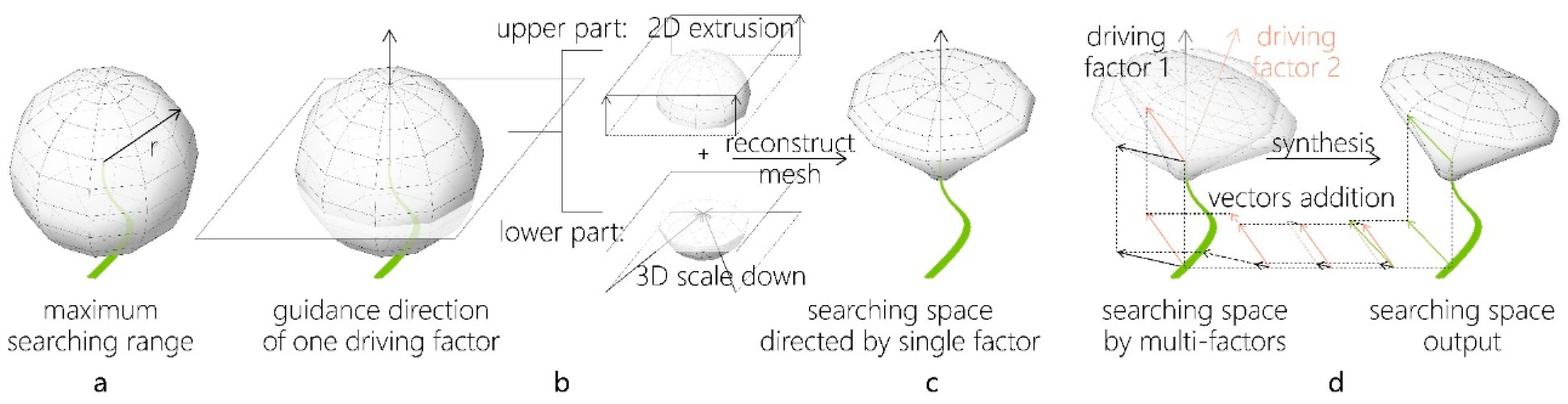
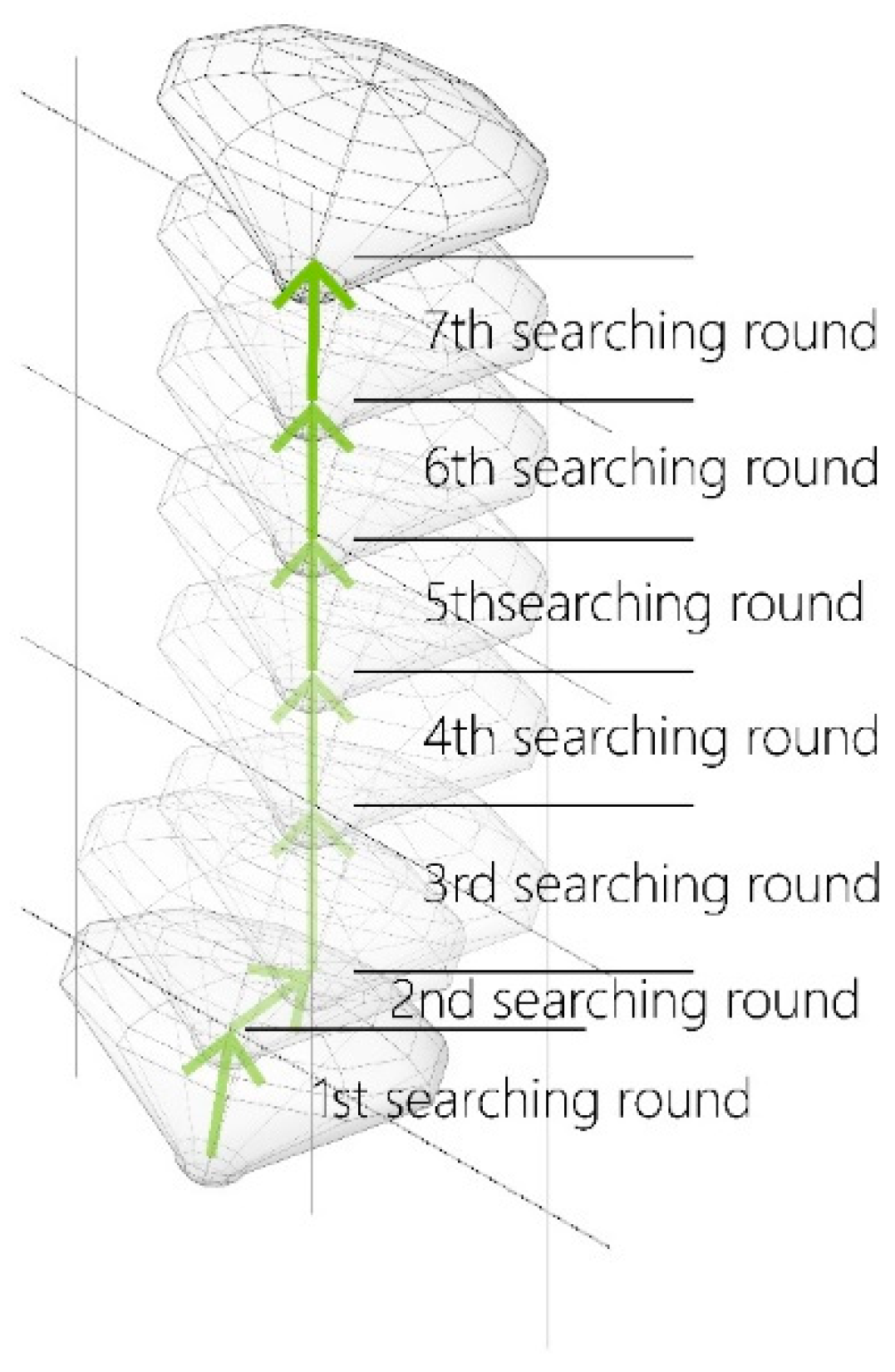
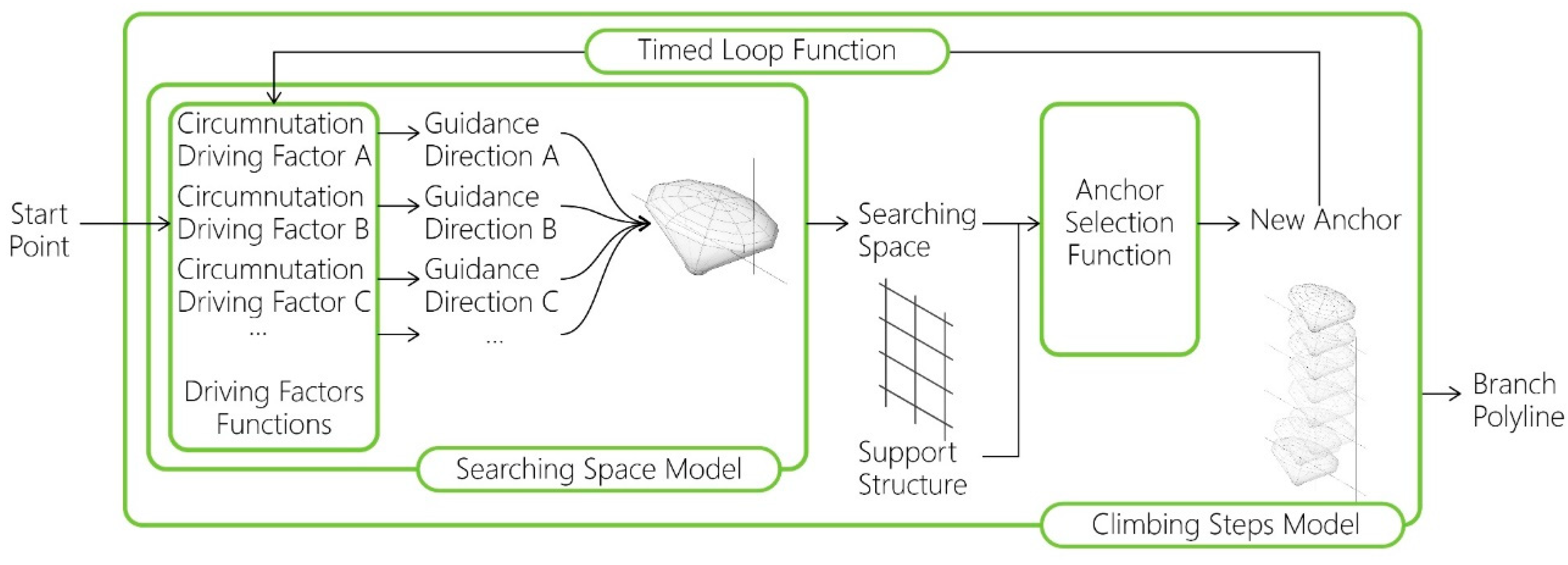
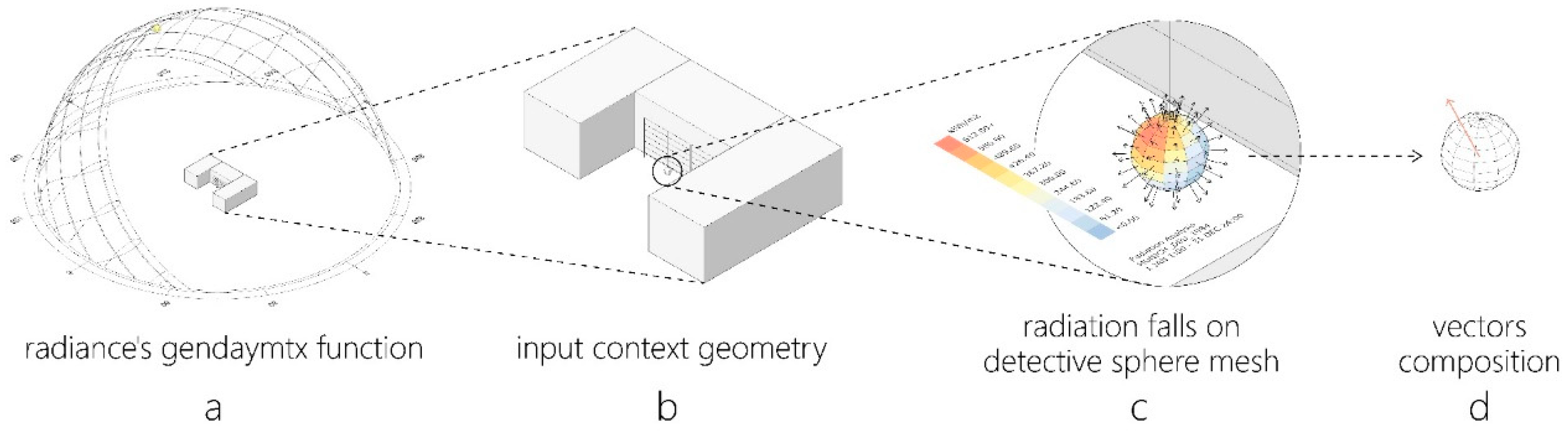
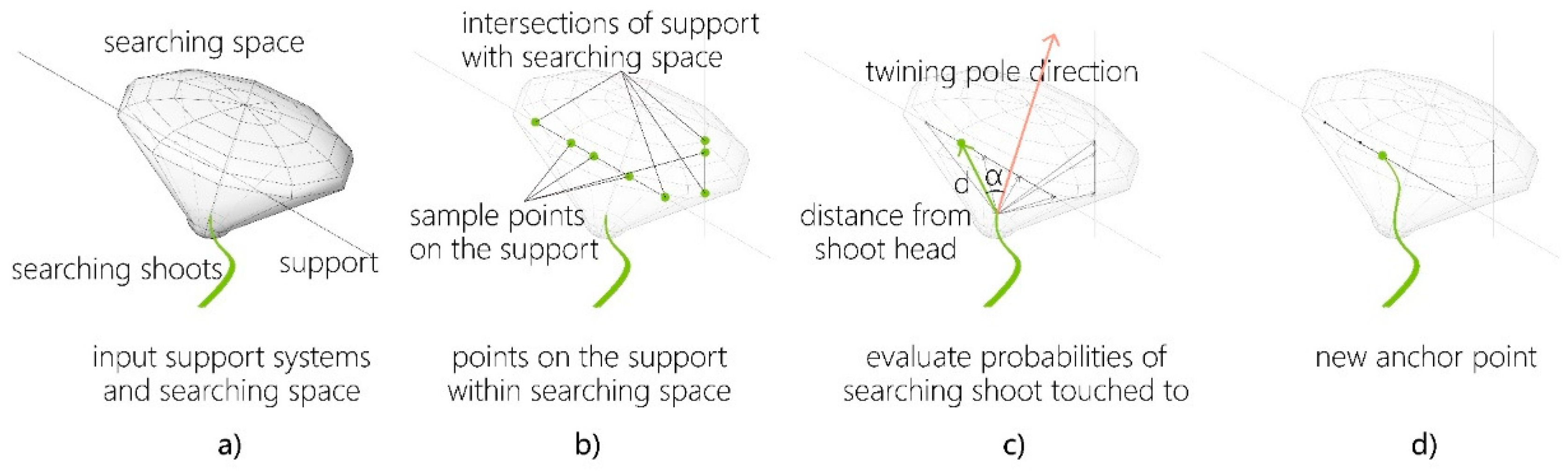
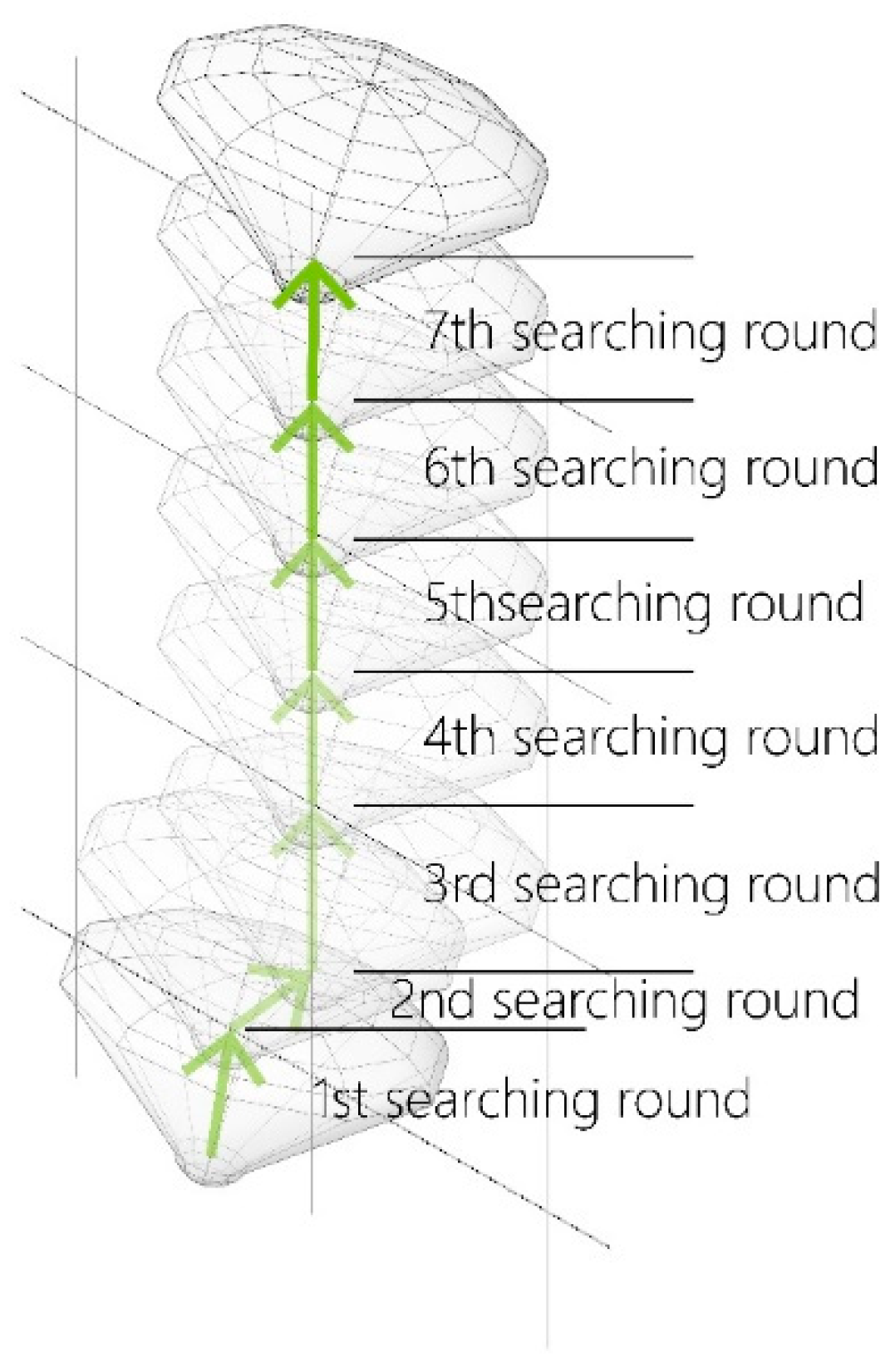
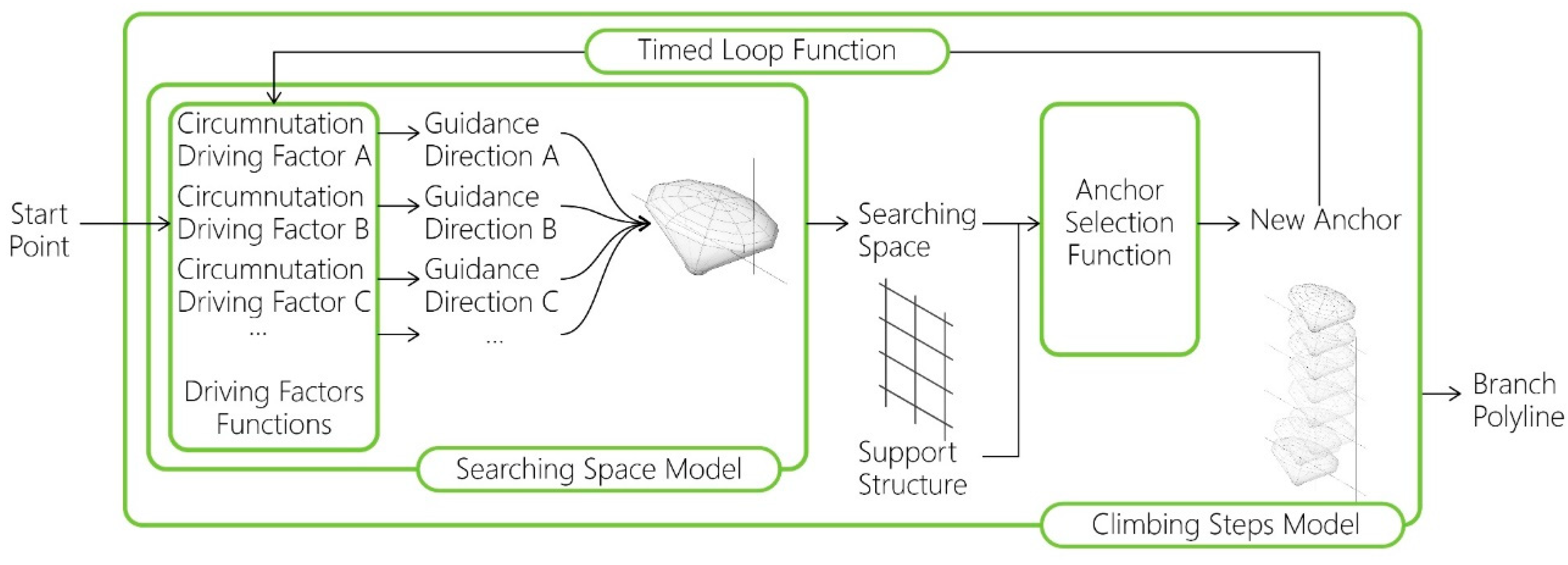
4.3. Core Models of the Simulating Process
4.4. Simulating Framework and Additional Functions
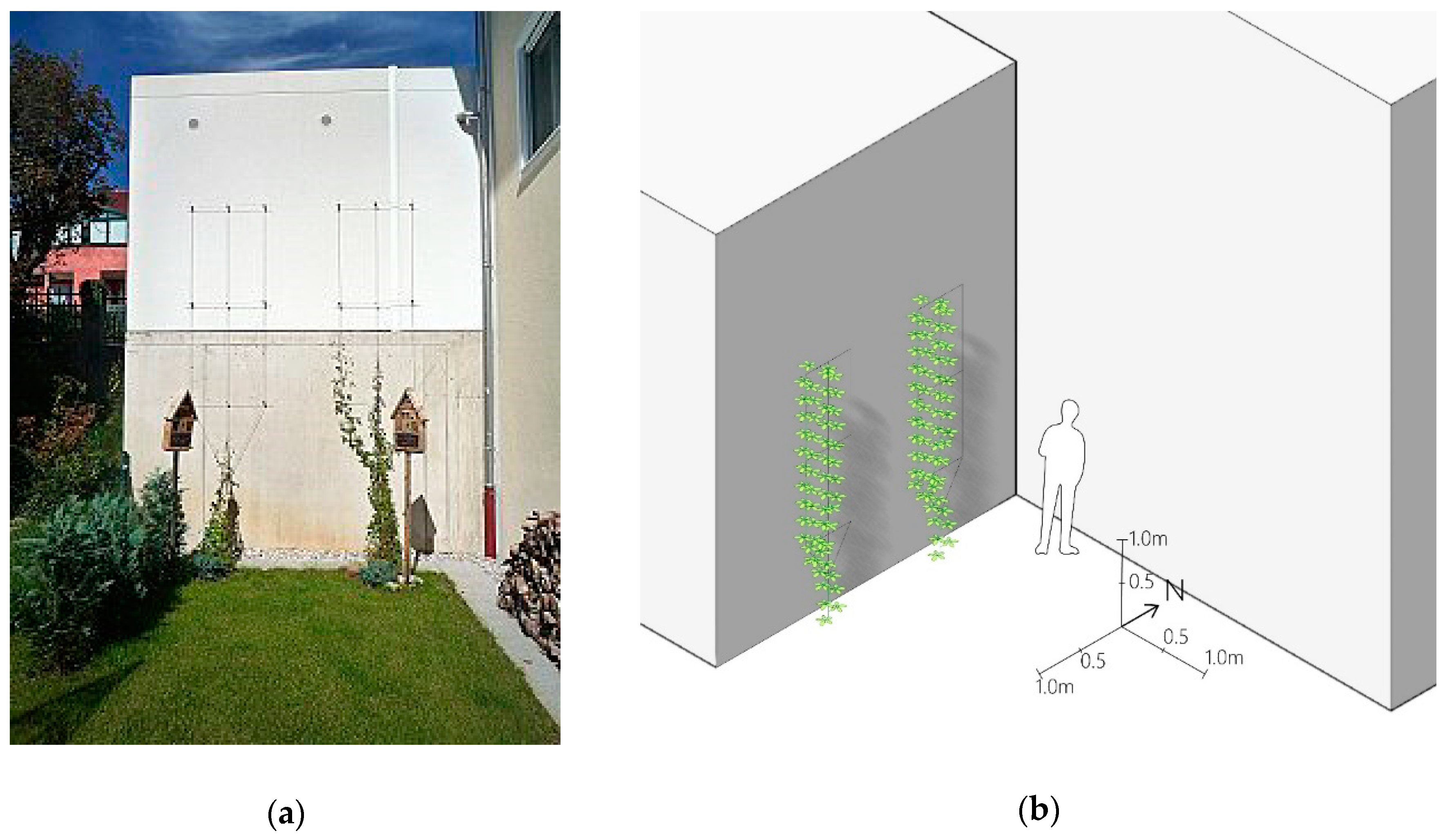
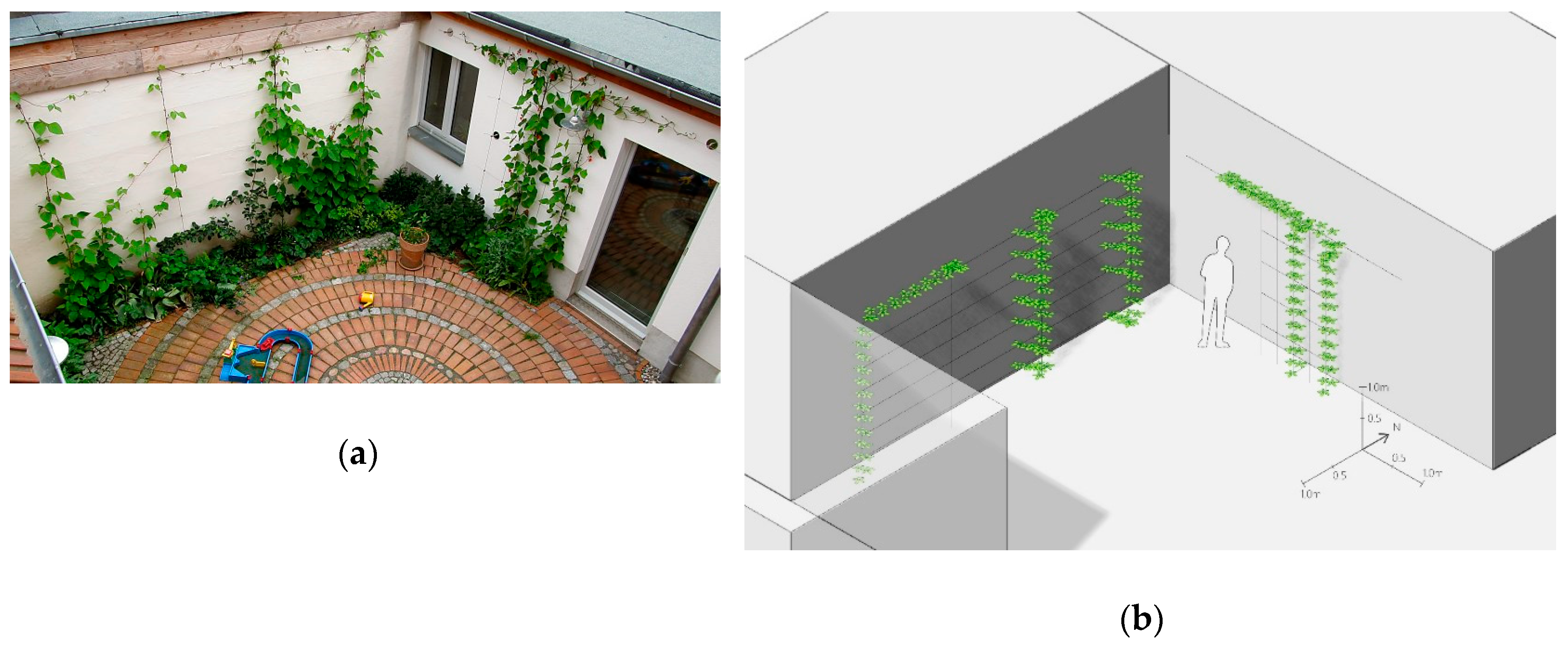
4.5. Plausibility Test of the Simulation Approach Using Case Studies
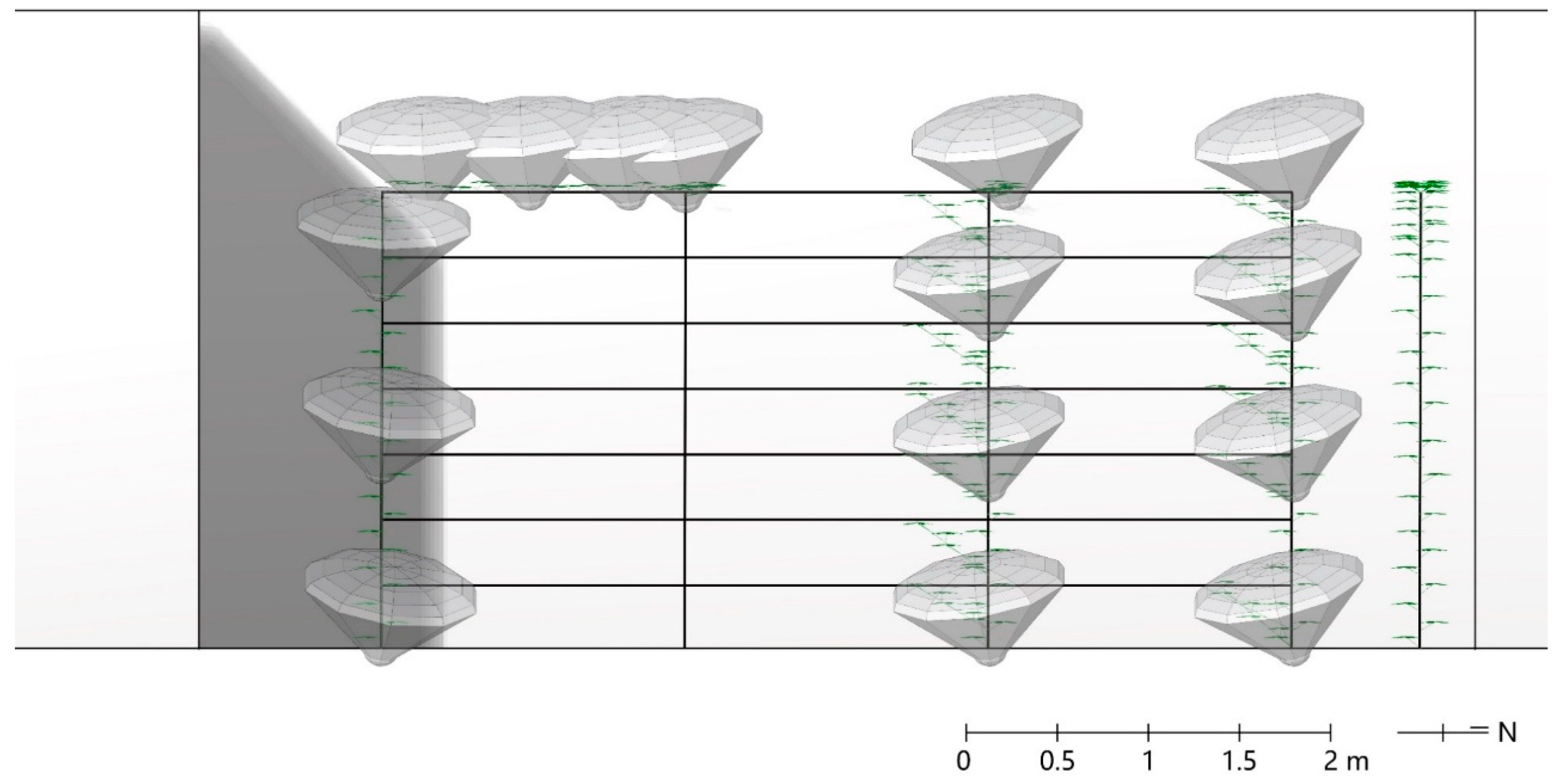
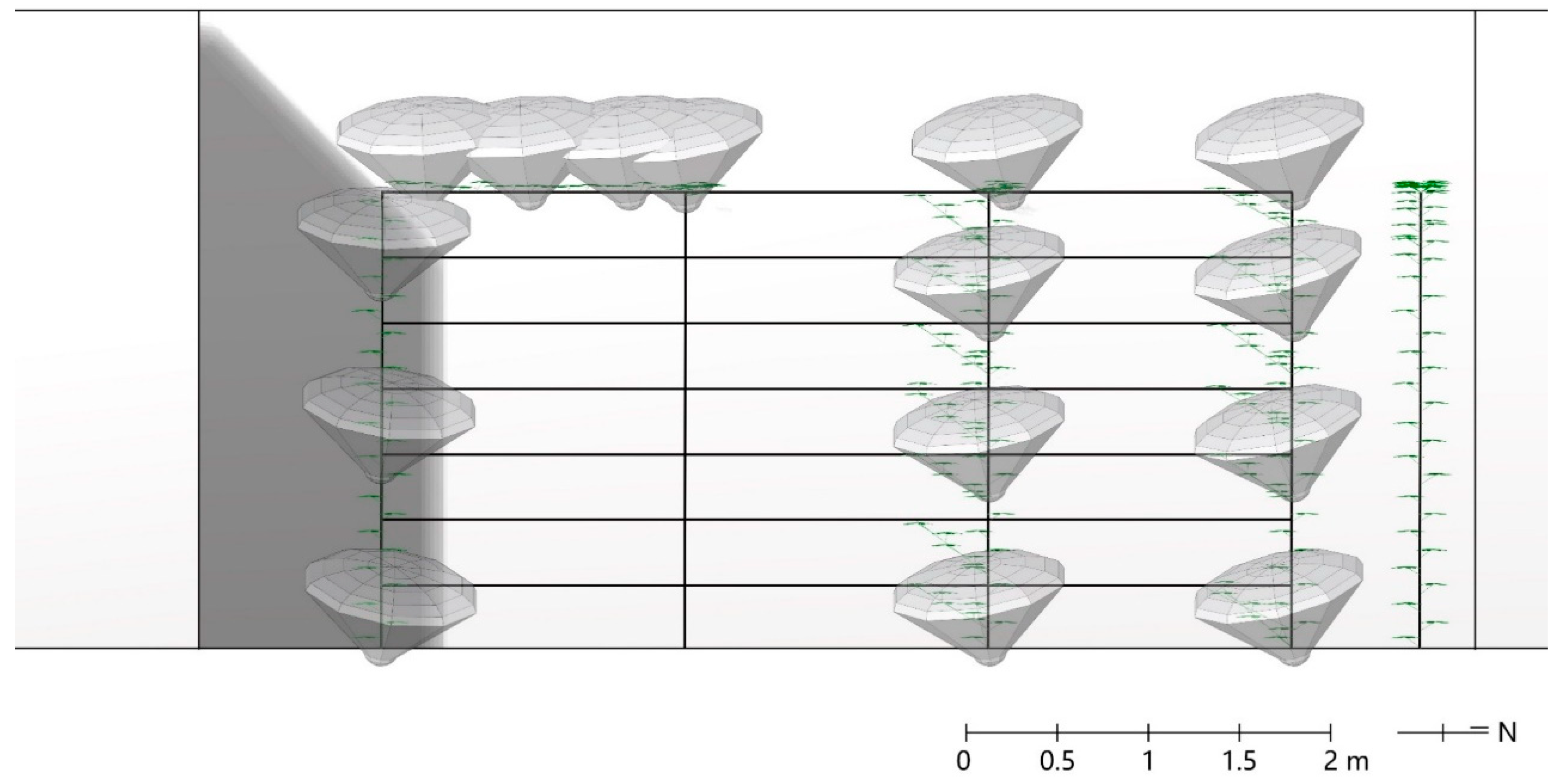
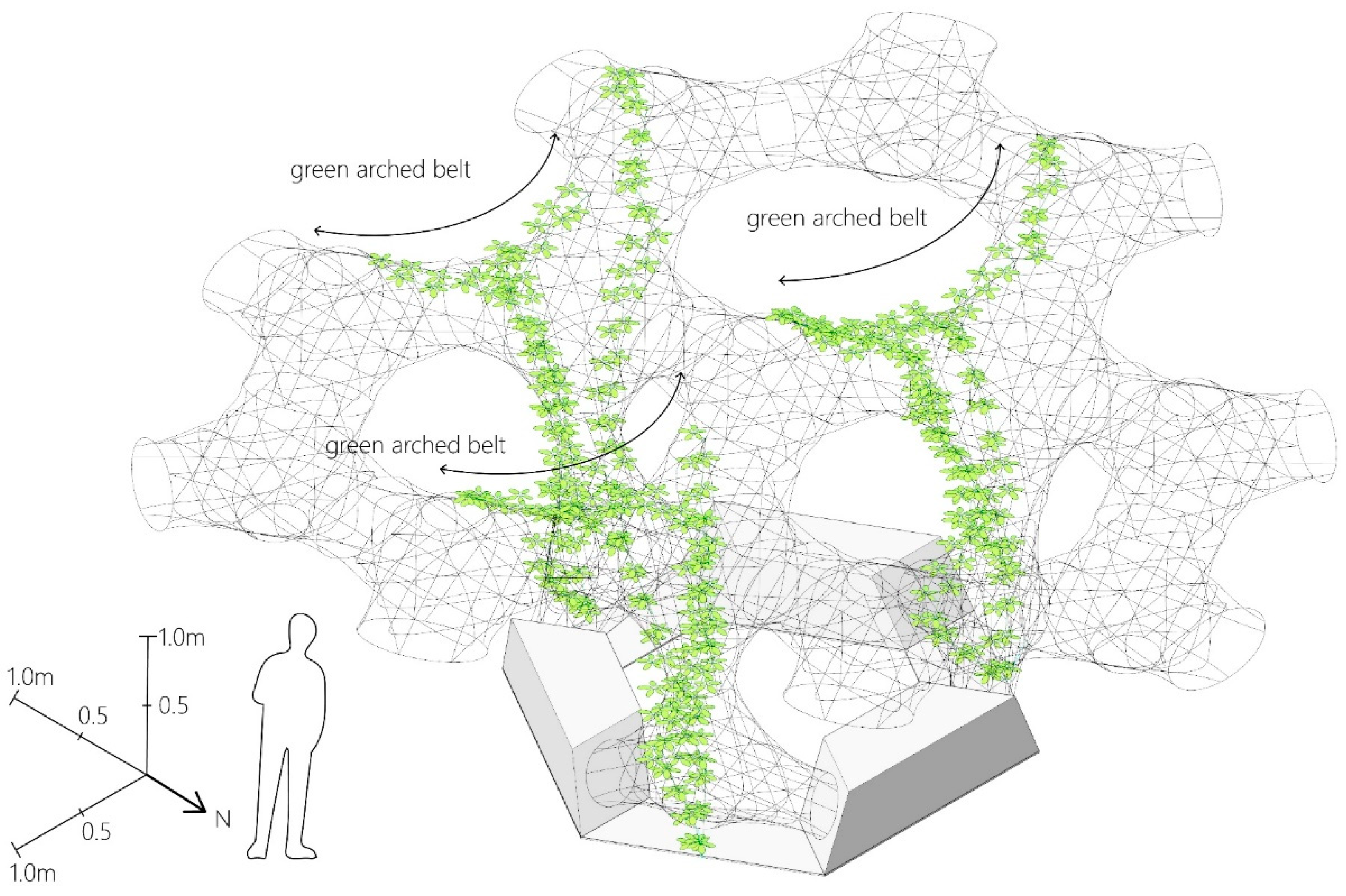
4.6. Growth Simulation on the UMCC
5. Redesign and Setup as a Long-Term Experiment
6. Discussion and Conclusion
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Block, A.H.; Livesley, S.J.; Williams, N.S. Responding to the Urban Heat Island: A Review of the Potential of Green Infrastructure; Victorian Centre forClimate Change Adaptation Research: Melbourne, VIC, Australia, 2012. [Google Scholar]
- Köhler, M. Green Facades—A View Back and Some Visions. In Urban Ecosystems; Springer: Berlin/Heidelberg, Germany, 2008; Volume 11, p. 423. [Google Scholar]
- Wong, N.H.; Tan, A.Y.K.; Chen, Y.; Sekar, K.; Tan, P.Y.; Chan, D.; Chiang, K.; Wong, N.C. Thermal evaluation of vertical greenery systems for building walls. In Building and Environment; Elsevier: Amsterdam, The Netherlands, 2010; Volume 45, pp. 663–672. [Google Scholar]
- Köhler, M.; Ansel, W.; Appl, R.; Mann, G.; Ottelé, M.; Betzler, F.; Wünschmann, S. Handbuch Bauwerksbegrünung: Planung-Konstruktion-Ausführung; Rudolf Müller: Cologne, Germany, 2012. [Google Scholar]
- Brandwein, T. Bessere Kletterhilfen für Bessere Fassadenbegrünungen. Neue Landsch. 2012, 11, 30. [Google Scholar]
- Blanc, P. Vertical Gardens; WW Norton & Company: New York, NY, USA, 2012. [Google Scholar]
- Hindle, R.L. A Vertical Garden: Origins of the Vegetation-Bearing Architectonic Structure and System (1938). Stud. Hist. Gard. Des. Landscapes 2012, 32, 99–110. [Google Scholar] [CrossRef]
- Pfoser, N.; Jenner, N.; Henrich, J.; Heusinger, J.; Weber, S.; Schreiner, J. Gebäude Begrünung Energie: Potenziale und Wechselwirkungen; Bundesministeriums für Verkehr, Ed.; Technische Universität Darmstadt Technische Universität Braunschweig: Braunschweig, Germany, 2013. [Google Scholar]
- Prado, M.; Dörstelmann, M.; Schwinn, T.; Menges, A.; Knippers, J. Core-less filament winding. In Robotic Fabrication in Architecture, Art and Design 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 275–289. [Google Scholar]
- Milburn, L.-A.S.; Brown, R.D. The relationship between research and design in landscape architecture. Landsc. Urban Plan. 2003, 64, 47–66. [Google Scholar] [CrossRef] [Green Version]
- Nijhuis, S.; Bobbink, I. Design-related research in landscape architecture. J. Des. Res. 2012, 10, 239. [Google Scholar] [CrossRef]
- Otto, F.; IUrukov, I.; Kraichkova, E. Frei Otto; Arterigere: Varese, Italy, 1991. [Google Scholar]
- Dahy, H.; Petrs, J.; Bos, D.H.; Baszynski, P.; Habraken, A.P.; Teuffel, P.M. BioMat Pavilion 2018: Development, Fabrication and Erection of a Double Curved Segmented Shell from Biocomposite Elements. In Proceedings of the International Association for Shell and Spatial Structures (IASS), Barcelona, Spain, 7–10 October 2019. [Google Scholar]
- Hensel, M.; Santucci, D.; Sunguroğlu Hensel, D.; Auer, T. The Lampedusa Studio: A Multimethod Pedagogy for Tackling Compound Sustainability Problems in Architecture, Landscape Architecture, and Urban Design. Sustainability 2020, 12, 4369. [Google Scholar] [CrossRef]
- Parascho, S.; Knippers, J.; Dörstelmann, M.; Prado, M.; Menges, A. Modular fibrous morphologies: Computational design, simulation and fabrication of differentiated fibre composite building components. In Advances in Architectural Geometry; Springer: Berlin/Heidelberg, Germany, 2014; pp. 29–45. [Google Scholar]
- Well, F.; Ludwig, F. Blue–green architecture: A case study analysis considering the synergetic effects of water and vegetation. Front. Arch. Res. 2020, 9, 191–202. [Google Scholar] [CrossRef]
- Ludwig, F.; Schönle, D. Growth as a Concept. In Hortitecture—The Power of Architecture and Plants; JOVIS: Berlin, Germany, 2018; pp. 65–71. [Google Scholar]
- Ludwig, F. Baubotanik: Designing with Living Material. In Materiality and Architecture; Löschke, S., Ed.; Routledge: Abingdon, UK, 2016; pp. 206–216. [Google Scholar]
- Weisstein, E.W. Space-filling Polyhedron. From MathWorld-A Wolfram. Available online: https://mathworld.wolfram.com/Space-FillingPolyhedron.html (accessed on 16 July 2020).
- Ludwig, F.; Schwertfreger, H.; Storz, O. Living Systems: Designing Growth in Baubotanik. Arch. Des. 2012, 82, 82–87. [Google Scholar] [CrossRef]
- Van Dooren, N. Drawing Time: The Representation of Change and Dynamics in Dutch Landscape Architectural Practice After 1985. Ph.D Thesis, Amsterdam Institute for Humanities Research, Amsterdam, The Netherlands, 2017. [Google Scholar]
- Wong, N.H.; Tan, A.Y.K.; Tan, P.Y.; Wong, N.C. Energy Simulation of Vertical Greenery Systems. Energy Build. 2009, 41, 1401–1408. [Google Scholar] [CrossRef]
- Vos, P.E.; Maiheu, B.; Vankerkom, J.; Janssen, S. Improving local air quality in cities: To tree or not to tree? Environ. Pollut. 2013, 183, 113–122. [Google Scholar] [CrossRef]
- Göçer, Ö.; Hua, Y.; Göçer, K. Completing the missing link in building design process: Enhancing post-occupancy evaluation method for effective feedback for building performance. Build. Environ. 2015, 89, 14–27. [Google Scholar] [CrossRef]
- Basbagill, J.P.; Flager, F.; Lepech, M. A multi-objective feedback approach for evaluating sequential conceptual building design decisions. Autom. Constr. 2014, 45, 136–150. [Google Scholar] [CrossRef]
- Lloret, E.; Shahab, A.R.; Linus, M.; Flatt, R.J.; Gramazio, F.; Kohler, M.; Langenberg, S. Complex concrete structures. Comput. Des. 2015, 60, 40–49. [Google Scholar] [CrossRef]
- Roudsari, M.S. Ladybug Tools (by Mostapha Sadeghipour Roudsari). Available online: https://www.food4rhino.com/app/ladybug-tools (accessed on 14 November 2018).
- Huttner, S.; Bruse, M. Numerical modeling of the urban climate–a preview on ENVI-met 4.0. In Proceedings of the 7th International Conference on Urban Climate ICUC-7, Yokohama, Japan, 29 June–3 July 2009. [Google Scholar]
- Krish, S. A practical generative design method. Comput. Des. 2011, 43, 88–100. [Google Scholar]
- Sievänen, R.; Nikinmaa, E.; Nygren, P.; Ozier-Lafontaine, H.; Perttunen, J.; Hakula, H. Components of functional-structural tree models. Ann. For. Sci. 2000, 57, 399–412. [Google Scholar] [CrossRef] [Green Version]
- Allen, M.T.; Prusinkiewicz, P.; DeJong, T.M. Using L-systems for modeling source-sink interactions, architecture and physiology of growing trees: The L-PEACH model. New Phytol. 2005, 166, 869–880. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vos, J.; Vos, J.; Evers, J.B.; Buck-Sorlin, G.H.; Andrieu, B.; Chelle, M.; De Visser, P.H. Functional–structural plant modelling: A new versatile tool in crop science. J. Exp. Bot. 2010, 61, 2101–2115. [Google Scholar] [CrossRef] [PubMed]
- Palubicki, W.; Horel, K.; Longay, S.; Runions, A.; Lane, B.; Měch, R.; Prusinkiewicz, P. Self-organizing tree models for image synthesis. ACM Trans. Graph. 2009, 28, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Lindenmayer, A. Mathematical models for cellular interactions in development I. Filaments with one-sided inputs. J. Theor. Boil. 1968, 18, 280–299. [Google Scholar] [CrossRef]
- Prusinkiewicz, P. Modeling of spatial structure and development of plants: A review. Sci. Hortic. 1998, 74, 113–149. [Google Scholar] [CrossRef]
- Prusinkiewicz, P.; Lindenmayer, A.; Hanan, J. Development models of herbaceous plants for computer imagery purposes. In Proceedings of the SIGGRAPH88: 15th Annual conference on Computer Graphics, Atlanta, GA, USA, 1–5 August 1988. [Google Scholar]
- Beneš, B.; Millán, E.U. Virtual climbing plants competing for space. In Proceedings of the of Computer Animation 2002 (CA 2002), Geneva, Switzerland, 21 June 2020. [Google Scholar]
- Knutzen, J.; Saito, S. Generating Climbing Plants Using l-Systems; Chalmers University of Technology: Göteborg, Sweden, 2009. [Google Scholar]
- Hädrich, T.; Benes, B.; Deussen, O.; Pirk, S. Interactive Modeling and Authoring of Climbing Plants. In Computer Graphics Forum; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]
- Putz, F.E.; Mooney, H.A. The Biology of Vines; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Hart, J.W. Plant Tropisms: And other Growth Movements; Springer: Berlin/Heidelberg, Germany, 1990. [Google Scholar]
- Stolarz, M. Circumnutation as a visible plant action and reaction. Plant Signal. Behav. 2009, 4, 380–387. [Google Scholar] [CrossRef]
- Kitazawa, D.; Hatakeda, Y.; Kamada, M.; Fujii, N.; Miyazawa, Y.; Hoshino, A.; Iida, S.; Fukaki, H.; Morita, M.T.; Tasaka, M.; et al. From The Cover: Shoot circumnutation and winding movements require gravisensing cells. Proc. Natl. Acad. Sci. USA 2005, 102, 18742–18747. [Google Scholar] [CrossRef] [Green Version]
- Prusinkiewicz, P.; Hammel, M.; Hanan, J.; Měch, R. Visual models of plant development. In Handbook of Formal Languages; Springer: Berlin/Heidelberg, Germany, 1997; pp. 535–597. [Google Scholar]
- Energy Plus. EnergyPlus | EnergyPlus. Available online: https://energyplus.net/ (accessed on 2 December 2018).
- Wareing, P.; Nasr, T. Gravimorphism in trees: 1. Effects of gravity on growth and apical dominance in fruit trees. Ann. Bot. 1961, 25, 321–340. [Google Scholar] [CrossRef]
- Brown, C.L.; McAlpine, R.G.; Kormanik, P.P. Apical dominance and form in woody plants: A reappraisal. Am. J. Bot. 1967, 54, 153–162. [Google Scholar] [CrossRef]
- Drawing of the plant. Attribution-NonCommercial-ShareAlike 3.0 Unported (CC BY-NC-SA 3.0). Available online: http://temperate.theferns.info/image/Akebia+quinata (accessed on 10 July 2020).
- Fassadengruen.de. Mittlerer Bausatz auf der Rückfront einer Garage, Distanzhalter für Betongaragen WM 10081, Akebie und Clematis. Available online: https://www.fassadengruen.de/uw/drahtseil/uw/spaliersysteme/uw/sys7020/sys7020.html (accessed on 10 July 2020).
- Fassadengruen.de. Climbing Plants on a Climbing aid in a Courtyard. Available online: https://www.fassadengruen.de/en/ideas.htm (accessed on 10 July 2020).
- Kohek, Š.; Guid, N.; Tojnko, S.; Unuk, T.; Kolmanič, S. EduAPPLE: Interactive teaching tool for apple tree crown formation. HortTechnology 2015, 25, 238–246. [Google Scholar] [CrossRef] [Green Version]


© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shu, Q.; Middleton, W.; Dörstelmann, M.; Santucci, D.; Ludwig, F. Urban Microclimate Canopy: Design, Manufacture, Installation, and Growth Simulation of a Living Architecture Prototype. Sustainability 2020, 12, 6004. https://doi.org/10.3390/su12156004
Shu Q, Middleton W, Dörstelmann M, Santucci D, Ludwig F. Urban Microclimate Canopy: Design, Manufacture, Installation, and Growth Simulation of a Living Architecture Prototype. Sustainability. 2020; 12(15):6004. https://doi.org/10.3390/su12156004
Chicago/Turabian StyleShu, Qiguan, Wilfrid Middleton, Moritz Dörstelmann, Daniele Santucci, and Ferdinand Ludwig. 2020. "Urban Microclimate Canopy: Design, Manufacture, Installation, and Growth Simulation of a Living Architecture Prototype" Sustainability 12, no. 15: 6004. https://doi.org/10.3390/su12156004
APA StyleShu, Q., Middleton, W., Dörstelmann, M., Santucci, D., & Ludwig, F. (2020). Urban Microclimate Canopy: Design, Manufacture, Installation, and Growth Simulation of a Living Architecture Prototype. Sustainability, 12(15), 6004. https://doi.org/10.3390/su12156004