Use of Sentinel-1 GRD SAR Images to Delineate Flood Extent in Pakistan



Abstract
1. Introduction
2. Study Area and Dataset
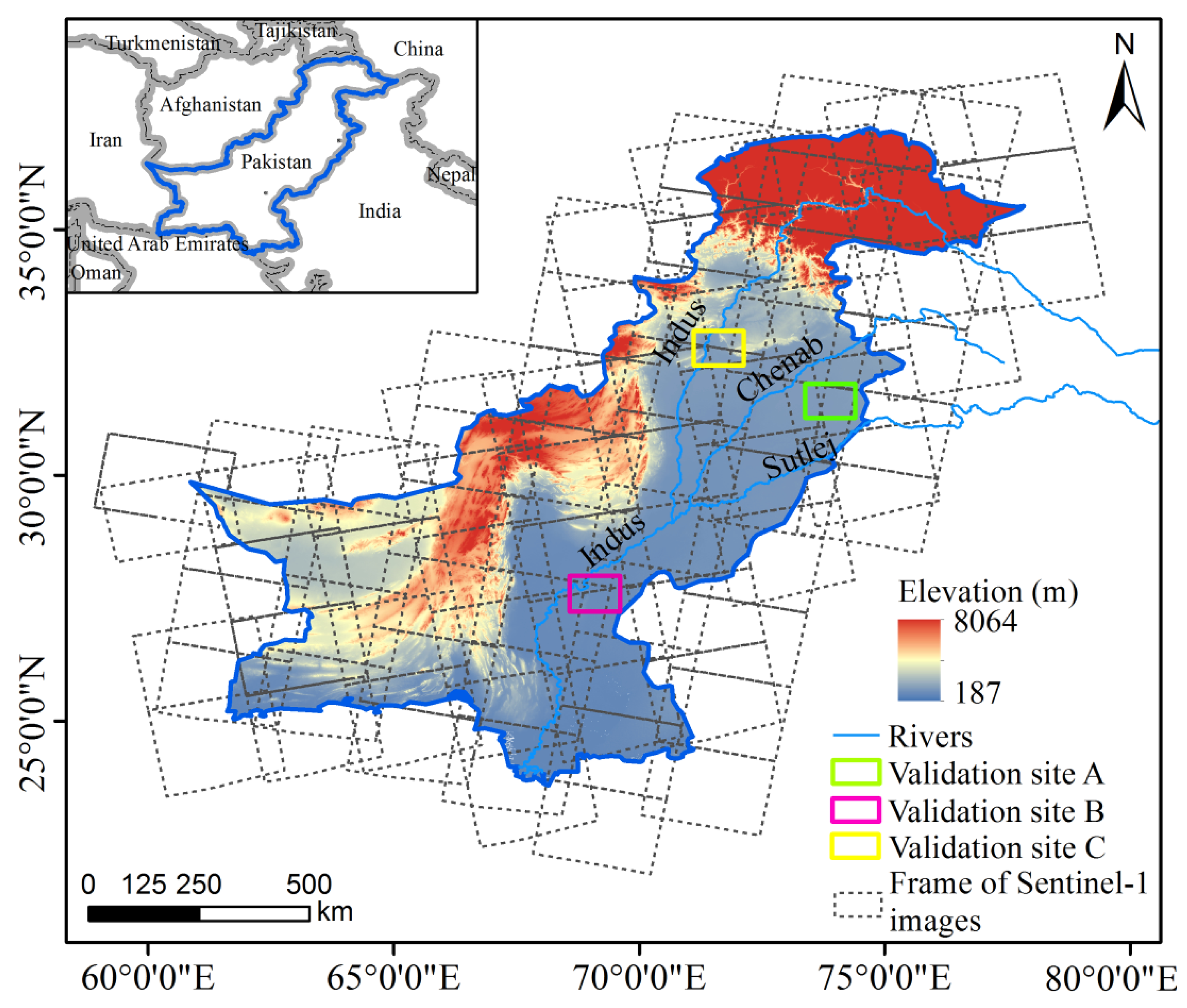
2.1. Study Area
2.2. Dataset
3. Methodology
3.1. Accessing and Preprocessing Images
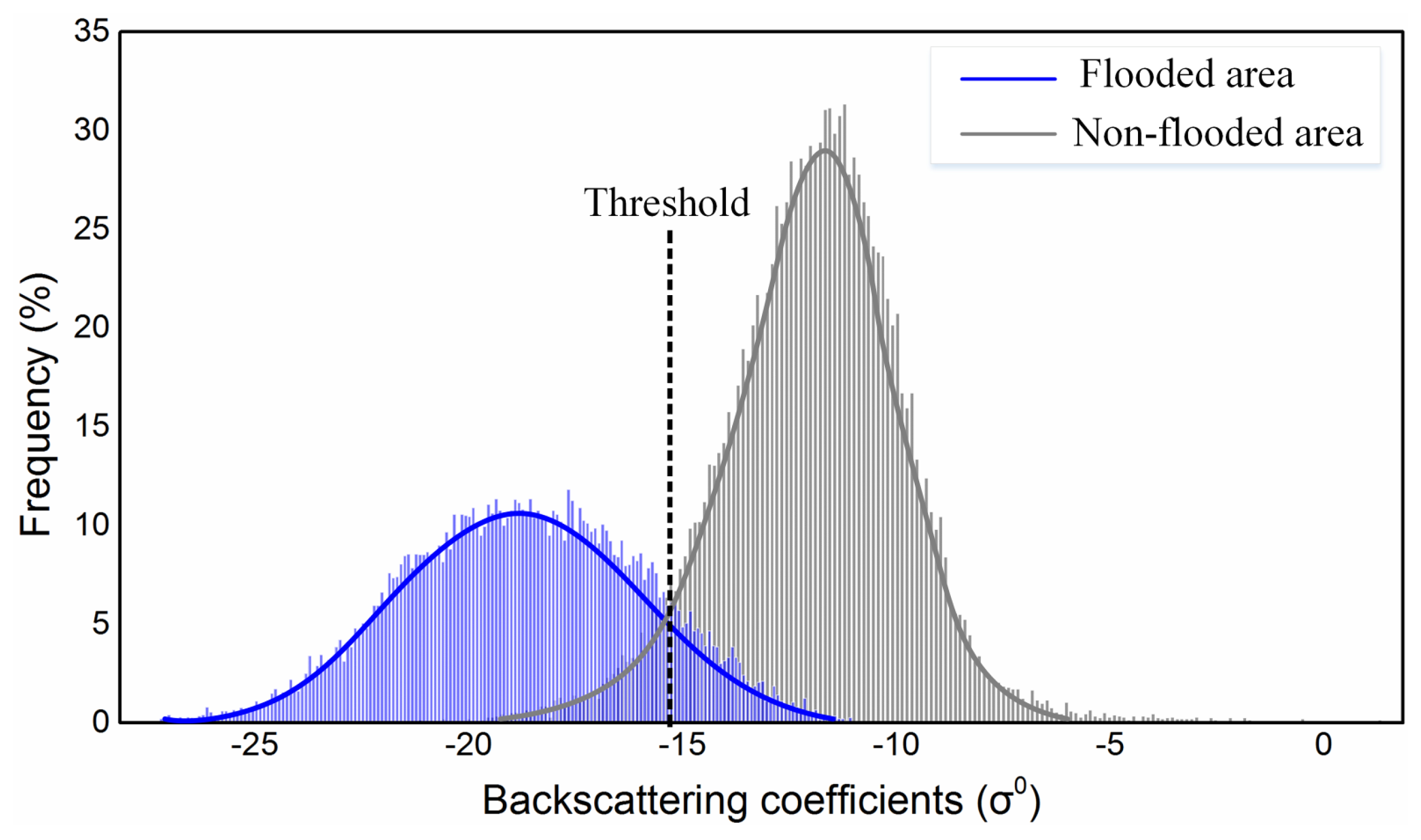
3.2. Thresholding Based on Probability Density Function
3.3. Fuzzy Logic-Based Refinement
3.4. Morphological Processing and Extraction
4. Results and Discussion
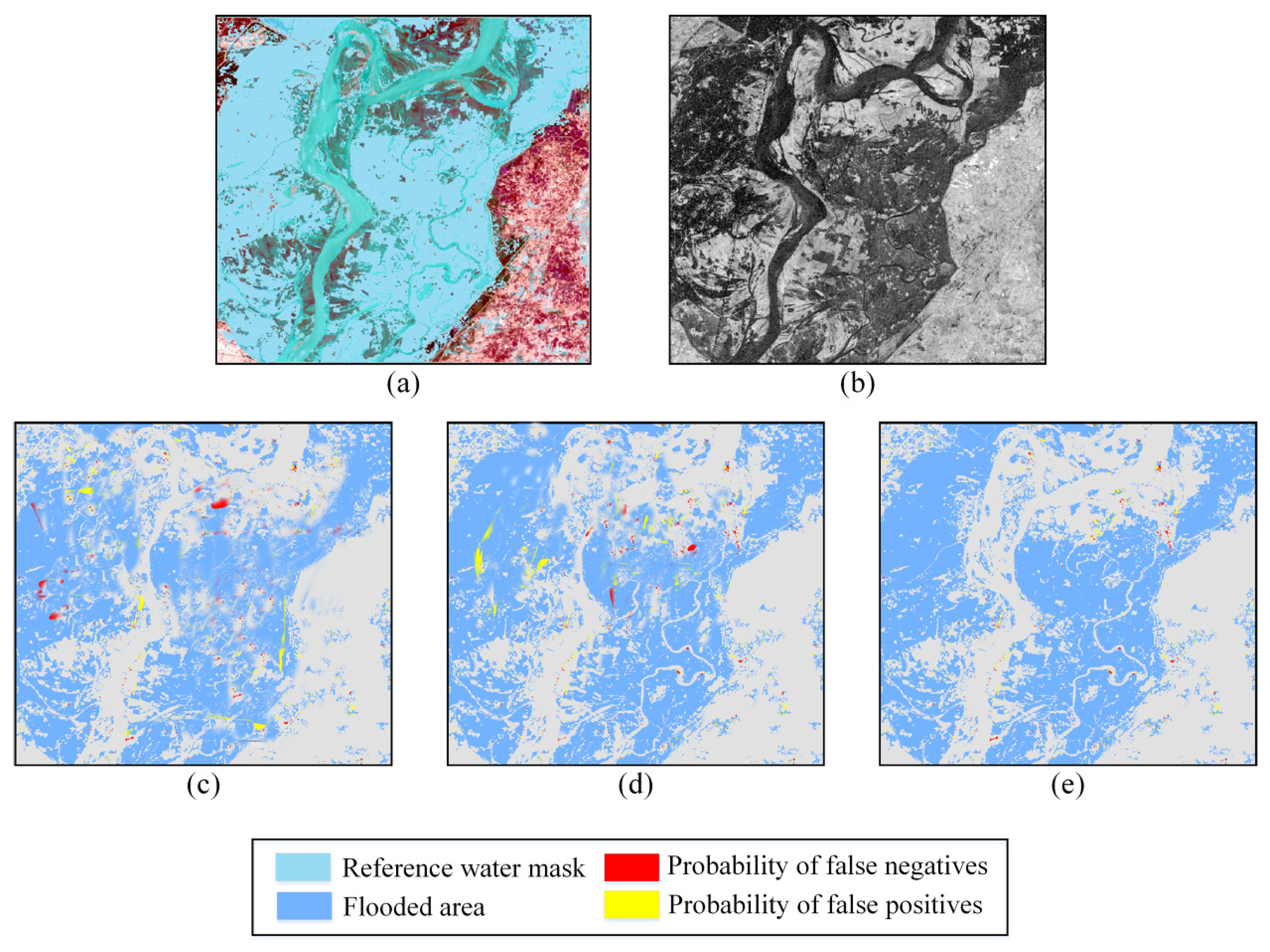
4.1. Results and Quantitative Analysis
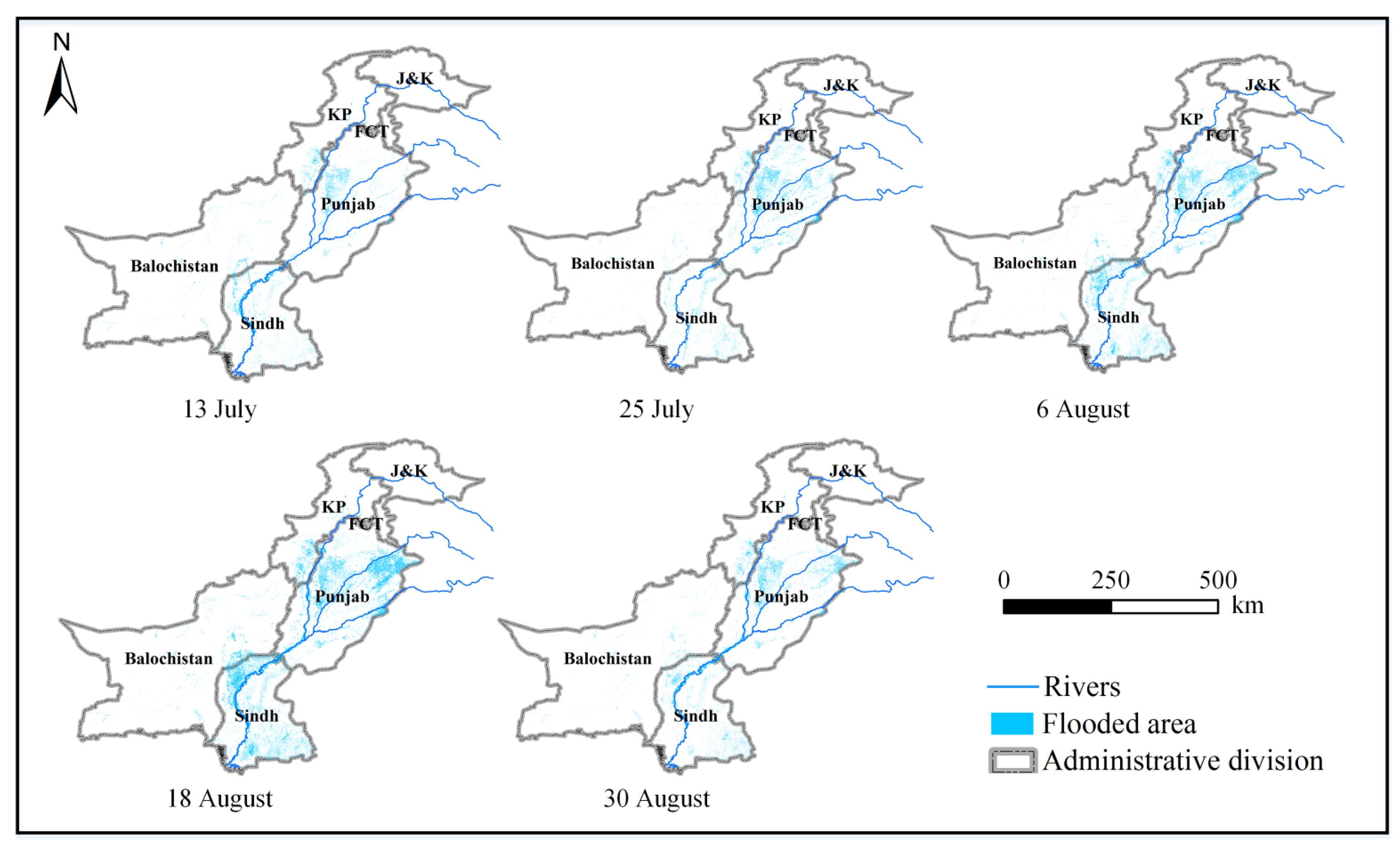
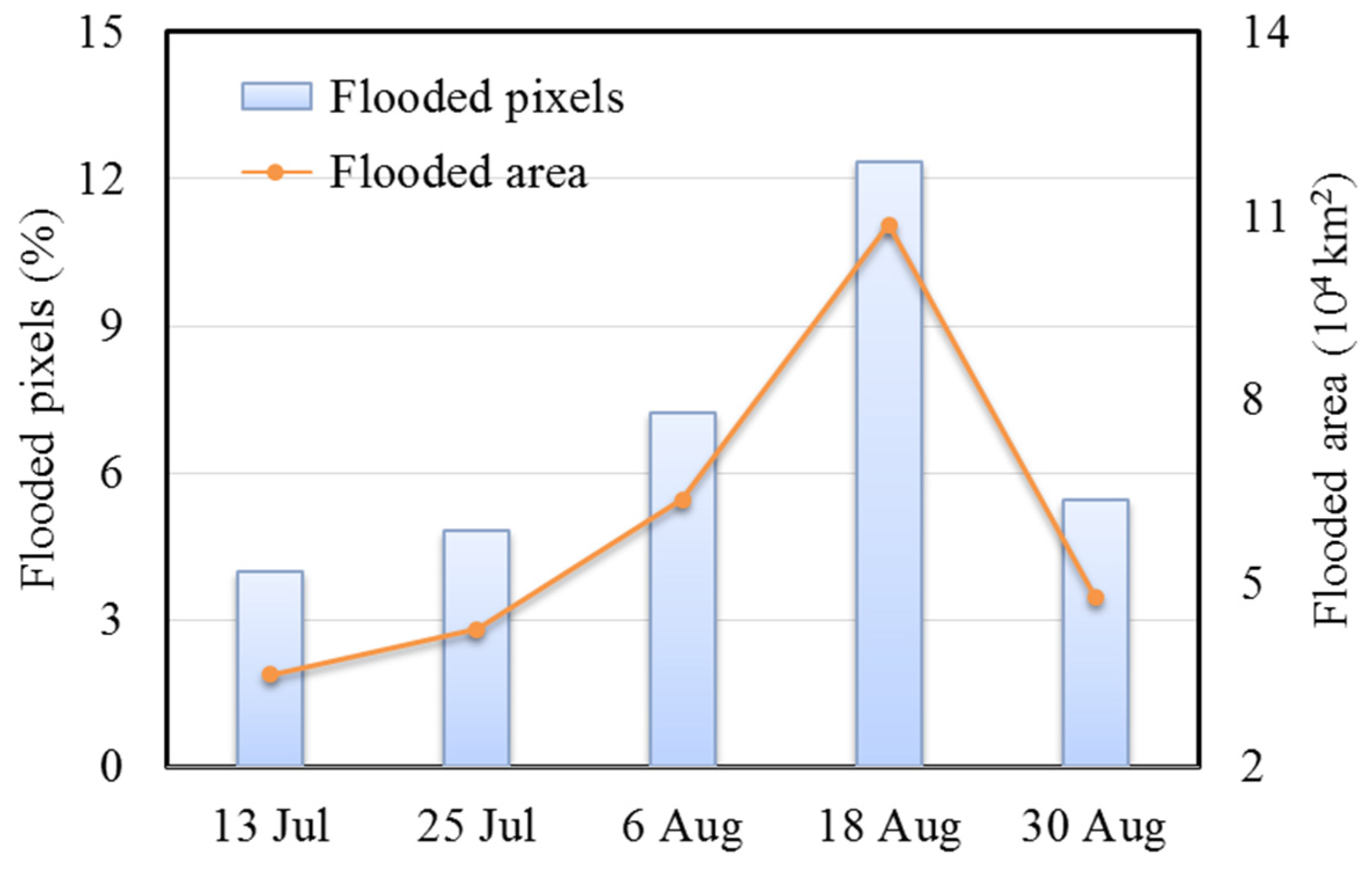
4.2. Flood Extent in Pakistan
4.3. Flood Frequency
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Martinez, J.M.; Toan, T.L. Mapping of flood dynamics and spatial distribution of vegetation in the amazon floodplain using multitemporal sar data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Landuyt, L.; Van Wesemael, A.; Schumann, G.J.P.; Hostache, R.; Verhoest, N.E.C.; Van Coillie, F.M.B. Flood mapping based on synthetic aperture radar: An assessment of established approaches. IEEE Trans. Geosci. Remote Sens. 2019, 57, 722–739. [Google Scholar] [CrossRef]
- Dumitru, C.O.; Cui, S.; Faur, D.; Datcu, M. Data analytics for rapid mapping: Case study of a flooding event in germany and the tsunami in japan using very high resolution sar images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 114–129. [Google Scholar] [CrossRef]
- García-Pintado, J.; Mason, D.C.; Dance, S.L.; Cloke, H.L.; Neal, J.C.; Freer, J.; Bates, P.D. Satellite-supported flood forecasting in river networks: A real case study. J. Hydrol. 2015, 523, 706–724. [Google Scholar] [CrossRef]
- Klemas, V. Remote sensing of floods and flood-prone areas: An overview. J. Coast. Res. 2015, 31, 1005–1013. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Plank, S.; Ludwig, R. An automatic change detection approach for rapid flood mapping in sentinel-1 sar data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 123–135. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood extent mapping for namibia using change detection and thresholding with sar. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Townsend, P.A.; Walsh, S.J. Modeling floodplain inundation using an integrated gis with radar and optical remote sensing. Geomorphology 1998, 21, 295–312. [Google Scholar] [CrossRef]
- Pricope, N.G. Variable-source flood pulsing in a semi-arid transboundary watershed: The chobe river, botswana and namibia. Environ. Monit. Assess. 2013, 185, 1883–1906. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Simonett, D.S. Radar detection of flooding beneath the forest canopy—A review. Int. J. Remote Sens. 1990, 11, 1313–1325. [Google Scholar] [CrossRef]
- Mason, D.C.; Davenport, I.J.; Neal, J.C.; Schumann, G.J.-P.; Bates, P.D. Near real-time flood detection in urban and rural areas using high-resolution synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3041–3052. [Google Scholar] [CrossRef]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multitemporal sar images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution terrasar-x data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Horritt, M.S.; Mason, D.C.; Luckman, A.J. Flood boundary delineation from synthetic aperture radar imagery using a statistical active contour model. Int. J. Remote Sens. 2001, 22, 2489–2507. [Google Scholar] [CrossRef]
- Pradhan, B.; Tehrany, M.S.; Jebur, M.N. A new semiautomated detection mapping of flood extent from terrasar-x satellite image using rule-based classification and taguchi optimization techniques. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4331–4342. [Google Scholar] [CrossRef]
- D’Addabbo, A.; Refice, A.; Pasquariello, G.; Lovergine, F.P.; Capolongo, D.; Manfreda, S. A bayesian network for flood detection combining sar imagery and ancillary data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3612–3625. [Google Scholar] [CrossRef]
- Amitrano, D.; Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Unsupervised rapid flood mapping using sentinel-1 grd sar images. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3290–3299. [Google Scholar] [CrossRef]
- Wang, N.; Chen, F.; Yu, B.; Qin, Y. Segmentation of large-scale remotely sensed images on a spark platform: A strategy for handling massive image tiles with the mapreduce model. ISPRS J. Photogramm. Remote Sens. 2020, 162, 137–147. [Google Scholar] [CrossRef]
- Yu, B.; Yang, L.; Chen, F. Semantic segmentation for high spatial resolution remote sensing images based on convolution neural network and pyramid pooling module. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3252–3261. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, M.; Tian, B.; Li, Z. Extraction of glacial lake outlines in tibet plateau using landsat 8 imagery and google earth engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4002–4009. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Z.; Wang, X.; Lei, X.; Liu, P.; Feng, M.; Khu, S.-T.; Wang, H. A novel method for deriving reservoir operating rules based on flood classification-aggregation-decomposition. J. Hydrol. 2019, 568, 722–734. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Wieland, M.; Schlaffer, S.; Natsuaki, R. Urban flood mapping using sar intensity and interferometric coherence via bayesian network fusion. Remote Sens. 2019, 11, 2231. [Google Scholar] [CrossRef]
- Zhao, M.; Ling, Q.; Li, F. An iterative feedback-based change detection algorithm for flood mapping in sar images. IEEE Geoence Remote Sens. Lett. 2019, 16, 231–235. [Google Scholar] [CrossRef]
- Cook, A.; Merwade, V. Effect of topographic data, geometric configuration and modeling approach on flood inundation mapping. J. Hydrol. 2009, 377, 131–142. [Google Scholar] [CrossRef]
- Clement, M.A.; Kilsby, C.G.; Moore, P. Multi-temporal sar flood mapping using change detection. J. Flood Risk Manag. 2018, 11, 152–168. [Google Scholar] [CrossRef]
- Gan, T.Y.; Zunic, F.; Kuo, C.-C.; Strobl, T. Flood mapping of danube river at romania using single and multi-date ers2-sar images. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 69–81. [Google Scholar] [CrossRef]
- Martinis, S.; Rieke, C. Backscatter analysis using multi-temporal and multi-frequency sar data in the context of flood mapping at river saale, germany. Remote Sens. 2015, 7, 7732–7752. [Google Scholar] [CrossRef]
- Stevens, M.R.; Hanschka, S. Municipal flood hazard mapping: The case of british columbia, canada. Nat. Hazards 2014, 73, 907–932. [Google Scholar] [CrossRef]
- Miyoun, J.; Peyré, G.; Cohen, L.D. Non-local active contours. Siam J. Imaging Sci. 2012, 5, 1022–1054. [Google Scholar]
- Aubert, G.; Barlaud, M.; Faugeras, O.; Jehan-Besson, S. Image segmentation using active contours: Calculus of variations or shape gradients? Siam J. Appl. Math. 2003, 63, 2128–2154. [Google Scholar] [CrossRef]
- Iqbal, N.; Hossain, F.; Lee, H.; Akhter, G. Satellite gravimetric estimation of groundwater storage variations over indus basin in pakistan. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3524–3534. [Google Scholar] [CrossRef]
- Sankaya, M.A.; Bishop, M.P.; Shroder, J.F.; Ali, G. Remote-sensing assessment of glacier fluctuations in the hindu raj, pakistan. Int. J. Remote Sens. 2013, 34, 3968–3985. [Google Scholar]
- Rowan, L.C.; Schmidt, R.G.; Mars, J.C. Distribution of hydrothermally altered rocks in the reko diq, pakistan mineralized area based on spectral analysis of aster data. Remote Sens. Environ. 2006, 104, 74–87. [Google Scholar] [CrossRef]
- Khan, S.I.; Hong, Y.; Gourley, J.J.; Khattak, M.U.; De Groeve, T. Multi-sensor imaging and space-ground cross-validation for 2010 flood along indus river, pakistan. Remote Sens. 2014, 6, 2393–2407. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (ndwi) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Schreier, G. Sar geocoding: Data and systems. Karlsruhe Wichmann 1993. [Google Scholar]
- Wu, S.; Liu, R.; Yommy, A.S. Sar image despeckling using refined lee filter. In Proceedings of the 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2015. [Google Scholar]
- Jafarzadegan, K.; Merwade, V. A dem-based approach for large-scale floodplain mapping in ungauged watersheds. J. Hydrol. 2017, 550, 650–662. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Z.; Tian, B.; Zhou, J.; Zeng, J. A method for monitoring hydrological conditions beneath herbaceous wetlands using multi-temporal alos palsar coherence data. Remote Sens. Lett. 2015, 6, 618–627. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A. Statistics of the stokes parameters and of the complex coherence parameters in one-look and multilook speckle fields. IEEE Trans. Geosci. Remote Sens. 1996, 34, 519–531. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A. A hierarchical spatio-temporal markov model for improved flood mapping using multi-temporal x-band sar data. Remote Sens. 2010, 2, 2240–2258. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated terrasar-x based flood service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. An algorithm for operational flood mapping from synthetic aperture radar (sar) data using fuzzy logic. Nat. Hazards Earth Syst. Sci. 2011, 11. [Google Scholar] [CrossRef]
- Jain, M.; Dimri, A.P. Efficacy of filtering techniques in improving landsat slc-off thermal infrared data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 271–284. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, F.; Tian, B. Glacial lake detection from gaofen-2 multispectral imagery using an integrated nonlocal active contour approach: A case study of the altai mountains, northern xinjiang province. Water 2018, 10, 455. [Google Scholar] [CrossRef]
- Ohki, M.; Tadono, T.; Itoh, T.; Ishii, K.; Yamanokuchi, T.; Shimada, M. Flood detection in built-up areas using interferometric phase statistics of palsar-2 data. IEEE Geosci. Remote Sens. Lett. 2020, 1–5. [Google Scholar] [CrossRef]
- Shahabi, H.; Shirzadi, A.; Ghaderi, K.; Omidvar, E.; Al-Ansari, N.; Clague, J.J.; Geertsema, M.; Khosravi, K.; Amini, A.; Bahrami, S.; et al. Flood detection and susceptibility mapping using sentinel-1 remote sensing data and a machine learning approach. Remote Sens. 2020, 12, 266. [Google Scholar] [CrossRef]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Motagh, M. Multi-temporal, multi-frequency, and multi-polarization coherence and sar backscatter analysis of wetlands. ISPRS J. Photogramm. Remote Sens. 2018, 142, 78–93. [Google Scholar] [CrossRef]
- Uddin, K.; Matin, M.A.; Meyer, F.J. Operational flood mapping using multi-temporal sentinel-1 sar images: A case study from bangladesh. Remote Sens. 2019, 11, 1581. [Google Scholar] [CrossRef]
- Martinis, S.; Plank, S.; Ćwik, K. The use of sentinel-1 time-series data to improve flood monitoring in arid areas. Remote Sens. 2018, 10, 583. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Z.; Tian, B.; Zhou, J.; Tang, P. The backscattering characteristics of wetland vegetation and water-level changes detection using multi-mode sar: A case study. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 1–13. [Google Scholar] [CrossRef]
- Touzi, R.; Deschamps, A.; Rother, G. Phase of target scattering for wetland characterization using polarimetric c-band sar. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3241–3261. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Site | Method | PFP (%) | PFN (%) | F-Measure (%) | Kappa | Overall Accuracy (%) |
|---|---|---|---|---|---|---|
| A | Proposed method | 4.12 | 14.75 | 90.25 | 0.893 | 91.1 |
| Ohki et al., 2020 | 10.95 | 19.68 | 84.46 | 0.826 | 83.5 | |
| Shahabi et al., 2020 | 12.46 | 25.47 | 80.51 | 0.795 | 78.4 | |
| B | Proposed method | 2.59 | 4.62 | 96.38 | 0.954 | 96.6 |
| Ohki et al., 2020 | 6.83 | 10.97 | 91.05 | 0.895 | 89.4 | |
| Shahabi et al., 2020 | 5.96 | 12.29 | 90.76 | 0.873 | 88.1 | |
| C | Proposed method | 4.03 | 10.89 | 92.41 | 0.918 | 93.4 |
| Ohki et al., 2020 | 5.21 | 17.69 | 88.11 | 0.841 | 87.6 | |
| Shahabi et al., 2020 | 14.35 | 13.84 | 85.90 | 0.837 | 85.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Chen, F.; Liang, D.; Tian, B.; Yang, A. Use of Sentinel-1 GRD SAR Images to Delineate Flood Extent in Pakistan. Sustainability 2020, 12, 5784. https://doi.org/10.3390/su12145784
Zhang M, Chen F, Liang D, Tian B, Yang A. Use of Sentinel-1 GRD SAR Images to Delineate Flood Extent in Pakistan. Sustainability. 2020; 12(14):5784. https://doi.org/10.3390/su12145784
Chicago/Turabian StyleZhang, Meimei, Fang Chen, Dong Liang, Bangsen Tian, and Aqiang Yang. 2020. "Use of Sentinel-1 GRD SAR Images to Delineate Flood Extent in Pakistan" Sustainability 12, no. 14: 5784. https://doi.org/10.3390/su12145784
APA StyleZhang, M., Chen, F., Liang, D., Tian, B., & Yang, A. (2020). Use of Sentinel-1 GRD SAR Images to Delineate Flood Extent in Pakistan. Sustainability, 12(14), 5784. https://doi.org/10.3390/su12145784