2.1. Approaching Time
In this study, the approaching maneuver has been modeled as follows.
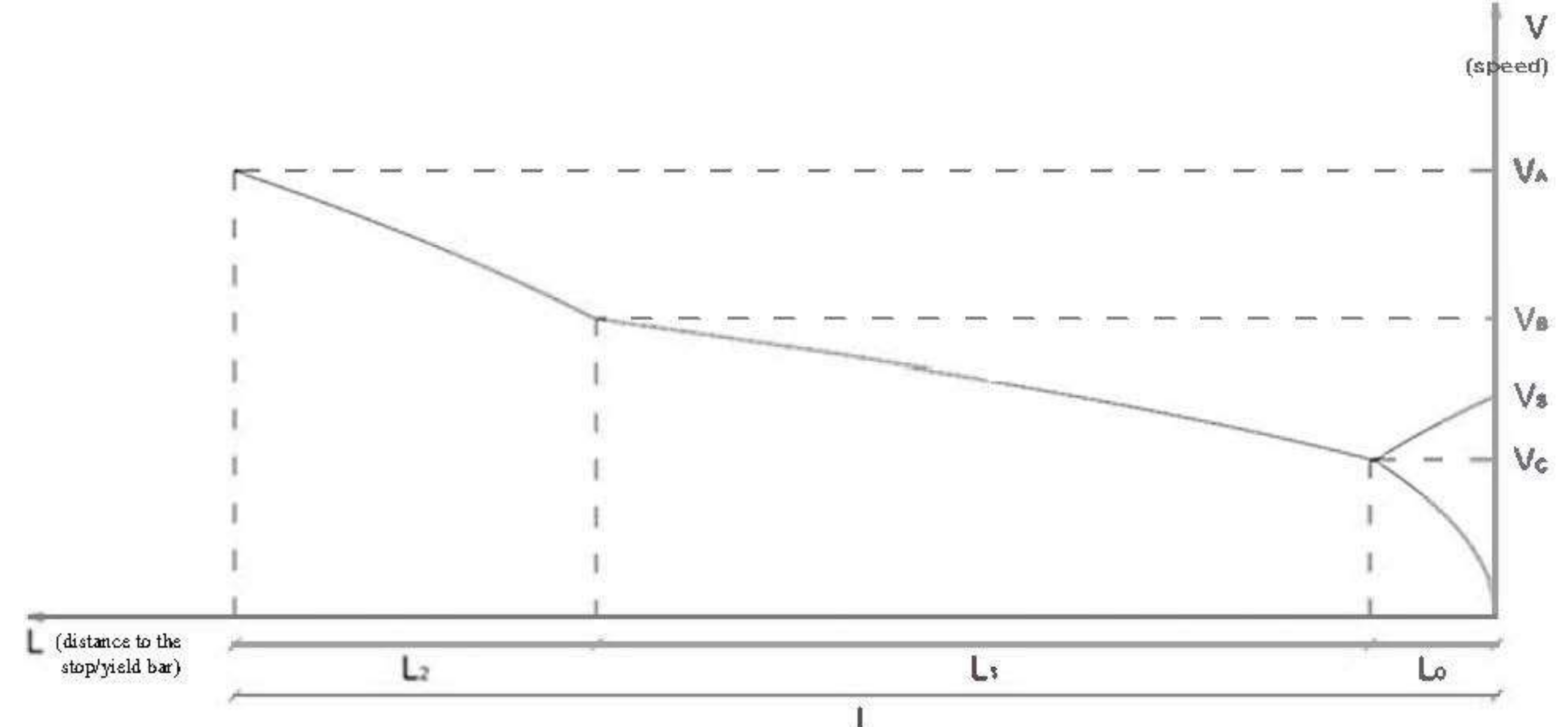
During
tAPP, the driver travels along the road stretch L, which is the approaching leg: it starts from the road section when the driver perceives the intersection moving at the speed
VA and ends at the stop (or yield) bar. According to the Italian standard for road design [
27] and the common layouts for road signaling at intersections,
L is assumed to be equal to 150 m.
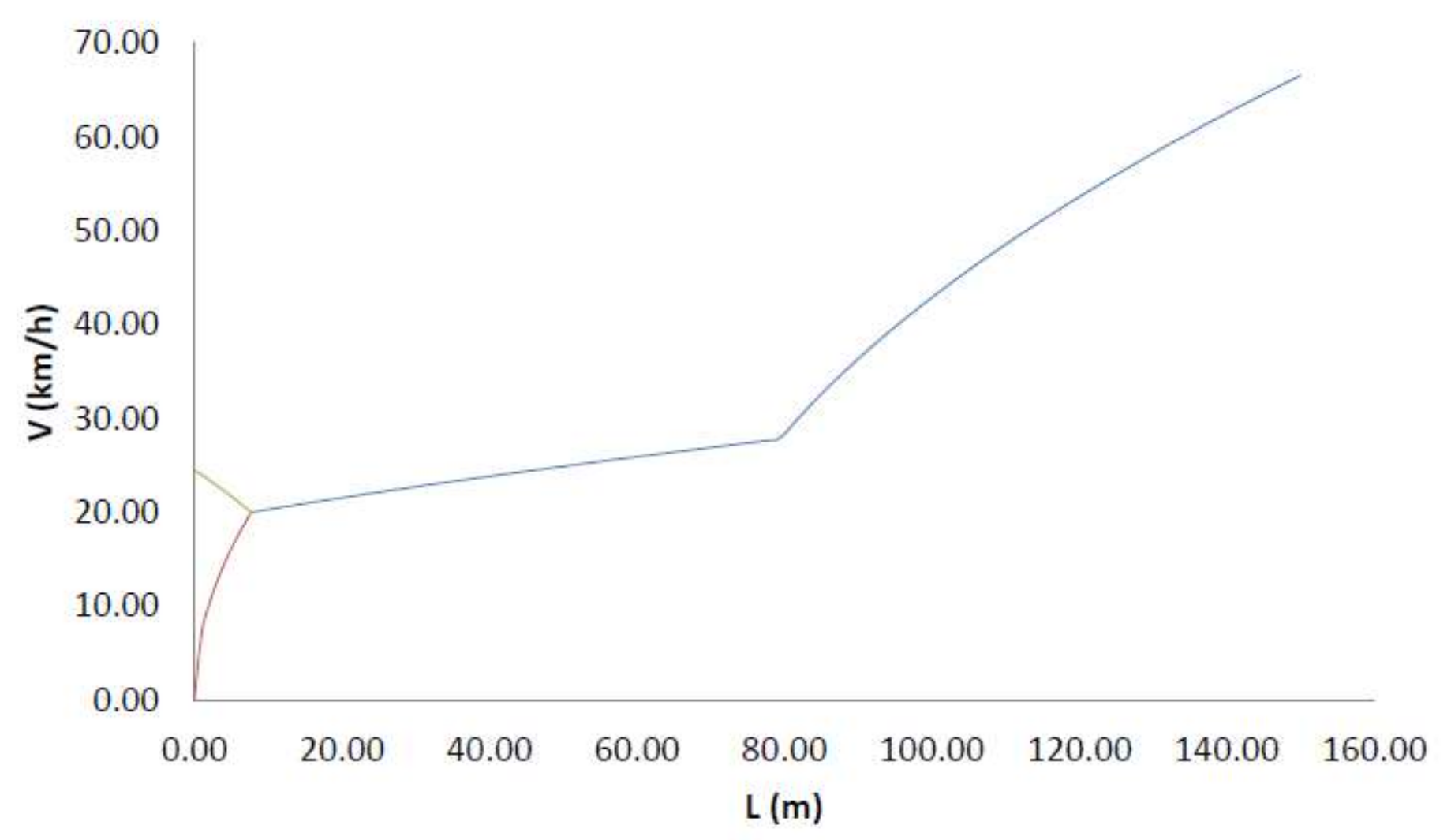
L is composed by different dynamic conditions along its three subsections (
Figure 1):
in the subsection (L2), the driver decelerates from the current design speed (VA) using the braking system until reaching VB;
in the ensuing subsection (L1), the driver starts to analyze the other traffic flow to identify a possible acceptable gap. In this phase, the driver does not use the braking system until he reaches the decision point at the speed VC;
in the last subsection (L0), two options are available. The driver can stop the vehicle at the stop bar or he can find an acceptable gap to maneuver without stopping the vehicle (i.e., a continuous maneuver) at the yield bar.
According to the principle of kinetic energy conservation and the rule of uniformly accelerated motion, Equations (3) to (8) can be used to describe the process.
where a is the acceleration from
VC to
VS;
VC is assumed to be equal to 20 km/h;
VS is the threshold speed of the vehicle when it does not stop at the intersection and starts its maneuver at the speed
VS;
d0,
d1, and
d2 are the constant deceleration values along subsections
L0,
L1, and
L2, respectively. Deceleration values can be obtained through experimental observation. However,
d1 satisfies Equation (9) to have reasonable results:
where
d1,max is the maximum reasonable value of
d1: it occurs when the driver starts uniformly decelerating from
VA to
VC when he is at a distance
L from the stop line.
Given Equations (3) to (8), it is possible to calculate the time spent by the driver along
L0,
L1, and
L2. The approaching time values for stopping and continuous maneuvers are
tAPP,0 and
tAPP,S (Equations (10) and (11), respectively).
According to [
11], the driver’s behavior could be described by the time he spends to analyze a scenario. When approaching an intersection, the vehicle moves in unsteady conditions: for this reason, the approaching leg
L should be divided into N dx-long branches (
dxi) (Equation (12)).
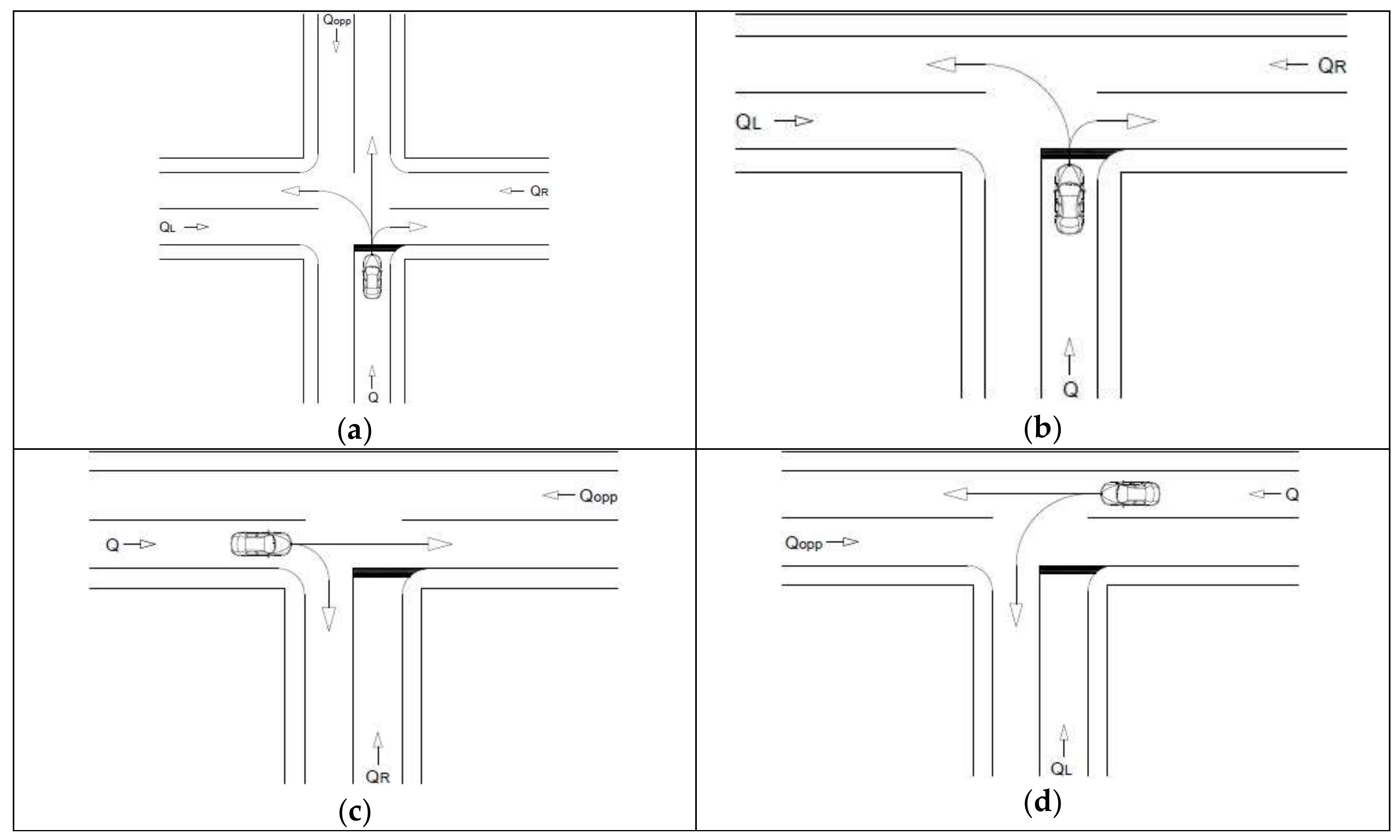
The discretization of L permits us to study the variation of eye’s fixation points varying the distance to the stop (or yield) bar. The driver’s fixations are affected by the presence (or absence) of some points of interest. In this study, 9 of them were considered:
A traffic light for crossing or turning-right vehicles;
A traffic light for turning-left vehicles when a dedicated turning lane is present;
Traffic coming from the left;
Traffic coming from the right;
Traffic coming from the opposite direction (for 4-leg intersection);
Pedestrian crossing on the left side of the approaching leg;
Pedestrian crossing on the right side of the approaching leg;
Vehicles on the left of the driver;
Vehicles on the right of the driver.
Having regard to a group of
m drivers, each
k-th point of interest [traffic element] along the
i-th branch is characterized by the average fixation time on it
td,k,i and the number of total fixations made by drivers on it f
T,k,i. Therefore, Equation (13) gives the overall average time
tf,d,i that a driver spends to analyze the
i-th
dxi:
where
M is the number of focused points of interest along
dxi and
ts is the time of saccade (i.e., small rapid jerky movement of the eye when it jumps from fixation on one point to another). In this study,
ts has been assumed equal to 225 ms [
28]; α is the percentile of risk propensity of a driver (considered as a representative of the average of driver population). This value describes the probability value that simulates a driver’s risk appetite (risk propensity).
Equation (14) gives the average time spent by drivers to analyze the approaching leg
td,a:
Given
td,a, it is possible to calculate the average speed
Vd that a driver has to maintain to analyze
L in safety conditions (Equation (15)). In this study,
Vd is the value assumed for
VA because it ensures the safety condition described herein.
The comparison between td,a and tAPP,0 or tAPP,S gives the conditions (Equations (16) to (19)):
The driver can analyze the scenario in safety conditions. This result is acceptable.
The driver cannot analyze the scenario under safety conditions because Vd is smaller than the travel speed. This condition is not acceptable: since the driver cannot analyze the intersection under safety conditions, he has to reduce his travel speed to approach safely the intersection.
Having regard to the continuous maneuver (Equation (11)), Equation (20) describes the time spent by a driver to evaluate the possibility of a continuous maneuver being needed:
In Equation (20)
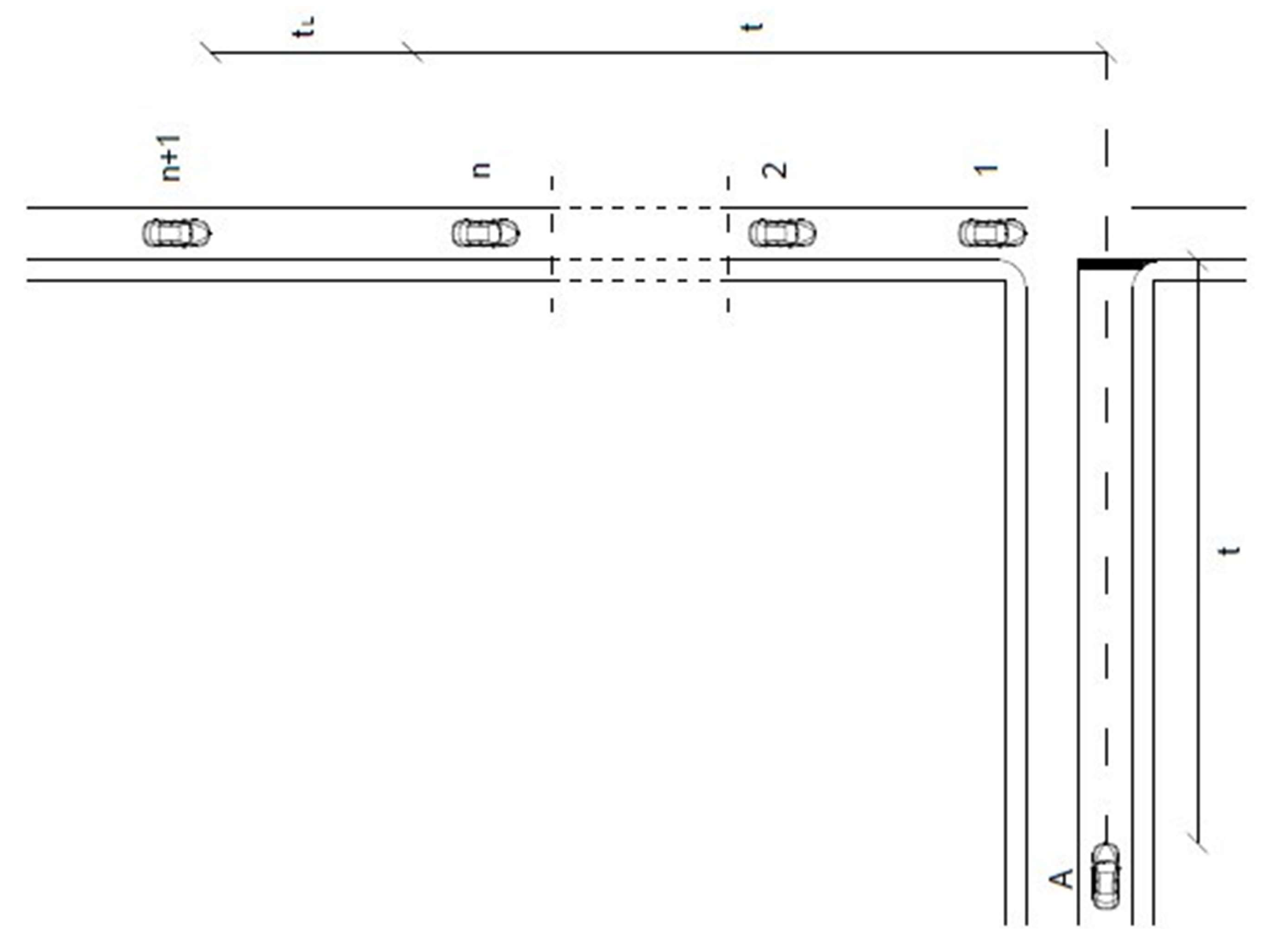
t2 is not considered because the driver starts to analyze the other traffic flows when he is at the point B (
Figure 1). In order to describe the process, the proposed probabilistic model considers that when a vehicle (vehicle A in
Figure 2) is arriving at the yield bar (during
T),
v vehicles pass along the perpendicular flow. Therefore, the Poisson distribution could describe the process (Equation (21)):
where
μ is the average number of vehicles that pass the intersection during
T and
Q is the traffic flow of perpendicular lanes.
Given
T and
Q, it is necessary to establish a percentile
Plim in order to find the (entire) number of vehicles (
v) such that the probability
v vehicles pass the intersection during
T is equal or more than
Plim (Equation (22)):
When the
v-th vehicle has passed the intersection, the time between the passing of vehicle
v and vehicle
v+1 is the available lap (
tL) for the approaching driver. Therefore, Equation (23) is valid and allows us to obtain
tL:
The comparison between
tL and the lap acceptance (
tLAP,A) identifies two conditions (Equations (24) and (25)):
The continuous maneuver is possible: the approaching time is
tAPP,S; or
The driver has to arrest a vehicle on the yield bar: the approaching time is tAPP,0.
2.2. Waiting Time
When Equation (25) is satisfied, or the driver stops his vehicle at the stop bar, he has to find an available gap τ that is not less than the gap acceptance
tGAP,A (Equation (26)):
This study proposed a model to describe how much time a driver needs to wait for on the stop (or yield) bar to find an available gap on the principal traffic flow. Probabilistic laws describe the distribution of vehicle spacing in a traffic flow [
21] in order to find the number of vehicular spacing that satisfy Equation (26). Equation (27) gives the number of suitable vehicular spacing for entry maneuver (
qi) when the exceedance probability
P(τ ≥ tGAP,A) and
q are multiplied (Equation (28)):
where
Q is the traffic flow in km/h,
q is the number of vehicular spacing in 1 s.
Under steady flow conditions, the Poisson distribution is suitable for describing the phenomenon of a single traffic stream. In such conditions, Equation (28) describes the number of suitable spacings (
ξ) during τ.
Equation (29) gives the percentile value when no enough vehicular spacing happens (
ξ=0) during
τ (i.e., the waiting time):
P(
ξ = 0) has been assumed to be equal to 0.8. However, the exponential curve gives not-null probability values for tending to zero time values; it is an impossible condition due to the finite length of vehicles. Therefore, a shifted exponential distribution proposed by [
29] has been considered (Equations (30) and (31)):
where
c is the lowest vehicular spacing for a given
Q value (e.g., 0.5–1 s according to [
3]), and
λ is assumed to be the reciprocal of
Q.
2.4. Data from the Literature
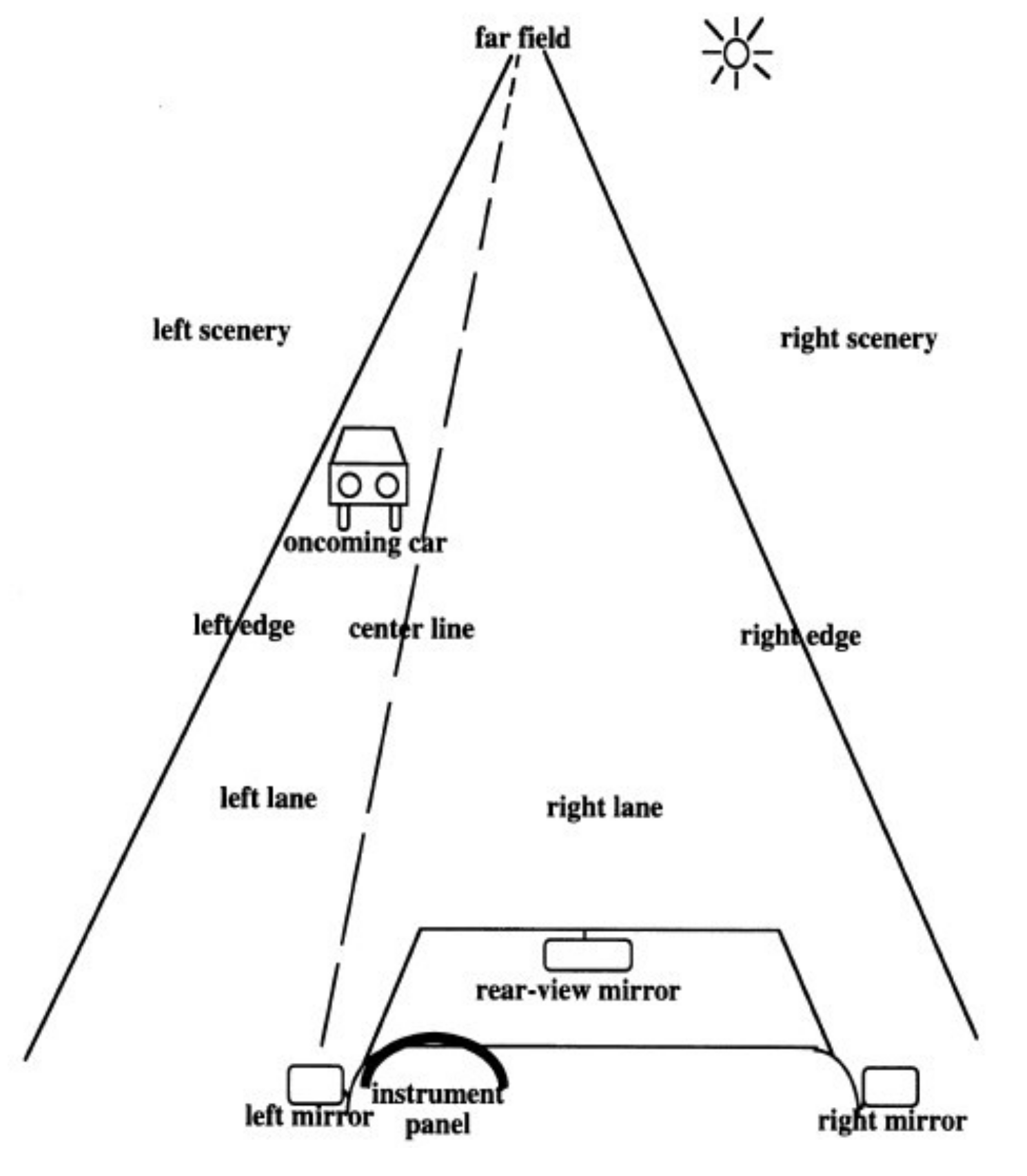
The proposed methodology has been implemented by using some parameters obtained from the literature, especially with regard to the data that could not be deduced from theoretical models or directly obtained from experimental surveys. This opportunity especially concerns the data regarding fixation parameters, that are available in the literature. Particularly, Colleen [
12] analyzed the fixation areas during the day (
Figure 3). She divided straight road sections into several zones (i.e., far field, right scenery, and left scenery) composed of different fields.
For a 106.68 m-long straight section, it was possible to calculate the time of fixations towards each field in
Figure 3 and obtain its fixation times. According to Equation (15), the sum of all fixation times and the length of the examined section allowed calculation of
Vd (i.e., the average speed along a straight section): in this study
Vd and
VA are 66.56 km/h.
On the other hand, two studies conducted by Higgins [
13,
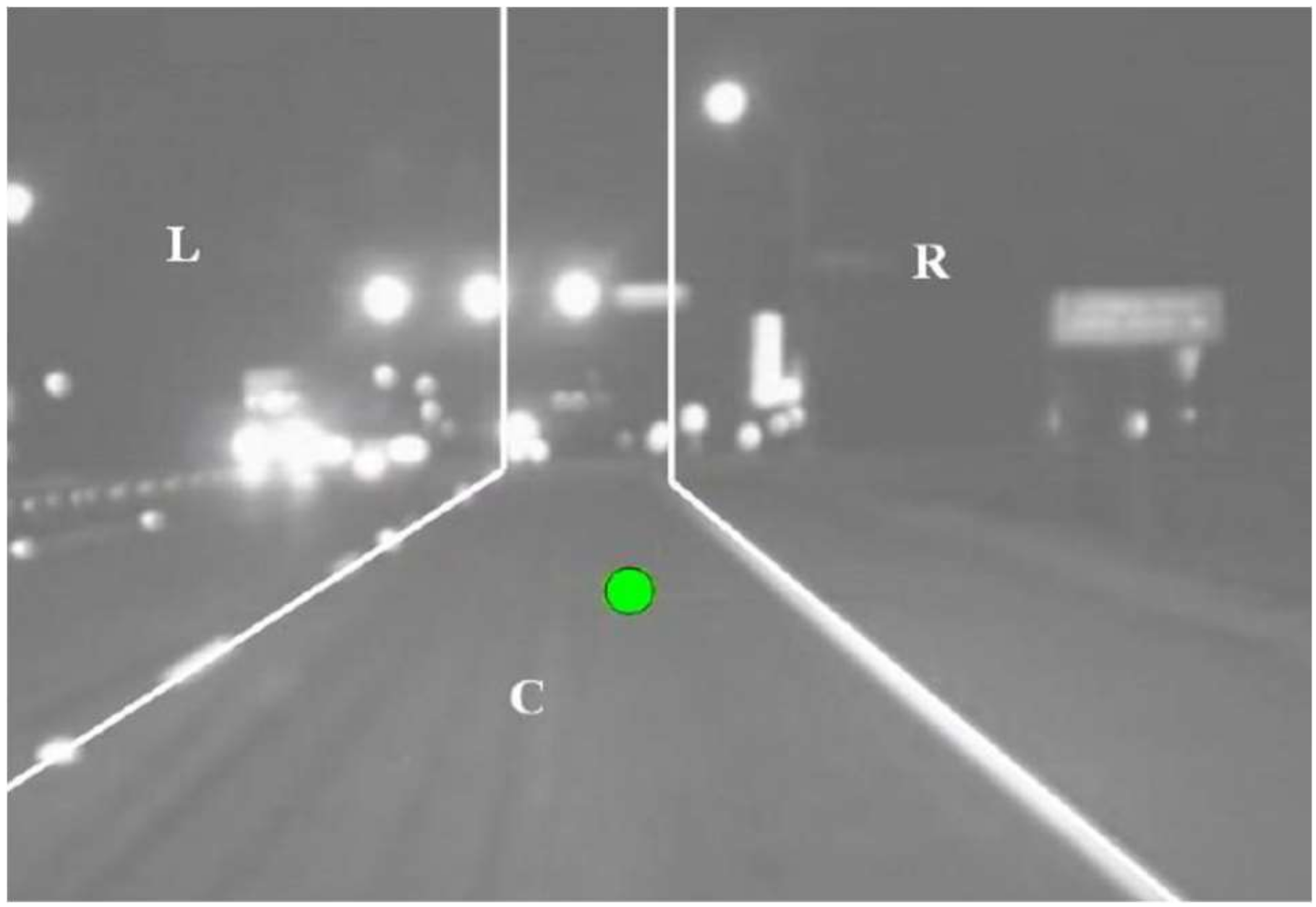
15] on the number and duration of fixations, and the points focused by drivers approaching a road intersection were considered. Higgins [
15] divided the scenario approaching unsignalized intersections into 4 glance areas (
Figure 4):
left (L): this includes all lanes and objects on the left of the driver (i.e., left hand side pedestrians, left adjacent traffic, and left path of travel);
center (C): this includes the lane where the driver is moving and all frontal elements (i.e., adjacent to the signal and opposing traffic);
right (R): this includes all lanes and objects on the right of the driver (i.e., right adjacent traffic, right hand side pedestrians, and right path of travel);
off screen (O): this covers all zones not included in the examined glance areas.
For each area, at a different distance from the stop or yield bar, the number and duration of glances were considered. Having regard to [
11] and [
13,
15], a binary logistic regression model was adopted to describe the probability of a fixation, in a given glance area. The results from the statistical analysis allowed calculation of the average fixation duration and the average number of fixations for each glance area and considered maneuver (i.e., right turn, through, and left turn) in the examined intersections (
Table 1).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}