How to Mitigate Traffic Congestion Based on Improved Ant Colony Algorithm: A Case Study of a Congested Old Area of a Metropolis

Abstract
:1. Introduction
1.1. Research Background
1.2. Review of Road Transportation Planning Theory
1.3. Review of Ant Colony Algorithm
1.4. Review of Existing Literature
2. Improved ant colony algorithm
2.1. Basic Principles of Ant Colony Algorithm
2.2. Improve Transition Rules
2.3. Improve Pheromone Rule
2.4. Pheromone Update Operator
2.5. Global Update Rule
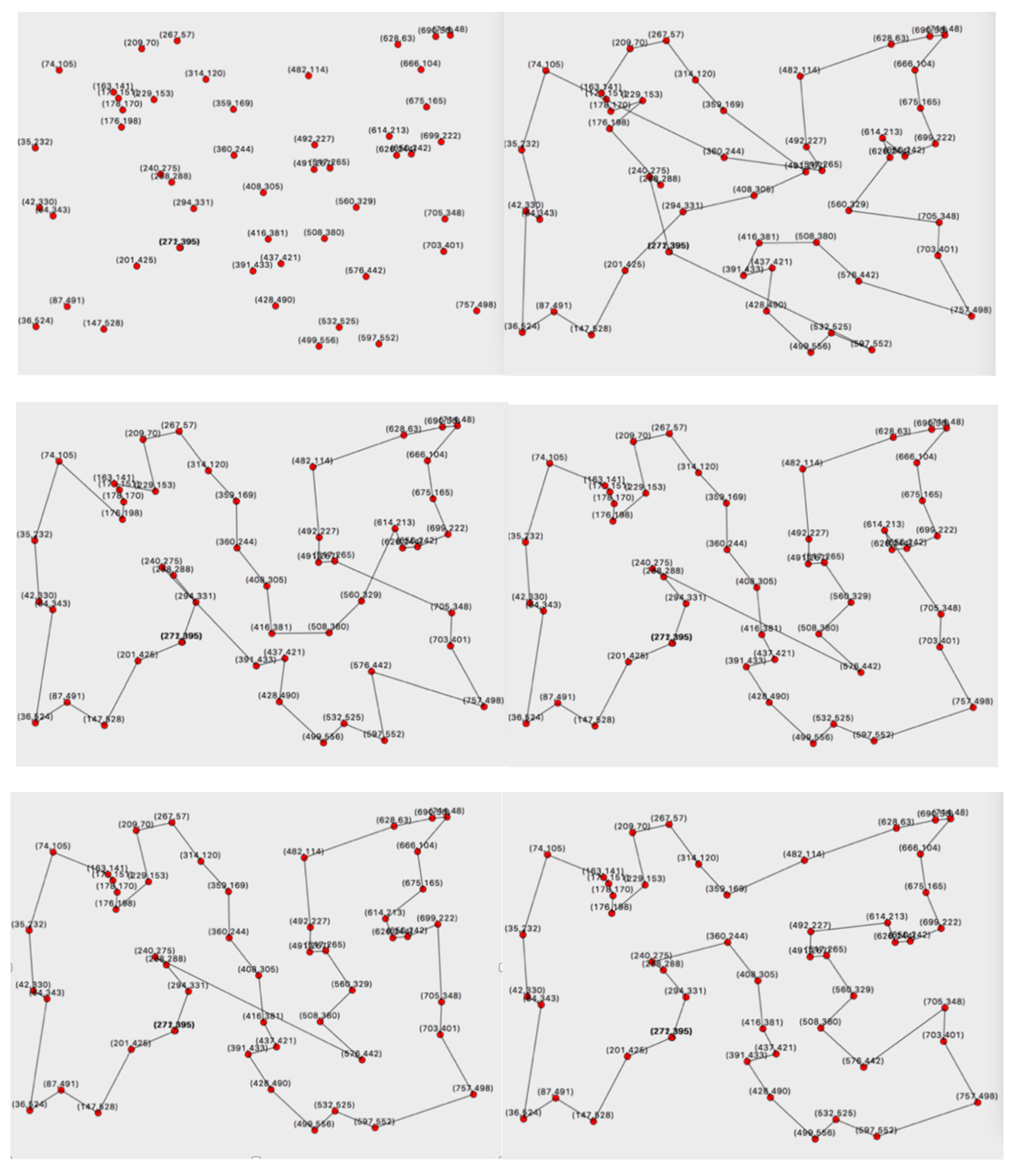
2.6. Application of Ant Colony Algorithm
3. Improved Ant Colony Algorithm and Traffic Flow Simulation
3.1. Algorithm Design Principle
3.2. Simulation Model
4. Model Test
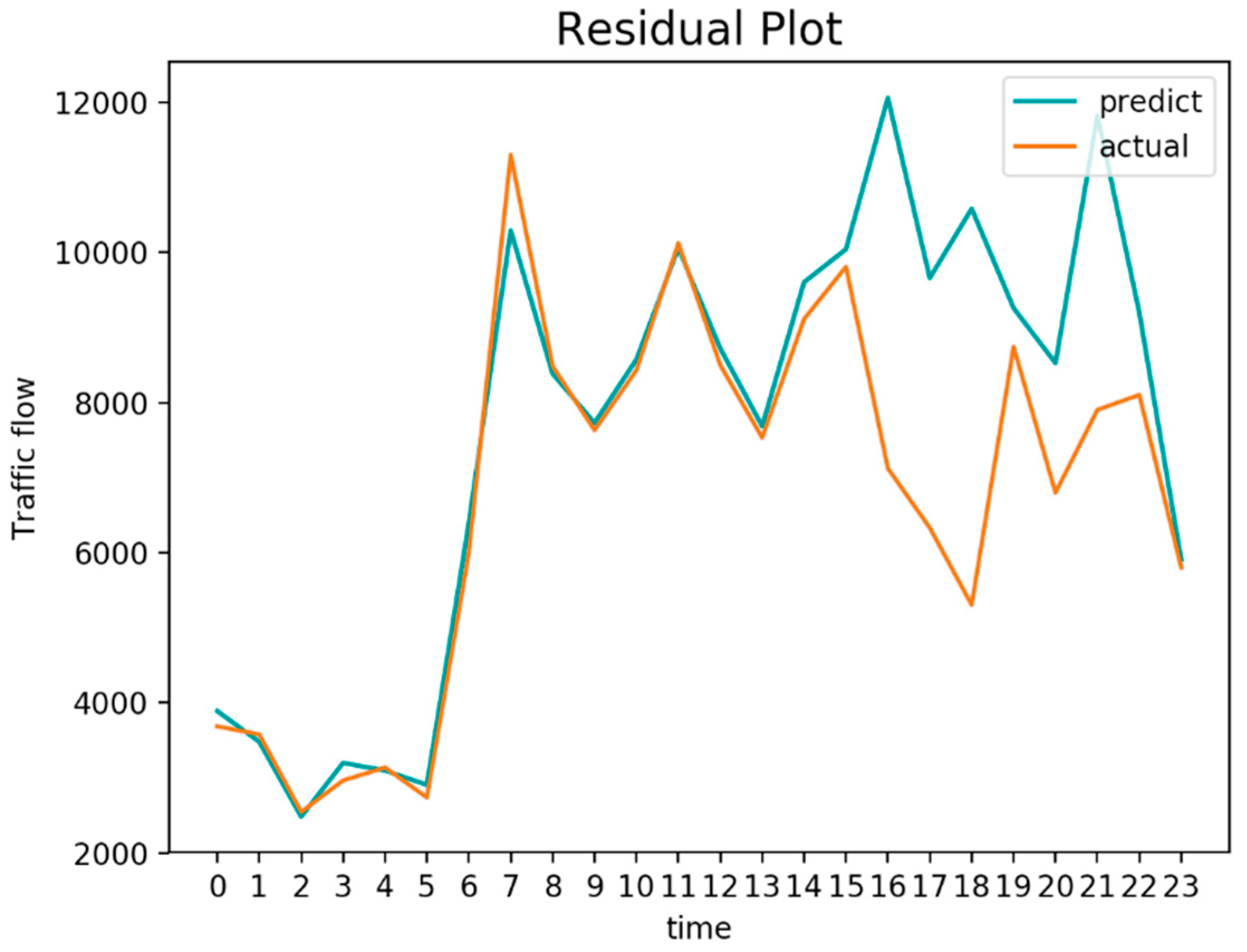
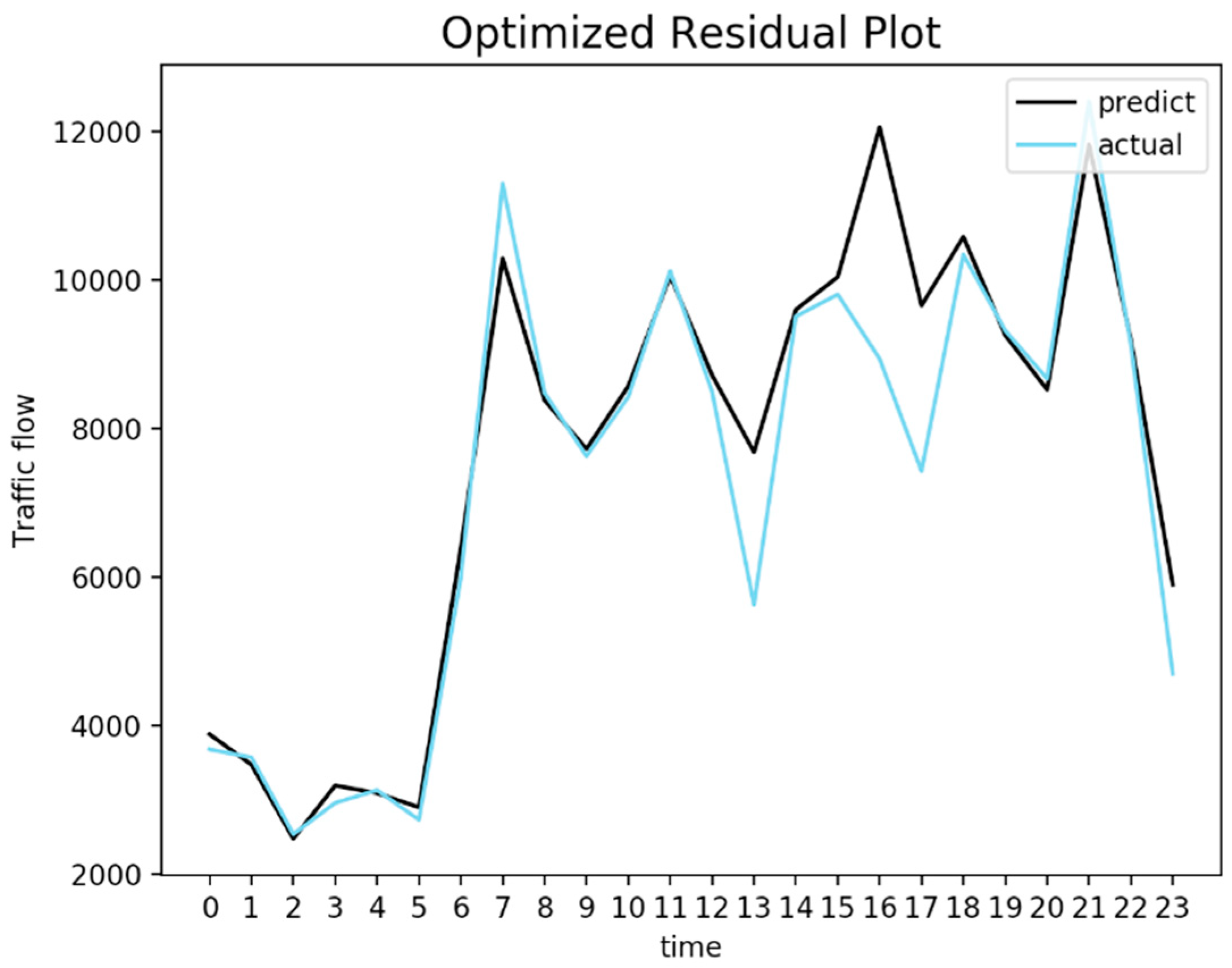
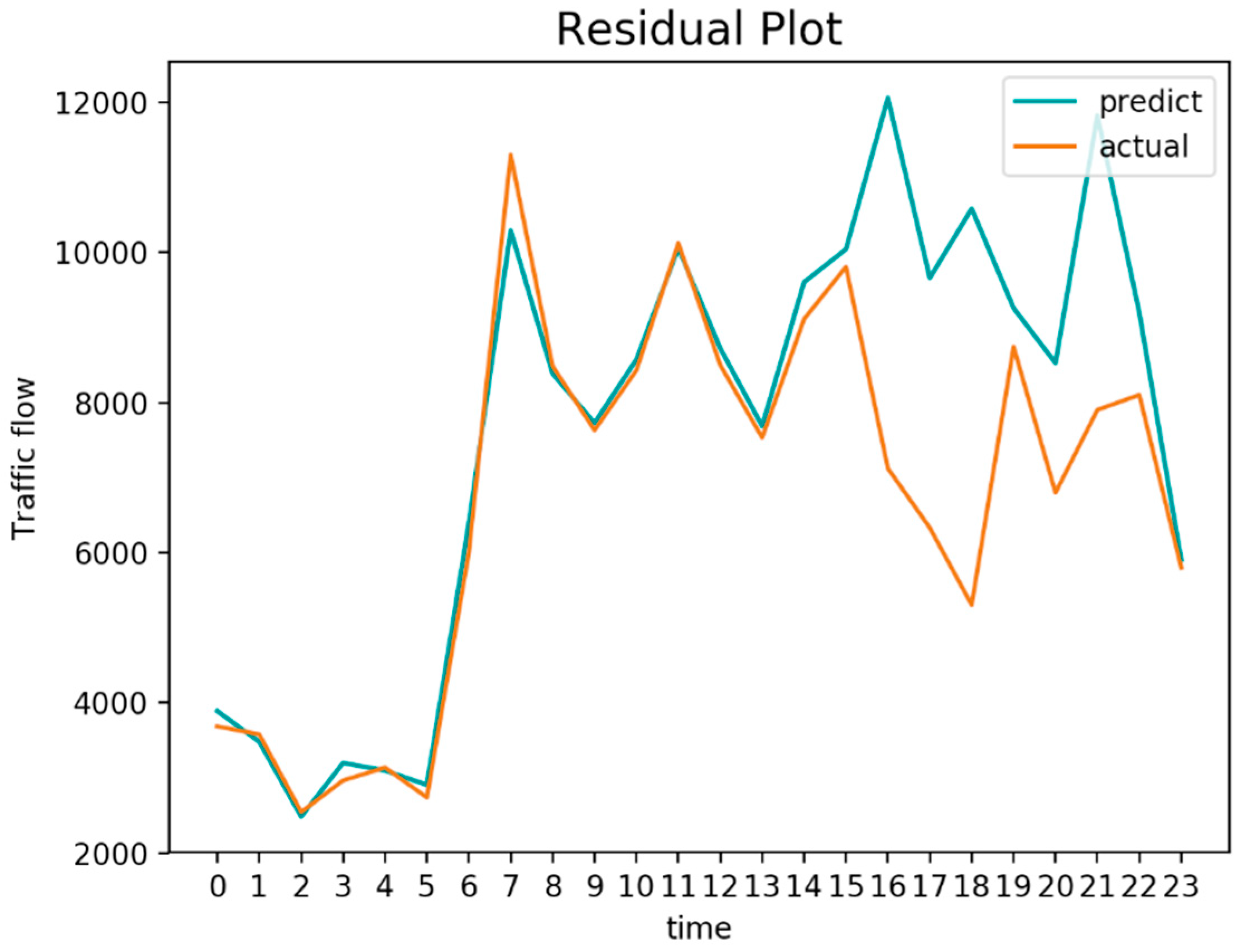
4.1. Robustness Test
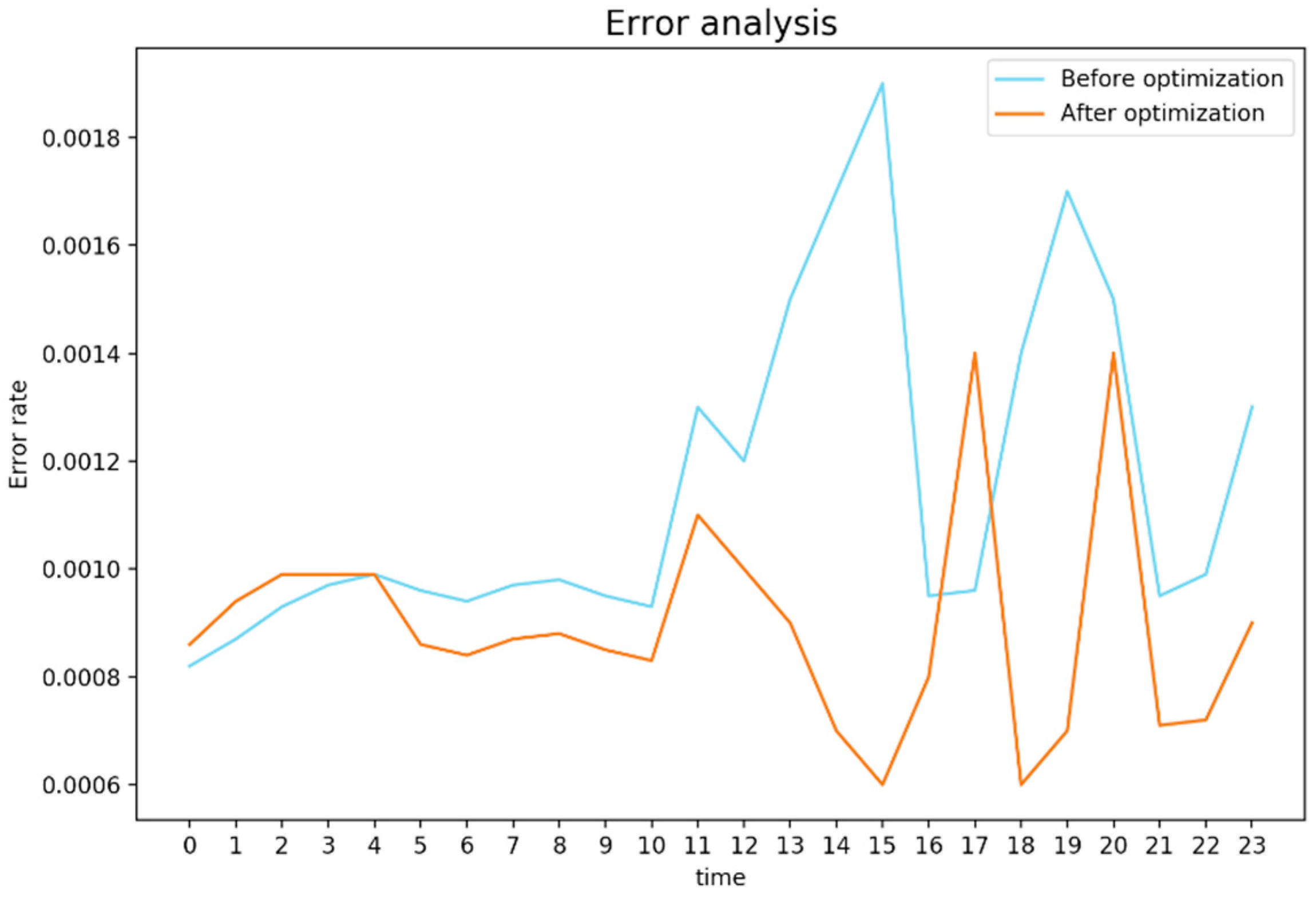
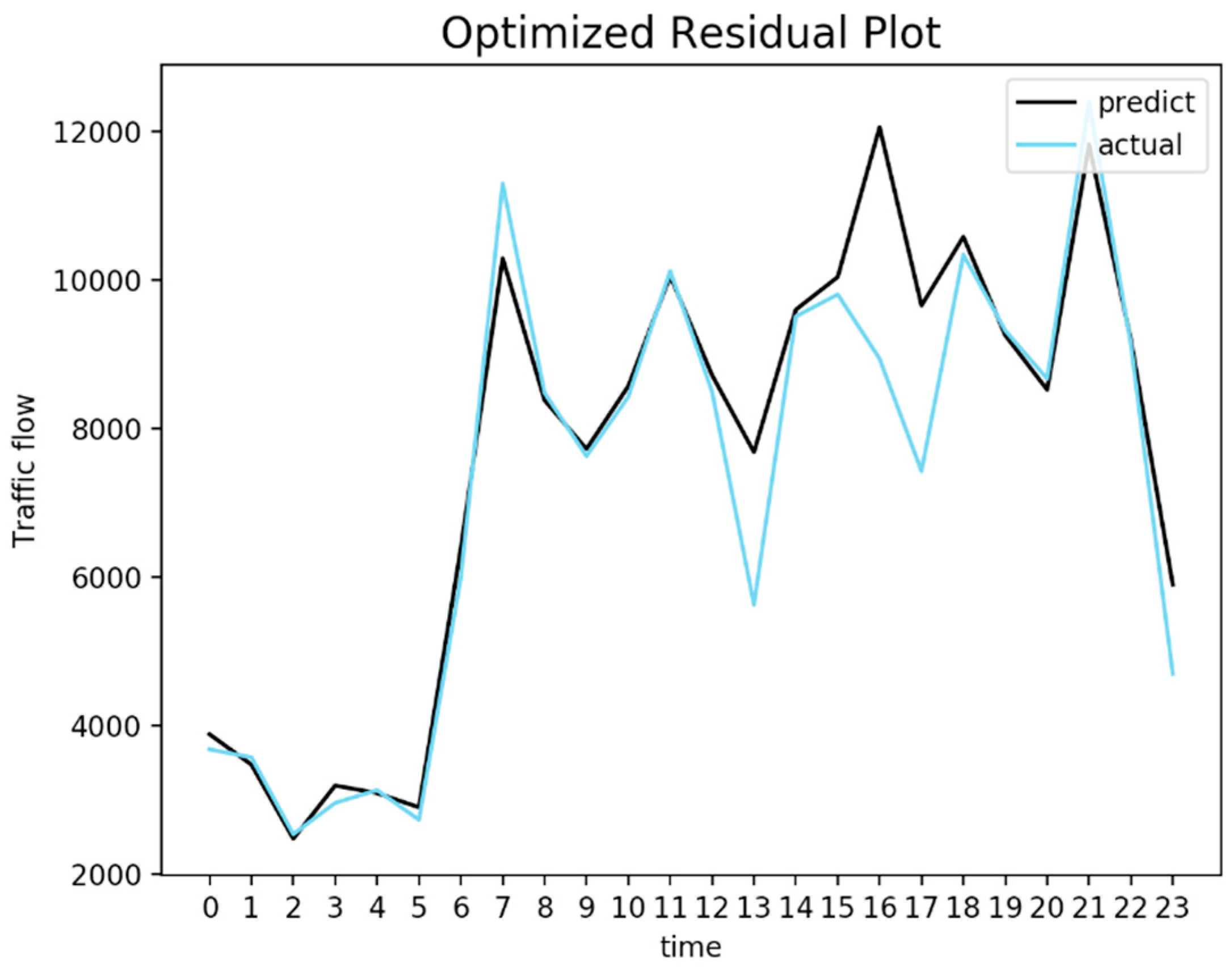
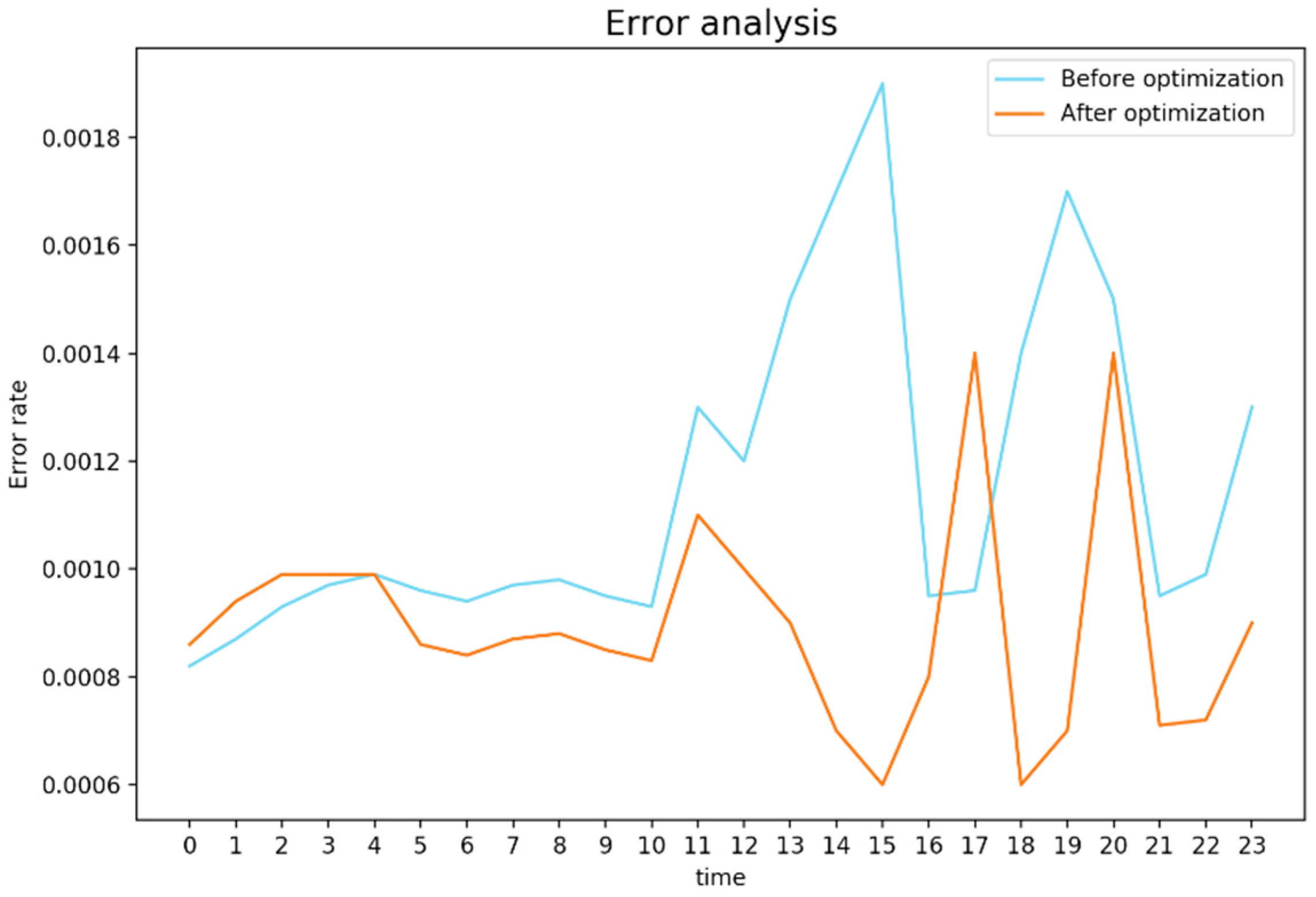
4.2. Error Analysis and Improvement
5. Discussions and Conclusion
5.1. Main Findings of This Study
5.2. Implications of This Study
5.3. Limitations of This Study
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Woods, R.I.; Woodward, J. Urban Disease and Mortality: In Nineteenth-Century England; B.T. Batsford Ltd Publishers: London, UK, 1984. [Google Scholar]
- Bixler, E.O.; Kales, A.; Soldatos, C.R.; Kales, J.D.; Healey, S. Prevalence of sleep disorders in the Los Angeles metropolitan area. Amer. J. psych. 1979, 136, 1257–1262. [Google Scholar]
- Mercer, A. Urban Disease and Mortality in Nineteenth Century England. J. Popu. Stud. 1986, 40, 181–183. [Google Scholar]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035. [Google Scholar] [CrossRef]
- Yan, X.; Ma, Y.; Cui, X. The Transport Characteristics and Traffic Organization in the Guangzhou CBD. City Plan. Rev. 2002, 3, 020. [Google Scholar]
- Zeng, D.; Zhang, P.; Sun, W. Analysis of Traffic Problems in Old Cities and Countermeasures––A Case Study of Old City in Nanning. Trans. Standard. 2011. [Google Scholar] [CrossRef]
- Arnott, R.; Inci, E. An integrated model of downtown parking and traffic congestion. J. Urban Econ. 2005, 60, 418–442. [Google Scholar] [CrossRef]
- Kerner, B.S. Three-phase traffic theory and highway capacity. Phys. A Statis. Mechanic. Appl. 2002, 333, 379–440. [Google Scholar] [CrossRef]
- Flaherty, C.A. Highways. Volume 1. Traffic Planning and Engineering, 3rd ed.; Edward Arnold: Baltimore, MD, USA, 1986. [Google Scholar]
- Anonymous. Texas Lawmakers Offer Second Transport Bill. Transport Topics. 2007. Available online: http://gateway.proquest.com/openurl?res_dat=xri:pqm&ctx_ver=Z39.88-2004&rfr_id=info:xri/sid:baidu&rft_val_fmt=info:ofi/fmt:kev:mtx:article&genre=article&jtitle=Transport%20Topics&atitle=Texas%20Lawmakers%20Offer%20Second%20Transport%20Bill (accessed on 9 November 2018).
- Green, M.C.; Brock, T.C. The role of transportation in the persuasiveness of public narratives. J. Pers. Soc. Psychol. 2000, 79, 701. [Google Scholar] [CrossRef] [PubMed]
- Maerivoet, S.; Moor, B.D. Transportation Planning and Traffic Flow Models. arXiv, 2005; arXiv:physics/0507127. [Google Scholar]
- Saad-Sulonen, J.; Botero, A.; Kuutti, K. A long-term strategy for designing (in) the wild: lessons from the urban mediator and traffic planning in Helsinki. Available online: http://thirdsector.mlog.taik.fi/files/2013/10/Saad-Sulonen_Botero_Kuutti_AuthorVersion.pdf (accessed on 26 October 2018).
- Rosini, M.D. Non-equilibrium Traffic Models. Macroscopic Models for Vehicular Flows and Crowd Dynamics: Theory and Applications; Springer: Berlin, Germany, 2013. [Google Scholar]
- Li, Z.; Jia, R.; Huang, J. The simulation model on delay time of road accessibility based on intelligent traffic control system. Cluster Comput. 2018. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Rajendran, C.; Ziegler, H. Ant-colony algorithms for permutation flowshop scheduling to minimize makespan/total flowtime of jobs. Eur. J. Oper. Res. 2007, 155, 426–438. [Google Scholar] [CrossRef]
- Maniezzo, V.; Dorigo, M.; Colorni, A. Algodesk: An experimental comparison of eight evolutionary heuristics applied to the Quadratic Assignment Problem. Eur. J. Oper. Res. 2007, 81, 188–204. [Google Scholar] [CrossRef]
- Bullnheimer, B.; Hartl, R.F.; Strauss, C. Applying the ANT System to the Vehicle Routing Problem; Springer: New York, NY, USA, 1999; pp. 285–296. [Google Scholar]
- Dorigo, M.; Gambardella, L.M. Ant Colony System: A cooperative learning approach to the traveling salesman problem. IEEE T. Evolut. Comput. 1996, 1, 53–66. [Google Scholar] [CrossRef]
- Dong, S.; Liu, Z.; Wang, X.; Zhao, X. Model and simulation of cyanobacterial bloom outbreak process based on intelligent agent. J. China Garment 2012, 11, 412–417. [Google Scholar]
- Shelokar, P.S.; Siarry, P.; Jayaraman, V.K.; Kulkarni, B.D. Particle swarm and ant colony algorithms hybridized for improved continuous optimization. Appl. Math. Comput. 2007, 188, 129–142. [Google Scholar] [CrossRef]
- Jadon, R.S.; Datta, U. Modified ant colony optimization algorithm with uniform mutation using self-adaptive approach for travelling salesman problem. In Proceedings of the Fourth International Conference on Computing, Tiruchengode, India, 4–6 July 2013; IEEE: Piscatville, NJ, USA, 2014. [Google Scholar]
- Gajpal, Y.; Rajendran, C.; Ziegler, H. An ant colony algorithm for scheduling in flowshops with sequence-dependent setup times of jobs. Int. J. Adv. Manuf. Tech. 2006, 30, 416–424. [Google Scholar] [CrossRef]
- Fattahi, P.; Roshani, A.; Roshani, A. A mathematical model and ant colony algorithm for multi-manned assembly line balancing problem. Int. J. Adv. Manuf. Tech. 2011, 53, 363–378. [Google Scholar] [CrossRef]
- Tfaili, W.; Siarry, P. A new charged ant colony algorithm for continuous dynamic optimization. Appl. Math. Comput. 2008, 197, 604–613. [Google Scholar] [CrossRef]
- Baskar, N.; Saravanan, R.; Asokan, P.; Prabhaharan, G. Ants colony algorithm approach for multi-objective optimisation of surface grinding operations. Int. J. Adv. Manuf. Tech. 2004, 23, 311–317. [Google Scholar] [CrossRef]
- Ahmadizar, F. A new ant colony algorithm for makespan minimization in permutation flow shops. Comput. Ind. Eng. 2012, 63, 355–361. [Google Scholar] [CrossRef]
- Holthaus, O.; Rajendran, C. A fast ant-colony algorithm for single-machine scheduling to minimize the sum of weighted tardiness of jobs. J. Opera. Res. Soc. 2005, 56, 947–953. [Google Scholar] [CrossRef]
- Robbins, K.R.; Zhang, W.; Bertrand, J.K.; Rekaya, R. The ant colony algorithm for feature selection in high-dimension gene expression data for disease classification. Math. Med. Bio. A J. Ima 2007, 24, 413. [Google Scholar] [CrossRef] [PubMed]
- Niknam, T.; Ranjbar, A.M.; Shirani, A.R. A new approach for distribution state estimation based on ant colony algorithm with regard to distributed generation. J. Intell. Fuzzy Syst. 2005, 16, 119–131. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Time /h | Unit cost | Accident rate |
| Ant colony algorithm | 5.792 | 371 | 10-4 |
| Improved ant colony algorithm | 2.311 | 26 | 10-5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Huang, J. How to Mitigate Traffic Congestion Based on Improved Ant Colony Algorithm: A Case Study of a Congested Old Area of a Metropolis. Sustainability 2019, 11, 1140. https://doi.org/10.3390/su11041140
Li Z, Huang J. How to Mitigate Traffic Congestion Based on Improved Ant Colony Algorithm: A Case Study of a Congested Old Area of a Metropolis. Sustainability. 2019; 11(4):1140. https://doi.org/10.3390/su11041140
Chicago/Turabian StyleLi, Zhichao, and Jilin Huang. 2019. "How to Mitigate Traffic Congestion Based on Improved Ant Colony Algorithm: A Case Study of a Congested Old Area of a Metropolis" Sustainability 11, no. 4: 1140. https://doi.org/10.3390/su11041140
APA StyleLi, Z., & Huang, J. (2019). How to Mitigate Traffic Congestion Based on Improved Ant Colony Algorithm: A Case Study of a Congested Old Area of a Metropolis. Sustainability, 11(4), 1140. https://doi.org/10.3390/su11041140