1. Introduction
Automatic load frequency control (ALFC) plays a significant role in modern power systems to exchange scheduled power between the interconnected areas through tie-lines with minimum steady-state errors of frequency deviation and tie-line power variations. Thus, the frequency of the system is maintained within the standard limit of ±5% deviation for change in the load demand of the system with appropriate designed controllers. Many researchers have investigated conventional classical controllers such as proportional–integral (PI), proportional–integral–derivative (PID), proportional–derivative (PD), integral (I), integral–derivative (ID), and integral–double-derivative (IDD) [
1,
2] for ALFC application. The investigation of these controllers reveals that the design model majorly depends on the mathematical modeling and their performances are not superior for dynamic behavior of the system like nonlinearities of generator rate constraint (GRC) and governor dead-band (GDB) [
3]. On the other hand, numerous control schemes such as variable structure control [
4], internal model control (IMC) [
5], linear matrix inequality (LMI) techniques, fractional-order (FO) control, robust control schemes such as
H2/
H∞ control technique, sliding mode control (SMC), and model predictive control (MPC), etc., have been applied [
6,
7,
8,
9] for the ALFC problem. The results indicate that the design of these aforementioned controllers requires high mathematical skills to obtain the control law. Moreover, the increase in the complexity of advanced power systems requires a simple control scheme for ALFC application using intelligent control method [
10].
Computational intelligence plays a major role in various processes and control domains for minimizing the error of the plant by optimally designing the controller parameters. In many industrial applications, the PID controller has been widely used rather than other control schemes as portrayed in the literature. One of the major challenges with this controller is optimizing the controller gains such as
Kp,
Ki, and
Kd for improving the dynamic and steady-state responses of the system. This can be achieved using the various intelligent techniques for tuning the parameters of the controller by minimizing the steady-state error of the system. The design of fuzzy, artificial neural network (ANN) and adaptive neuro-fuzzy inference system (ANFIS) based control schemes requires considerable time to frame the rules and also to train the network [
11,
12]. Therefore, to overcome this problem many researchers used the diverse heuristic optimization techniques for the ALFC problem.
The different evolutionary optimization algorithms such as genetic algorithm (GA), particle swarm optimization (PSO), artificial bee colony, (ABC), gravitational search algorithm (GSA), firefly algorithm (FA), bacterial foraging optimization (BFOA), craziness-based PSO (CPSO), bat algorithm (BA), teaching learning-based optimization (TLBO), differential evolution (DE),cuckoo search (CS), etc., are used to tune the gains of the PID controller for ALFC application [
13,
14,
15]. The control gains obtained from the aforementioned algorithms fail to reduce the system error, when the system is associated with large dynamics. This paves the way for intensive research on a meta-heuristic algorithm to improve the efficiency in obtaining the global optimal solution, by integrating the exploration and exploitation characteristics of the various optimization methods. Exploration is the searching ability of the algorithm in a search region to reach the local minimum. Exploitation is the ability to obtain a global best solution. Hence, hybrid meta-heuristic methods of optimization were developed for different applications. PSO-based hybrid algorithms are widely used as they are simple and have the ability to obtain global optimum with a faster convergence rate [
16,
17,
18]. Several hybrid algorithms such as PSO–GA and PSO–DE are aimed at reducing the likelihood of reaching a local solution. On the other hand, the PSO-GSA-based hybrid optimization proposed by Mirjalili S et.al reaches the globally optimized solution at faster convergence rate for many optimization problems [
16]. Therefore, in this proposed work a hybrid PSO-GSA-based technique is used to tune the gains of PID controller for ALFC of two-area dynamic interconnected power system (TAIPS). The proposed method of tuning of controller enhances the system dynamic response, i.e., sudden change in the load demand.
This paper is structured as follows:
Section 2 and
Section 3 portray the model of the multi-area power system and various control schemes, respectively.
Section 4 describes the simulation results of the proposed controller for TAIPS and compares it with conventional control schemes.
Section 5 deals with the validation of simulation results using hardware-in-the-loop (HIL) real-time digital simulator environment.
Section 6 and
Section 7 elucidate the comparative analysis and concluding remarks of the proposed work respectively.
3. Control Schemes
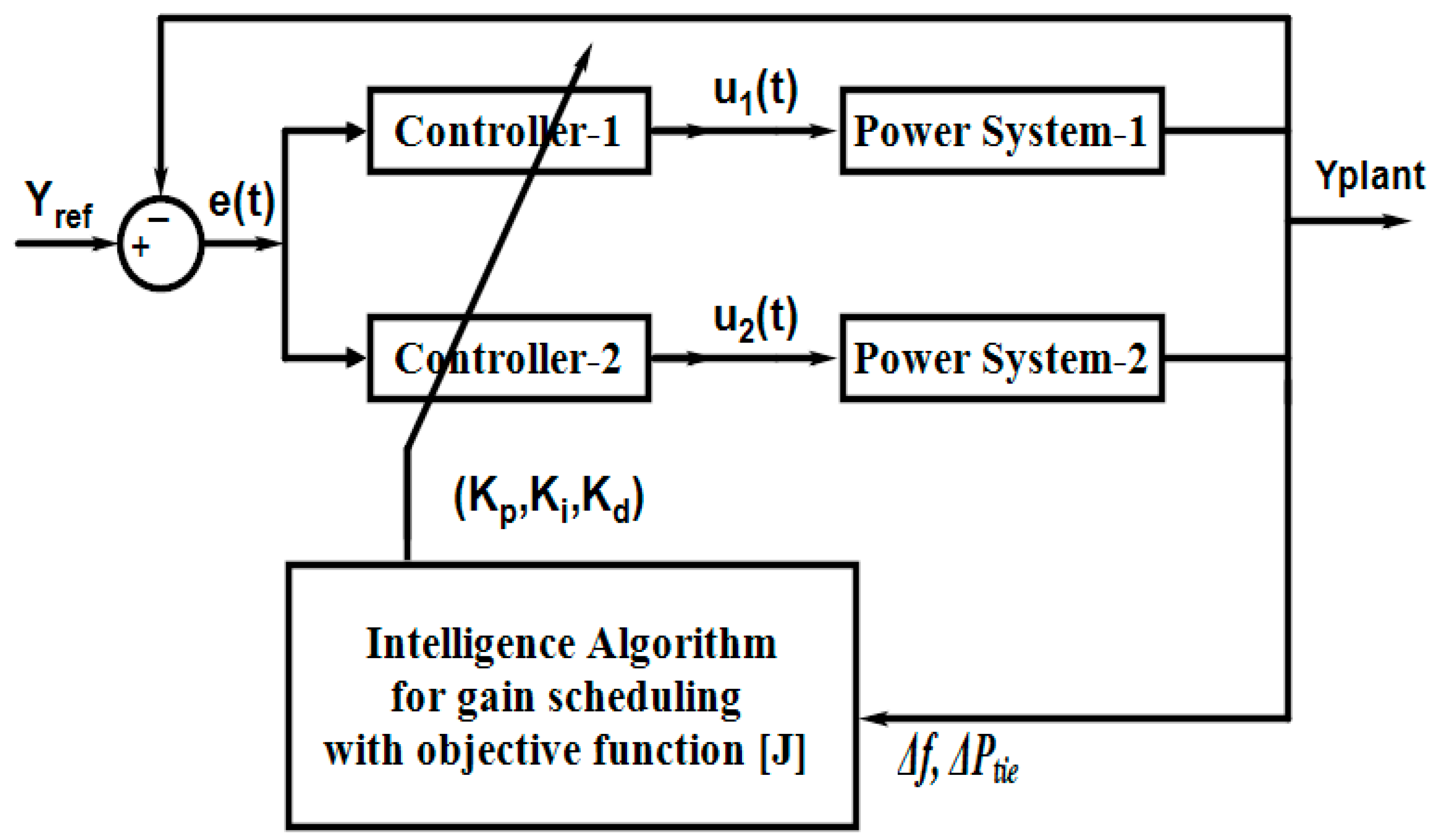
The closed-loop two-area interconnected power system with PID controller tuned through intelligent algorithms is shown in
Figure 2.
Where Yref is the set value of the plant, Yplant is the actual output of the plant, such that Yplant = T {u(t)} and T is the transformation operation performed by the system on u(t) to give the output Yplant.
The output of the PID controller of the two-area system is as follows:
In this work, the gains of the PID controller are tuned by minimizing the steady-state error indices such as IAE as given below,
Thus, the objective function for tuning the parameters of the PID controller is given by,
Upon simplifying the above expression we get,
Subjected to the following inequality constraints:
The obtained gain values of the PID controller using different approaches like the Ziegler-Nichols (Z-N) method and different computational intelligence techniques such as PSO, GSA, and PSO-GSA method presented in forthcoming sections are given in
Table 1. The upper and lower bounds of inequality constraints are obtained through the Z-N method.
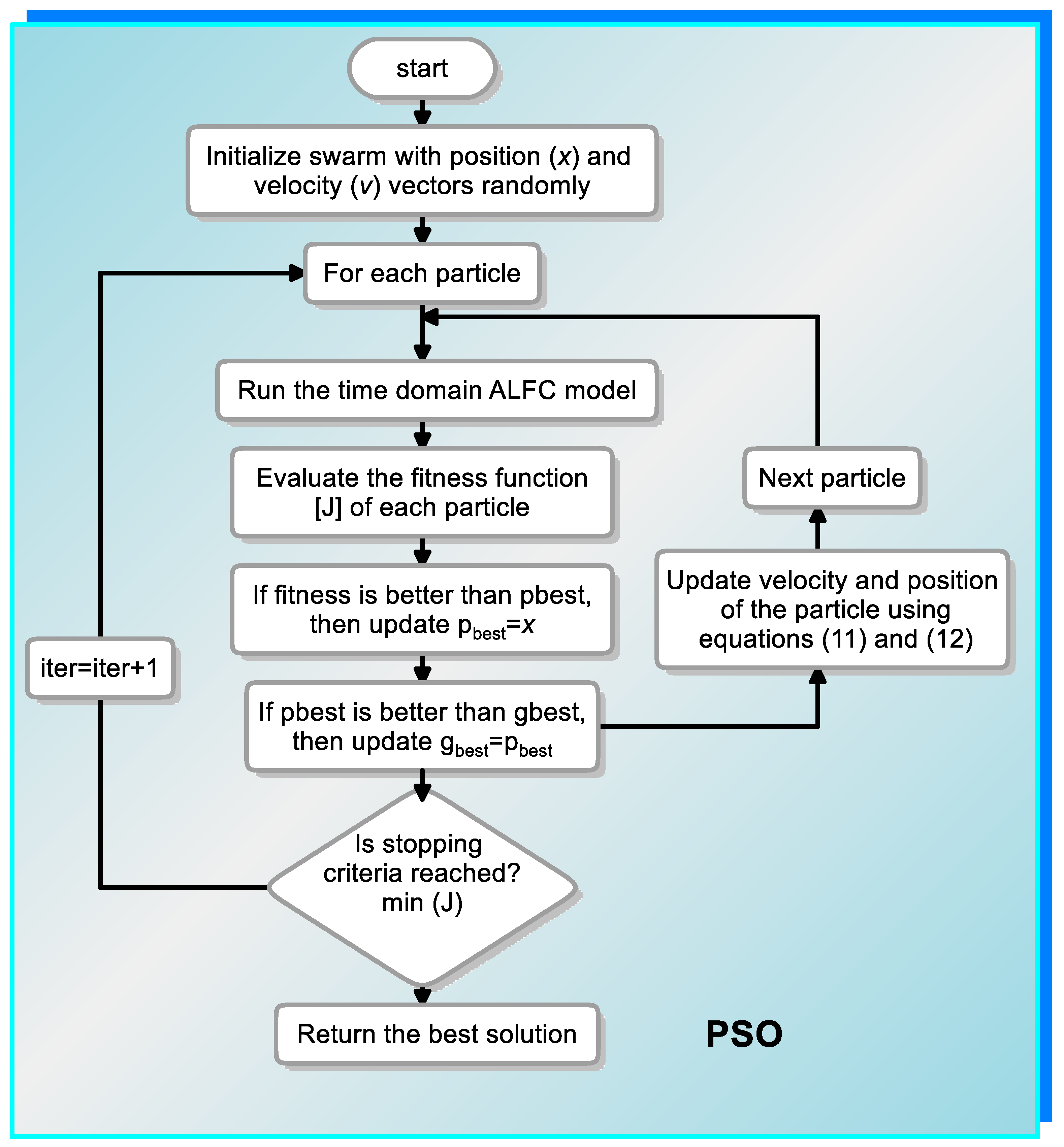
3.1. PSO-Tuned PID Controller
This section describes the tuning of the PID controller using the particle swarm optimization (PSO) algorithm. It is a meta-heuristic approach based on the movement and position of swarm. PSO-based optimization is more effective in the case of a system with multi-objective. In PSO, each particle is referred to as a swarm and these swarms accelerate towards the best solution by combining the local and global search methods, which results in minimizing the fitness function as defined in (6). Initially, the particle is generated randomly and it is represented with the position and velocity vector as depicted in (11) and (12),
where
is the velocity of the
kth particle at the current iteration and
at the previous iteration,
w is the weight factor,
c1 and
c2 are the cognitive and social coefficients, respectively, which determine the convergence of the method,
r1 and
r2 are random numbers varying between 0 and 1.
pbest is the local best and
gbest is the global best among all
pbest solutions obtained.
is the position of the particle at
ith iteration [
20]. The position and velocity vectors are updated in every iteration to minimize the objective function which leads to the optimal solution. The initial parameters for tuning the gains of the PID controller are maximum iteration = 100, population size = 100, inertia weight
w = 1,
c1 = 1.5,
c2 = 2, upper bound= −0.01, and lower bound = −15. The procedure for tuning the controller using PSO is given in the form of flowchart as portrayed in
Figure 3 and the obtained gain values of controller are given in
Table 1.
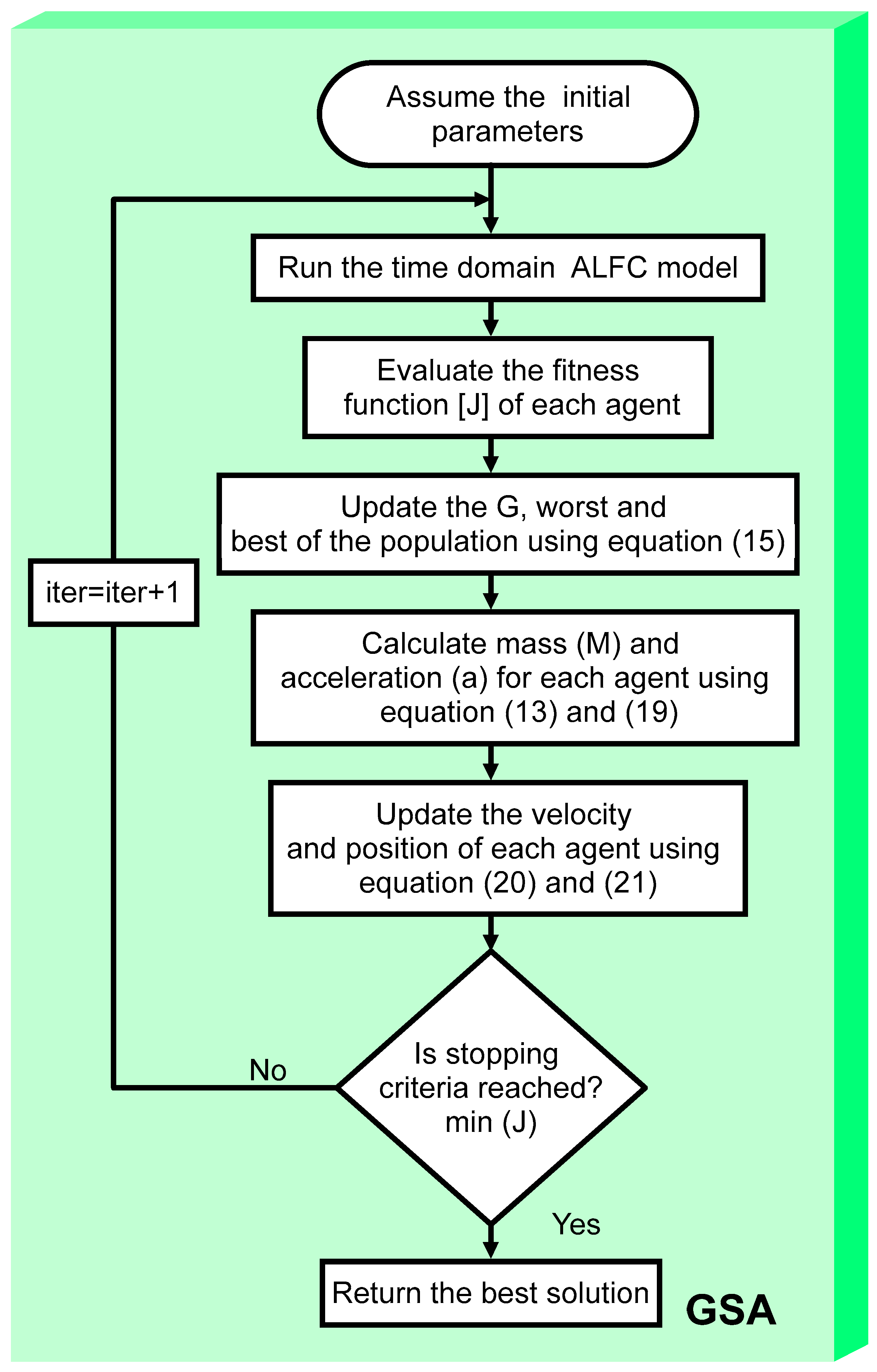
3.2. GSA-Tuned PID Controller
The gravitational search algorithm (GSA) is a heuristic method based on Newton’s universal law of gravity and motion. Here, each agent (
) is considered as an object and their performances are represented by their masses. Each object is attracted by other objects due to the force of gravity, which results in all the objects being attracted in line with the objects with huge mass. Thus, the masses and appropriateness of the solution of the object can be defined as,
where
qi(t), Mi(t), and
fiti(t) are the relative mass, mass, and calculated fitness value of the
ith agent corresponding to time t. The communication between objects is achieved through the gravitational force of attraction. The force is defined by
where,
is the active gravitational mass related to agent
j,
is the passive gravitational mass related to agent
i,
G(
t) is the gravitational constant at time
t, ∈ is small constant
and
are
ith and
jth positions of the agent.
Rij(t) is the euclidian distance between two agents
i and j given by
The gravitational constant
G(
t) is defined as
where
G0 is the initial value and
is the descending coefficient.
The total forces acting on the agent are
where rand
j is the random number belonging to [0,1]. The acceleration of
ith agent is given by
where
is the inertia mass of
ith agent.
The velocity and position of an agent is updated using
where
randi is the random number that belongs to [0,1].
The object with the heaviest mass gives the best solution and the one with lightest mass results in the worst solution. Thus, the position of the object gives the solution and every particle possesses mass, velocity, and acceleration [
17,
21]. The initial parameters for tuning are population size
P = 20, maximum number of iterations = 100, gravitational constant
G0 = 1 and α = 20, and upper bound = −0.01 and lower bound = −15. The detailed step by step procedure to find the optimal values of PID parameters is represented in
Figure 4 and the gain values drawn for the controller are given in
Table 1.
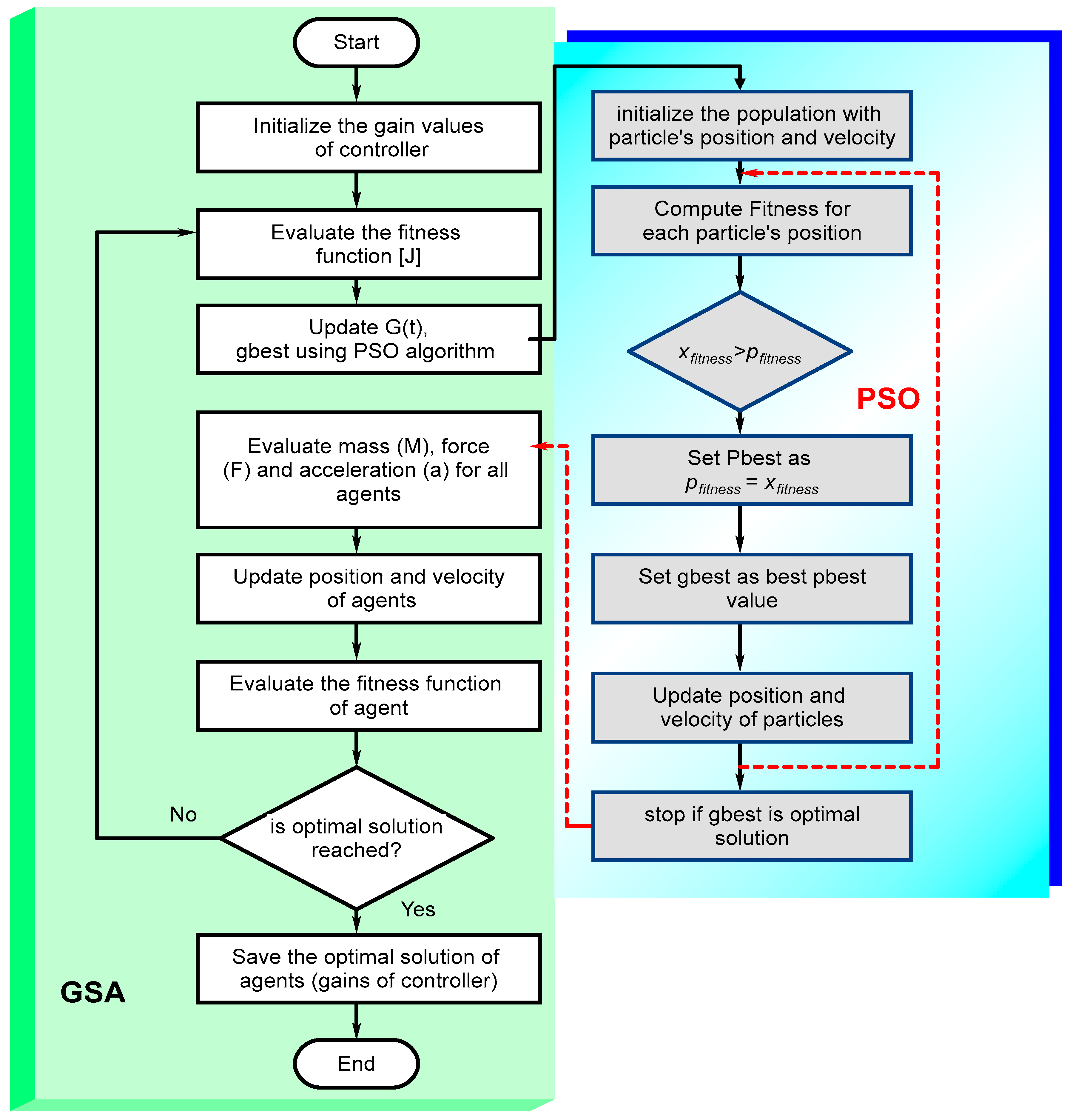
3.3. PSO-GSA-Based PID Controller
The hybrid particle swarm optimization-based gravitational search algorithm (PSO-GSA) for tuning the parameters of the PID controller is presented in this section. PSO-GSA is the co-evolutionary heterogeneous hybrid optimization method, because it combines the functionality of both PSO and GSA algorithm by running in parallel to find the best optimal solution.
The main idea of this approach is to integrate the ability of social thinking (gbest) in PSO with the local search ability of GSA. The local optimal solution is found using GSA and it is considered as pbest for which the velocity and position of agents are determined as per the PSO algorithm to obtain gbest. The modified velocity and position vector for the PSO-GSA algorithm are shown below [
16,
17,
22],
The parameters initialized for the proposed method are maximum iteration = 100, population size = 10, inertia weight w = [0,1],
c’1 = 0.5,
c’2 = 1.5, gravitational constant
G0 = 1, α = 20, and upper bound = −0.01 and lower bound = −15. The procedure for tuning the PID controller is presented in
Figure 5 and the obtained gain values are given in
Table 1.
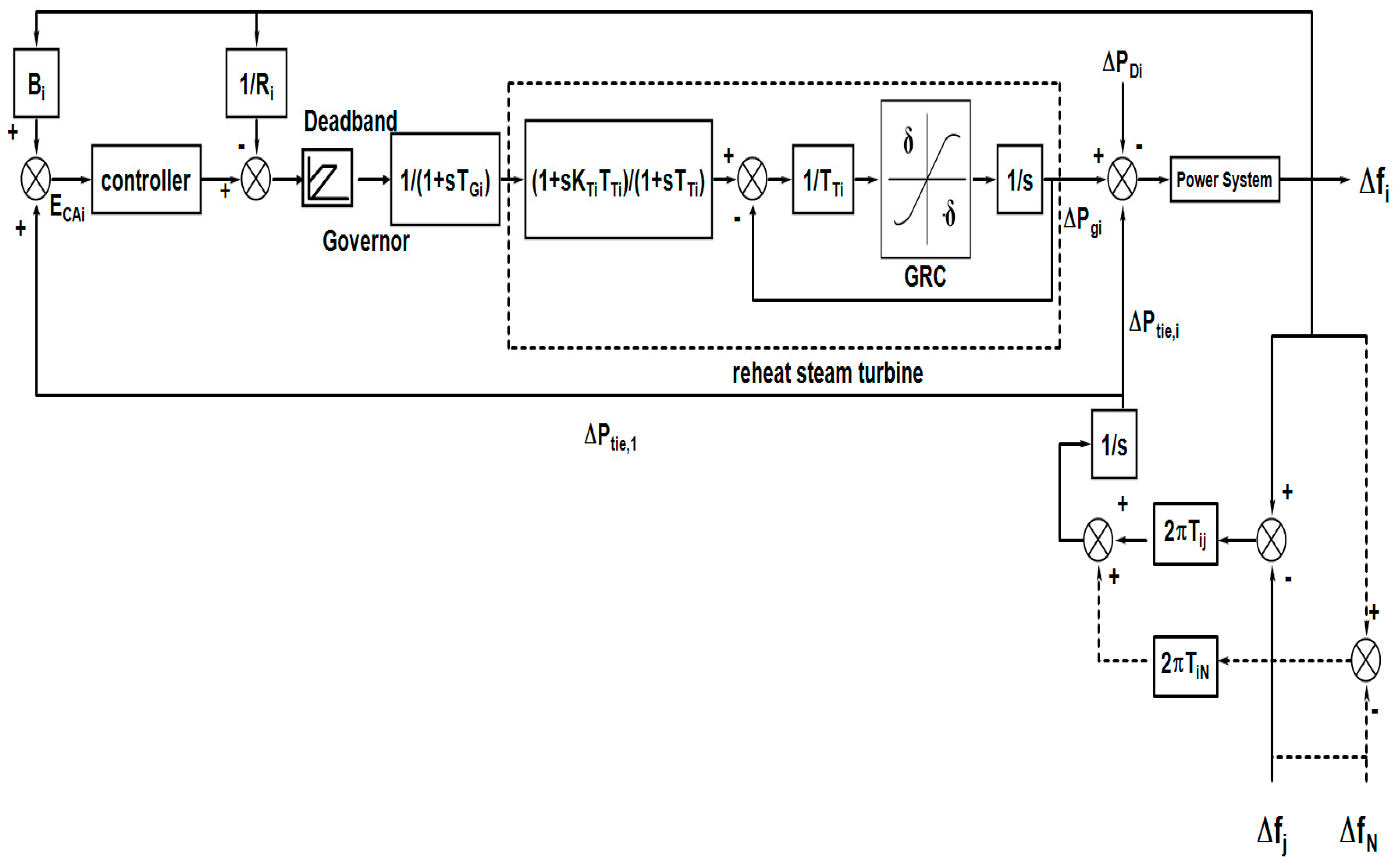
4. Results and Discussion
This section discusses the simulation results of TAIPS with reheat steam turbines; non-linearities such as GRC and GDB and their specifications are given in
Section 2. To study the effectiveness of the proposed hybrid PSO-GSA-tuned PID controller compared to other controllers, the system was analyzed with various disturbances such as change in load, variation, synchronizing power coefficient, and inertia constant because of the following reasons:
The power system is highly non-linear pertaining to system uncertainties such as generator outage, line outage, load outage, and so on. In a normal state, the power system is characterized by a constant frequency and voltage profile with certain system reliability. In actual practice, the system is subjected to load variations of random magnitude and duration. Moreover, the interconnected system is being divided into control areas connected by the tie-lines. All the generators are also assumed to form a coherent group for stable and reliable operation of the system. For the satisfactory operation of an interconnected system, the frequency should be maintained constantly. Thus, the frequency of a system depends on the active power balance. As frequency is a common factor, a change in load demand in one area is reflected throughout the system through its interlinked tie-lines. Because of these reasons, the developed controller robustness is tested for change in load demand in one area (case I-A) and also both the areas (case I-B).
On the flipside, one of the generators operating in the coherent group may fail for some reason (or) due to an increase in the load demand; the addition of a generation unit may also occur in the system. Due to this, the inertia (H) of the coherent group generators either decrease or increase and this governs the entire system inertia. Aside from the increase in the growth of renewable energies (REs) and their interconnection into the grid, the inertia of the system fluctuates. Therefore, the proposed study considers the change in load demand and inertia constant of the system as case II-A. On the other hand, the increase in the load demand, economic factors, and environmental hurdles make the existing transmission line to operate to its thermal limit which leads to an outage of interconnected tie-lines. The failure of one of the tie-lines in an interconnected system leads to a change in their synchronizing power coefficient. Therefore, the presented work studies the impact of change in synchronizing power coefficients of tie-line with the change in load demand as case II-B.
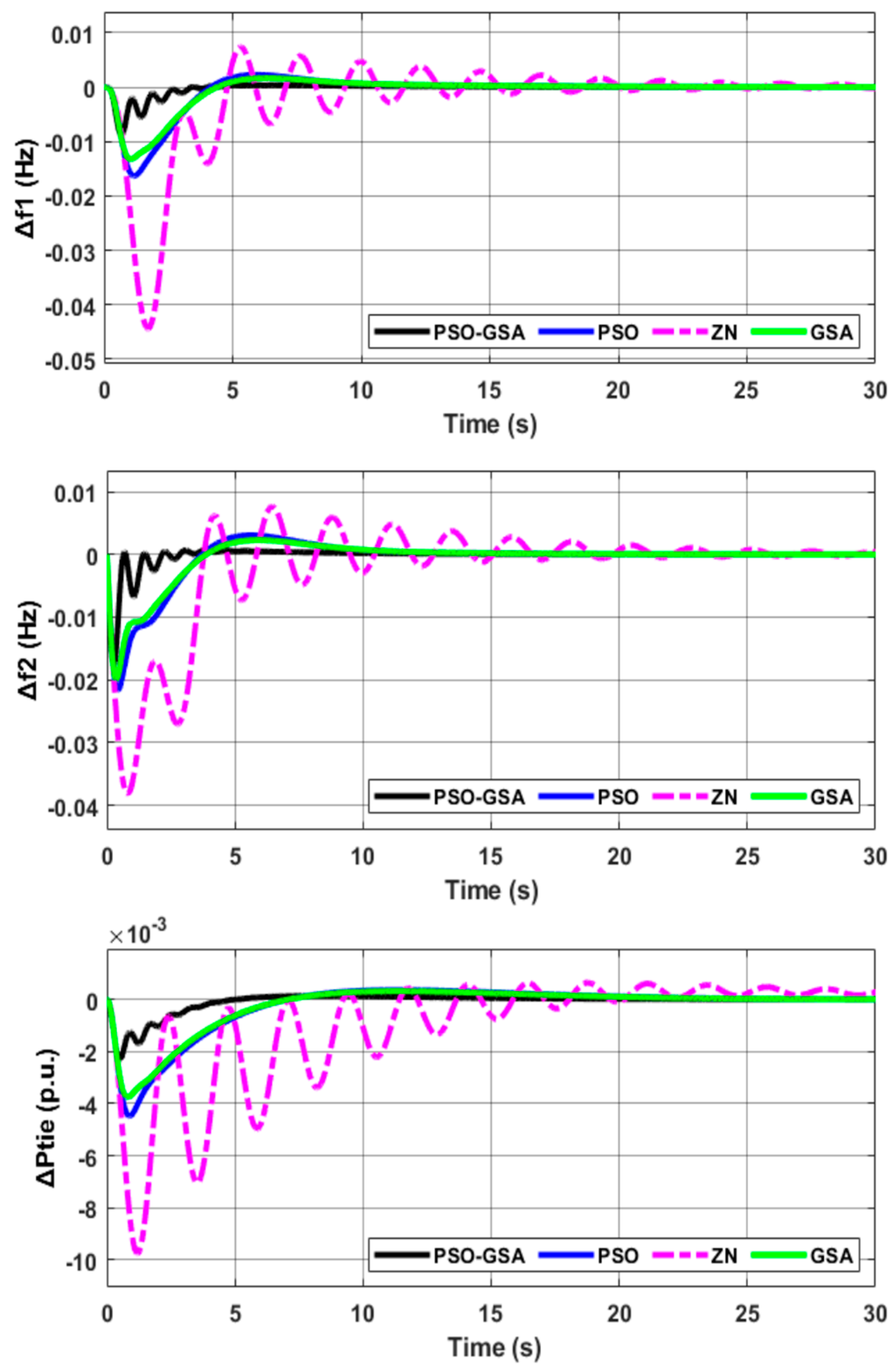
Case I-A: In this case, area-1 remains undisturbed and a step-change in the load demand of area-2 (ΔP
D2) equal to 25 MW was considered.
Figure 6 represents the frequency deviation for area-1 and area-2 and the inter-area tie-line power fluctuations. The results indicate that the frequency and tie-line power deviation converge to zero faster through the propounded PSO-GSA-tuned PID controller than the PID, PSO–PID, and GSA–PID controllers.
Table 2 and
Table 3 demonstrate that the steady-state performance indices such as IAE and ITAE were significantly decreased by the PSO-GSA-tuned PID controller compared to other controllers.
Table 4 and
Table 5 illustrate the transient performance indices such as settling time, rise time, peak time, and peak magnitude of Δ
f1 and Δ
f2, respectively. It is inferred from the results that the indices were substantially improved for the system with the PSO-GSA-tuned controller than other controllers. In addition, the response of the proposed controller was outstanding with minimum settling time and overshoot for the system.
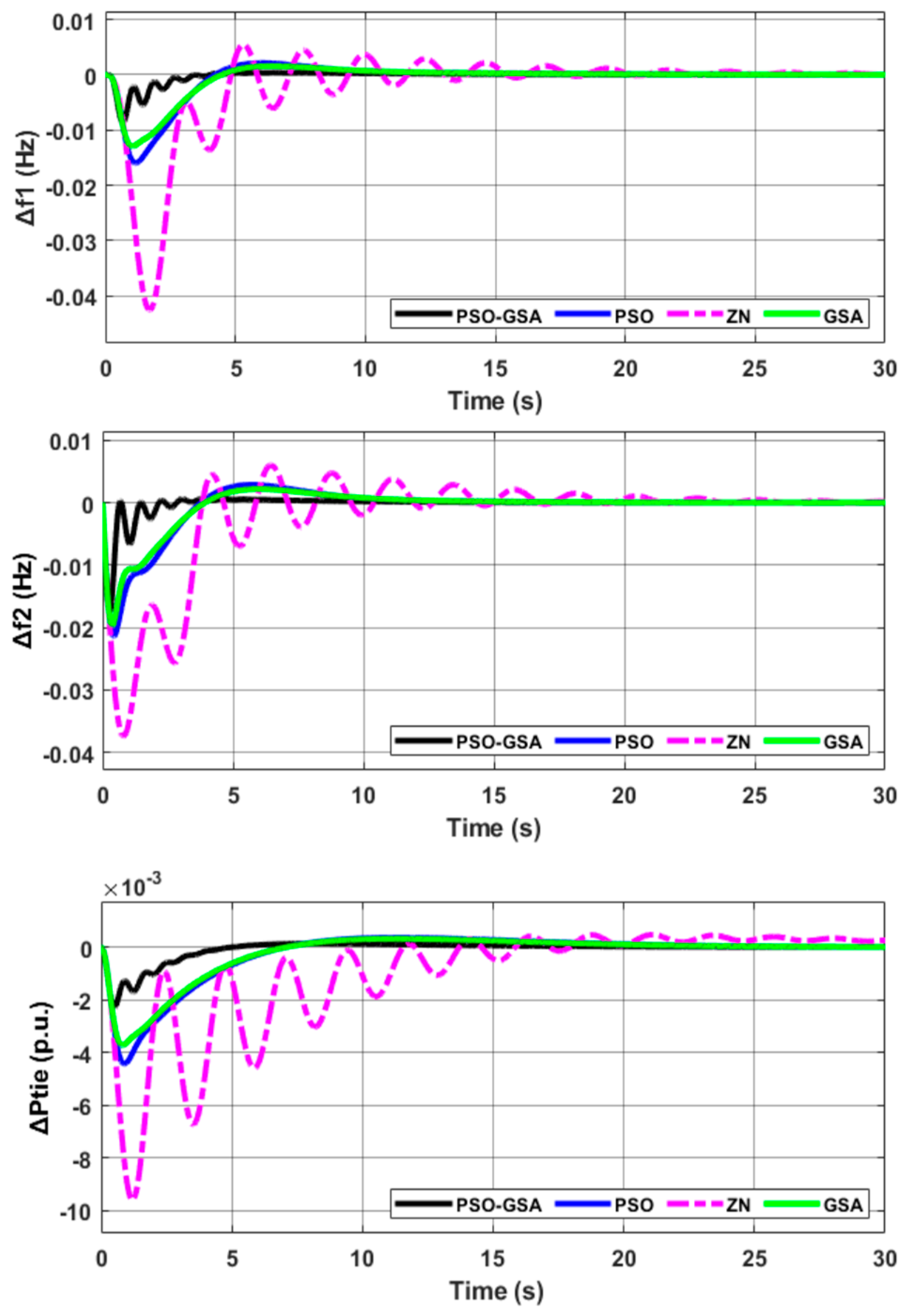
Case II-A: In this case, a 50% reduction in mismatch of inertia constant and damping the co-efficient of area-1 and area-2 is considered along with case I-A.
Figure 7 portrays the frequency deviation of area-1 and area-2 and the inter-area tie-line power fluctuations. The results illustrate that the oscillation in frequency and tie-line power decays to zero rapidly by the proffered PSO-GSA-tuned PID controller compared to the other controllers.
Table 2 and
Table 3 shows that the steady-state performance indices such as IAE and ITAE were remarkably reduced by the proposed controller.
Table 4 and
Table 5 depict the transient performance indices such as settling time, rise time, peak time, and peak magnitude of Δ
f1 and Δ
f2 respectively. It is seen from the results that the indices were considerably improved for the system without any overshoot.
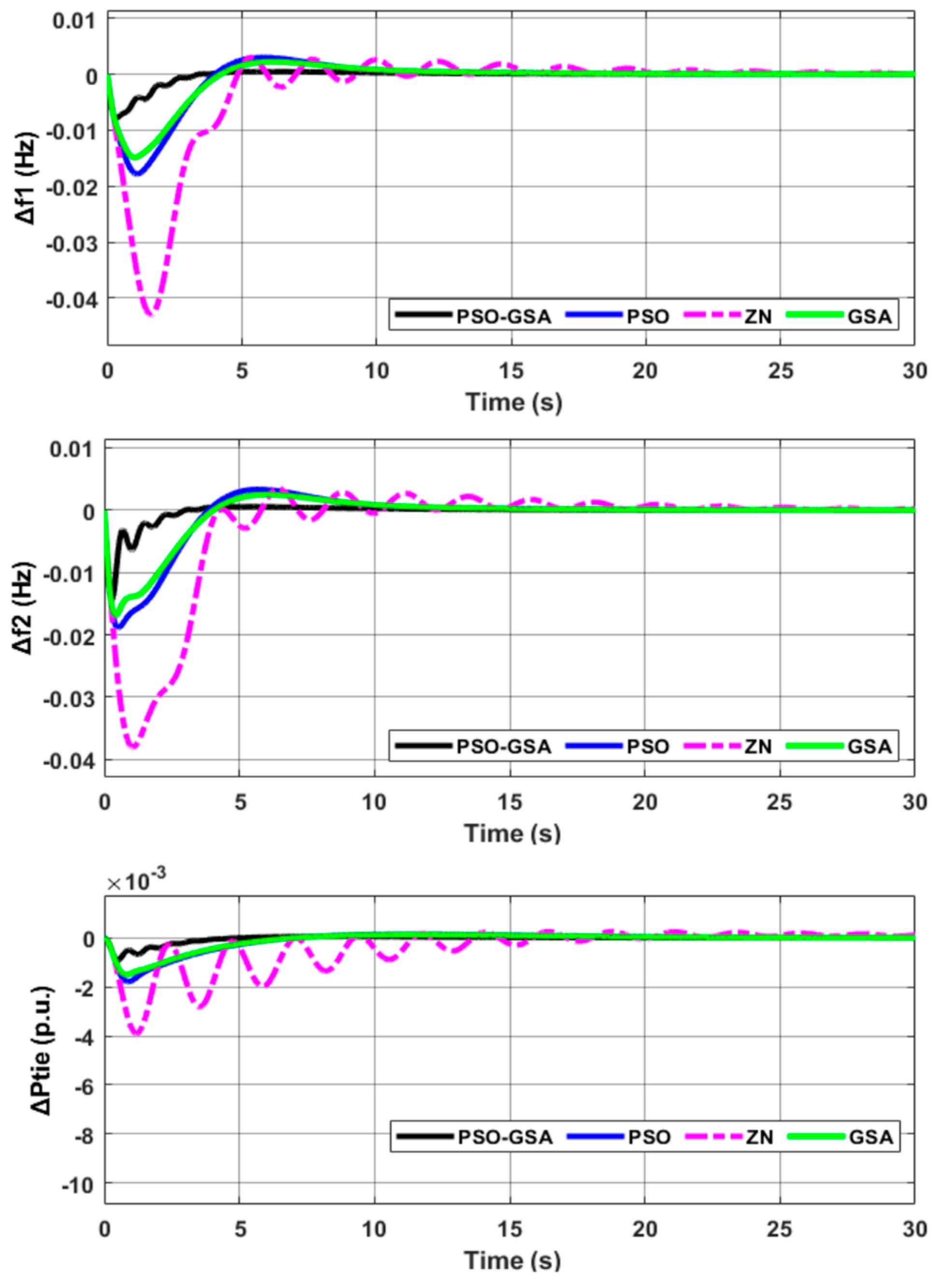
Case I-B: In this study, the load demand of ΔP
D1 equal to 10 MW and ΔP
D2 equal to 20 MW were considered on area-1 and area-2 respectively. The response of the frequency deviation for area-1 and area-2 and the inter-area tie-line power variation are illustrated in
Figure 8. It is inferred from the results the deviation in frequency and tie-line power were abruptly driven back to zero by the proposed controller. The transient and steady-state performance indices were superior for the PSO-GSA-tuned controller than the other controllers as portrayed in
Table 2,
Table 3,
Table 4 and
Table 5.
Case II-B: This case is similar to case I-B, but a decline of 50% of synchronizing power co-efficient mismatch is considered. The responses of the system, such as frequency deviations and inter-area tie-line power fluctuations are shown in
Figure 9. The transient and steady-state performance indices were significantly predominant for the proposed controller than other controllers as depicted in
Table 2,
Table 3,
Table 4 and
Table 5.
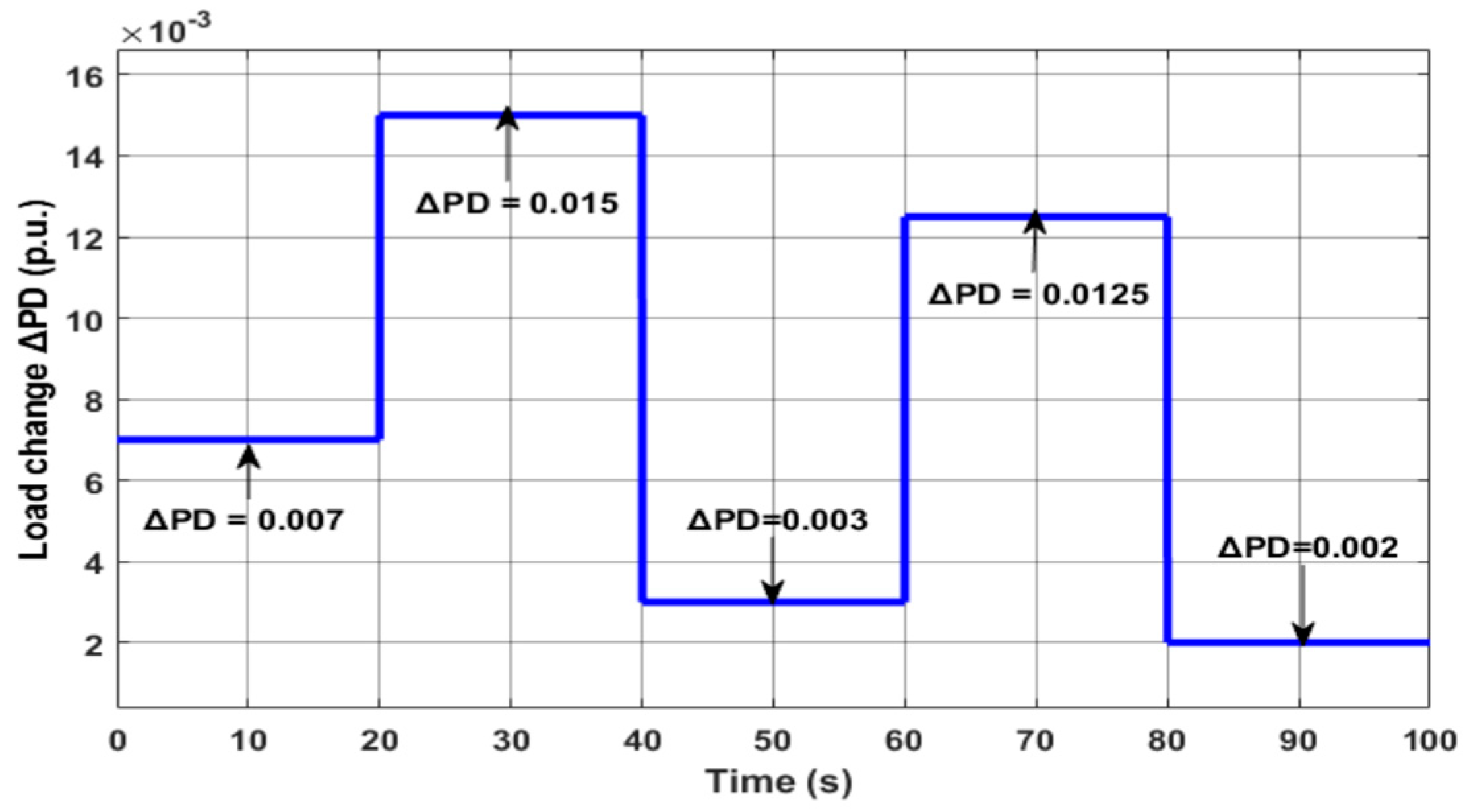
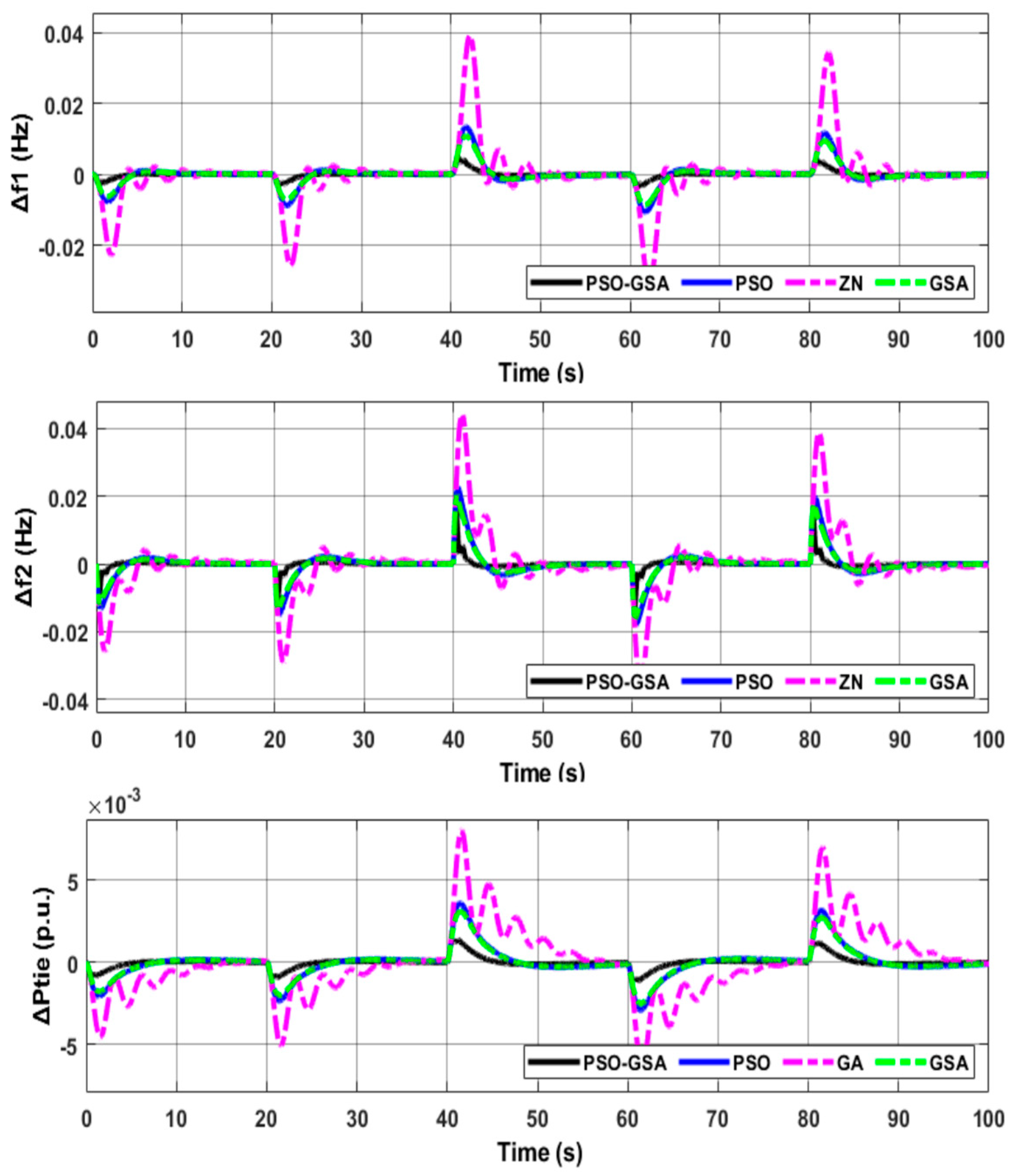
Case III: This section presents the adaptiveness of the propounded controller, consecutive load disturbances of 0.007, 0.015, 0.003, 0.0125, and 0.002 p.u. of plant capacity at time periods of 0, 20, 40, 60, and 80 s were applied to area-2, respectively, with area-1 remaining undisturbed, as shown in
Figure 10.
Figure 11 illustrates that the response of the system such as frequency deviation in area-1 and area-2 and tie-line power deviation settle faster for the uncertain load changes in the system for the proposed PSO-GSA-tuned controller compared to the Z-N, PSO, and GSA-tuned controllers. It is inferred from the results that the dynamics were settled faster by the proposed controller for a step-change in the load by the proper tuning of gain parameters such as
Kp,
Ki, and
Kd. It shows that the tuned values were quite robust and need not be retuned for significant change in system loading conditions using the proposed hybrid PSO-GSA controller.
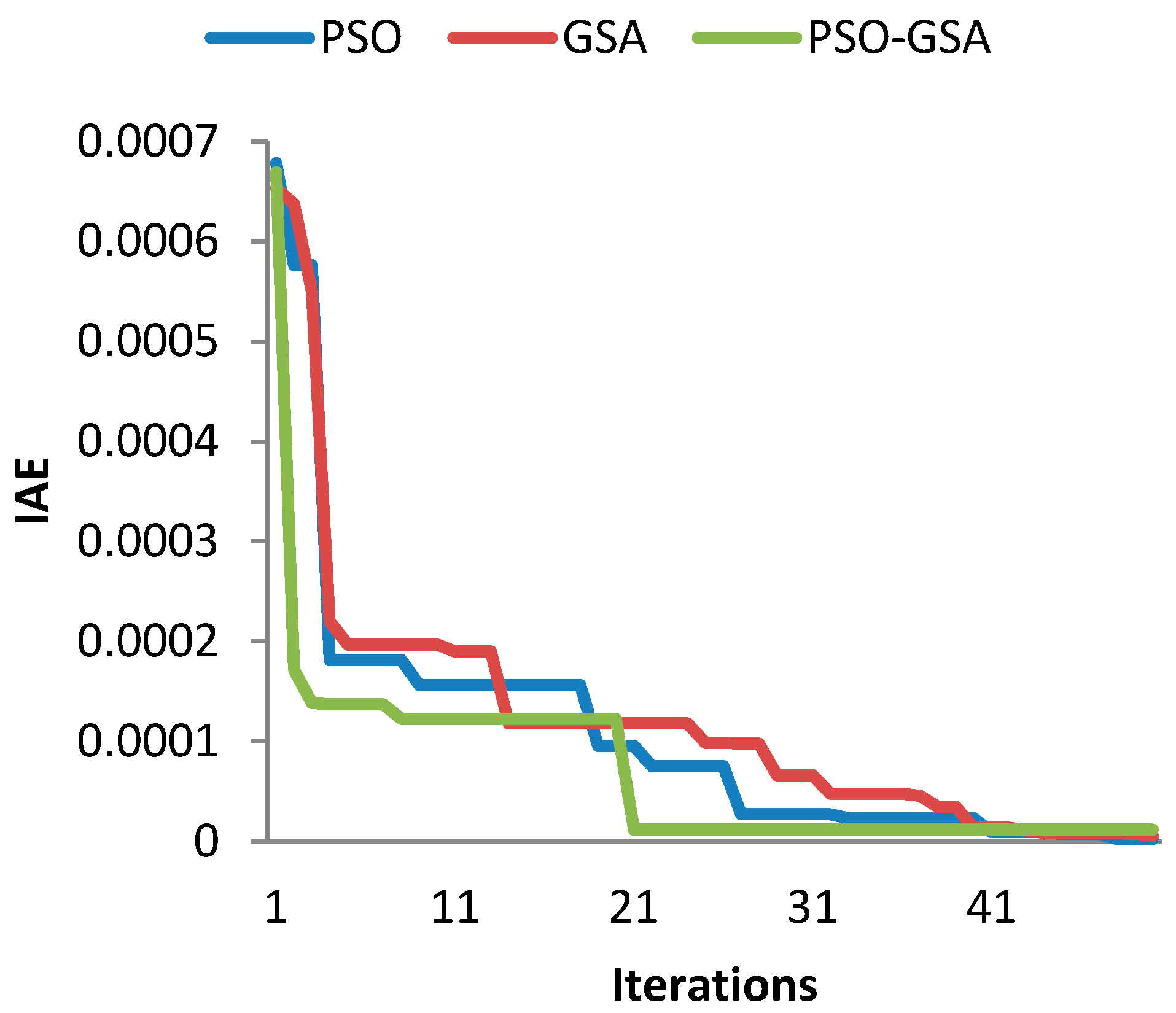
Computational Cost
The computational burden of various intelligence algorithms such as PSO, GSA, and PSO-GSA are discussed in this section. To tune the parameters of the PID controller of the two-area interconnected power system, the algorithms were coded using Matlab (.m file) and the simulation run was carried out in a personal computer (PC) with the following specifications:32-bit OS with x64-based processor (Intel(R) Core(TM) i5-2410M CPU @ 2.30 GHz) and a memory capacity of 8GB.
The initial design parameters assumed for the tuning of the controllers in various intelligence algorithms such as PSO, GSA, and PSO-GSA are discussed in
Section 3. The convergence curves for the PSO, GSA, and PSOGSA methods are illustrated in
Figure 12.
Table 6 indicates that the proposed PSOGSA method converges faster than the PSO and GSA method of tuning of controllers [
17,
18].
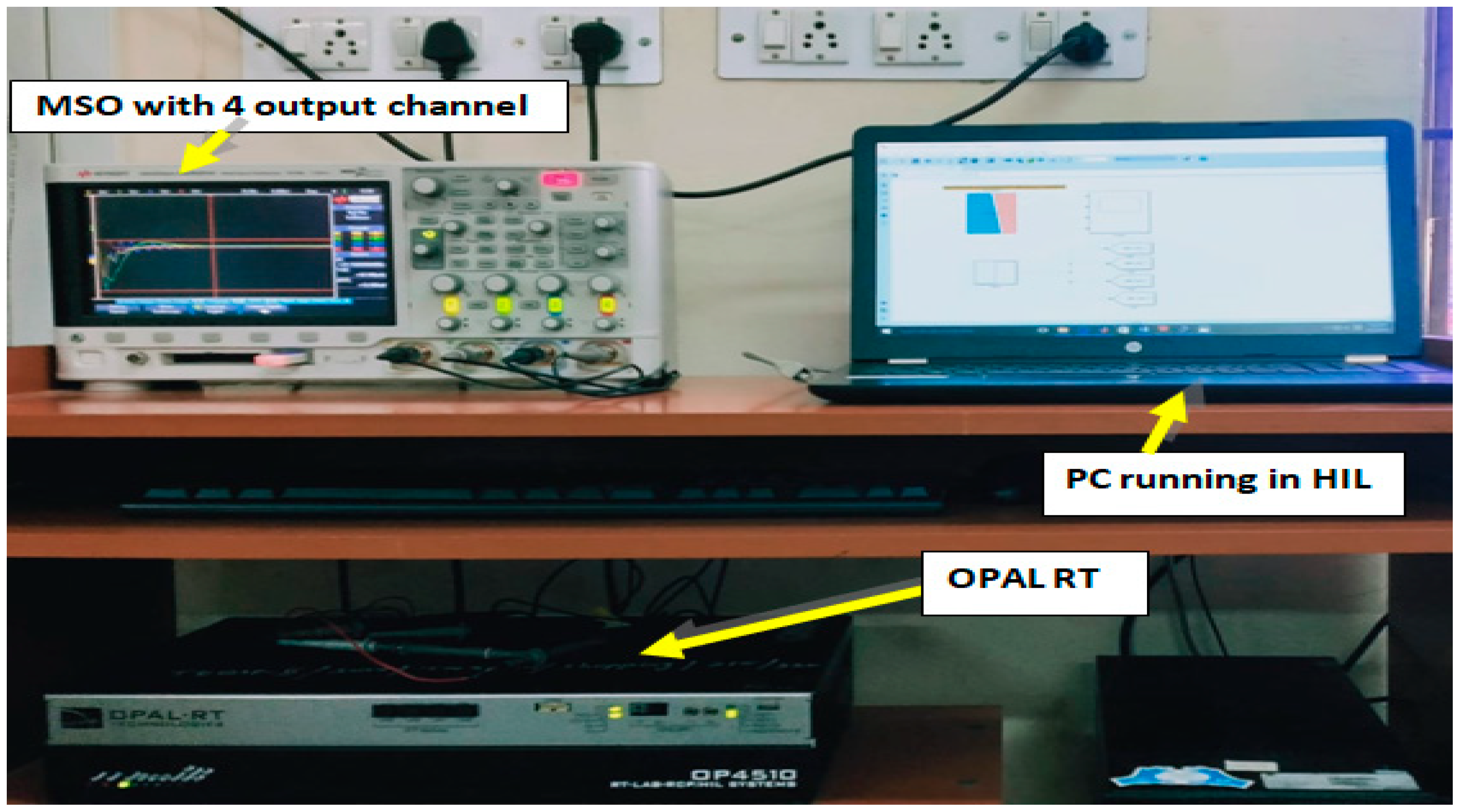
5. Hardware-in-the-Loop (HIL) Analysis–Real-Time Digital Simulator (RTDS)
The power system is a large interconnected system and it is more complex to develop the hardware setup of multi-area system. Therefore, in order to reduce the complexity of design projects, which has steadily increased, and to reduce the development costs, the proposed PSO-GSA-based PID controller was validated using a real-time digital simulator. RTDS provides power systems simulation technology for fast, reliable, accurate, and cost-effective study of power systems with complex high voltage alternating current (HVAC) and high voltage direct current (HVDC) networks. The RTDS is a fully digital electromagnetic transient power system simulator that operates in real-time. HYPERSIM is one of the most commercial RTDS available and has been developed by Hydro-Québec based on OPAL-RT Technologies Inc. The PC/FPGA-based real-time digital simulator was run in hardware-in-the-loop (HIL) to test the proposed controller equipment.
The OP4510 is a compact entry-level simulator that combines the core strengths of RT-LAB high-performance rapid control prototyping and HIL systems. It has 128 fast I/O channels with signal conditioning, additional RS422 channels, high-speed communication ports (SFPs), and is fully integrated with Matlab/Simulink, Sim Power system. The integration of high-end INTEL multi-core processors with powerful Kintex 7 FPGA provides greater simulation power and sub-microsecond simulation time steps to maximize the accuracy of fast-acting power grids/power electronic-based grid systems. It can simulate power grids up to a maximum of 200 nodes for various power system applications.
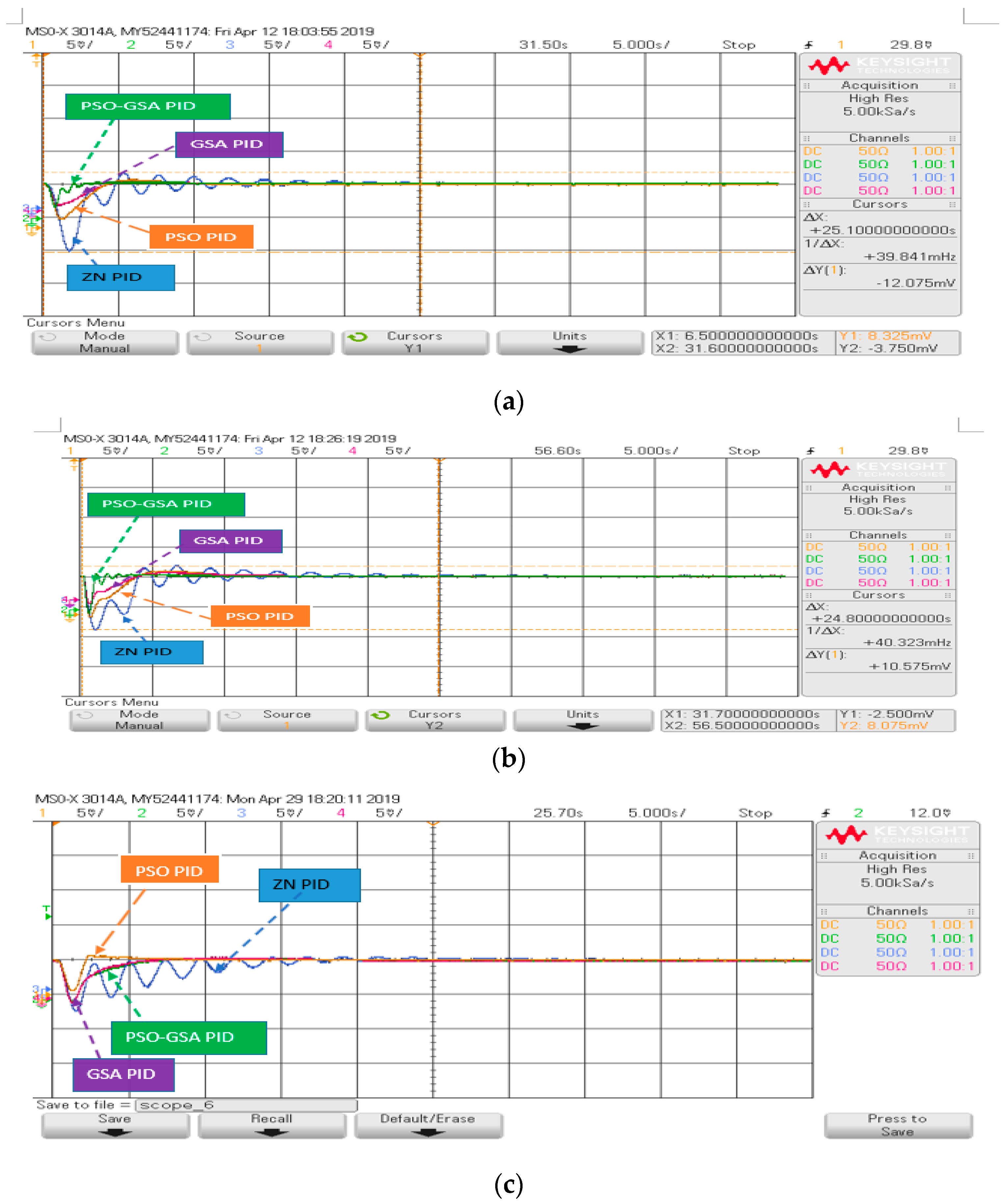
In this work, OP4510 is used to validate the proposed PSO-GSA-based control strategy for ALFC of the two-area dynamic power system. The experimental setup for testing the two-area system with the PSO-GSA-tuned PID controller and Z-N, PSO, and GSA-tuned PID controllers is shown in
Figure 13. The obtained results such as frequency deviation and tie-line power deviation in RTDS using HIL simulation for case I-A is shown in
Figure 14a–c respectively.
6. Comparative Analysis
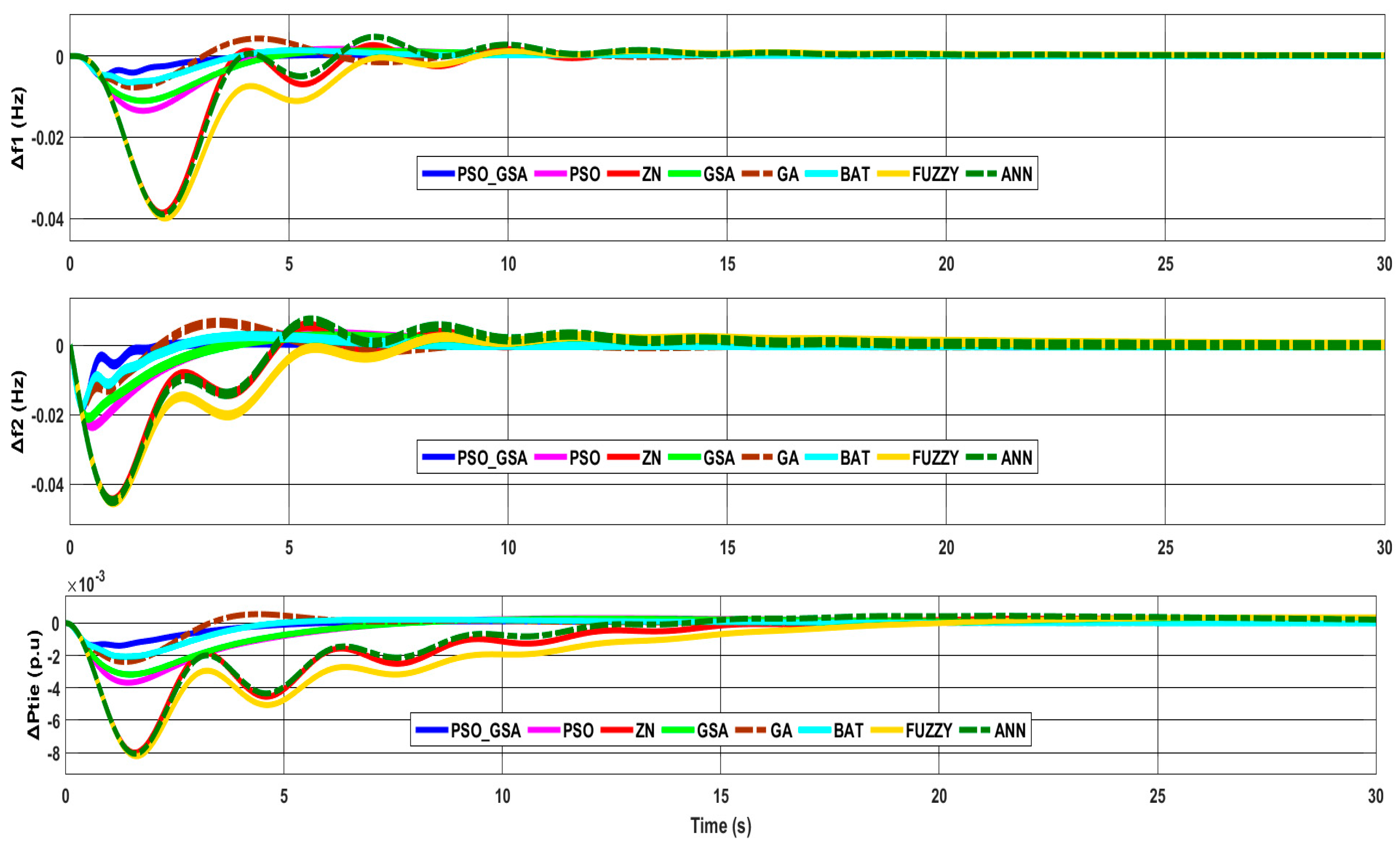
In this section, the quantitative analysis of system performance for the proposed PSO-GSA method of tuning of the PID controller is compared with different meta-heuristic methods like GA, PSO, GSA, and BAT, and also non-meta-heuristic methods such as Z-N, ANN, and Fuzzy were discussed. In this case, the effectiveness of the controller for TAIPS is tested for changes in load demand in area-2 of 25 MW with load demand in area-1 remaining unperturbed. In addition, the system uncertainties such as 50% reduction in inertia constant and 50% decline in synchronizing power coefficient are considered. The dynamic responses such as frequency and tie-line power variation of TAIPS for such changes are recorded and presented in
Figure 15. It is inferred from the results that the proffered PSO-GSA method drove back the system oscillations quickly to a steady state with minimum control effort compared other methods. This indicates that the robust operation of the controller is achieved through optimal tuning of gain parameters by the proposed method.
Table 7 depicts, the% improvement of the performance of all the methods subjected to the conventional Z-N-tuned PID controller. It is observed from the results that parameters such as IAE, settling time, and control effort are much improved for the meta-heuristic methods compared to the Fuzzy and ANN techniques. Among the various meta-heuristic approaches, the performance of IAE, settling time, and control effort are also enhanced predominantly to 87.65%, 15.39%, and 91.17% in area-1 and 86.46%, 41.35% and 91.04% in area-2, respectively, by the presented PSO-GSA optimization technique. Overall, the work done by the controller, measured by means of control effort, reduces drastically using the proffered method of optimization, which leads to the reliable operation of system for any uncertain disturbances.
7. Conclusions
In this paper, a new hybrid PSO-GSA-based optimization technique for tuning the parameters of a PID controller for TAIPS considering the system non-linearities, such as GDB and GRC, is presented. The effectiveness of the proposed controller is validated with various cases such as variation in load demand, the inertia of the system, and synchronizing power coefficient (Case I-A, II-A, I-B, and II-B). The results showed that the steady-state performance indices such as IAE and ITAE, and the transient performance indices like settling time, rise time, peak time, and peak magnitude are significantly improved for the proposed PSO-GSA-tuned PID controller than for the conventional Z-N, PSO, and GSA-tuned PID controller. In addition, the robustness of the controller is tested with step change in the load demand and the results obtained reveal that the proposed controller settles faster even for large disturbance compared to Z-N, PSO, and GSA tuned controllers. Moreover, the computational burden of the proffered PSO-GSA method is less, as it converges faster than the PSO and GSA algorithms. The real-time implementation of ALFC with the proposed controller is validated using the HIL-real time digital simulation (RTDS) and the results obtained are more promising as that of simulation results. Also, a quantitative comparison was made with meta-heuristic and non-meta-heuristic techniques. The results reveal that the hybrid optimization techniques improve the control effort by 91% compared to any other methods, demonstrating that the PSO-GSA-tuned controller can operate for wider range of system operation with uncertainties.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}