Practical Road-Resistance Functions for Expressway Work Zones in Occupied Lane Conditions


Abstract
:1. Introduction
2. Road-Resistance Model
3. Expected Speed Calibration in the Construction Area
3.1. Data Processing
3.2. Desired Speed Calibration
4. Practical Road-Resistance Function in the Construction Area
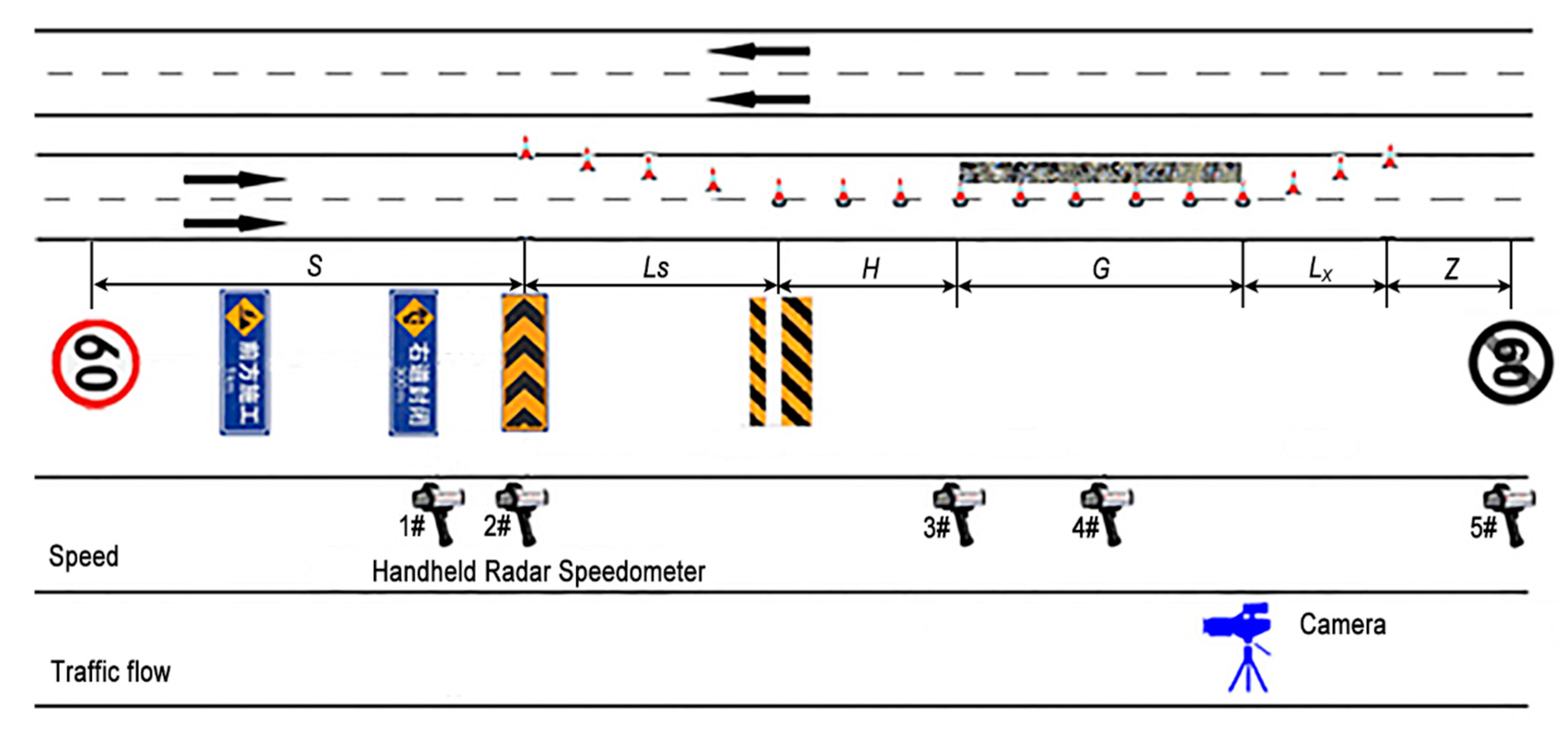
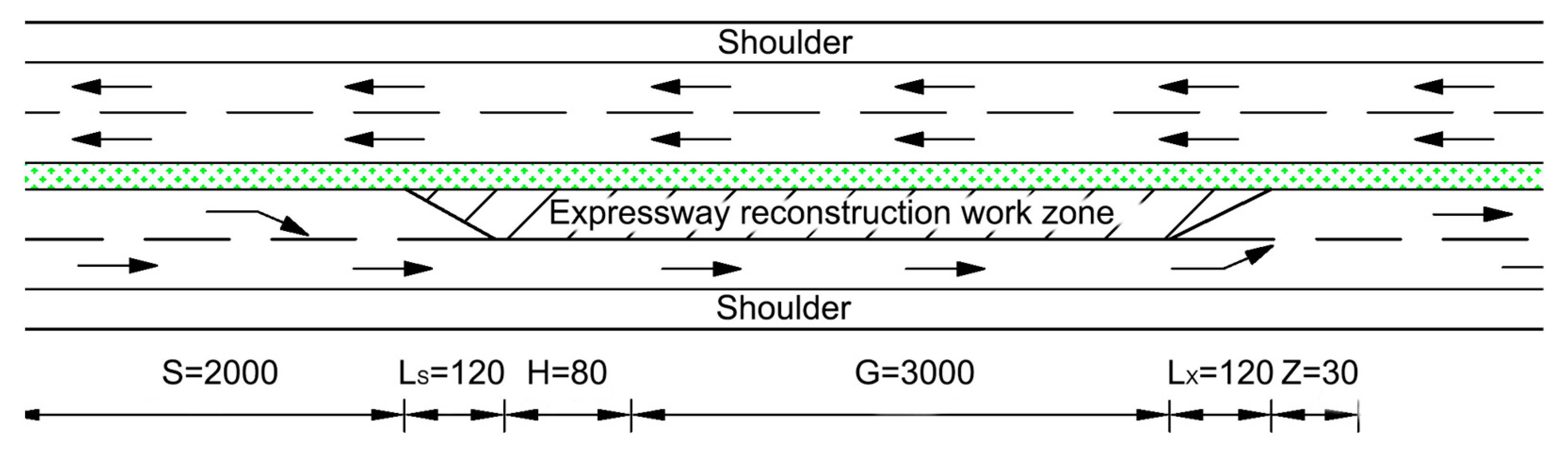
4.1. Simulation Model Construction
4.2. Determination of Sample Size
4.3. Significance of Influencing Factors
4.4. Reasonable Interval of the Rate of Heavy Vehicles
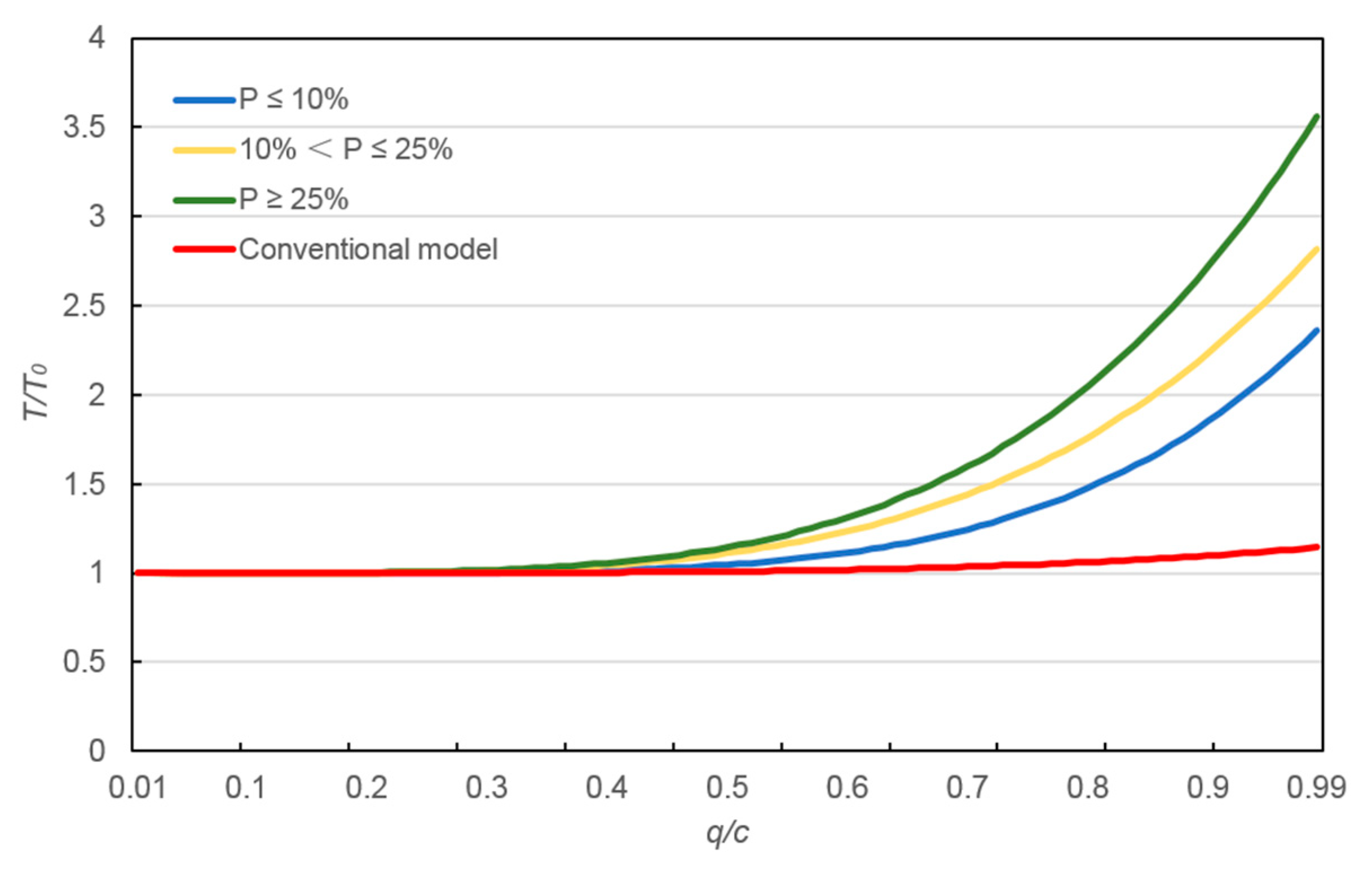
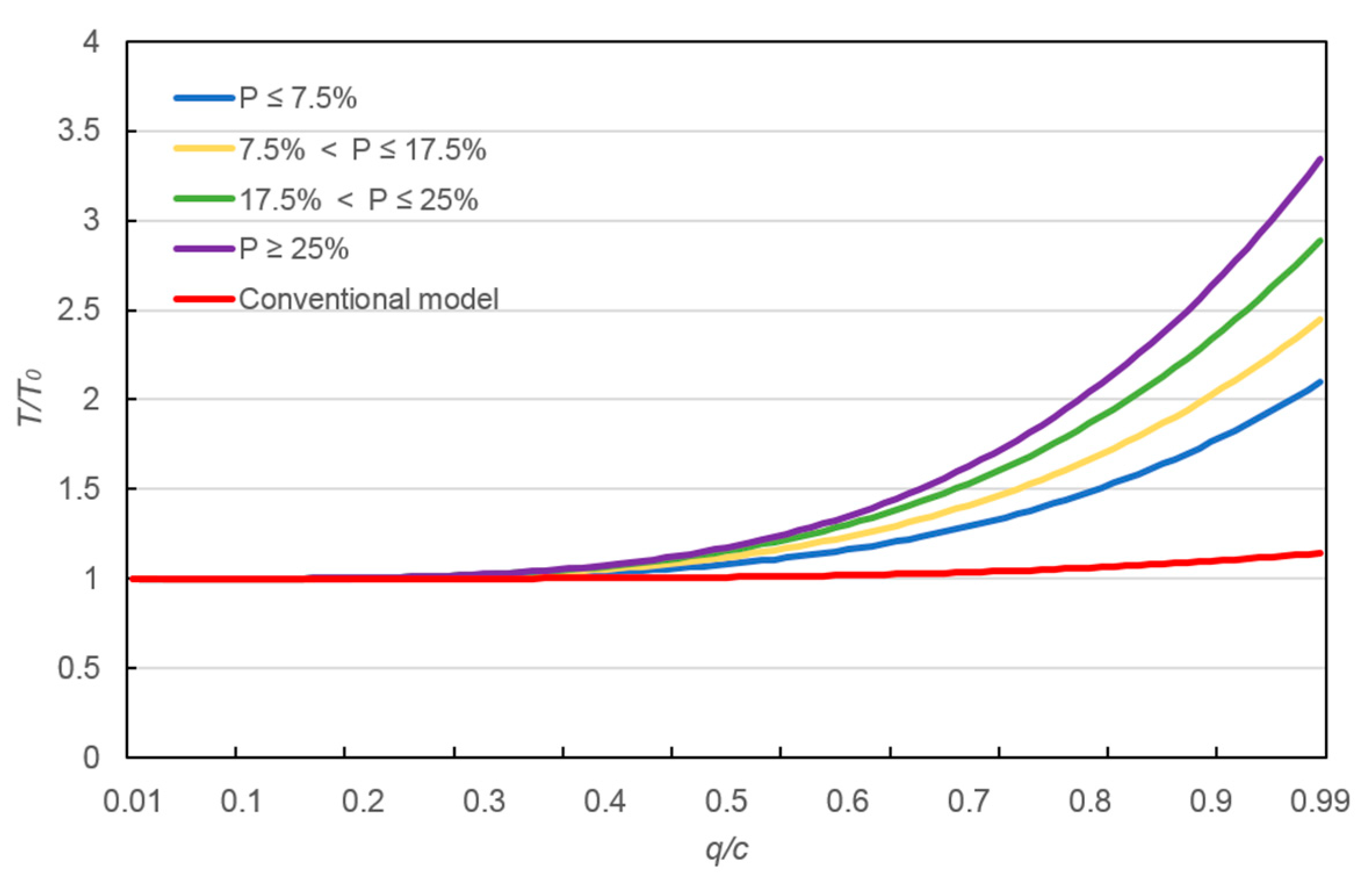
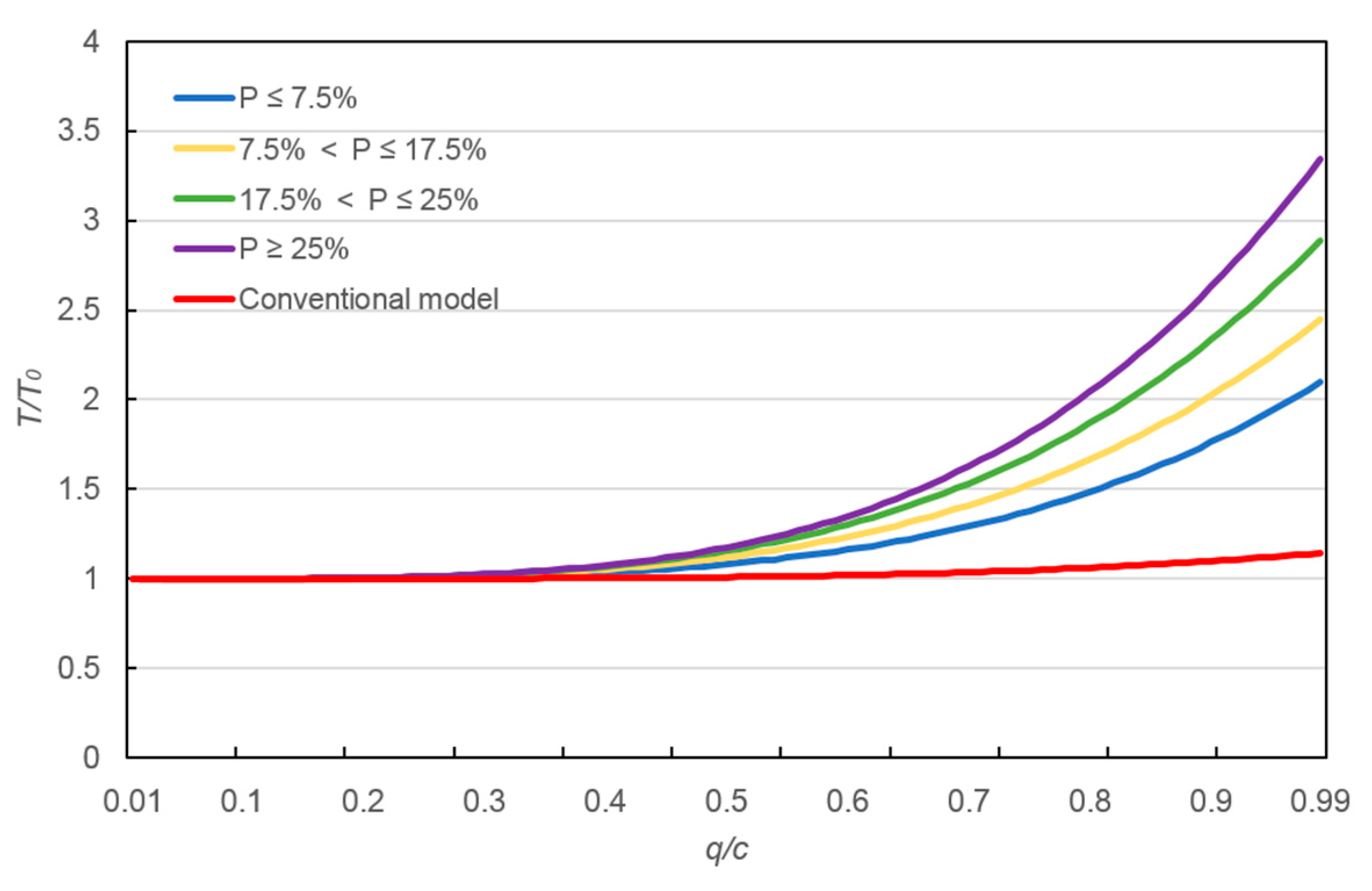
4.5. Road-Resistance Functions for Expressway Work Zones
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Spiess, H. Conical Volume-Delay Functions. Technical Note. Transp. Sci. 1990, 24, 153–158. [Google Scholar] [CrossRef]
- Akcelik, R. A new look at Davidson’s travel time function. Traffic Eng. Control 1978, 19, 459–463. [Google Scholar]
- Davidson, K.B. The Theoretical Basis of a Flow-Travel Time Relationship for Use in Transportation Planning. Aust. Road Res. 1978, 8, 183–194. [Google Scholar]
- Wang, W.; Zhang, G. Study on the Road-resistance function of Urban Roads. J. Chongqing Jiaotong Univ. (Nat. Sci). 1992, 11, 84–92. [Google Scholar]
- Yan, W.; Zhang, J.; Zhang, X. Maximum Likelihood Calibration of Road-resistance function. J. Highw. Transp. Res. Dev. 1996, 13, 24–28. [Google Scholar]
- Wang, Y.; Zhou, W.; Lu, L. Research on the Theory and Application of Road Impedance Function. J. Highw. Transp. Res. Dev. 2004, 21, 82–85. [Google Scholar]
- Wang, J. Research of Synthesis Impedance Function; Southwest Jiaotong University: Chengdu, China, 2006. [Google Scholar]
- Quan, L. Study on the Road-Resistance Function of Possible Road Segments in Urban Areas; Southeast University: Nanjing, China, 2008. [Google Scholar]
- Huo, F. Theory and Application of Regional Highway Network Resistance Function; Chang’an University: Xi’an, China, 2012. [Google Scholar]
- He, N.; Zhao, S. Study on Urban Road Impedance Function Model: Taking Dalian as an Example. J. Highw. Transp. Res. Dev. 2014, 31, 104–108. [Google Scholar]
- Song, B.W.; Zhang, J.Y.; Li, Q.Y.; Liu, Q. Improved Dynamic Road-resistance function Based on Traffic Wave Theory. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2014, 33, 106–110. [Google Scholar]
- Liu, N. Research and Application of Urban Road Impedance Model; Dalian University of Technology: Dalian, China, 2012. [Google Scholar]
- Zhou, J.B.; Chen, H.; Li, X.Y.; Wang, L. Study on road-resistance function model and applicability. Highway 2013, 180–184. [Google Scholar] [CrossRef]
- Zhang, Q. Research on Parameter Calibration of BPR Function in Public Road Section under Mixed Traffic Flow; Central South University: Changsha, China, 2013. [Google Scholar]
- Yu, H. Research on Road-Resistance Function of Mountainous Cities Based on Big Data; Chongqing Jiaotong University: Chongqing, China, 2016. [Google Scholar]
- Wang, S.; Huang, W.; Lu, Z. Derivation of Road-resistance function and Its Fitting Analysis. J. Highw. Transp. Res. Dev. 2006, 23, 107–110. [Google Scholar]
- Zhao, Y.; Lu, J.; Zhang, W.J.; Sun, X.L. Analysis of the Improvement Effect of Road Congestion Charging Policy under Logit Model. J. Harbin Inst. Technol. 2017, 49, 80–85. [Google Scholar]
- Reilly, W. Highway Capacity Manual 2000. Tr News 1997, 1, 5–7. [Google Scholar]
- Li, L.; Zhang, D. Merging Vehicles and Lane Speed-Flow Relationship in a Work Zone. Sustainability 2018, 10, 2210. [Google Scholar] [CrossRef]
- Gao, T.; Chen, K. Microscopic Simulation Parameters Calibration of CMEM Model in Temporary Conservation Area. J. Transp. Eng. 2016, 16, 114–124. [Google Scholar]
- Ren, G.; Liu, X.; Quan, L. Practical road-resistance function of urban roads under mixed traffic conditions. China J. Highw. Transp. 2009, 22, 92–95. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VISSIM Parameters | Default Value | Calibration Value |
|---|---|---|
| Average parking distance | 2.1 | 2.0 |
| Additional distance to safety distance | 2.5 | 2.4 |
| Multiplier part of safety distance | 3.2 | 3.1 |
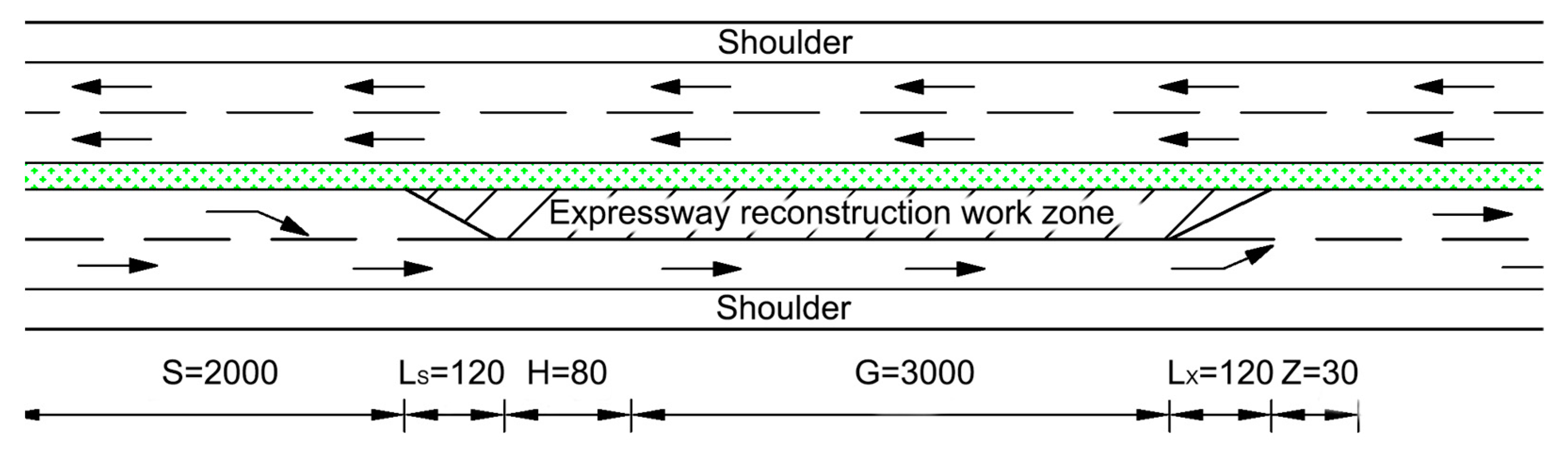
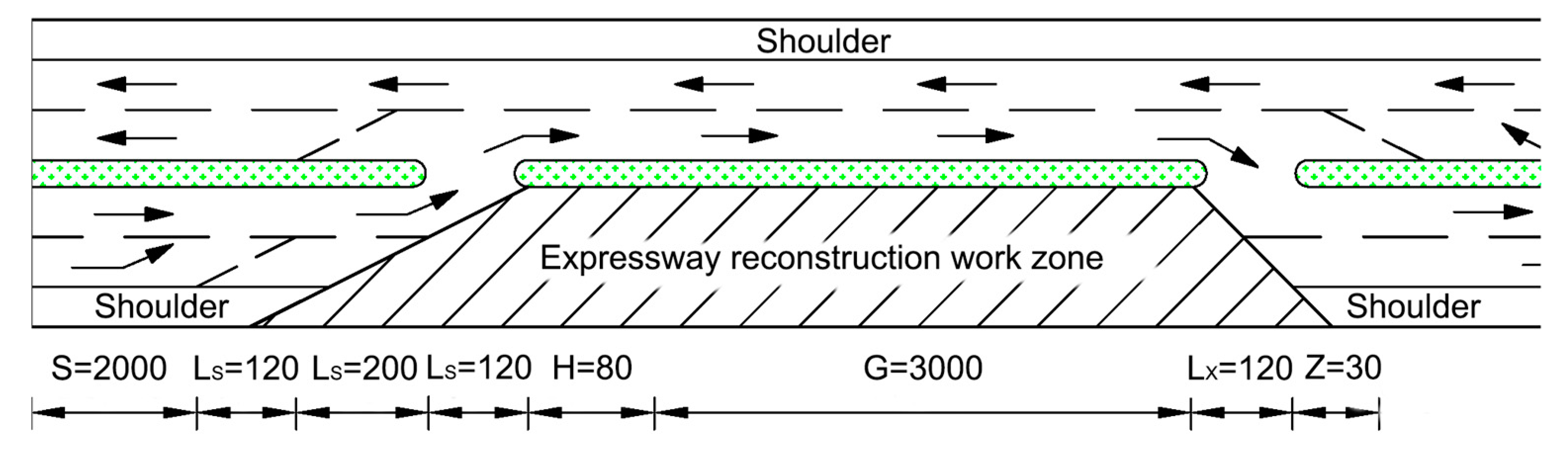
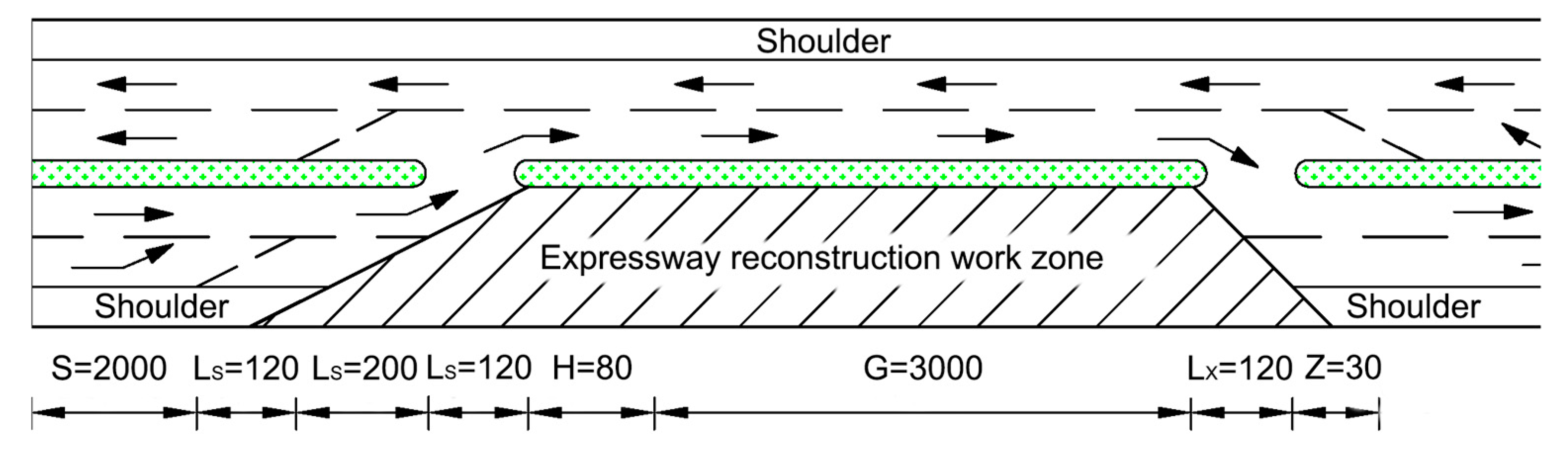
| Condition | S | LS | H | G | LX | Z |
|---|---|---|---|---|---|---|
| Closed inside lane | 2000 | 120 | 80 | 3000 | 120 | 30 |
| Closed half lane | 2000 | 120 (200) | 80 | 3000 | 120 | 30 |
| The Way of Closed Lane | The Rate of the Heavy Vehicle | Sample Sizes |
|---|---|---|
| Closed inside lane | P ≤ 10% | 100 |
| 10% <P ≤ 25% | 150 | |
| P > 25% | 75 | |
| Closed half lane | P ≤ 7.5% | 75 |
| 7.5% < P ≤ 17.5% | 100 | |
| 17.5% < P ≤ 25% | 75 | |
| P > 25% | 75 |
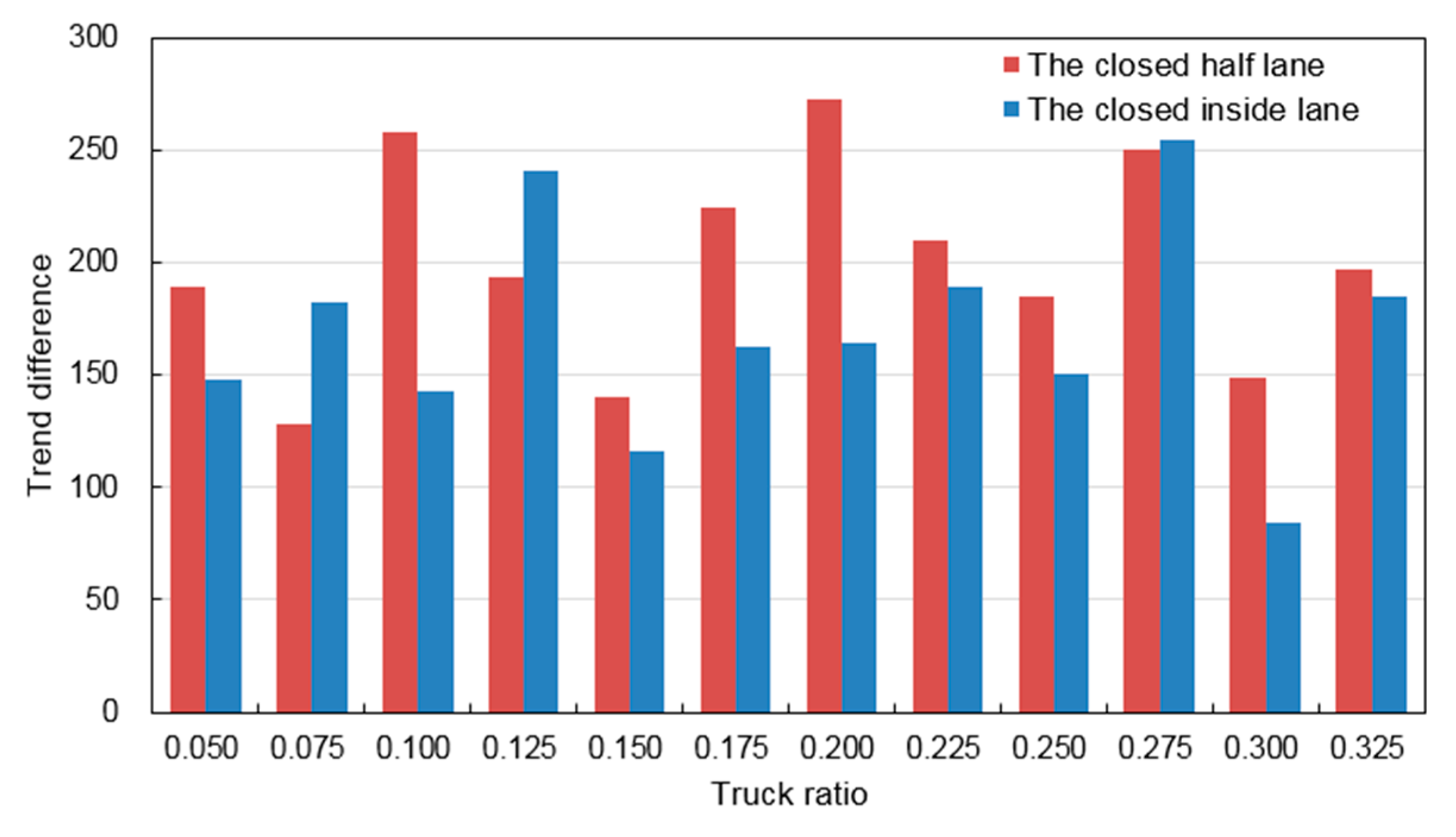
| Rate of Heavy Vehicles | 2.5% | 5% | 7.5% | 10% | 12.5% | 15% | 17.5% | 20% | 22.5% | 25% | 27.5% | 30% | 32.5% |
| Closed Half Lane | 1800 | 1750 | 1750 | 1750 | 1700 | 1650 | 1650 | 1600 | 1600 | 1600 | 1550 | 1550 | 1500 |
| Closed Inside Lane | 1800 | 1750 | 1750 | 1700 | 1700 | 1650 | 1650 | 1650 | 1600 | 1600 | 1600 | 1550 | 1550 |
| Difference Source | Sum of Squares of Deviations | Freedom | Mean Square Deviation | F | Critical Value |
|---|---|---|---|---|---|
| A | 269,895.5659 | 12 | 22,491.29716 | 33.474 | 1.75 |
| B | 1,960,692.807 | 24 | 81,695.53363 | 121.590 | 1.52 |
| Errors | 193,506.129 | 288 | 671.8962814 | ||
| Total | 2,424,094.502 | 324 |
| The Way of Closed Lane | The Rate of the Heavy Vehicle | Road-Resistance Function | Number of Iterations | F | F0.05(n) | R2 | Goodness of Fit | ||
|---|---|---|---|---|---|---|---|---|---|
| Closed inside lane | P ≤ 10% | 29 | 396.622 | 1.35 | 0.487 | 129.070 | 0.802 | good | |
| 10% < P ≤ 25% | 24 | 880.894 | 1.22 | 0.975 | 185.312 | 0.857 | good | ||
| P > 25% | 16 | 697.786 | 1.53 | 0.505 | 100.345 | 0.909 | good | ||
| Closed half lane | P ≤ 7.5% | 19 | 296.343 | 1.53 | 0.283 | 100.345 | 0.802 | good | |
| 7.5% < P ≤ 17.5% | 18 | 427.711 | 1.35 | 0.600 | 129.070 | 0.814 | good | ||
| 17.5% < P ≤ 25% | 28 | 518.313 | 1.53 | 0.503 | 100.345 | 0.877 | good | ||
| P > 25% | 24 | 780.189 | 1.53 | 0.536 | 100.345 | 0.914 | good |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Qin, J.; Zhang, M.; Zhang, H.; Hou, Y. Practical Road-Resistance Functions for Expressway Work Zones in Occupied Lane Conditions. Sustainability 2019, 11, 382. https://doi.org/10.3390/su11020382
Zhang C, Qin J, Zhang M, Zhang H, Hou Y. Practical Road-Resistance Functions for Expressway Work Zones in Occupied Lane Conditions. Sustainability. 2019; 11(2):382. https://doi.org/10.3390/su11020382
Chicago/Turabian StyleZhang, Chi, Jihan Qin, Min Zhang, Hong Zhang, and Yudi Hou. 2019. "Practical Road-Resistance Functions for Expressway Work Zones in Occupied Lane Conditions" Sustainability 11, no. 2: 382. https://doi.org/10.3390/su11020382
APA StyleZhang, C., Qin, J., Zhang, M., Zhang, H., & Hou, Y. (2019). Practical Road-Resistance Functions for Expressway Work Zones in Occupied Lane Conditions. Sustainability, 11(2), 382. https://doi.org/10.3390/su11020382