Experimental Study on the Performance of an Innovative Tide-Induced Device for Artificial Downwelling




Abstract
1. Introduction
2. Design of the Tide-Induced Device and Proof of the Concept
2.1. Design of the Tide-Induced Device for Artificial Downwelling
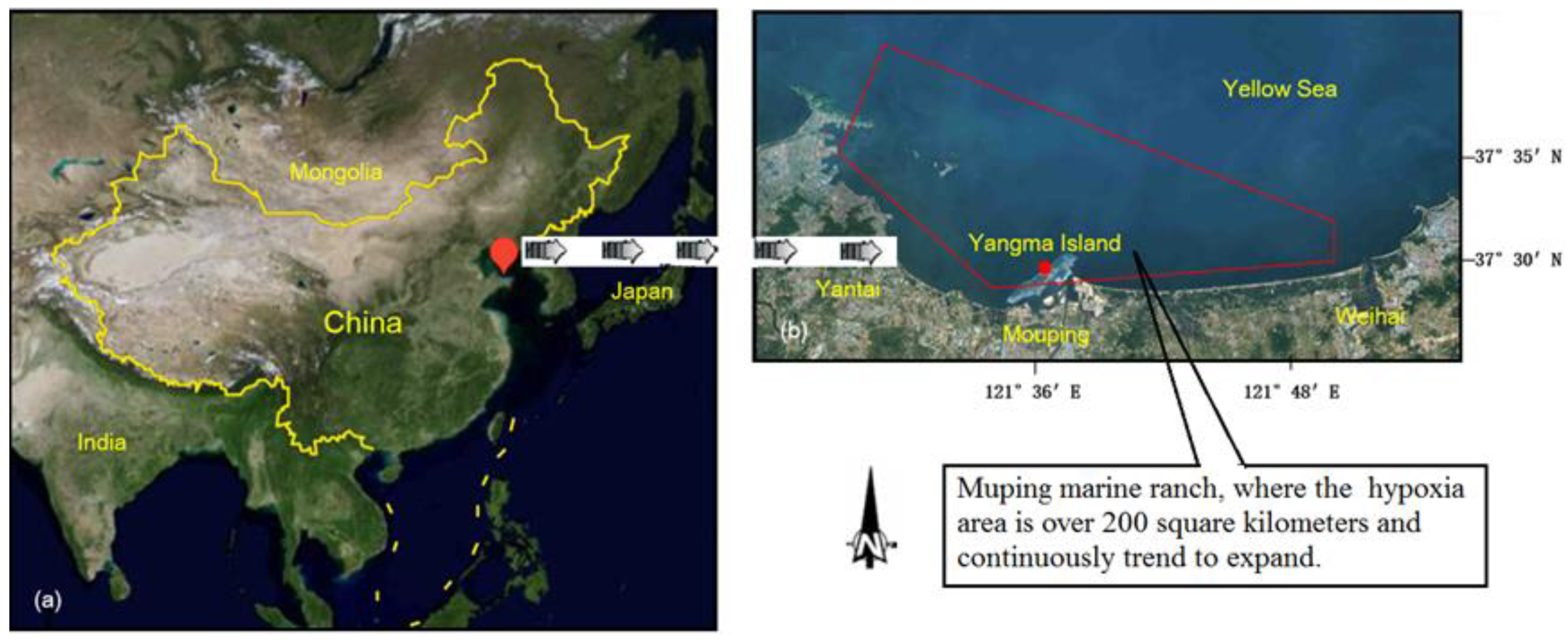
2.2. Study Site
2.3. Theoretical Analysis
3. Experimental Setup and Methods
3.1. Facility and Setup
3.2. Flow Measurements
3.3. Similitude Design
3.4. Experimental Procedure
- The salted water is configured by mixing industrial salt and freshwater, and then the water temperature and salinity are measured with a thermo-salinity meter. The measured value can be used to determine the density of seawater from the equation of state for seawater.
- Turn on the water tap and pour fresh water into the flume to maintain the water level at a depth of 180 cm.
- Start up the pumping system and open the camera to record the process of the downwelling flow inside and outside the tube. During this phase, the horizontal flow velocities are set from 0.05 to 0.15 m/s. Ink can not be injected in front of the inlet of the device until the flow is stable, and the ink head should be on the same horizontal line as the inlet.
- Repeat steps 1–3 for the three different density difference heads of 0.02001 cm, 0.04004 cm and 0.06005 cm in the experiment.
4. Results and Discussion
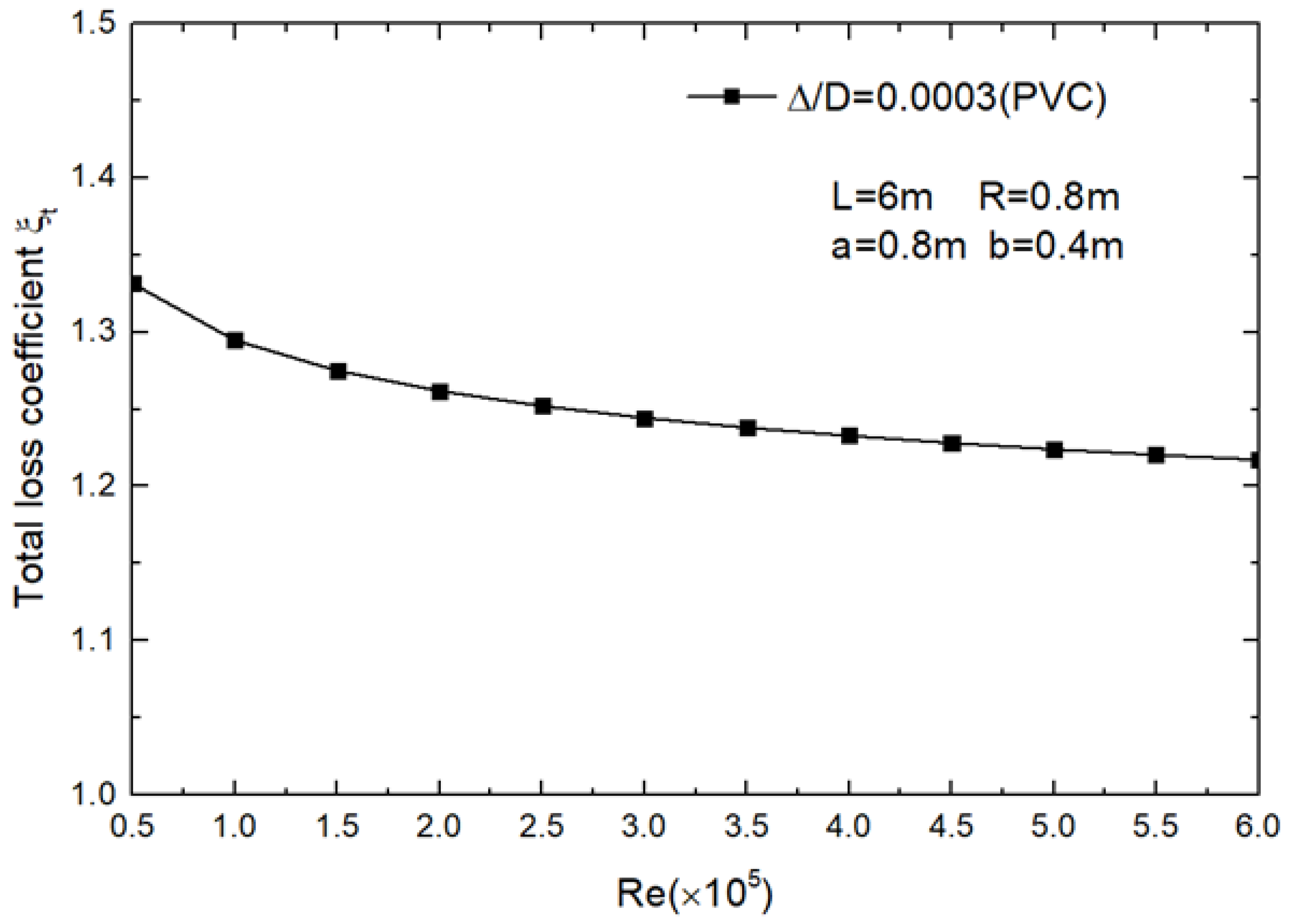
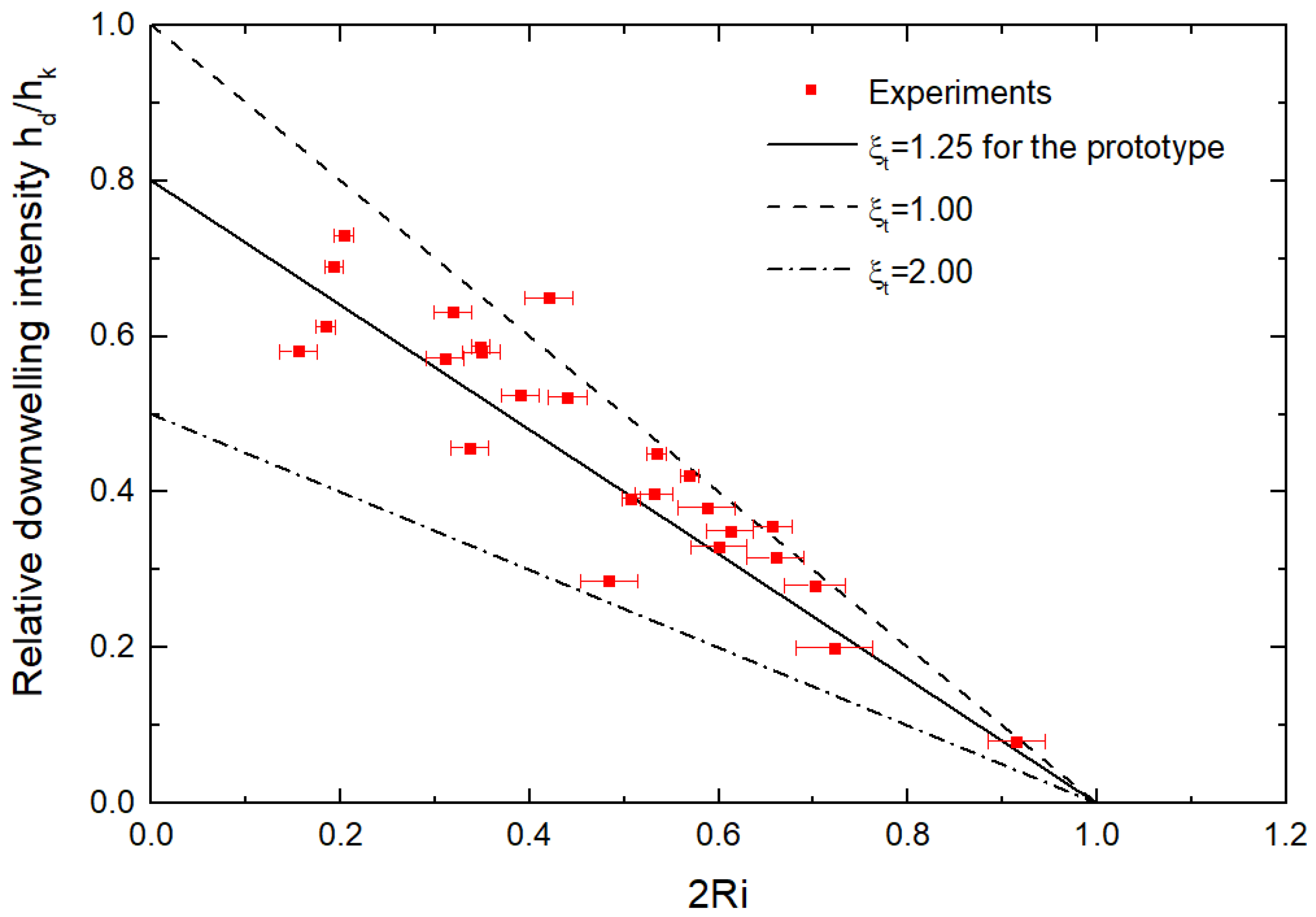
4.1. Validation of the Theoretical Model
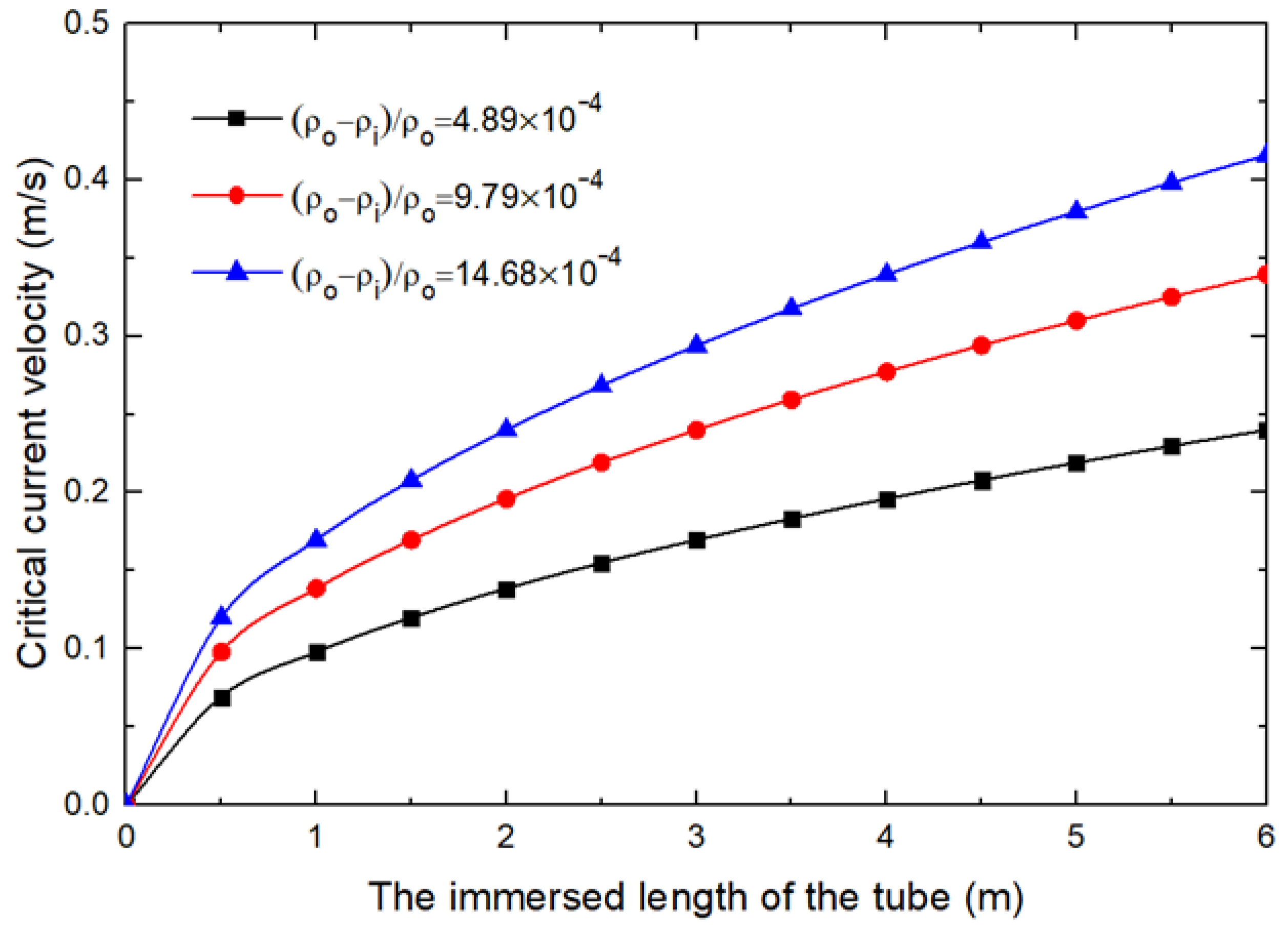
4.2. Effects of Immersed Length below the Pycnocline on Critical Current Velocity
4.3. Effects of Horizontal Current Velocity on Downwelling Flow Rate
4.4. Effects of Relative Density Difference on Downwelling Flow Rate
4.5. Effects of Tube Geometrical Dimensions on Downwelling Flow Rate and Efficiency
4.6. Evaluation of Engineering Effect in Muping Marine Ranch
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| length of the rectangular section (m) | |
| width of the rectangular section (m) | |
| actual area of the section (m2) | |
| cross-sectional area of the overflow (m2) | |
| equivalent diameter of the tube (m) | |
| thickness of the tube (m) | |
| gravity acceleration, 9.81 m/s2 | |
| thickness of the dense bottom water (m) | |
| mean water level (m) | |
| immersed length of the tube below the pycnocline (m) | |
| depth below the pycnocline (m) | |
| L | downwelling tube length (m) |
| downwelling flow rate in the tube (m3/s) | |
| radius of the center line of the bend (m) | |
| hydraulic radius (m) | |
| Reynolds number | |
| Richardson number | |
| typical velocity of horizontal current (m/s) | |
| average horizontal flow velocity (m/s) | |
| critical flow velocity of induced downwelling flow (m/s) | |
| average downwelling flow velocity in the tube (m/s) | |
| horizontal current velocity through the upper bend inlet (m/s) | |
| kinetic head of downwelling flow (m) | |
| density difference head (m) | |
| total head loss of fluid motion (m) | |
| kinetic head of horizontal current (m) | |
| variable of water depth (m) | |
| water depth at the tube inlet (m) | |
| water depth at the tube outlet (m) | |
| t | water temperature (°C) |
| Greek symbols | |
| inner wall roughness of the tube (m) | |
| relative density difference | |
| Darcy–Weisbach friction factor | |
| dynamic viscosity of water, 0.001 PaS | |
| water density at the depth of z (kg/m3) | |
| water density at the depth of (kg/m3) | |
| water density at the depth of (kg/m3) | |
| total loss coefficient | |
| bend loss coefficient | |
| entrance frictional loss coefficient | |
| exit frictional loss coefficient | |
| modified coefficient | |
| Subscripts | |
| refers to the physical model | |
| refers to the prototype | |
| refers to the ratio of the physical model to the prototype | |
References
- Conley, D.J. Ecology: Save the Baltic Sea. Nature 2012, 486, 463–464. [Google Scholar] [CrossRef] [PubMed]
- Diaz, R.J.; Rosenberg, R. Marine benthic hypoxia: A review of its ecological effects and the behavioural responses of benthic macrofauna. Oceanogr. Mar. Biol. 1995, 33, 245–303. [Google Scholar]
- Chen, C.C.; Gong, G.C.; Shiah, F.K. Hypoxia in the East China Sea: One of the largest coastal low-oxygen areas in the world. Mar. Environ. Res. 2007, 64, 399–408. [Google Scholar] [CrossRef] [PubMed]
- Rabalais, N.N.; Turner, R.E.; Díaz, R.J.; Justić, D. Global change and eutrophication of coastal waters. ICES J. Mar. Sci. 2009, 66, 1528–1537. [Google Scholar] [CrossRef]
- Diaz, R.J.; Rosenberg, R. Spreading dead zones and consequences for marine ecosystems. Science 2008, 321, 926–929. [Google Scholar] [CrossRef] [PubMed]
- Ouchi, K.; Nakahara, H. The deep ocean water upwelling machine using density current-creation of fishing ground and absorption of co/sub 2. In Proceedings of the Oceans’ 99, MTS/IEEE. Riding the Crest into the 21st Century, Conference and Exhibition, Conference Proceedings (IEEE Cat. No. 99CH37008), Seattle, WA, USA, 13–16 September 1999; IEEE: Piscataway, NJ, USA, 1999; pp. 1019–1024. [Google Scholar]
- Stigebrandt, A.; Liljebladh, B.; De Brabandere, L.; Forth, M.; Granmo, Å.; Hall, P.; Hammar, J.; Hansson, D.; Kononets, M.; Magnusson, M. An experiment with forced oxygenation of the deepwater of the anoxic by Fjord, western Sweden. Ambio 2015, 44, 42–54. [Google Scholar] [CrossRef] [PubMed]
- Antonini, A.; Gaeta, M.G.; Lamberti, A. Wave-induced devices for the oxygenation of deep layer: A physical investigation. Coast. Eng. Proc. 2012, 1, 56. [Google Scholar] [CrossRef]
- Xiao, C.; Fan, W.; Qiang, Y.; Xu, Z.; Pan, Y.; Chen, Y. A tidal pump for artificial downwelling: Theory and experiment. Ocean Eng. 2018, 151, 93–104. [Google Scholar] [CrossRef]
- Sato, T.; Tonoki, K.; Yoshikawa, T.; Tsuchiya, Y. Numerical and hydraulic simulations of the effect of Density Current Generator in a semi-enclosed tidal bay. Coast. Eng. 2006, 53, 49–64. [Google Scholar] [CrossRef]
- Ouchi, K.; Otsuka, K.; Nakatani, N.; Yamatogi, T.; Awashima, Y. Effects of density current generator in semi-enclosed bay. In Proceedings of the OCEANS 2008-MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–5. [Google Scholar]
- Margheritini, L.; Claeson, L. An innovative way of utilizing wave energy to counteract eutrophication and hypoxia. In Proceedings of the 9th European Wave and Tidal Conference (EWTEC), Southampton, UK, 5–9 September 2011. [Google Scholar]
- Antonini, A.; Lamberti, A.; Archetti, R. Oxyflux, an innovative wave-driven device for the oxygenation of deep layers in coastal areas: A physical investigation. Coast. Eng. 2015, 104, 54–68. [Google Scholar] [CrossRef]
- Antonini, A.; Lamberti, A.; Archetti, R.; Miquel, A.M. CFD investigations of OXYFLUX device, an innovative wave pump technology for artificial downwelling of surface water. Appl. Ocean Res. 2016, 61, 16–31. [Google Scholar] [CrossRef]
- Yang, D.; Zhou, Z.Q.; Zhang, J.S.; Liu, T.T.; Li, X.-J.; Ai, B.-H.; Li, B.-Q.; Chen, L.L. Characteristics of macrobenthic communities at the Muping marine ranch of Yantai in summer. Mar. Sci. 2017, 41, 134–143. [Google Scholar]
- Chuankun, W.; Shi, W. The ocean resources and reserves evaluation in China. In Proceedings of the 1st National Symposium on Ocean Energy, Hangzhou, China, 12–14 June 2008; pp. 169–179. [Google Scholar]
- Liu, H.W.; Ma, S.; Wei, L.; Gu, H.G.; Lin, Y.G.; Sun, X.J. A review on the development of tidal current energy in China. Renew. Sustain. Energy Rev. 2011, 15, 1141–1146. [Google Scholar] [CrossRef]
- Fan, W.; Chen, J.; Pan, Y.; Huang, H.; Chen, C.-T.; Chen, Y. Experimental study on the performance of an air-lift pump for artificial upwelling. Ocean Eng. 2013, 59, 47–57. [Google Scholar] [CrossRef]
- Hsieh, C.; Huang, P.; Li, D.; Chu, L.; Wu, C.; Liang, N. Artificial upwelling induced by ocean currents—Theory and experiment. Ocean Eng. 1978, 5, 83–94. [Google Scholar] [CrossRef]
- Wang, J. Calculation of the Equivalent Diameter in the Pipeline. J. Liaoning Univ. Petro. Chem. Tech. 2005, 3, 69–70. [Google Scholar]
- Zhang, L. Rectangular Duct’s Equivalent Diameter. Environ. Eng. 2014, S1, 975–978. [Google Scholar]
- Korson, L.; Drost-Hansen, W.; Millero, F.J. Viscosity of water at various temperatures. J. Phys. Chem. 1969, 73, 34–39. [Google Scholar] [CrossRef]
- Coe, J.R., Jr.; Godfrey, T.B. Viscosity of Water. J. Appl. Phys. 1944, 15, 625–626. [Google Scholar] [CrossRef]
- Oster, G. Density gradients. Sci. Am. 1965, 213, 70–79. [Google Scholar] [CrossRef]
- Cushman-Roisin, B.; Beckers, J.-M. Introduction to Geophysical Fluid Dynamics: Physical and Numerical Aspects; Academic Press: Oxford, UK, 2011; Volume 101. [Google Scholar]
- Xiao, C.; Fan, W.; Yao, Z.; Qiang, Y.; Pan, Y.; Chen, Y. On the total entrained flow rate of artificial downwelling. Ocean Eng. 2019, 181, 13–28. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Supply | Engineering Techniques | Application Site | Applicable Sea Condition | Author |
|---|---|---|---|---|
| Thermal energy | Density current generator (DCG) | Gokasho Bay | Coastal ocean with large water temperature difference No vertical advection between the warm surface layer and the cold bottom water | Ouchi & Nakahara, 1999 |
| Electric energy | Baltic deepwater oxygenation (BOX) | By Fjord | Sea areas convenient for erecting electric grid | Stigebrandt et al., 2015 |
| Wave energy | OXYFLUX | North Adriatic Sea | Sea areas with waves and fluctuations, even small waves of the mild season | Antonini, Gaeta, & Lamberti, 2012 |
| Tidal energy | Tidal pump | Changjiang Estuary | Sea areas with abundant tidal energy | Xiao et al., 2018 |
| Model | Prototype | |
|---|---|---|
| Tube length L (m) | 0.6 | 6 |
| Section length of the tube a (m) | 0.06, 0.08, 0.10, 0.12 | 0.6, 0.8, 1.0, 1.2 |
| Section width of the tube b (m) | 0.03, 0.04, 0.05, 0.06 | 0.3, 0.4, 0.5, 0.6 |
| Equivalent diameter of the tube (m) | 0.04, 0.0533, 0.0667, 0.08 | 0.4, 0.533, 0.667, 0.8 |
| Bend radius of the tube R (m) | 0.06, 0.08 0.10, 0.12 | 0.6, 0.8, 1.0, 1.2 |
| Roughness (mm) | 0.12 | 0.0015 (McGovern, 2011) |
| Mean water level (m) | 1.8 | 18 |
| Depth below pycnocline (m) | 0.6 | 6 |
| Immersed depth below pycnocline (m) | 0.4 | 4 |
| Horizontal velocity of currents (m/s) | 0.05–0.15 | 0.16–0.47 |
| Water density at the tube inlet (kg/m3) | 999.1 (T = 15 °C) | 1020.0, 1020.5, 1021.0 |
| Water density at the tube outlet (kg/m3) | 999.6, 1000.1, 1000.6 | 1021.5 |
| Density difference head (cm) | 0.02001, 0.04004, 0.06005 | 0.1959, 0.3920, 0.5882 |
| Case | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1-1 | 40 | 179.8 | 0.0566 | 0.0728 | 999.1 | 999.6 | 0.2302 | 1021.0 | 1021.5 |
| 1-2 | 40 | 179.8 | 0.081 | 0.1042 | 999.1 | 999.6 | 0.3295 | 1021.0 | 1021.5 |
| 1-3 | 40 | 179.8 | 0.106 | 0.1363 | 999.1 | 999.6 | 0.4310 | 1021.0 | 1021.5 |
| 1-4 | 40 | 179.8 | 0.150 | 0.1929 | 999.1 | 999.6 | 0.57 | 1021.0 | 1021.5 |
| 2-1 | 40 | 180.2 | 0.0553 | 0.0711 | 999.1 | 1000.1 | 0.2248 | 1020.5 | 1021.5 |
| 2-2 | 40 | 180.2 | 0.082 | 0.1055 | 999.1 | 1000.1 | 0.3336 | 1020.5 | 1021.5 |
| 2-3 | 40 | 180.2 | 0.103 | 0.1325 | 999.1 | 1000.1 | 0.4190 | 1020.5 | 1021.5 |
| 2-4 | 40 | 180.2 | 0.144 | 0.1852 | 999.1 | 1000.1 | 0.55 | 1020.5 | 1021.5 |
| 3-1 | 40 | 180.5 | 0.057 | 0.0733 | 999.1 | 1000.6 | 0.2318 | 1020.0 | 1021.5 |
| 3-2 | 40 | 180.5 | 0.085 | 0.1093 | 999.1 | 1000.6 | 0.3456 | 1020.0 | 1021.5 |
| 3-3 | 40 | 180.5 | 0.107 | 0.1376 | 999.1 | 1000.6 | 0.4351 | 1020.0 | 1021.5 |
| 3-4 | 40 | 180.5 | 0.147 | 0.1891 | 999.1 | 1000.6 | 0.588 | 1020.0 | 1021.5 |
| 4-1 | 53.3 | 179.7 | 0.058 | 0.0702 | 999.1 | 999.6 | 0.222 | 1021.0 | 1021.5 |
| 4-2 | 53.3 | 179.7 | 0.088 | 0.1066 | 999.1 | 999.6 | 0.3371 | 1021.0 | 1021.5 |
| 4-3 | 53.3 | 179.7 | 0.111 | 0.1345 | 999.1 | 999.6 | 0.4253 | 1021.0 | 1021.5 |
| 4-4 | 53.3 | 179.7 | 0.146 | 0.1769 | 999.1 | 999.6 | 0.5594 | 1021.0 | 1021.5 |
| 5-1 | 53.3 | 180.1 | 0.0563 | 0.0682 | 999.1 | 1000.1 | 0.2157 | 1020.5 | 1021.5 |
| 5-2 | 53.3 | 180.1 | 0.086 | 0.1042 | 999.1 | 1000.1 | 0.3295 | 1020.5 | 1021.5 |
| 5-3 | 53.3 | 180.1 | 0.109 | 0.1321 | 999.1 | 1000.1 | 0.4177 | 1020.5 | 1021.5 |
| 5-4 | 53.3 | 180.1 | 0.142 | 0.1720 | 999.1 | 1000.1 | 0.5439 | 1020.5 | 1021.5 |
| 6-1 | 53.3 | 180.6 | 0.057 | 0.0691 | 999.1 | 1000.6 | 0.2185 | 1020.0 | 1021.5 |
| 6-2 | 53.3 | 180.6 | 0.088 | 0.1066 | 999.1 | 1000.6 | 0.3371 | 1020.0 | 1021.5 |
| 6-3 | 53.3 | 180.6 | 0.106 | 0.1284 | 999.1 | 1000.6 | 0.406 | 1020.0 | 1021.5 |
| 6-4 | 53.3 | 180.6 | 0.144 | 0.1745 | 999.1 | 1000.6 | 0.5518 | 1020.0 | 1021.5 |
| 7-1 | 66.7 | 180.0 | 0.060 | 0.0701 | 999.1 | 999.6 | 0.2217 | 1021.0 | 1021.5 |
| 7-2 | 66.7 | 180.0 | 0.089 | 0.1039 | 999.1 | 999.6 | 0.3286 | 1021.0 | 1021.5 |
| 7-3 | 66.7 | 180.0 | 0.110 | 0.1285 | 999.1 | 999.6 | 0.4064 | 1021.0 | 1021.5 |
| 7-4 | 66.7 | 180.0 | 0.148 | 0.1728 | 999.1 | 999.6 | 0.5464 | 1021.0 | 1021.5 |
| 8-1 | 66.7 | 180.3 | 0.0563 | 0.0657 | 999.1 | 1000.1 | 0.2078 | 1020.5 | 1021.5 |
| 8-2 | 66.7 | 180.3 | 0.086 | 0.1004 | 999.1 | 1000.1 | 0.3175 | 1020.5 | 1021.5 |
| 8-3 | 66.7 | 180.3 | 0.109 | 0.1273 | 999.1 | 1000.1 | 0.4026 | 1020.5 | 1021.5 |
| 8-4 | 66.7 | 180.3 | 0.142 | 0.1658 | 999.1 | 1000.1 | 0.5243 | 1020.5 | 1021.5 |
| 9-1 | 66.7 | 180.8 | 0.057 | 0.0666 | 999.1 | 1000.6 | 0.2106 | 1020.0 | 1021.5 |
| 9-2 | 66.7 | 180.8 | 0.088 | 0.1028 | 999.1 | 1000.6 | 0.3251 | 1020.0 | 1021.5 |
| 9-3 | 66.7 | 180.8 | 0.106 | 0.1238 | 999.1 | 1000.6 | 0.3915 | 1020.0 | 1021.5 |
| 9-4 | 66.7 | 180.8 | 0.144 | 0.1682 | 999.1 | 1000.6 | 0.5319 | 1020.0 | 1021.5 |
| 10-1 | 80 | 180.5 | 0.060 | 0.0683 | 999.1 | 999.6 | 0.216 | 1021.0 | 1021.5 |
| 10-2 | 80 | 180.5 | 0.087 | 0.0991 | 999.1 | 999.6 | 0.3134 | 1021.0 | 1021.5 |
| 10-3 | 80 | 180.5 | 0.113 | 0.1287 | 999.1 | 999.6 | 0.407 | 1021.0 | 1021.5 |
| 10-4 | 80 | 180.5 | 0.148 | 0.1686 | 999.1 | 999.6 | 0.533 | 1021.0 | 1021.5 |
| 11-1 | 80 | 179.6 | 0.0563 | 0.0641 | 999.1 | 1000.1 | 0.2027 | 1020.5 | 1021.5 |
| 11-2 | 80 | 179.6 | 0.086 | 0.0980 | 999.1 | 1000.1 | 0.3099 | 1020.5 | 1021.5 |
| 11-3 | 80 | 179.6 | 0.111 | 0.1264 | 999.1 | 1000.1 | 0.3997 | 1020.5 | 1021.5 |
| 11-4 | 80 | 179.6 | 0.142 | 0.1617 | 999.1 | 1000.1 | 0.5113 | 1020.5 | 1021.5 |
| 12-1 | 80 | 179.8 | 0.057 | 0.0649 | 999.1 | 1000.6 | 0.205 | 1020.0 | 1021.5 |
| 12-2 | 80 | 179.8 | 0.088 | 0.1002 | 999.1 | 1000.6 | 0.3169 | 1020.0 | 1021.5 |
| 12-3 | 80 | 179.8 | 0.109 | 0.1242 | 999.1 | 1000.6 | 0.3928 | 1020.0 | 1021.5 |
| 12-4 | 80 | 179.8 | 0.146 | 0.1663 | 999.1 | 1000.6 | 0.5259 | 1020.0 | 1021.5 |
| Immersed Length of the Tube below Pycnocline | Horizontal Current Velocity | Downwelling Flow Rate | Compensated Downwelling Flow Rate | Time to Complete a Water Exchange | DO Supplemental Flux (g/s) | Time Needed to Increase Dissolved Oxygen by 1 mg/L |
|---|---|---|---|---|---|---|
| 5 | 0.1 | 0 | 0 | -- | -- | -- |
| 5 | 0.2 | 2.4 | 17.5 | 6.6 | 6.3 | 18.2 |
| 5 | 0.3 | 6.6 | 47.9 | 2.4 | 17.3 | 6.7 |
| 5 | 0.4 | 9.8 | 84.4 | 1.4 | 26.4 | 4.4 |
| 4 | 0.1 | 0 | 0 | -- | -- | -- |
| 4 | 0.2 | 3.4 | 20.2 | 5.8 | 8.8 | 13.2 |
| 4 | 0.3 | 7.0 | 47.1 | 2.5 | 18.3 | 6.3 |
| 4 | 0.4 | 10.1 | 82.0 | 1.4 | 27.0 | 4.3 |
| 3 | 0.1 | 0 | 0 | -- | -- | -- |
| 3 | 0.2 | 4.2 | 21.0 | 5.5 | 10.5 | 11.0 |
| 3 | 0.3 | 7.4 | 45.9 | 2.5 | 19.2 | 6.0 |
| 3 | 0.4 | 10.4 | 79.4 | 1.5 | 27.7 | 4.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, W.; Pan, D.; Xiao, C.; Lin, T.; Pan, Y.; Chen, Y. Experimental Study on the Performance of an Innovative Tide-Induced Device for Artificial Downwelling. Sustainability 2019, 11, 5268. https://doi.org/10.3390/su11195268
Fan W, Pan D, Xiao C, Lin T, Pan Y, Chen Y. Experimental Study on the Performance of an Innovative Tide-Induced Device for Artificial Downwelling. Sustainability. 2019; 11(19):5268. https://doi.org/10.3390/su11195268
Chicago/Turabian StyleFan, Wei, Dongdong Pan, Canbo Xiao, Tiancheng Lin, Yiwen Pan, and Ying Chen. 2019. "Experimental Study on the Performance of an Innovative Tide-Induced Device for Artificial Downwelling" Sustainability 11, no. 19: 5268. https://doi.org/10.3390/su11195268
APA StyleFan, W., Pan, D., Xiao, C., Lin, T., Pan, Y., & Chen, Y. (2019). Experimental Study on the Performance of an Innovative Tide-Induced Device for Artificial Downwelling. Sustainability, 11(19), 5268. https://doi.org/10.3390/su11195268