Augmented Reality Markerless Multi-Image Outdoor Tracking System for the Historical Buildings on Parliament Hill



Abstract
1. Introduction
2. Related Work
2.1. AR Experiences in Cultural Heritage
2.2. Tracking Outdoor
2.3. 3D Data Optimization
3. Materials and Methods
3.1. Mobile Device
3.2. Outdoor Tracking
3.3. Multitarget Outdoor Testing on Parliament Hill
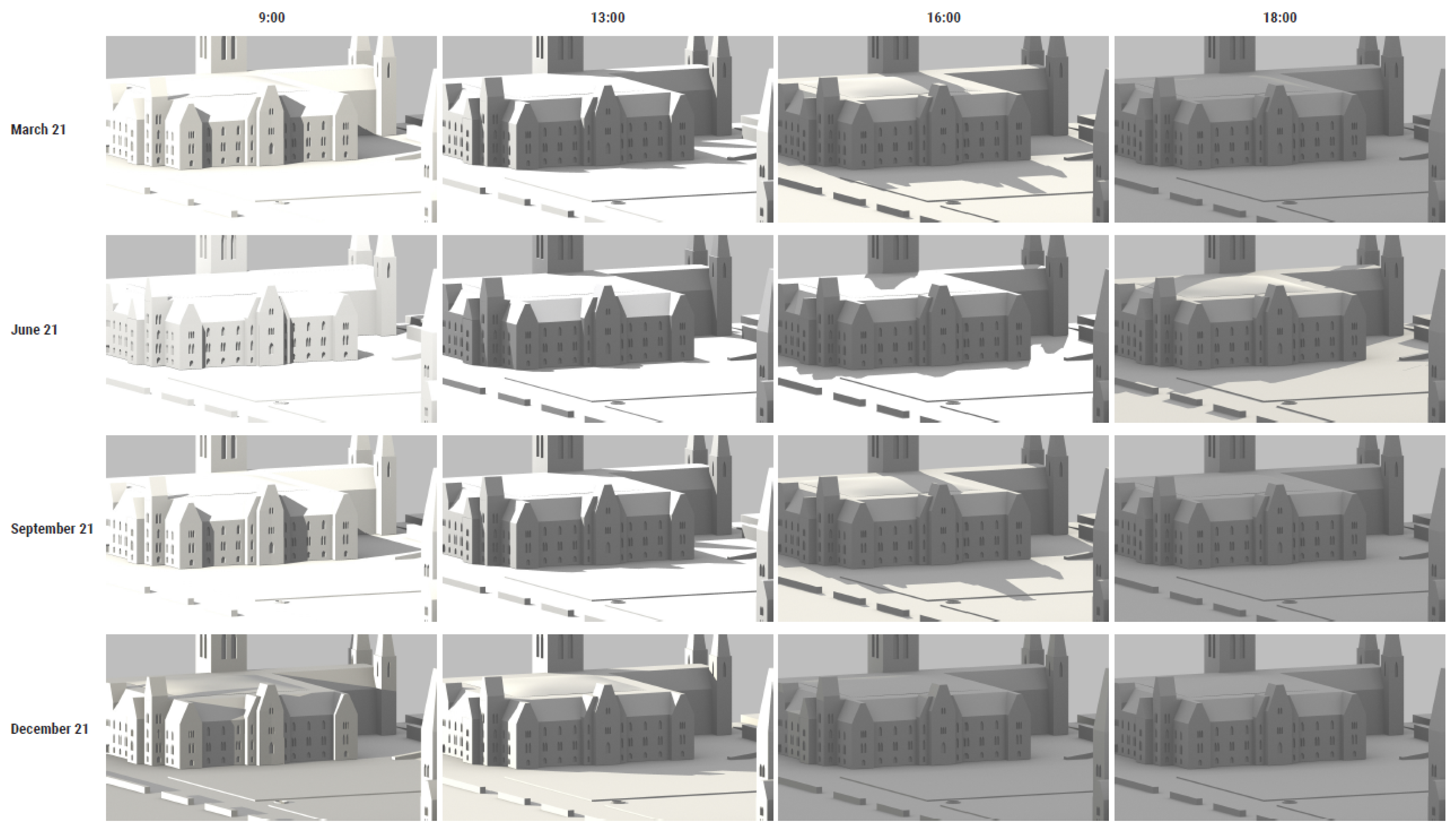
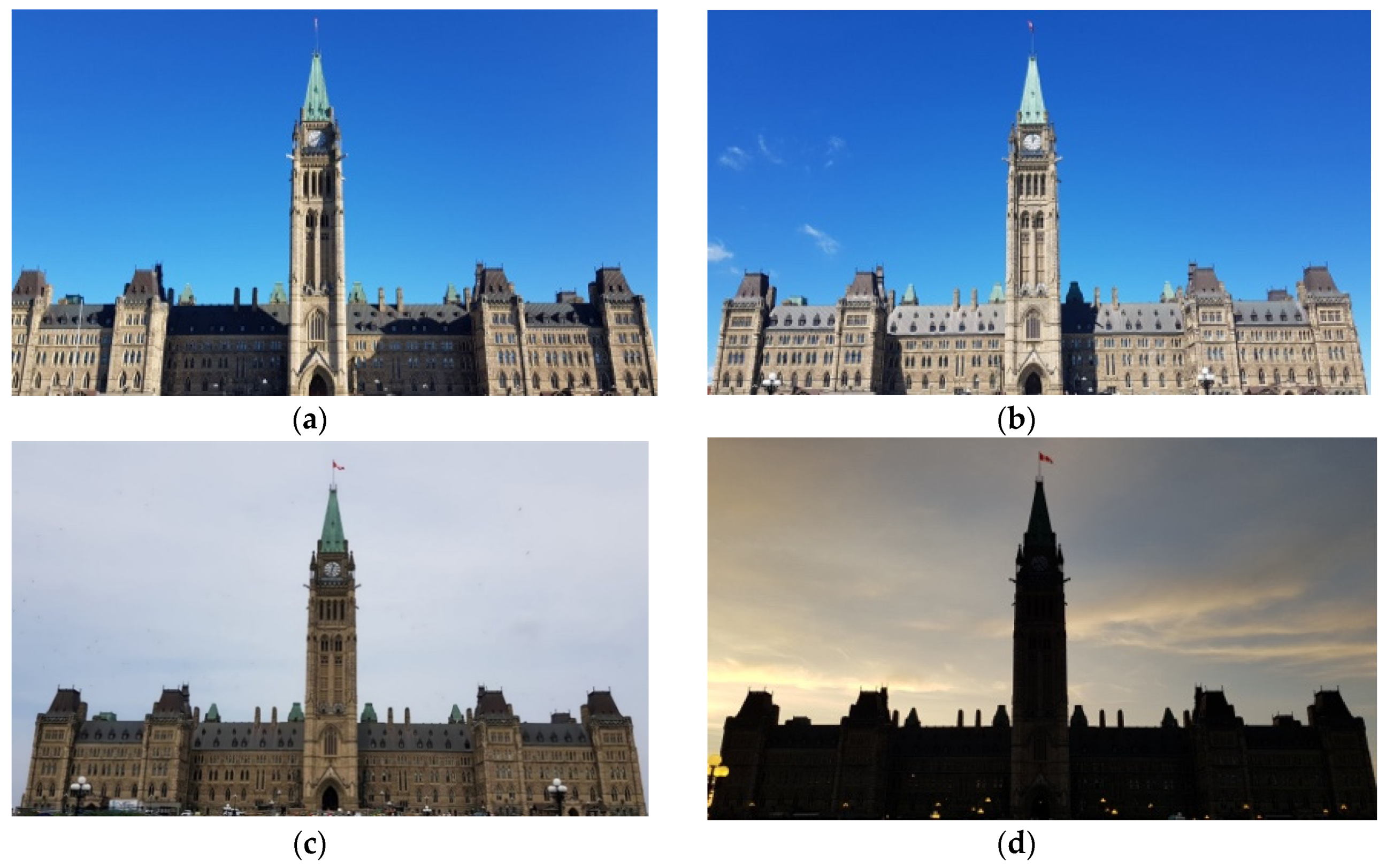
- West Block: From 18:00 on, the sun is behind the building. Therefore, there are no shadows but from 7:00 to 18:00 the orientation of the sun causes significant change to the image of the building (Figure 2). All tests performed on a sunny day detected the targets correctly. On cloudy days there are no shadows on this building; for this reason, the sunny 18:00 target works well in all the test cases on cloudy days and during sunset (Table 2).
3.4. Realism
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Azuma, R. A survey of augmented reality. Presence Teleoper. Virtual Environ. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- Bekele, M.K.; Pierdicca, R.; Frontoni, E.; Malinverni, E.S.; Gain, J. A Survey of Augmented, Virtual, and Mixed Reality for Cultural Heritage. J. Comput. Cult. Herit. 2018, 11, 1–36. [Google Scholar] [CrossRef]
- Gimeno, J.J.; Portalés, C.; Coma, I.; Fernández, M.; Martínez, B. Combining traditional and indirect augmented reality for indoor crowded environments. A case study on the Casa Batlló museum. Comput. Graph 2017, 69, 92–103. [Google Scholar] [CrossRef]
- Kolivand, H.; Rhalibi, A.; Sunar, M.S.; Saba, T. ReVitAge: Realistic virtual heritage taking shadows and sky illumination into account. J. Cult. Herit. 2018, 1–10. [Google Scholar] [CrossRef]
- Amakawa, J.; Westin, J. New Philadelphia: Using augmented reality to interpret slavery and reconstruction era historical sites. Int. J. Herit. Stud. 2018, 24, 315–331. [Google Scholar] [CrossRef]
- Kim, J.B.; Park, C. Development of mobile AR tour application for the national palace museum of Korea. Lect. Notes Comput. Sci. 2011, 6773, 55–60. [Google Scholar] [CrossRef]
- Barrile, V.; Fotia, A.; Bilotta, G.; Carlo, D. Integration of geomatics methodologies and creation of a cultural heritage app using augmented reality. Virtual Archaeol. Rev. 2019, 10, 40–51. [Google Scholar] [CrossRef]
- Pentenrieder, K.; Meier, P.; Klinker, G. Analysis of Tracking Accuracy for Single-Camera Square-Marker-Based Tracking. In Third Workshop on Virtual and Augmented Reality of the GI-Fachgruppe VR/AR, Koblenz, Germany, 2006. Available online: http://campar.in.tum.de/Chair/PublicationDetail?pub=pentenrieder2006gi (accessed on 1 August 2019).
- Kato, H.; Billinghurst, M. Marker tracking and HMD calibration for a video-based augmented reality conferencing system. In Proceedings of the 2nd IEEE and ACM International Workshop on Augmented Reality, San Francisco, CA, USA, 20–21 October 1999. [Google Scholar]
- Herling, J.; Broll, W. Markerless Tracking for Augmented Reality. In Handbook of Augmented Reality; Furht, B., Ed.; Springer: New York, NY, USA, 2011. [Google Scholar]
- Azuma, R.; Hoff, B.; Neely, H.; Sarfaty, R. A motion-stabilized outdoor augmented reality system. In Proceedings of the IEEE Virtual Reality (Cat. No. 99CB36316), Houston, TX, USA, 13–17 March 1999. [Google Scholar]
- Cirulis, A.; Brigmanis, K.B. 3D outdoor augmented reality for architecture and urban planning. Procedia Comput. Sci. 2013, 25, 71–79. [Google Scholar] [CrossRef]
- Reitmayr, G.; Drummond, T. Going out: Robust model-based tracking for outdoor augmented reality. In Proceedings of the 2006 IEEE/ACM International Symposium on Mixed and Augmented Reality, Santa Barbard, CA, USA, 22–25 October 2006. [Google Scholar]
- You, S.; Neumann, U.; Azuma, R. Orientation tracking for outdoor augmented reality registration. IEEE Comput. Graph. Appl. 1999, 19, 36–42. [Google Scholar] [CrossRef]
- Wither, J.; Tsai, Y.T.; Azuma, R. Indirect augmented reality. Comput. Graph. 2011, 35, 810–822. [Google Scholar] [CrossRef]
- Okura, F.; Akaguma, T.; Sato, T.; Yokoya, N. Indirect augmented reality considering real-world illumination change. In Proceedings of the 2014 IEEE International Symposium on Mixed and Augmented Reality, Munich, Germany, 10–12 September 2014. [Google Scholar]
- Sörös, G.; Seichter, H.; Rautek, P.; Gröller, E. Augmented visualization with natural feature tracking. In Proceedings of the 10th International Conference on Mobile and Ubiquitous Multimedia, Beijing, China, 7–9 December 2011. [Google Scholar]
- Uchiyama, H.; Marchand, E. Object Detection and Pose Tracking for Augmented Reality: Recent Approaches. In Proceedings of the 18th Korea-Japan Joint Workshop on Frontiers of Computer Vision, Kawasaki, Japan; 2012; pp. 1–8. Available online: https://www.researchgate.net/publication/264846831_Object_Detection_and_Pose_Tracking_for_Augmented_Reality_Recent_Approaches (accessed on 1 August 2019).
- Radkowski, R.; Oliver, J. Natural feature tracking augmented reality for on-site assembly assistance systems. In Lecture Notes in Computer Science; Shumaker, R., Ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Moreels, P.; Perona, P. Evaluation of Feature Detectors and Descriptors based on 3D Objects. Int. J. Comput. Vis. 2007, 73, 263–284. [Google Scholar] [CrossRef]
- Carozza, L.; Tingdahl, D.; Bosché, F.; Gool, L. Markerless vision-based augmented reality for urban planning. Comput. Civ. Infrastruct. Eng. 2014, 29, 2–17. [Google Scholar] [CrossRef]
- Rao, J.; Qiao, Y.; Ren, F.; Wang, J.; Du, Q. A Mobile Outdoor Augmented Reality Method Combining Deep Learning Object Detection and Spatial Relationships for Geovisualization. Sensors 2017, 17, 1951. [Google Scholar] [CrossRef] [PubMed]
- Hoppe, H.; Derose, T.; Mcdonald, J.; Stuetzle, W.; Duchamp, T. Mesh Optimization. In Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 2–6 August 1993. [Google Scholar] [CrossRef]
- Rossignac, J.; Borrel, P. Multi-resolution 3D approximations for rendering complex scenes. Model. Comput. Graph. 1993, 455–465. [Google Scholar] [CrossRef]
- Gross, M.H.; Member, A.; Staadt, O.G.; Gatti, R. Efficient Triangular Surface Appr Using Wavelets and Quadtree Dat. IEEE Trans. Vis. Comput. Graph. 1996, 2, 130–143. [Google Scholar] [CrossRef]
- Botsch, M.; Pauly, M.; Rossl, C.; Bischoff, S.; Kobbelt, L. Geometric modeling based on triangle meshes. In Proceedings of the ACM SIGGRAPH 2006 Courses, Boston, MA, USA, 30 July–3 August 2006. [Google Scholar] [CrossRef]
- Pietroni, N.; Tarini, M.; Cignoni, P. Almost isometric mesh parameterization through abstract domains. IEEE Trans. Vis. Comput. Graph. 2009, 16, 621–635. [Google Scholar] [CrossRef]
- Khan, D.; Yan, D.M.; Ding, F.; Zhuang, Y.; Zhang, X. Surface remeshing with robust user-guided segmentation. Comput. Vis. Media 2018, 4, 113–122. [Google Scholar] [CrossRef]
- Guidi, G.; Remondino, F.; Russo, M.; Menna, F.; Rizzi, A.; Ercoli, S. A Multi-Resolution Methodology for the 3D Modeling of Large and Complex Archeological Areas. Int. J. Archit. Comput. 2009, 7, 39–55. [Google Scholar] [CrossRef]
- Akenine-Möller, T.; Haines, E.; Hoffman, N. Real-Time Rendering, 3rd ed.; A K Peters: Natick, MA, USA; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Remondino, F.; El-Hakim, S. Image-Based 3D Modelling: A Review. Photogramm. Rec. 2006, 21, 269–291. [Google Scholar] [CrossRef]
- Zhu, L.; Hyyppa, J.; Chen, R.; Liu, Z. An approach of 3D model simplification for mobile phone based navigation application. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service, Kirkkonummi, Finland, 14–15 October 2010; pp. 2–5. [Google Scholar]
- Bruno, F.; Bruno, S.; Sensi, G.; Luchi, M.L.; Mancuso, S.; Muzzupappa, M. From 3D reconstruction to virtual reality: A complete methodology for digital archaeological exhibition. J. Cult. Herit. 2010, 11, 42–49. [Google Scholar] [CrossRef]
- Comes, R.; Neamțu, C.; Buna, Z.; Badiu, I.; Pupeză, P. Methodology to Create 3D Models for Augmented Reality Applications Using Scanned Point Clouds, Mediterr. Archaeol. Archaeom. 2014, 14, 35–44. [Google Scholar]
- Unity, The Photogrammetry Workflow. 2018. Available online: https://unity.com/solutions/photogrammetry. (accessed on 1 September 2018).
- Blanco-Pons, S.; Carrión-Ruiz, B.; Lerma, J.L. Review of Augmented Reality and Virtual Reality Techniques. In Proceedings of the 8th International Congress on Archaeology, Computer Graphics, Cultural Heritage and Innovation, Valencia, Spain, 5–7 September 2016. [Google Scholar] [CrossRef]
- Behzadan, A.H.; Kamat, V.R. Scalable algorithm for resolving incorrect occlusion in dynamic augmented reality engineering environments. Comput. Civ. Infrastruct. Eng. 2010, 25, 3–19. [Google Scholar] [CrossRef]
- Tian, Y.; Long, Y.; Xia, D.; Yao, H.; Zhang, J. Handling occlusions in augmented reality based on 3D reconstruction method. Neurocomputing 2015, 156, 96–104. [Google Scholar] [CrossRef]
- Berger, M.O. Resolving occlusion in augmented reality: A contour based approach without 3D reconstruction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, FL, USA, 17–19 June 1997. [Google Scholar]
- Tian, Y.; Guan, T.; Wang, C. Real-time occlusion handling in augmented reality based on an object tracking approach. Sensors 2010, 10, 2885–2900. [Google Scholar] [CrossRef]
- Shang, L.W.; Zakaria, M.H.; Ahmad, I. Mobile phone augmented reality postcard. J. Telecommun. Electron. Comput. Eng. 2016, 8, 135–139. [Google Scholar]
- Sunil, S.; Nair, S.S.K. An Educational Augmented Reality App to Facilitate Learning Experience. Int. Conf. Comput. Appl. ICCA 2017, 2017, 279–282. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphone | Operating System (OS) | Application Programming Interface (API) | Processor | Screen | Camera | Memory RAM | Storage |
|---|---|---|---|---|---|---|---|
Samsung S8 | Android | 8.0 Oreo | Exynos 9 Octa 8895 (2.3 GHz Quad + 1.7 GHz Quad CPU), GPU ARM Mali-G71 MP20 (546 MHz) | 5.8” 1.440 × 2.960 pixels 18.5:9 aspect ratio | 12MP AF, ƒ/1.7 Pixel size: 1.4µm Sensor size: 1/2.55” FOV: 77, Auto HDR, OIS (Optical Image Stabilization) Sensor size: 1/3.6” FOV: 80 | 4 GB RAM | 64 GB |
| SUNNY | CLOUDY | SUNSET | |||||
|---|---|---|---|---|---|---|---|
| WEST BLOCK | |||||||
| TARGET SUNNY 8 AM | 31-07-18 8:34 | ||||||
| TARGET SUNNY 1 PM | 16-08-18 13:20 | ||||||
| TARGET SUNNY 6 PM | 16-08-18 18:26 | 02-08-18 8:45 | 03-08-18 12:30 | 30-07-18 18:15 | 09-08-18 20:30 | ||
| CENTRE BLOCK | |||||||
| TARGET SUNNY 8 AM | 31-07-18 08:23 | ||||||
| TARGET SUNNY 1 PM | 16-08-18 13:20 | ||||||
| TARGET CLOUDY 6 PM | 16-08-18 18:18 | 02-08-18 08:05 | 03-08-18 12:30 | 30-07-18 18:15 | 09-08-18 20:20 | ||
| TARGET CLOUDY 9 PM | 16-08-18 18:18 | 03-08-18 12:30 | 09-08-18 20:47 | ||||
| EAST BLOCK | |||||||
| TARGET CLOUDY 3PM | 31-07-18 08:20 | 16-08-18 13:35 | 16-08-18 18:34 | 02-08-18 08:25 | 03-08-18 12:49 | 30-07-18 18:20 | 09-08-18 20:39 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blanco-Pons, S.; Carrión-Ruiz, B.; Duong, M.; Chartrand, J.; Fai, S.; Lerma, J.L. Augmented Reality Markerless Multi-Image Outdoor Tracking System for the Historical Buildings on Parliament Hill. Sustainability 2019, 11, 4268. https://doi.org/10.3390/su11164268
Blanco-Pons S, Carrión-Ruiz B, Duong M, Chartrand J, Fai S, Lerma JL. Augmented Reality Markerless Multi-Image Outdoor Tracking System for the Historical Buildings on Parliament Hill. Sustainability. 2019; 11(16):4268. https://doi.org/10.3390/su11164268
Chicago/Turabian StyleBlanco-Pons, Silvia, Berta Carrión-Ruiz, Michelle Duong, Joshua Chartrand, Stephen Fai, and José Luis Lerma. 2019. "Augmented Reality Markerless Multi-Image Outdoor Tracking System for the Historical Buildings on Parliament Hill" Sustainability 11, no. 16: 4268. https://doi.org/10.3390/su11164268
APA StyleBlanco-Pons, S., Carrión-Ruiz, B., Duong, M., Chartrand, J., Fai, S., & Lerma, J. L. (2019). Augmented Reality Markerless Multi-Image Outdoor Tracking System for the Historical Buildings on Parliament Hill. Sustainability, 11(16), 4268. https://doi.org/10.3390/su11164268