1. Introduction
In recent years, an increasing consciousness in sustainable warehousing and energy efficient operations in warehousing has come about, due to both the growing of green awareness and energy resource scarcity [
1]. The interest shown by companies on issues related to sustainability in logistics is highlighted by the increasing number of works on lean and green logistics [
2].
This trend has been especially verified with regards to Automated Storage and Retrieval Systems (AS/RS) [
3,
4], where energy saving, both in terms of energy efficiency and reduction of carbon dioxide emissions, has become one of the most significant performances to be achieved within a sustainable perspective [
5].
Indeed, recent studies show that the traditional time-based perspective has been overcome by the importance of sustainable and energy efficient operations in material handling processes [
6].
This trend is confirmed by results of the 2019 Material Handling Institute (MHI) survey on sustainability in warehousing, distribution and manufacturing [
7], which have highlighted the importance given by management to implement sustainablility programs in the supply chain.
In order to meet the need for energy efficiency, many contributions have been developed offering approaches towards more sustainable warehousing, for instance, related to energy efficient material-handling equipment and energy recovery systems [
8].
Regarding material-handling equipment, autonomous warehousing is increasingly moving beyond traditional crane-based AS/RS technologies (CBAS/RS) to Autonomous Vehicle Storage and Retrieval Systems AVS/RS technologies. This is because AVS/RS has a substantial flexibility with respect to throughput capacity in the transfer of Unit Loads (ULs) with high density storage. Moreover, AVS/RS are based on the use of light vehicles that provide less energy consumption than stacker cranes [
9]. In this technology, throughput capacity can be modified by changing the number of Automatic Vehicles (AVs) in the system, and lifts are used to provide the vertical movement for transactions between AVs and the Storage Rack (SR). Other subsets of AVS/RS have been developed, such as the Shuttle-Based Storage and Retrieval System (SBS/RS), with the aim of providing more flexibility and less energy consumption, but they are often limited in weight load and they do not have high-density storage.
Each vehicle used in an AVS/RS typically moves repetitively along a fixed path, with a motion that is characterized by repetitive acceleration, constant and deceleration steps. For example, the lift that moves along the vertical rails initially accelerates to its steady-state speed (or minor speed if the distance is short enough) and then decelerates before reaching the final position. During descending or deceleration phases, energy is typically converted into waste heat, but now some manufacturers are offering the option of equipping AS/RS machines with energy-recovery modules so that energy otherwise dissipated can be regenerated into the power supply system. This is achieved through an electro-mechanical regenerative braking system (RBS) that converts kinetics energy into electricity by using the driving motor in reverse and operating it as a generator during deceleration [
10].
Regarding energy recovery systems, in the last decade, the developments in this field have encouraged researchers and practicioners to deepen studies in driving applications [
11]. As an example, in AVS/RS and SBS/RS energy can be recovered both from braking the lifting table and from that of the shuttle carrier [
12]. Therefore, there is a need for further research that can provide a practical study.
Accordingly, our aim is to provide an energy evaluation based on real-case data for the deep-lane variant of AVS/RS, where racks have multiple-depth channels travelled by a satellite and energy can be recovered from the braking phase of the lift. In order to do that, a simulator has been devoloped to emulate a real-case application, showing energy consumption and recovery and comparing the same metrics with a traditional crane-based AS/RS.
This work represents the output of an applied research project named “MAG-IA” (Intelligent and flexible warehouse management systems for Industry 4.0), which aims to produce innovation in the field of automation that leads to greater sustainability in terms of energy impact in processes involving internal warehouse logistics. This project has been co-funded under Tuscany to foster the collaboration between universities and industries, according to an open innovation philosophy [
13] in order to improve the quality of innovation output [
14], the financial and R&D business performances [
15] and moreover, to improve the firm attitude towards Industry 4.0.
The paper is structured as follows: the next section presents the literature review, focusing on energy evaluation and energy recovery of AVS/RS. In
Section 3 there is the problem setting and the methodology used for of this work, while
Section 4 presents the modeling of the whole system, including the energy consumption and recovery models. Then in
Section 5 our case-study is presented and results are shown. In
Section 6 there is the discussion while conclusions and future research are presented in
Section 7.
2. Literature Review
The study on sustainability in warehouse logistics involves different research fields, such as transportation planning, warehouse management and material handling.
Our literature review focuses on a particular automatic material handling system used inside a warehouse, that is the AVS/RS. This system was first introduced into European facilities in the late 1990s. Despite its increasing diffusion in companies, there are no standards available to provide performance evaluation criteria.
The first studies on performance evaluation of AVS/RS have been conducted by Malmborg [
16,
17]. With reference to a “tier to tier” configuration, in which shuttles can access any aisle in any tier, models were proposed to estimate vehicle utilization and cycle time, and also predicting the proportion of dual command (DC) cycles compared to the single command (SC) cycles. Since those works, many studies have been conducted to estimate time evaluation of AVS/RS, mainly based on analytical models and/or queue theory. Relevant examples are given by Kuo et al., Fukunari and Malmborg [
18,
19,
20] for “tier to tier” configurations and by Marchet et al. and Heragu et al. [
21,
22] for the “tier captive”, which includes a dedicated shuttle for each tier. Recently, simulation-based approaches have been taken into account for the same purpose, such as in the works of Ekren et al. [
23,
24] and in the work of Ekren and Heragu [
25], where the simulation has been used to conduct a regression analysis to explore the relationship between performance and input factors, such as the number of aisles and of tiers. Simulation is also used by Xia et al. [
26] to study how order density and shelf structure (i.e., the number of rows and columns of storage shelves) affect time performances of an AVS/RS.
The deep-lane AVS/RS has been studied by D’Antonio et al. and Manzini et al. [
9,
27], where travel-times and travel-distances of lift, shuttle and satellite have been proposed and tested through analytical models and simulation for different layouts and storage criteria.
Analogous techniques have been exploited to evaluate energy consumption and recovery in AS/RS, for example in the works of Meneghetti and Monti [
28,
29], but much fewer articles can be found in the current literature with regards to AVS/RS.
This evidence is confirmed by a recent review about green warehousing provided by Bartolini et al. [
30], whose topics include energy consumption studies of AS/RS but with just one paper referring to AVS/RS (Tappia et al. [
8]).
The first proposal of a methodology that allows the evaluation of energy consumption of AVS/RS is given by Bruno et al. [
31], that designed a discrete event simulation of a AVS/RS.
In the study of Borovinšek et al. [
32], a genetic algorithm has been used to provide the Pareto front to choose a tradeoff between minimization of time and energy in a SBS/RS.
Ekren et al. [
33] propose an analytical model-based tool that can estimate the mean and the variance of travel time of lifts and shuttles, as well the mean amount of energy consumption and energy regeneration per transaction. This is achieved through probabilistic assumptions. Results are presented for different configurations of the system.
Akpunar et al. conducted [
34] a study on energy efficient design, studying several design inputs such as number of tiers, aisles, AVs as decision variables. After calculating travel times and energy consumptions for AVs and lifts, the decision variables are combined in 81 different ways and results are obtained through simulation.
In summary, as highlighted in
Table 1, since the early 2000s, several studies have been performed on AVS/RS, but none of the examined works studied energy evaluation for the deep-lane AVS/RS. This work proposes to provide an energy evaluation for this variant of AVS/RS by modeling and simulating such a warehouse, giving insights about energy consumption and recovery.
4. Modeling
4.1. Warehouse Modeling
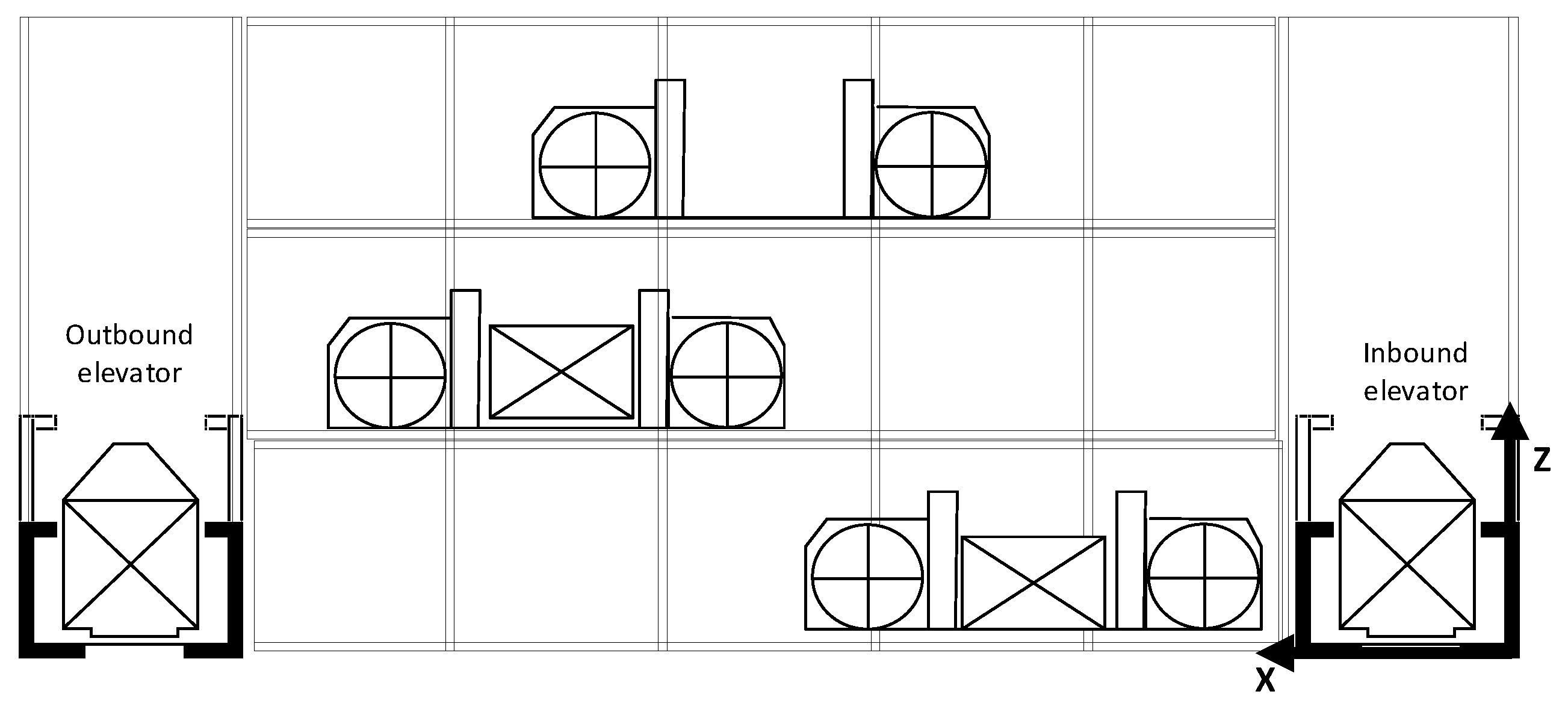
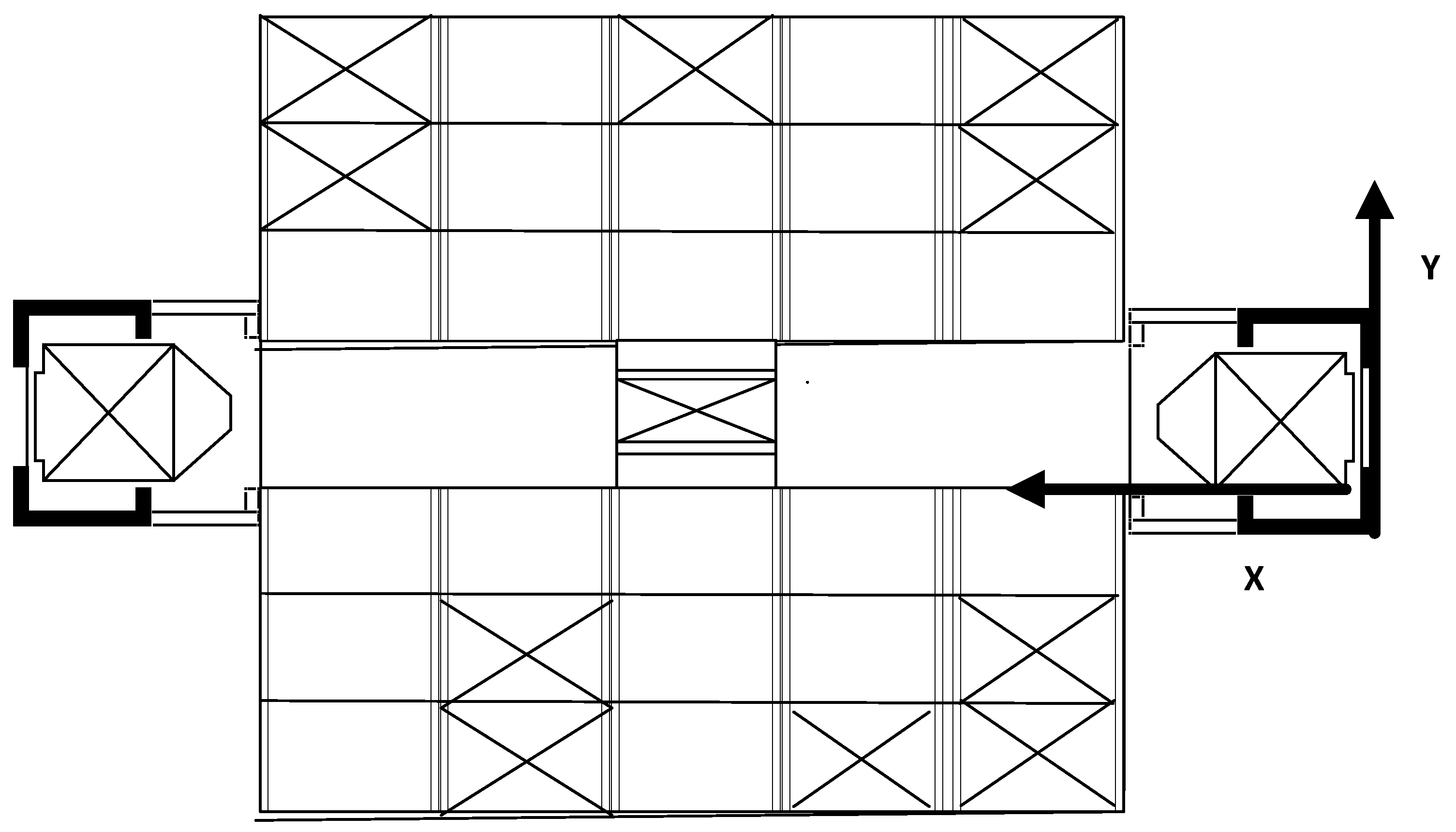
The deep-lane AVS/RS consists of a SR and of the three different kinds of autonomous vehicles that separate the movements along the vertical, longitudinal and transverse directions.
The SR is organized as follows:
tiers;
channels for each tier ( channels for each side, 2 sides for each tier);
cells for each channel.
Each channel is accessible from only one side, according to Last-In-First-Out (LIFO) logic, so that it must contain only Unit Load (UL) of the same type. Hence, the number of different ULs is given by the product ; the overall capacity of the rack is equal to .
The kinds of autonomous vehicles used are:
The lift, which is in charge of the vertical movement;
The shuttle, that moves along the central aisle;
The satellite, which is the storage/retrieval machine able to move through the channel.
There are 2 lifts placed on the opposite sides of the rack (inbound and outbound zones), 1 shuttle for each tier and 1 satellite for each shuttle. One lift is used for the storage of ULs, while the other one is used for the retrieval of Uls. Each lift is equipped with an RBS to recover energy during its braking phase. The configuration of the shuttle is ‘tier-captive’ while the satellite’s one is ‘channel-captive’, in the meaning that the shuttle can only move across the central aisle (i.e., at the same tier), while the satellite can only move inside the channel. In this configuration, the satellite is always attached to the shuttle and detaches from it only when it goes through the channel.
A graphical representation of the deep-lane AVS/RS is provided in
Figure 1 and
Figure 2. According to our reference system, a lift moves along the z-axis, a shuttle moves along the x-axis and a satellite moves along the y-axis.
4.2. Activity Modeling
The sequence of operations adopted to store a UL has been modeled as follows:
- 1.s
Inbound lift goes up to the selected tier;
- 2.s
Shuttle reaches the lift at the inbound zone;
- 3.s
Shuttle accommodates the UL;
- 4.s
Inbound lift goes down to the floor;
- 5.s
Shuttle reaches the correct channel;
- 6.s
Satellite detaches from shuttle;
- 7.s
Satellite reaches the correct cell in the channel;
- 8.s
Satellite releases the UL;
- 9.s
Satellite comes back to the shuttle;
- 10.s
Shuttle accommodates the satellite;
The sequence of operations adopted to retrieve a UL has been modeled as follows:
- 1.p
Shuttle reaches the correct channel;
- 2.p
Satellite detaches from shuttle;
- 3.p
Satellite reaches the correct cell in the channel;
- 4.p
Satellite lifts the UL;
- 5.p
Satellite comes back to the shuttle;
- 6.p
Shuttle accommodates the satellite;
- 7.p
Shuttle reaches the lift at the outbound zone;
- 8.p
Outbound lift goes up to the correct tier;
- 9.p
Outbound lift accommodates the UL;
- 10.p
Outbound lift goes down to the floor;
Each of these activities has been modeled considering its time and energy consumption, taking into account the single-command and no concurrent usage of the shuttles.
4.3. Time Modeling
Let us denote by and the set of activities considered for computing cycle times respectively for storing and picking:
as regards storing;
as regards picking.
This assumption has been done in order to make a fair evaluation. Indeed, a lift is often a bottleneck and is not always sold together with the other components of the deep-lane AVS/RS.
Certain activities have a fixed time for their execution. We call this fixed time, that is the same for all these activities, as , and we group the activities respectively in and sets:
as regards storing;
as regards picking.
All the remaining activities have a variable time that depends on the distance covered by the mobile component, accordingly to the description provided in
Section 3.1. A mobile component, that we call machine, can be the lift, the shuttle or the satellite.
The cinematic profile of each machine of the warehouse has been modeled considering a uniformly accelerated motion with a maximumalue for the velocity that can be reached, resulting in a trapezium velocity profile when this value is reached or in a triangle velocity one if the maximum value is not reached, as shown in
Figure 3. This profile is very common and known in literature for AVS/RS vehicles.
The travel time
required by any machine carrying a weight
for covering a distance
along the
i-axis with is:
where
is the distance covered by the machine before reaching its maximum speed. In our case
can be
if no UL is carried or 1 if a UL is carried.
In this way the cycle time
for storing can be computed as:
and analogously for cycle time
for picking.
4.4. Energy Consumption Modeling
The time modeling of the previous subsection can be used to model energy consumed by using also the machine power.
We use the travel time
required by any machine carrying a weight
for covering a distance
along the
i-axis modeling in order to compute the energy consumed
by the machine to accomplish the same mission. The computation of energy consumed is well-known in literature and its formula is:
where:
is the set of motion stages of machine for covering . If then contains acceleration and decelerations stages, else if then contains also the constant stage;
is the power needed in stage k by machine i carrying weight j;
is the duration of stage k by machine i carrying weight j, so that .
These formulas are implemented in the simulator for all activities in and in . It is important to denote that for activity 4.s and 10.p the energy consumed is equal to zero.
Each activity of and requires a fixed amount of energy equals to as these activities are not variable.
Hence, the energy
needed for storing a UL can be computed as:
and analogously for energy
needed for picking.
4.5. Energy Recovery Modeling
Regarding the energy recovery, this is basically a fraction of the gravitational potential energy, that is possible to be exploited during activities 4.s and 10.p thanks to the energy recovery system.
The analytical expression for energy recovery in the storage phase
, also applicable in other AS/RS application where there is a energy regeneration of the potential energy [
35], is:
and the one for the picking phase
is:
where:
is the overall efficiency of the electrical system;
is the weight of the lift;
is the weight of the UL;
is the gravity acceleration;
is the distance covered by the lift;
Finally, the analytical expression for energy balance
for a storage activity is:
and analogously for energy balance
for a picking activity:
All the components of the systems and all the activities presented in this section have been modeled through the computational software MATLAB®.
We also denote that for this work two basic algorithms for storing and retrieving ULs have been used. The working principle for storing is simply to prefer to store a non-full channel containing ULs of the same type or to store in a completely empty channel, while the one for retrieving is to prefer to pick from the fullest channel containing the same UL.
6. Discussion
Following the assumptions done in
Section 5.1, an energy evaluation of a deep-lane AVS/RS has been conducted. Results show a high stability of the metrics values, with a standard deviation that is less than the 5% of the mean value for all the metrics with the exception of “Energy recovered from storing”, for which the standard deviation represents the 7.6 % of the average value.
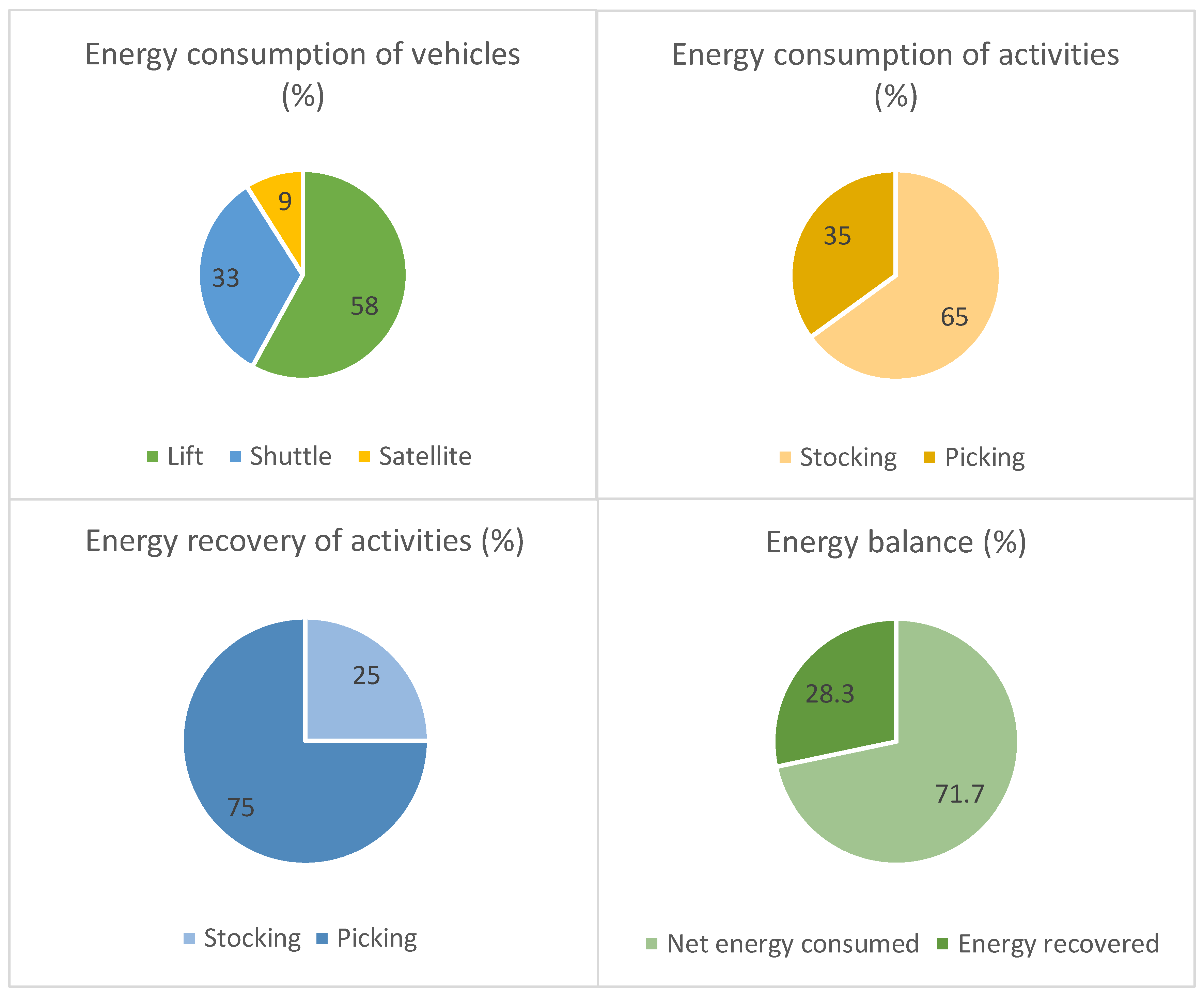
With regards to energy consumption, the lifts cover the 58% of the total energy expense, the shuttles cover the 33% and the satellites the remaining 9%. This is reasonable considering the differences among the powers of the machines, as reported in
Appendix A. The stocking phase covers the 65% of the total energy consumption, while the picking process is the residual 35%. This may be due to the different absorbed power of the inbound lift compared to the outbound lift: the first does the ascending phase with a UL and the descending phase without any load, the latter does the vice-versa.
On the other hand, the energy recovery is due to the picking for 75%, while the stocking allows for recovering the 25% of all energy regeneration. This fact can also be explained by the different load state of the two lifts.
Moreover, it is possible to see that in such a configuration, an average of 28.3% of energy expense can be recovered, that can be seen as a measure of energy sustainability of the system. This has been evaluated through the ratio of total energy recovered to total energy consumed.
A summary of all these quantitative considerations is provided by
Figure 4.
Finally, it is possible to make an approximate comparison between the total energy consumed of the deep-lane AVS/RS and the one of a CBAS/RS, whose average electrical power has been provided by the Cassioli Group. For this system, the installed power is 55.5 kW, that is the sum of the power required for the lifting phase and the one required for the translation phase. Considering the same horizontal time that has been used for the simulation and an average power of a CBAS/RS of 10 kW, the total energy consumed using the traditional AS/RS is about 155 kJ. This energy can be compared to the 63 kJ of deep-lane AVS/RS, obtained as the difference between the total energy consumed and the total energy recovered. In this way it is possible to see that the use of a deep-lane AVS/RS instead of a traditional CBAS/RS can provide a saving of about 60% of energy consumption.
7. Conclusions and Future Works
The findings of this work contribute to the field of warehouse sustainability by providing an energy evaluation of a deep-lane AVS/RS equipped with an energy recovery system that exploits the breaking phase of both the lifts. In order to achieve the objective of evaluating the energy consumption and recovery of such a system, an appropriate simulator has been constructed and validated on a real-case study. In particular, this research shows that about 28% of the energy consumption can be recovered with a deep-lane AVS/RS, and that such a system roughly represents 40% of the energy consumption of a traditional CBAS/RS.
The results of this work also have some managerial and practical implications. First, the simulator can be used as a framework to evaluate the impact of different storage and retrieval algorithms on energy consumption and recovery, so it can be useful for both designers and marketing operators to provide a potential customer with quantitative measures for energy consumption and recovery of the deep-lane AVS/RS. Moreover, it can be used as an easy and flexible tool to briefly estimate energy consumption and energy recovery of other deep-lane AVS/RSs or of an already existing system in different scenarios.
Future works can exploit this study to make an energy evaluation that considers the concurrent usage of shuttles with an additional RBS for the shuttle. Moreover, this study can be extended by also considering dual-command cycles. Finally, we suggest the use of a sensibility analyses to provide a more detailed insight on performance evaluation of AVS/RS.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}



