Coordinated Control Model of Main-Signal and Pre-Signal for Intersections with Dynamic Waiting Lanes

Abstract
:1. Introduction
- (1)
- The object of discussion is the traditional crossroad, which adopts the traditional four-phase traffic signal control method;
- (2)
- The impact of right-turn traffic is not considered in this paper;
- (3)
- The drivers follow the driving rules of the dynamic waiting lane;
- (4)
- The vehicles arrive at and leave the intersection evenly according to the linear law.
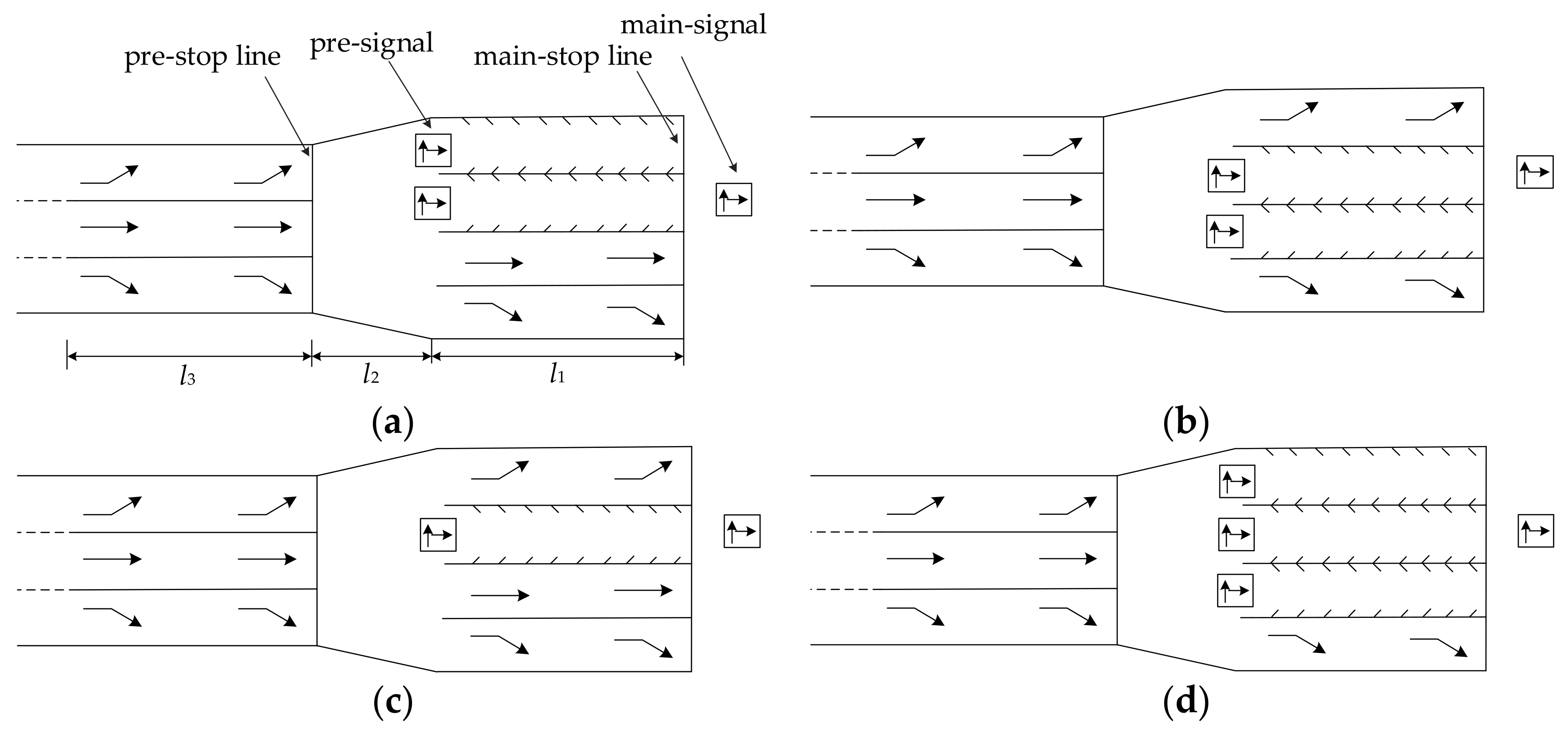
2. Coordinated Control Method Analysis of the Main-Signal and Pre-Signal
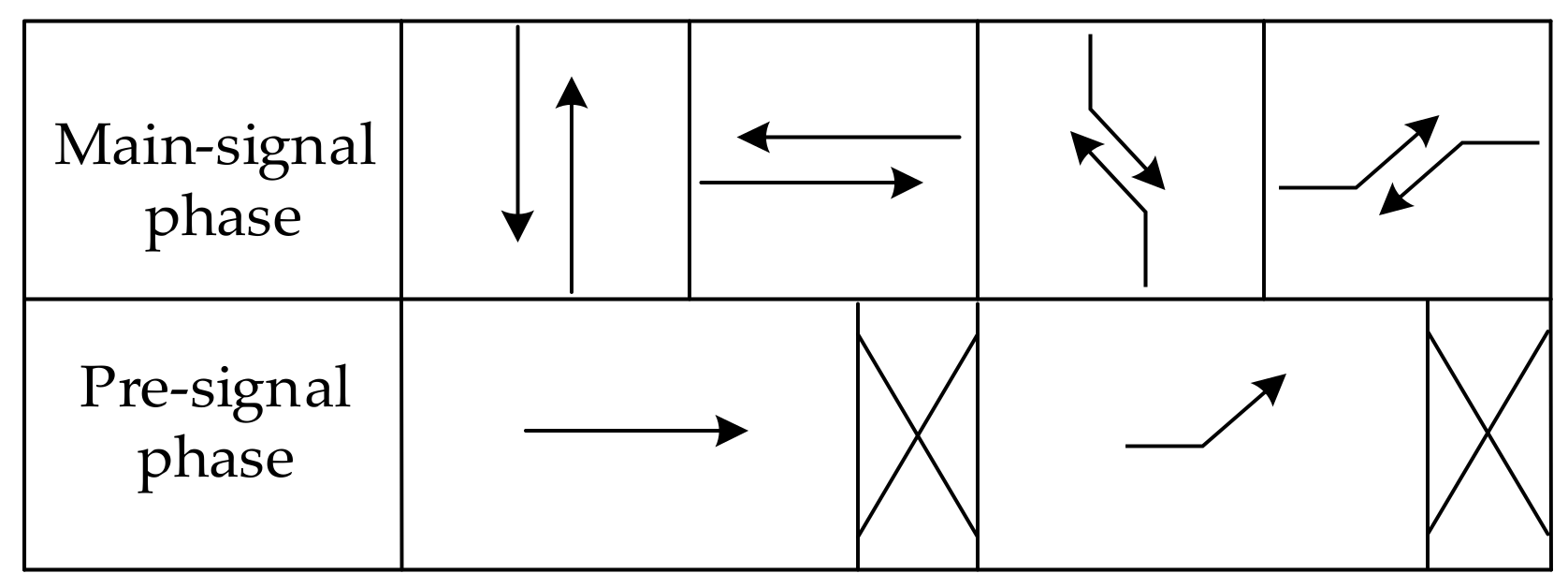
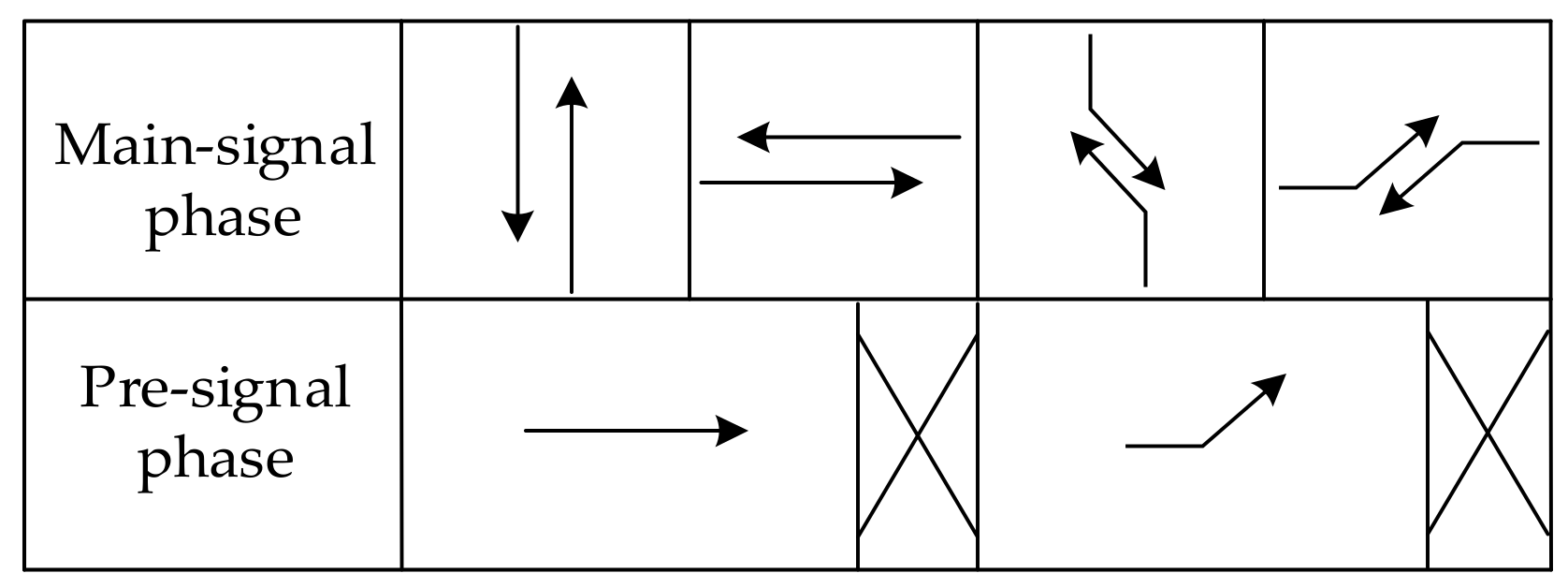
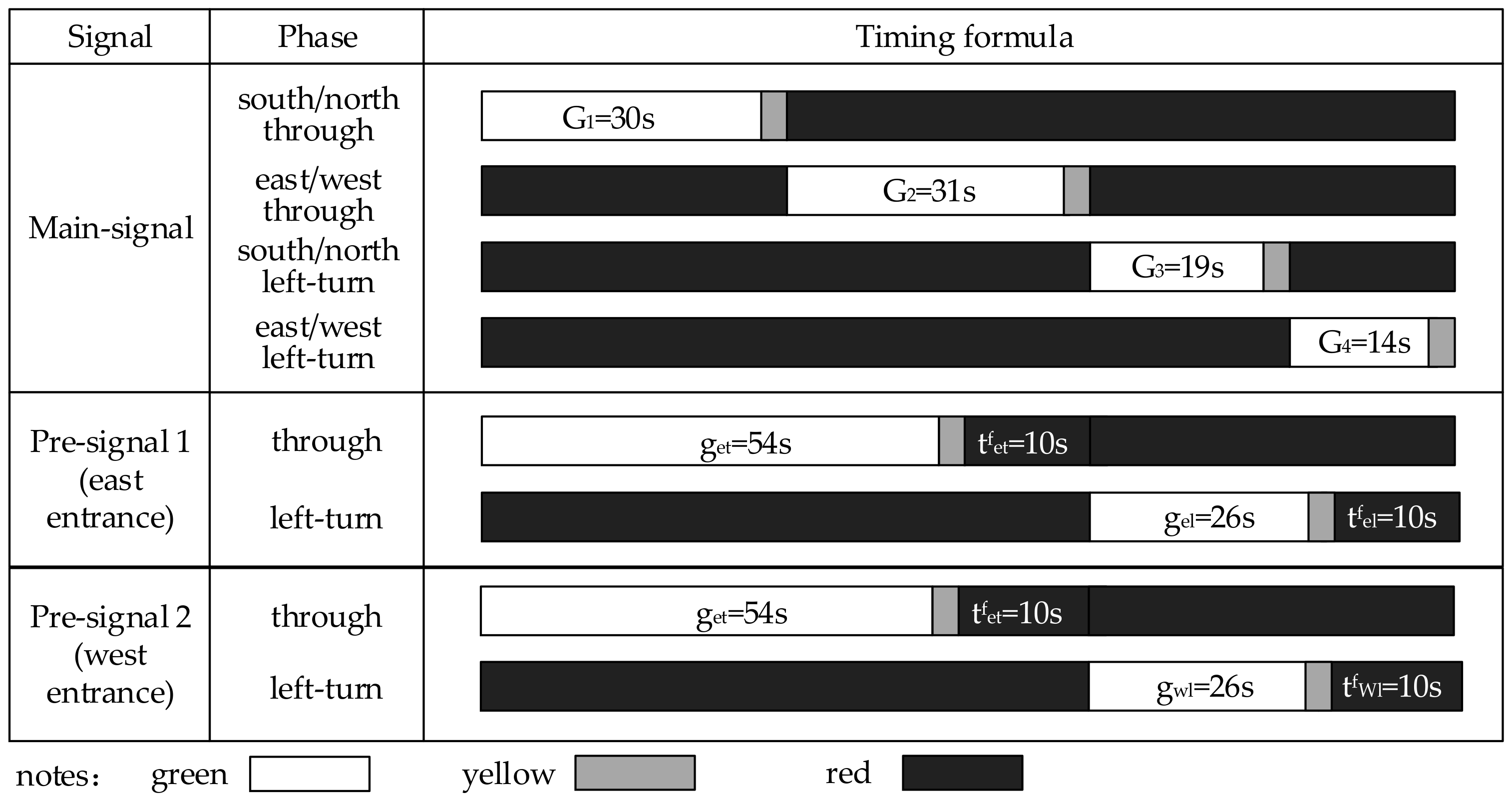
2.1. Coordination of Phase Sequence between the Main-Signal and Pre-Signal
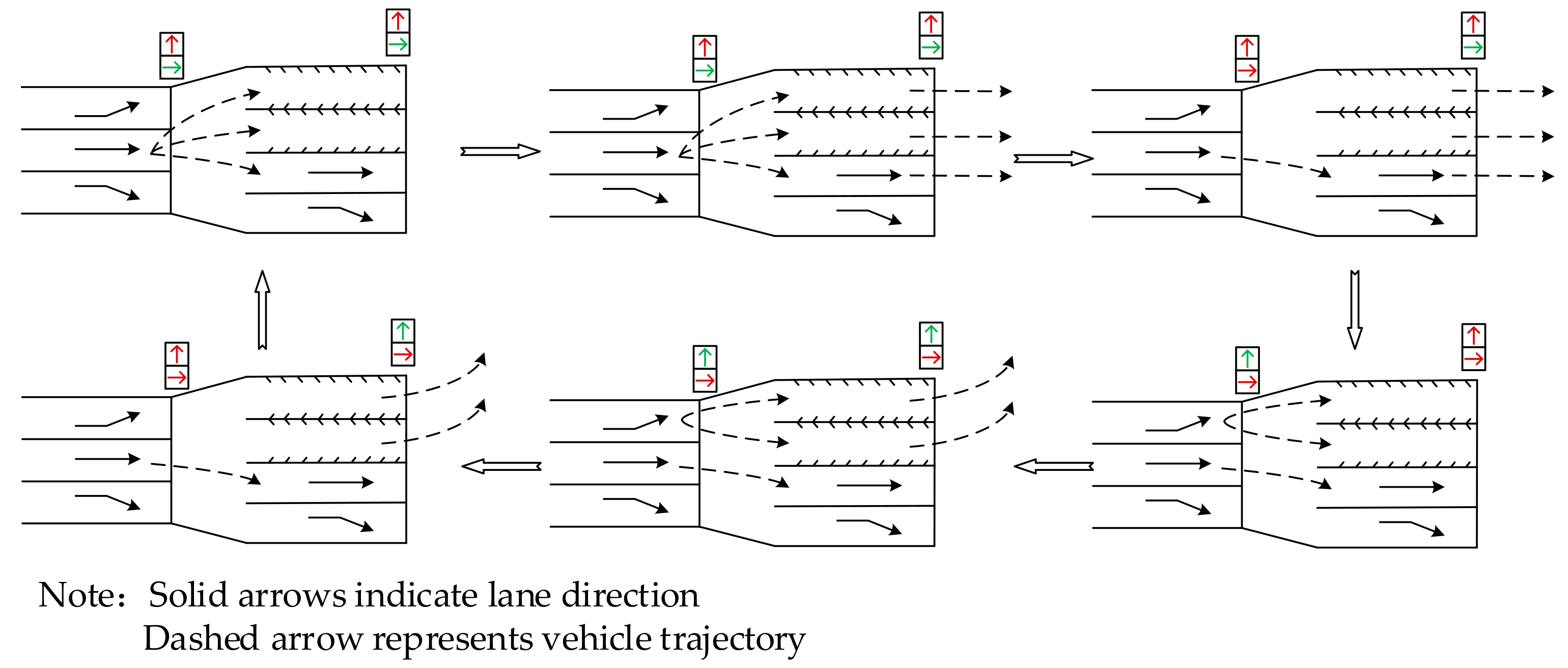
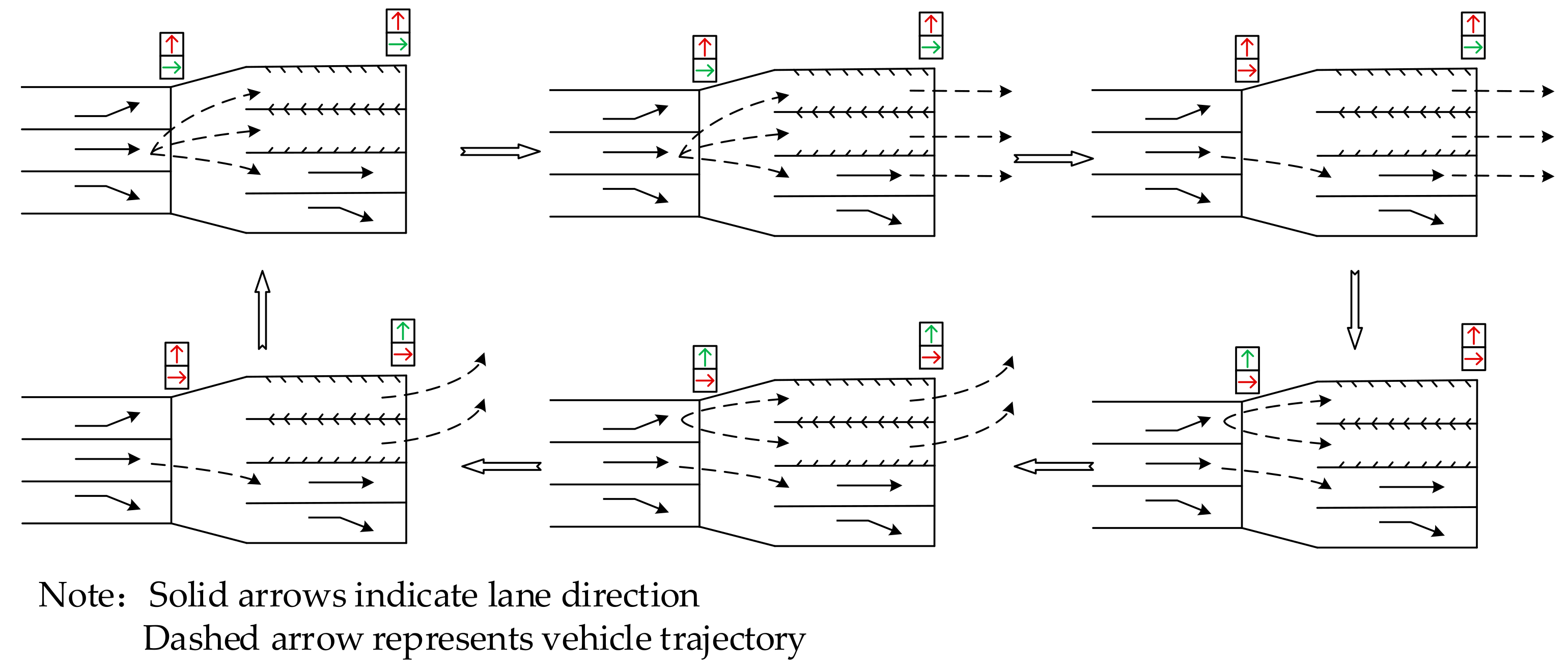
2.2. Coordinated Control Process of the Main-Signal and Pre-Signal
3. Coordinated Control Model of the Main-Signal and Pre-Signal
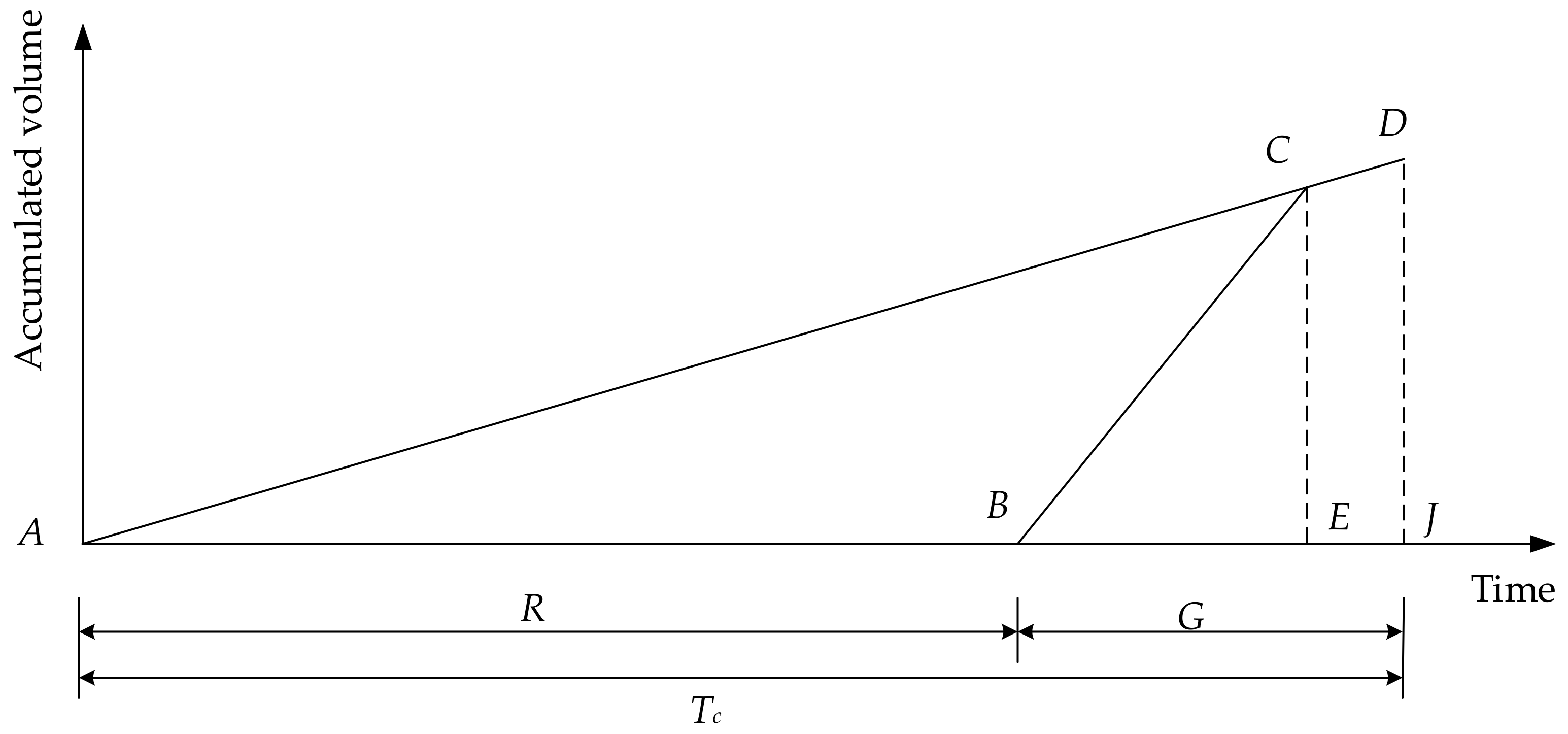
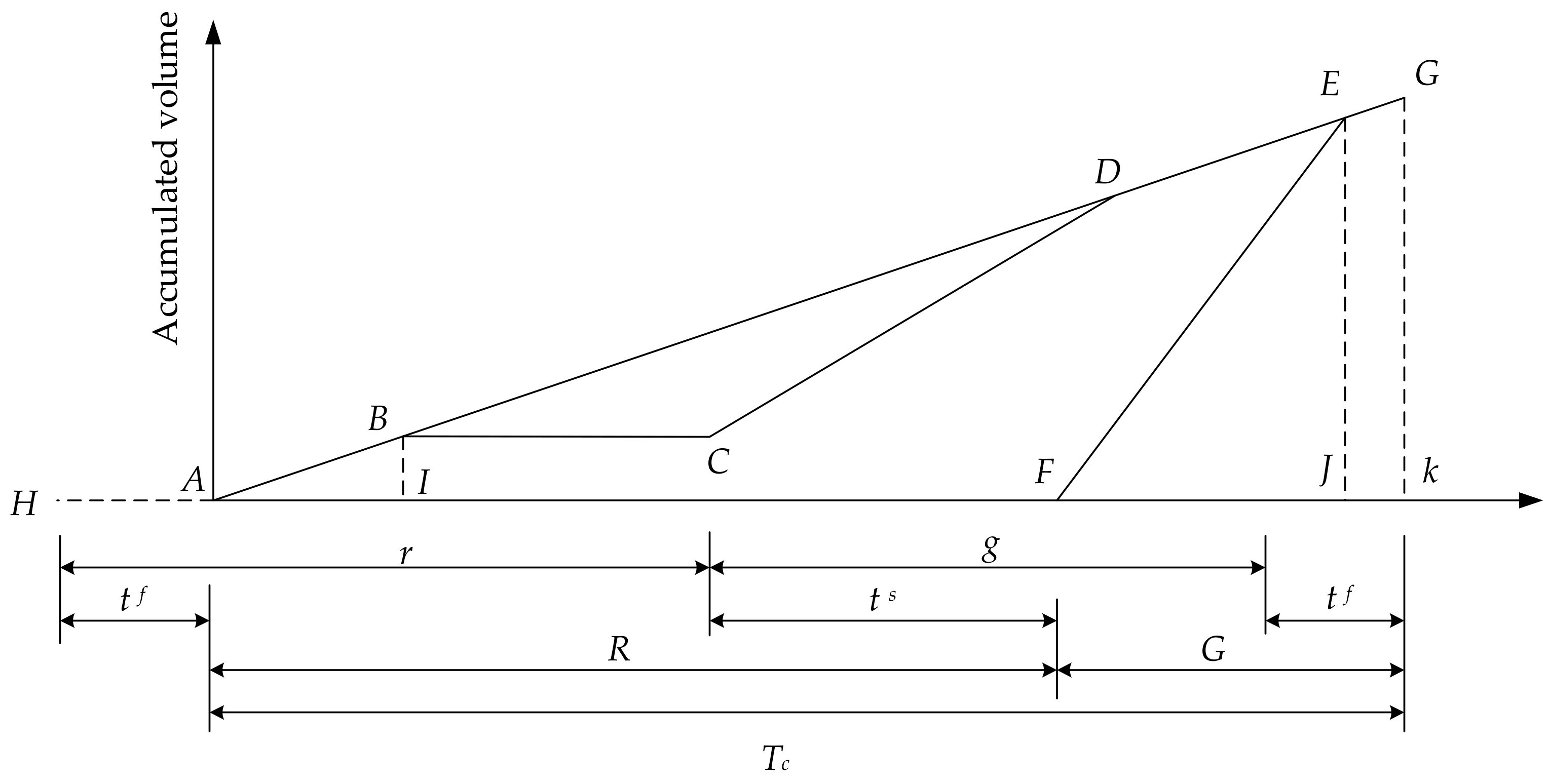
3.1. Vehicle Delay Analysis
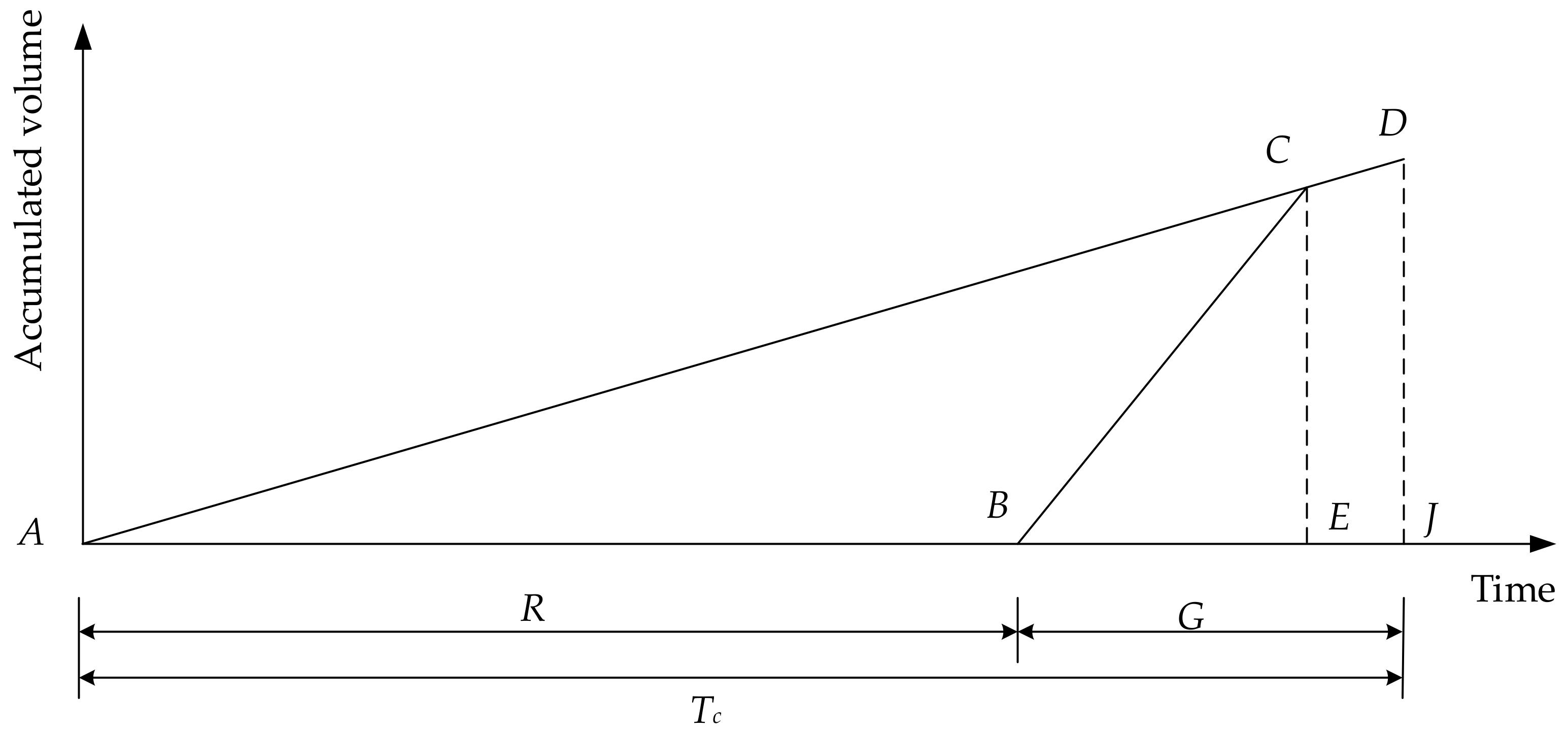
3.1.1. Vehicle Delay Analysis in a Traditional Intersection Entrance (without Pre-Signal)
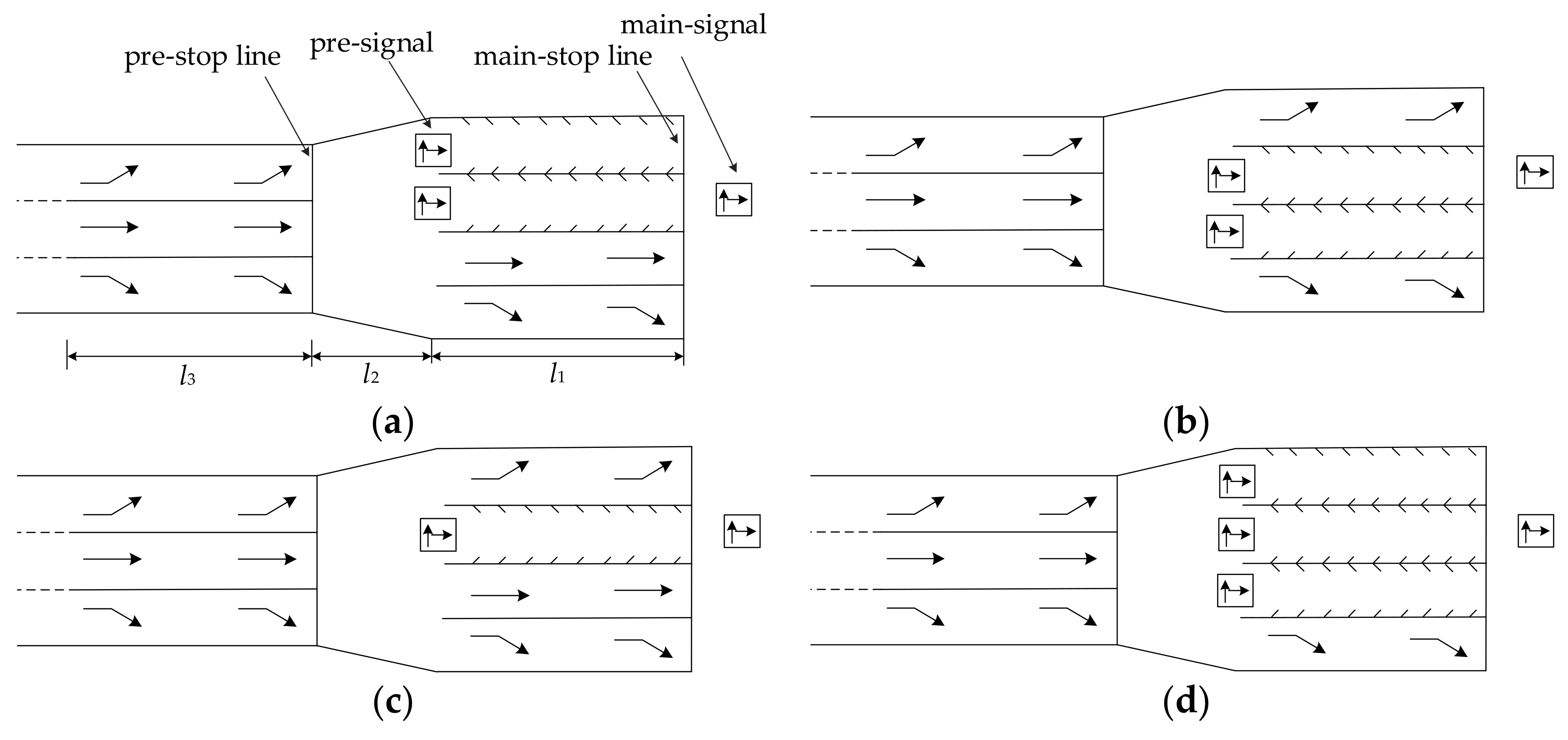
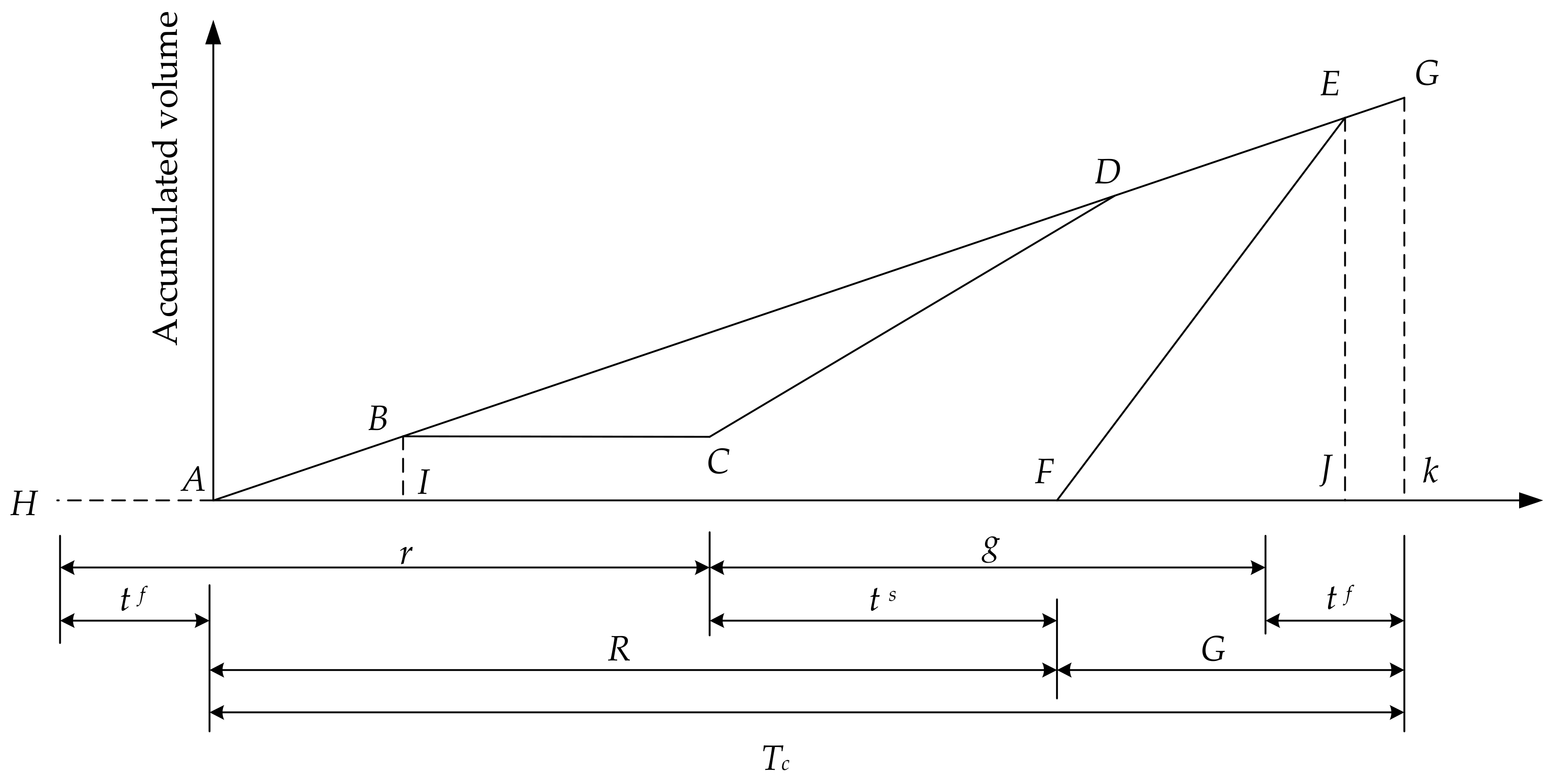
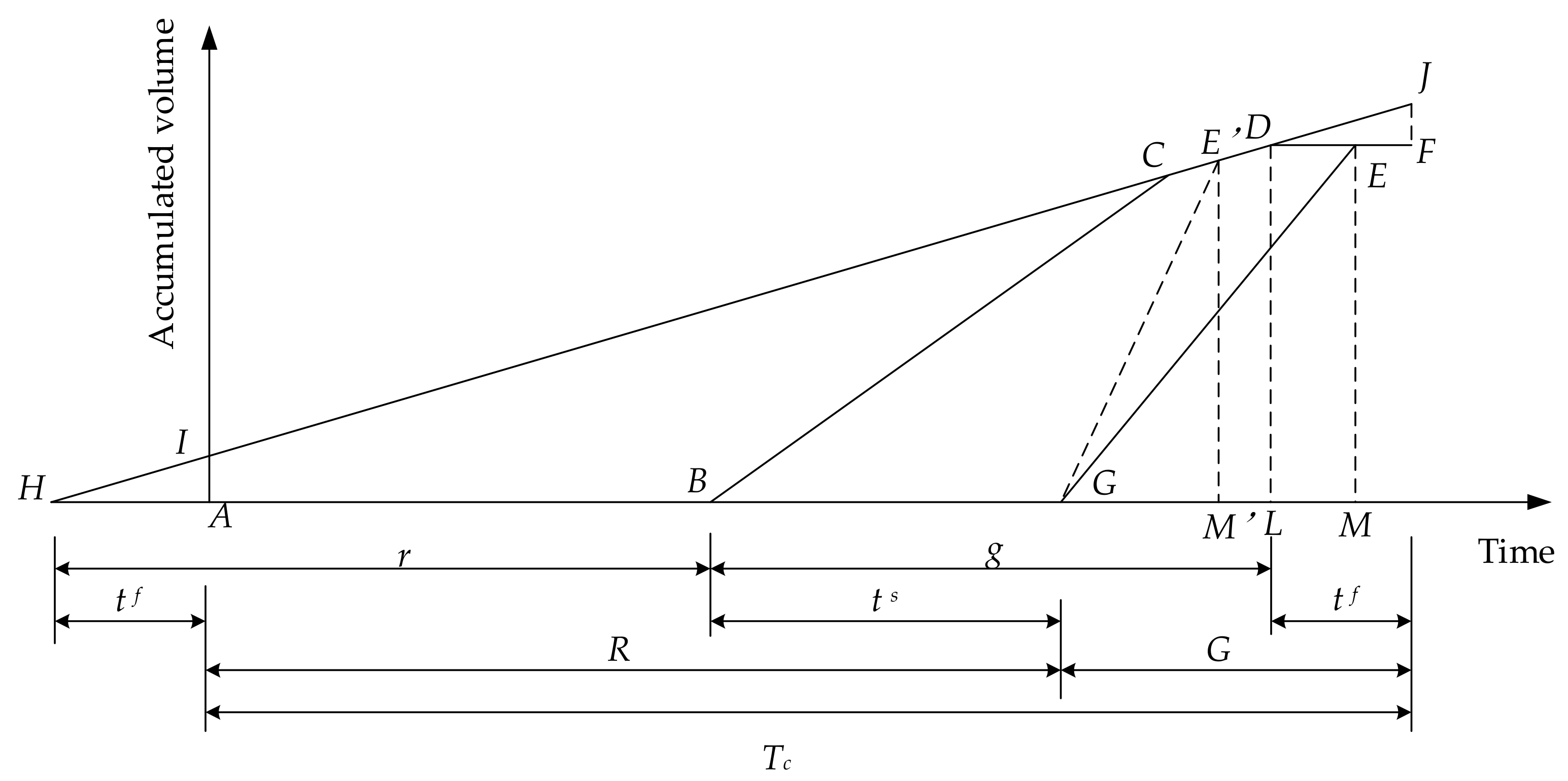
3.1.2. Vehicle Delay at an Intersection Entrance with Pre-Signal Analysis
- (1)
- With exclusive lanes in the main-signal area
- (2)
- Without exclusive lanes in the main-signal area
- (1)
- Condition 1: The queue of the main-signal has not dissipated at the end of the pre-signal green light.
- (2)
- Condition 2: the queue at the main signal has dissipated at the end of the pre-signal green light.
3.1.3. Average Delay at the Intersection
3.2. Analysis of the Interrelations of Timing Parameters between the Main-Signal and Pre-Signal
3.2.1. The Signal Cycle
3.2.2. The Minimum Green Time
3.2.3. The Maximum Saturation
3.2.4. Early Finishing Time of the Green Phase of the Pre-Signal
3.2.5. Early Starting Time of the Green Phase of the Pre-Signal
3.2.6. The Capacity
3.3. Coordinated Control Model of the Main-Signal and Pre-Signal
4. Case Study
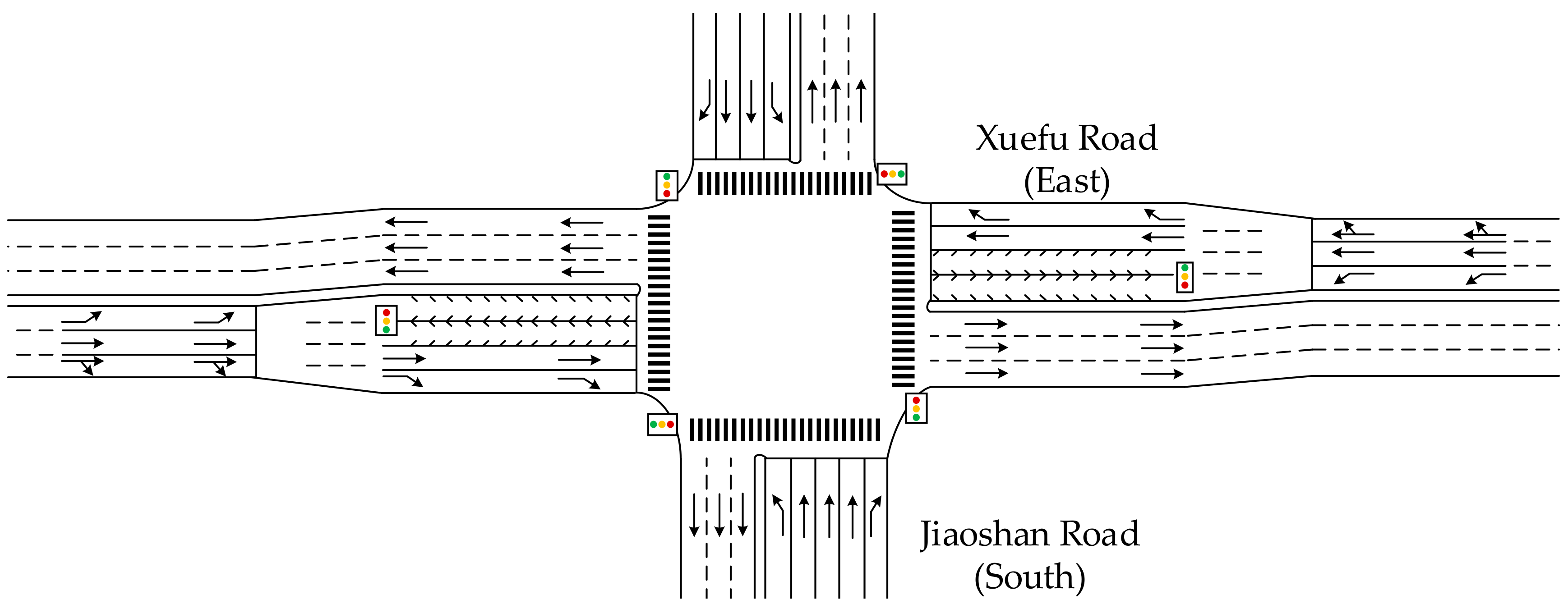
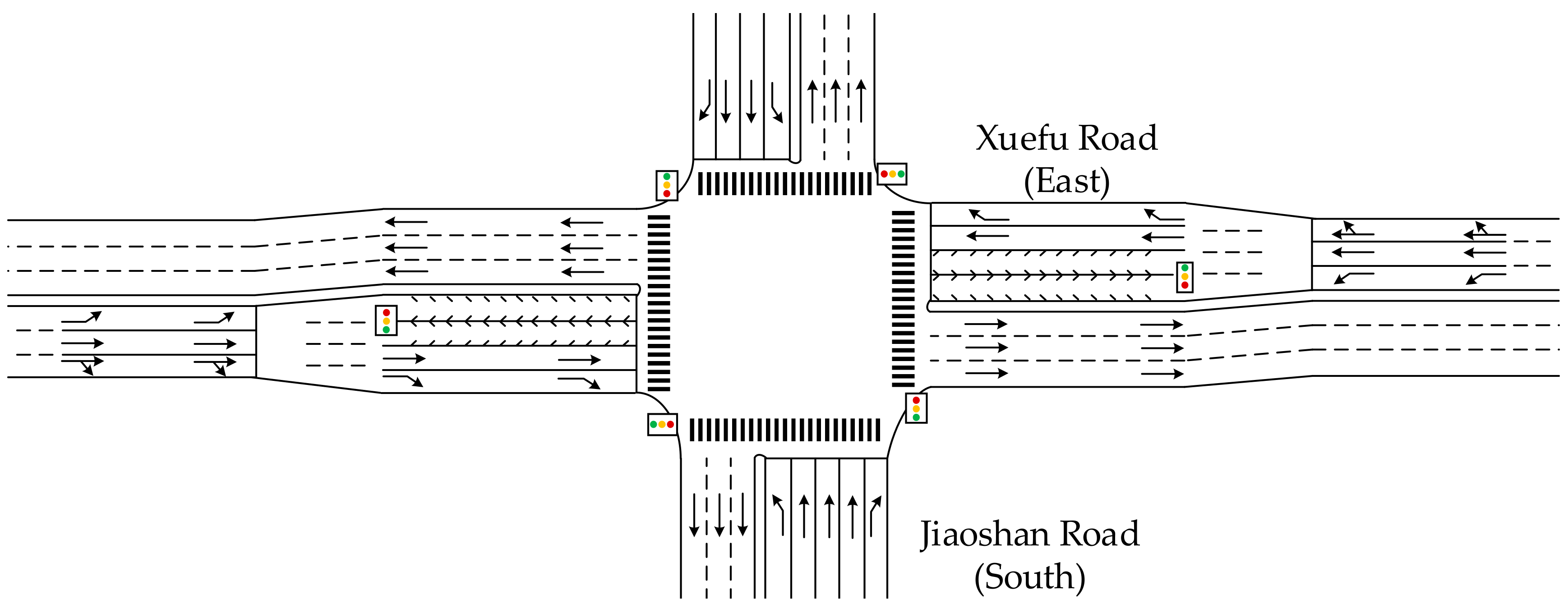
4.1. Example Intersection
4.2. The Application of the Proposed Model
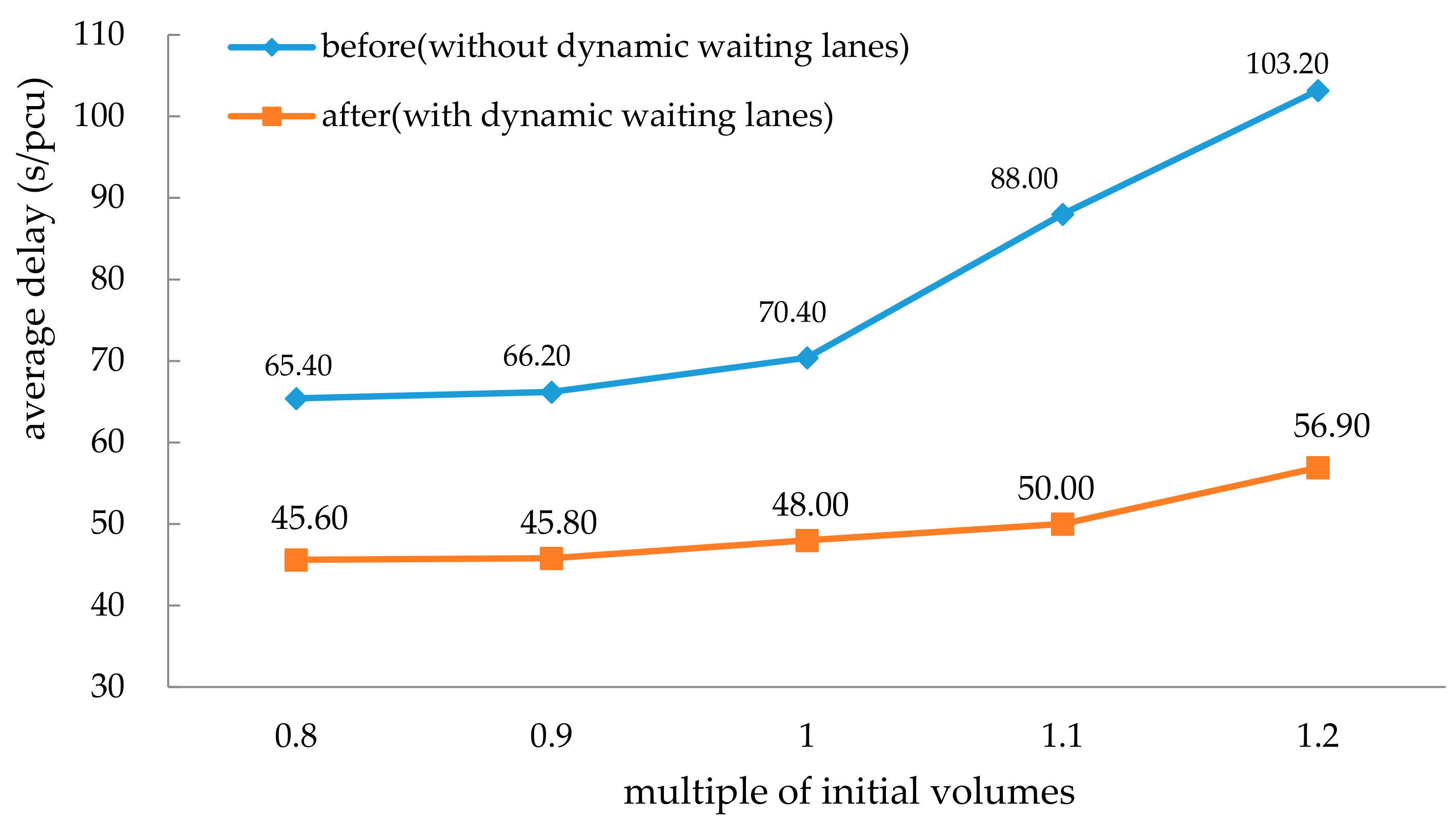
4.3. Average Delay Analysis
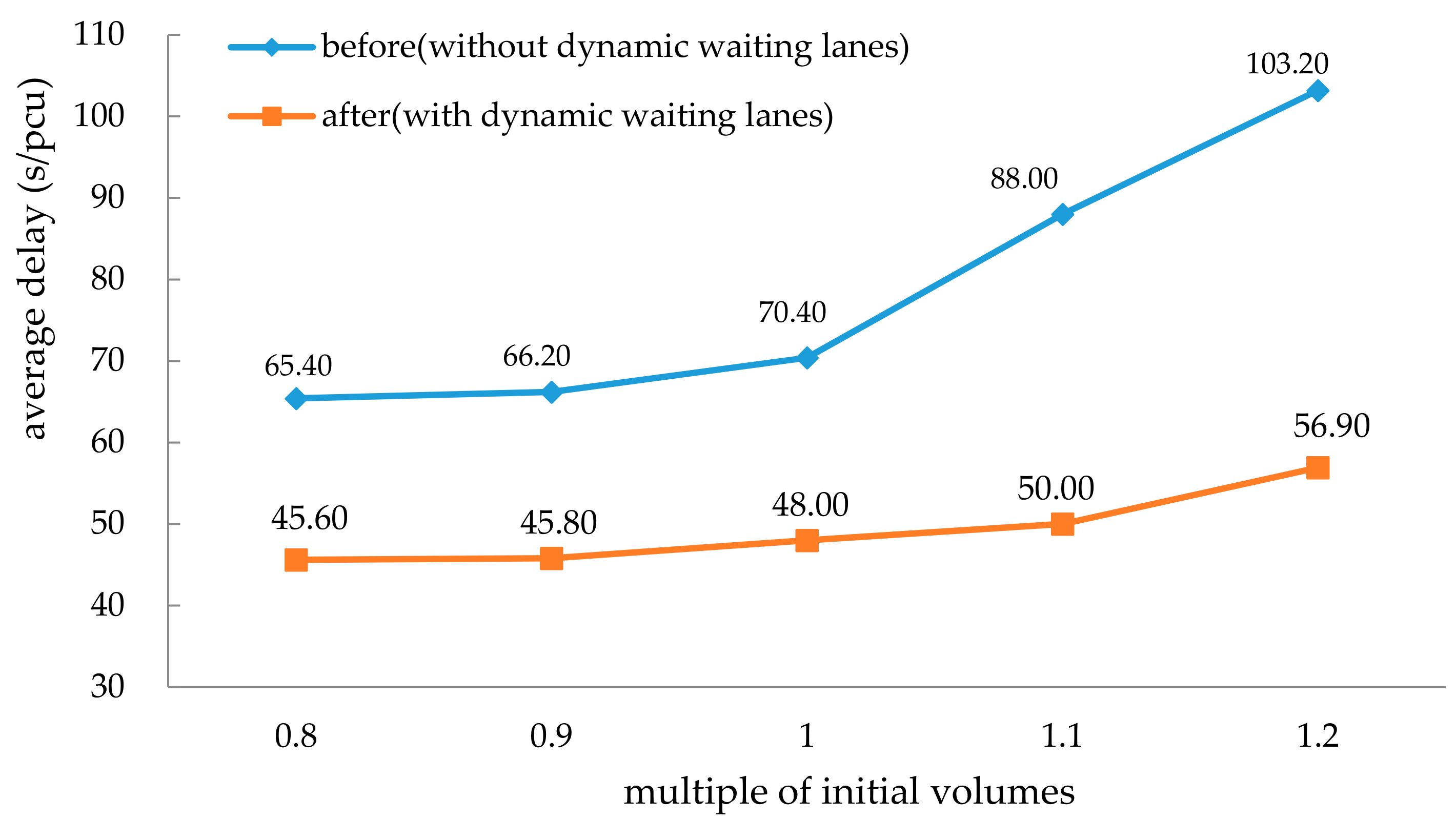
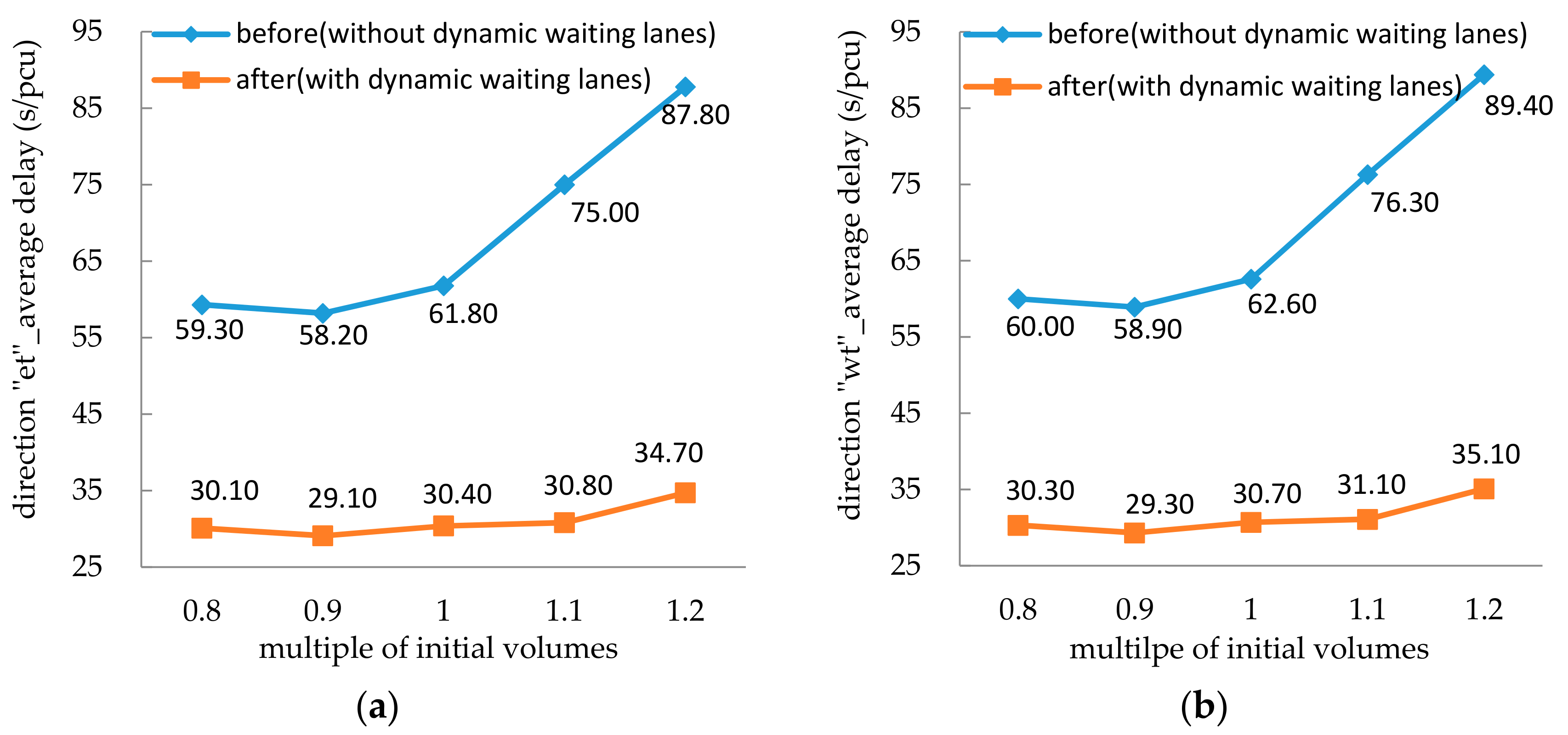
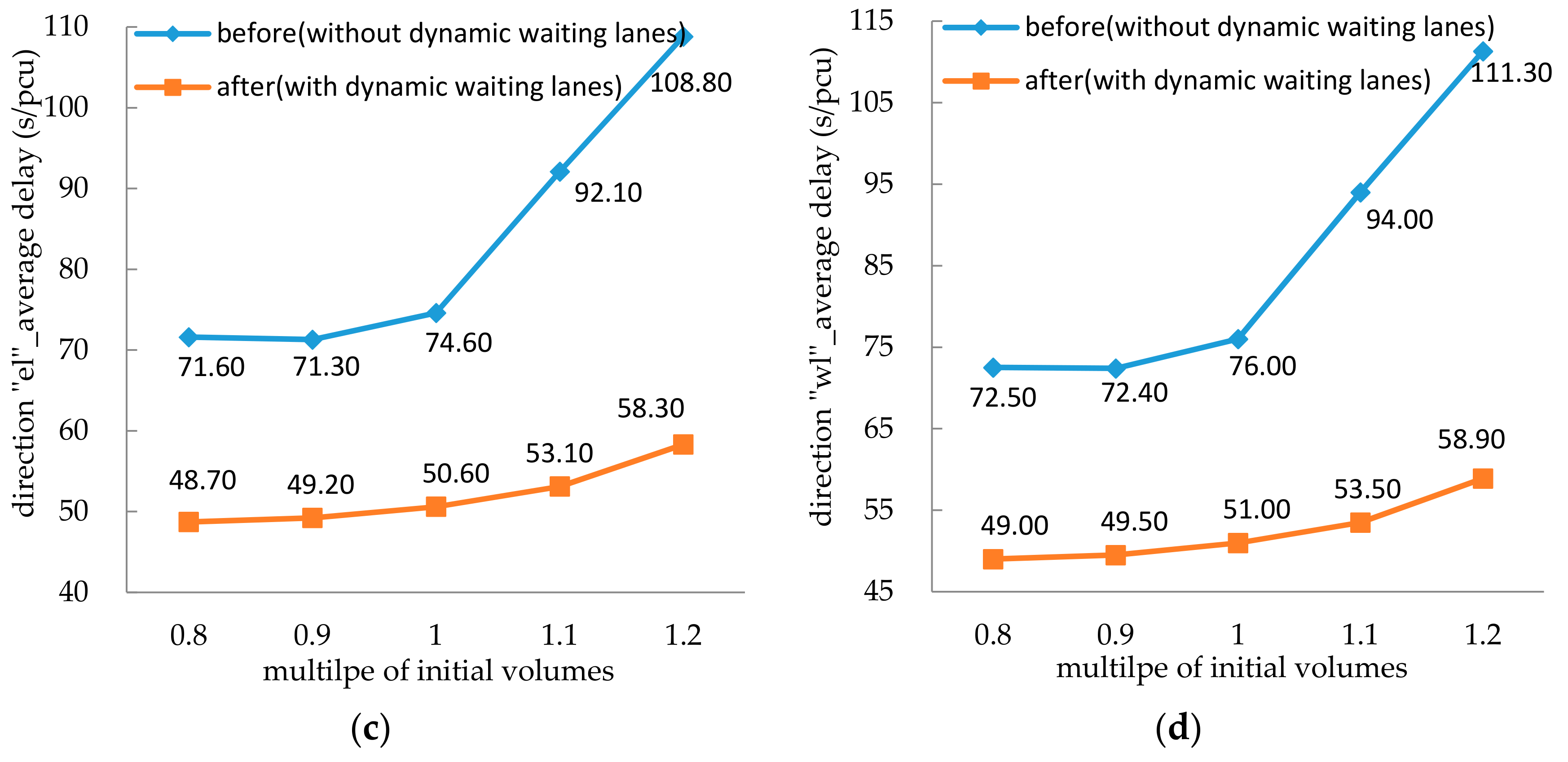
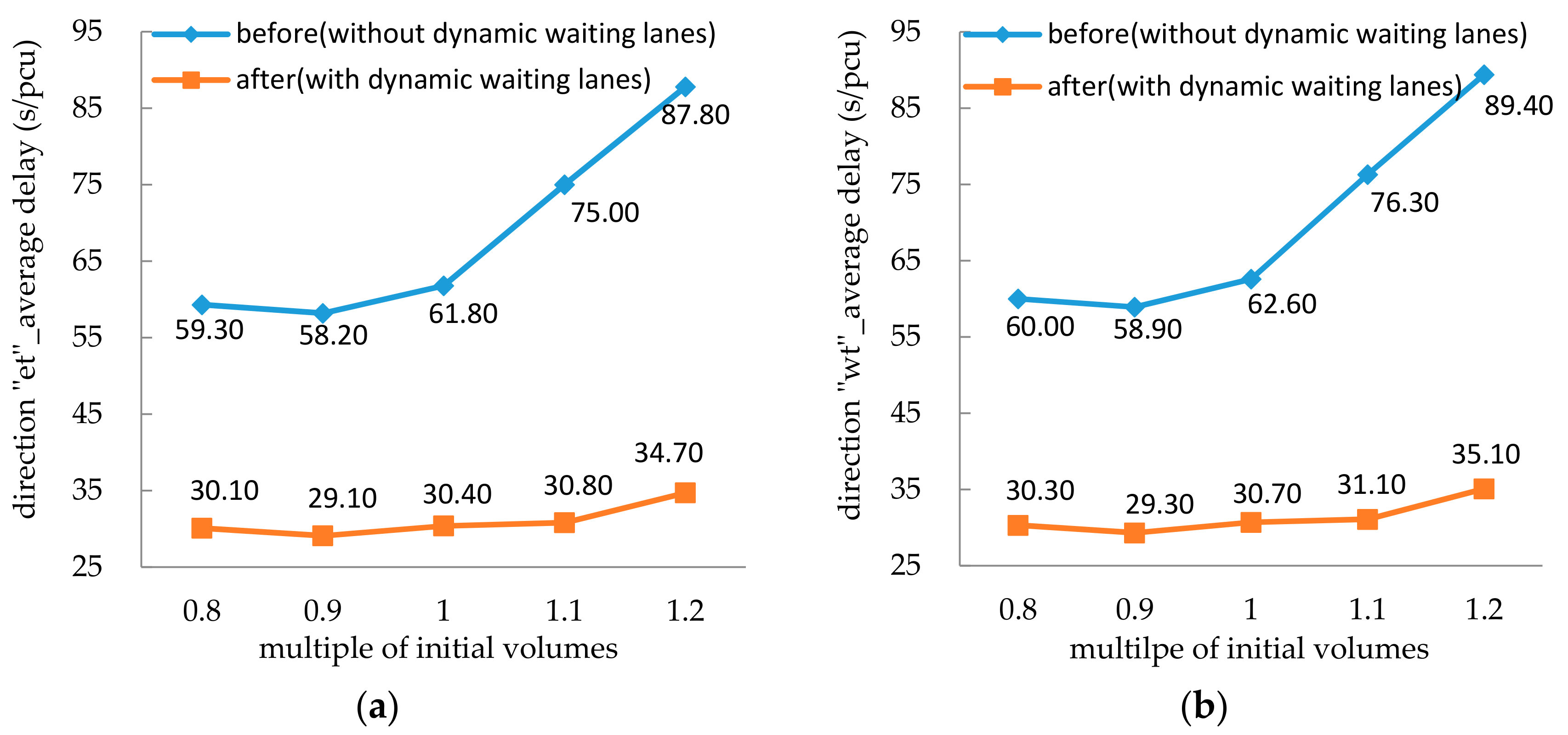
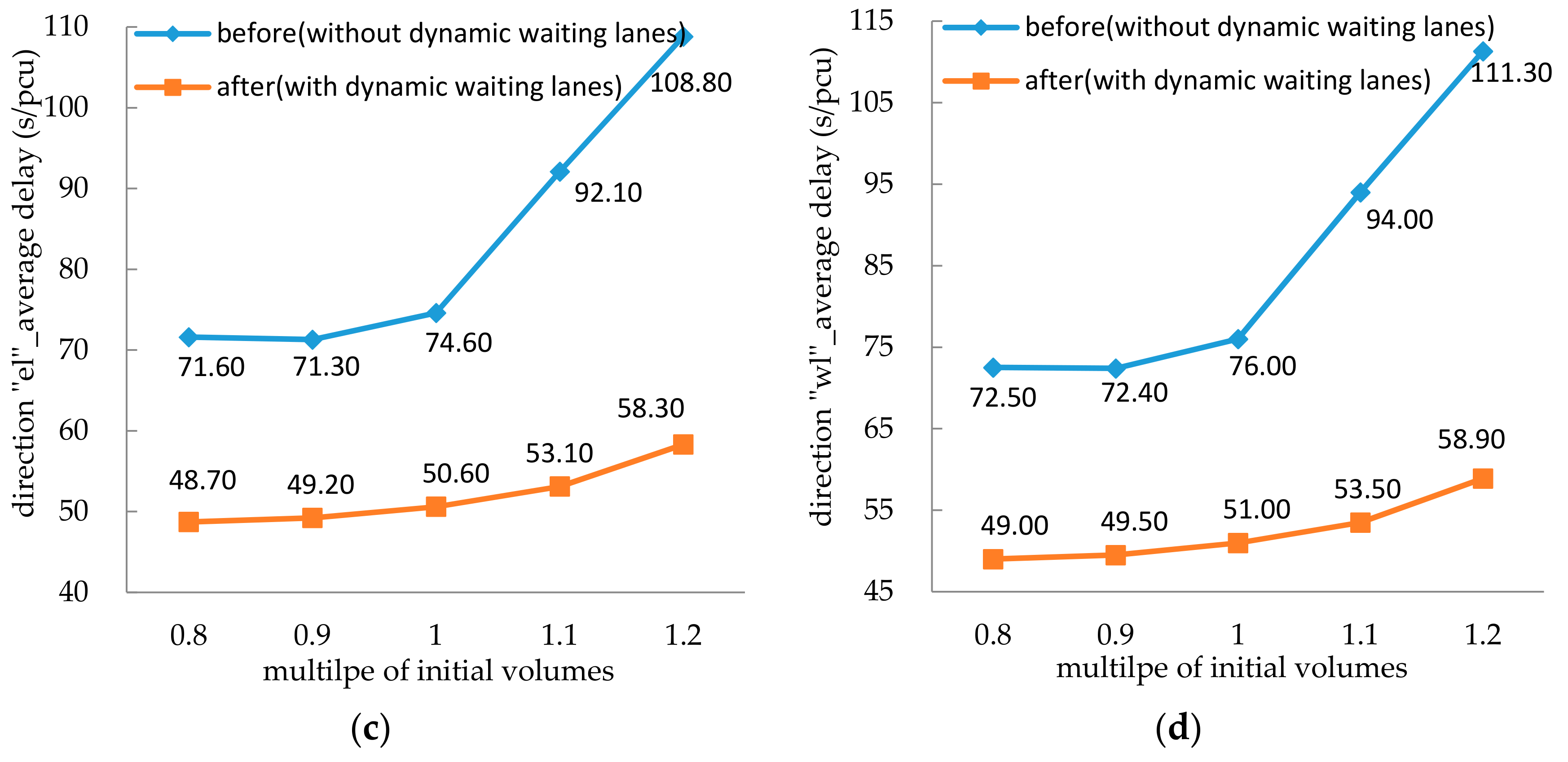
4.4. Average Delay Analysis with Different Traffic Volumes
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| the total delay of all arriving vehicles during a cycle, s | |
| the total delay of all arriving vehicles at the pre-signal during a cycle, s | |
| the total delay of all arriving vehicles at the main-signal during a cycle, s | |
| the area of a polygon which indicates time in this paper, s | |
| the number of accumulated vehicles between the start of the green light of the main-signal and the dissipation of the queue | |
| the accumulated time from the end of the green light of the pre-signal to the dissipation of the queue of the main-signal, s | |
| the length of the signal cycle, s | |
| the red time of the main-signal, s | |
| the green time of the main-signal, s | |
| the red time of the pre-signal, s | |
| the green time of the pre-signal, s | |
| the yellow time, s | |
| the number of signal phases | |
| the early start time of the green phase of the pre-signal, s | |
| the early finish time of the green phase of the pre-signal, s | |
| the number of exclusive lanes in the main-signal area | |
| the number of dynamic waiting lanes in the main-signal area | |
| the mean speed of the last car from the pre-stop line to the main-stop line, m/s | |
| the saturated time headway, s/pcu | |
| the space headway in the queue, m/pcu | |
| the volume per hour, pcu/h | |
| the capacity of the main-signal per cycle, pcu/Tc | |
| the capacity of the pre-signal per cycle, pcu/Tc | |
| the storing capacity of the exclusive lanes in the main-signal area | |
| PCU | Passenger Car Unit |
References
- Zhou, Z.H.; Cai, M. Intersection signal control multi-objective optimization based on genetic algorithm. J. Traffic Transp. Eng. (Engl. Ed.) 2014, 1, 153–158. [Google Scholar] [CrossRef]
- Wei, Y.; Shao, Q.; Han, Y.; Fan, B.Q. Intersection Signal Control Approach Based on PSO and Simulation. In Proceedings of the 2008 Second International Conference on Genetic & Evolutionary Computing, Hubei, China, 25–26 September 2008; IEEE Computer Society: Washington, DC, USA, 2008; pp. 277–280. [Google Scholar]
- Wong, C.K.; Wong, S.C. Lane-based optimization of signal timings for isolated junctions. Transp. Res. Part B 2003, 37, 63–84. [Google Scholar] [CrossRef]
- Zhao, J.; Fu, J.Y.; Yang, X.G. Optimization Model of Dynamic Lane Assignment for Isolated Signalized Intersections. J. Tongji Univ. (Nat. Sci.) 2013, 41, 996–1001. [Google Scholar] [CrossRef]
- Li, L.L.; Qu, Z.W.; Song, M.M.; Wang, D.H. Control strategy of variable lane. J. Jilin Univ. (Eng. Technol. Ed.) 2009, 39, 98–103. [Google Scholar]
- Li, L.L.; Qu, Z.W.; Chen, Y.H.; Wang, D.H. Research on Variable Lane Signalized Control Method. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; pp. 575–578. [Google Scholar]
- Xia, X.; He, Z.C.; Sun, W.B.; Chen, Z.Q.; Gong, J.F. Traffic impact analysis of urban intersections with comprehensive waiting area on urban intersection based on PARAMICS. Procedia Soc. Behav. Sci. 2013, 96, 1910–1920. [Google Scholar] [CrossRef]
- Wu, J.; Hounsell, N. Bus Priority Using pre-signals. Transp. Res. Part A Policy Pract. 1998, 32, 563–583. [Google Scholar] [CrossRef]
- Xuan, Y.G.; Daganzo, C.F.; Cassidy, M.J. Increasing the capacity of signalized intersections with separate left turn phases. Transp. Res. Part B 2011, 45, 769–781. [Google Scholar] [CrossRef] [Green Version]
- Xuan, Y.G.; Cassidy, M.J.; Daganzo, C.F. Using a pre-signal to increase bus-and car-carrying capacity at intersections: Theory and experiment. Transp. Res. Rec. J. Transp. Res. Board 2012, 24, 191–196. [Google Scholar] [CrossRef]
- Zhou, Y.P.; Zhuang, H. The optimization of lane assignment and signal timing at the tandem intersection with pre-signal. J. Adv. Transp. 2014, 48, 362–376. [Google Scholar] [CrossRef]
- Yan, C.W.; Jiang, H.; Xie, S.Y. Capacity optimization of an isolated intersection under the phase swap sorting strategy. Transp. Res. Part B 2014, 60, 85–106. [Google Scholar] [CrossRef]
- Ma, W.J.; Xie, H.Z.; Liu, Y.; Luo, Z.K. Coordinated optimization of signal timings for intersection approach with presignals. Transp. Res. Rec. J. Transp. Res. Board 2013, 2355, 93–104. [Google Scholar] [CrossRef]
- Ma, W.J.; Xie, H.Z. Integrated control of main-signal and pre-signal on approach of intersection with double stop line. J. Jilin Univ. (Eng. Ed.) 2013, 43, 633–639. [Google Scholar]
- Li, L.L.; Qu, Z.W.; Wang, D.H. Guidance Method of the Variable Lane. Traffic Inf. Secur. 2008, 26, 53–56. [Google Scholar]
- Dongjing, C.; Linbo, L.; Rui, Z.; Bing, W. Coordinate relationship between main signals and pre-signals of the variable lane at signalized intersection. J. Chongqing Jiaotong Univ. (Nat. Sci. Ed.) 2013, 32, 252–257. [Google Scholar]
- Zhang, W.H.; Lu, H.P. Analysis of vehicle delay of intersections with pre-signals based on bus priority. China J. Highw. Transp. 2005, 18, 78–82. [Google Scholar]
- Yin, H.B.; Xu, J.M.; Zhou, Q.J. A knowledge based system for the design of signalized intersections. J. South China Univ. Technol. (Nat. Sci.) 1999, 27, 112–115. [Google Scholar]
- Department of the People’s Republic of China Ministry of Housing and Urban-Rural Development. National Standards of People’s Republic of China GB 50647-2011: Urban Road Intersection Planning Specification; China Planning Press: Beijing, China, 2011.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entrance | Number of Entrance Lanes | Number of Exit Lanes |
|---|---|---|
| south | 5 | 3 |
| north | 4 | 3 |
| east | 4 | 3 |
| west | 4 | 3 |
| Direction | South | North | East | West |
|---|---|---|---|---|
| right-turn | 134 | 92 | 134 | 102 |
| through | 984 | 569 | 994 | 1025 |
| left-turn | 212 | 222 | 306 | 330 |
| Gst/nt/s | Gsl/nl/s | Get/wt/s | Gel/wl/s | Tc/s |
|---|---|---|---|---|
| 25 | 38 | 17 | 25 | 105 |
| Entrance | l1/m | l2/m | l3/m |
|---|---|---|---|
| east | 50 | 25 | 50 |
| west | 50 | 25 | 50 |
| Delay | South | North | East | West | ||||
|---|---|---|---|---|---|---|---|---|
| Through | Left-Turn | Through | Left-Turn | Through | Left-Turn | Through | Left-Turn | |
| before (s/pcu) | 60.7 | 70.1 | 51.4 | 75.0 | 45.2 | 55.3 | 47.6 | 61.28 |
| after (s/pcu) | 38.8 | 47.3 | 36.0 | 48.5 | 37.4 | 51.8 | 38.2 | 53.94 |
| reduction rate | 36.0% | 32.6% | 30.0% | 35.3% | 17.1% | 6.3% | 19.7% | 12.0% |
| Multiple | South | North | East | West | ||||
|---|---|---|---|---|---|---|---|---|
| Through (pcu/h) | Left-Turn (pcu/h) | Through (pcu/h) | Left-Turn (pcu/h) | Through (pcu/h) | Left-Turn (pcu/h) | Through (pcu/h) | Left-Turn (pcu/h) | |
| 0.8 | 984 | 212 | 569 | 222 | 795 | 820 | 820 | 264 |
| 0.9 | 984 | 212 | 569 | 222 | 895 | 923 | 923 | 297 |
| 1 | 984 | 212 | 569 | 222 | 994 | 306 | 1025 | 330 |
| 1.1 | 984 | 212 | 569 | 222 | 1093 | 337 | 1128 | 363 |
| 1.2 | 984 | 212 | 569 | 222 | 1193 | 367 | 1230 | 396 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Chang, Y.; Zhang, P. Coordinated Control Model of Main-Signal and Pre-Signal for Intersections with Dynamic Waiting Lanes. Sustainability 2018, 10, 2849. https://doi.org/10.3390/su10082849
Zhao C, Chang Y, Zhang P. Coordinated Control Model of Main-Signal and Pre-Signal for Intersections with Dynamic Waiting Lanes. Sustainability. 2018; 10(8):2849. https://doi.org/10.3390/su10082849
Chicago/Turabian StyleZhao, Chen, Yulin Chang, and Peng Zhang. 2018. "Coordinated Control Model of Main-Signal and Pre-Signal for Intersections with Dynamic Waiting Lanes" Sustainability 10, no. 8: 2849. https://doi.org/10.3390/su10082849
APA StyleZhao, C., Chang, Y., & Zhang, P. (2018). Coordinated Control Model of Main-Signal and Pre-Signal for Intersections with Dynamic Waiting Lanes. Sustainability, 10(8), 2849. https://doi.org/10.3390/su10082849