Accuracy Improvement of Real-Time Location Tracking for Construction Workers


Abstract
1. Introduction
2. Literature Review
2.1. Location-Sensing Technologies
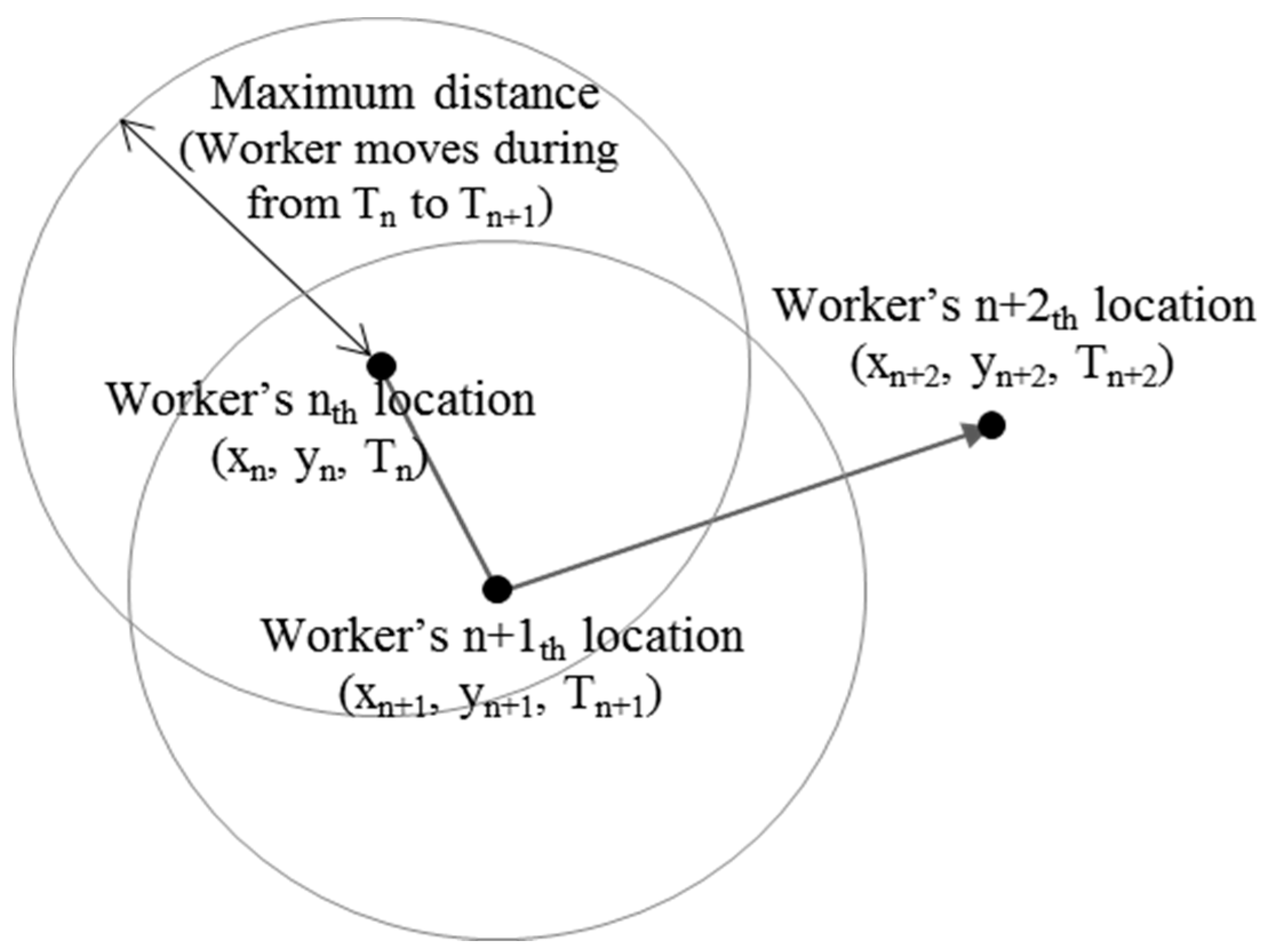
2.2. Movement Chacrateristics
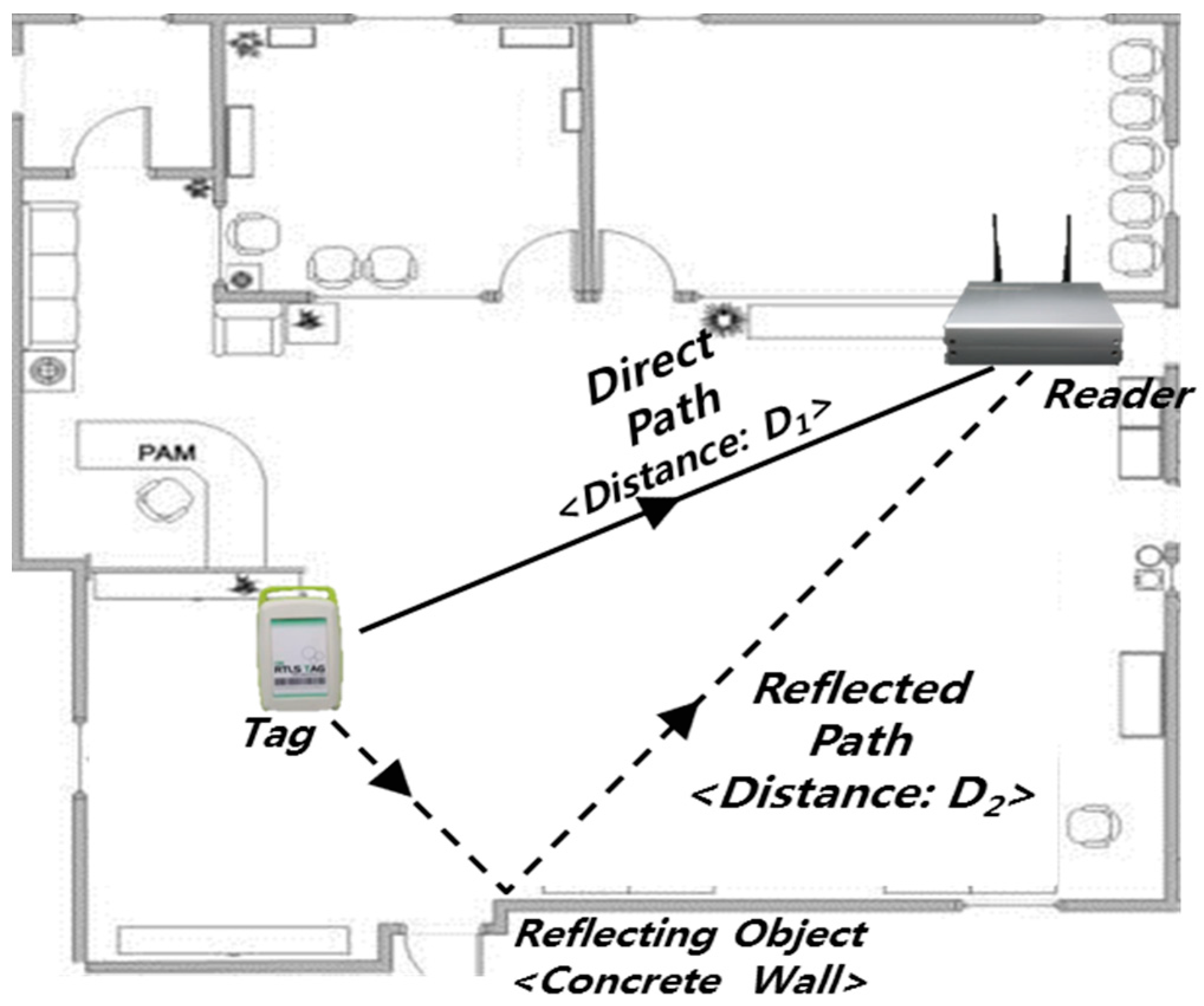
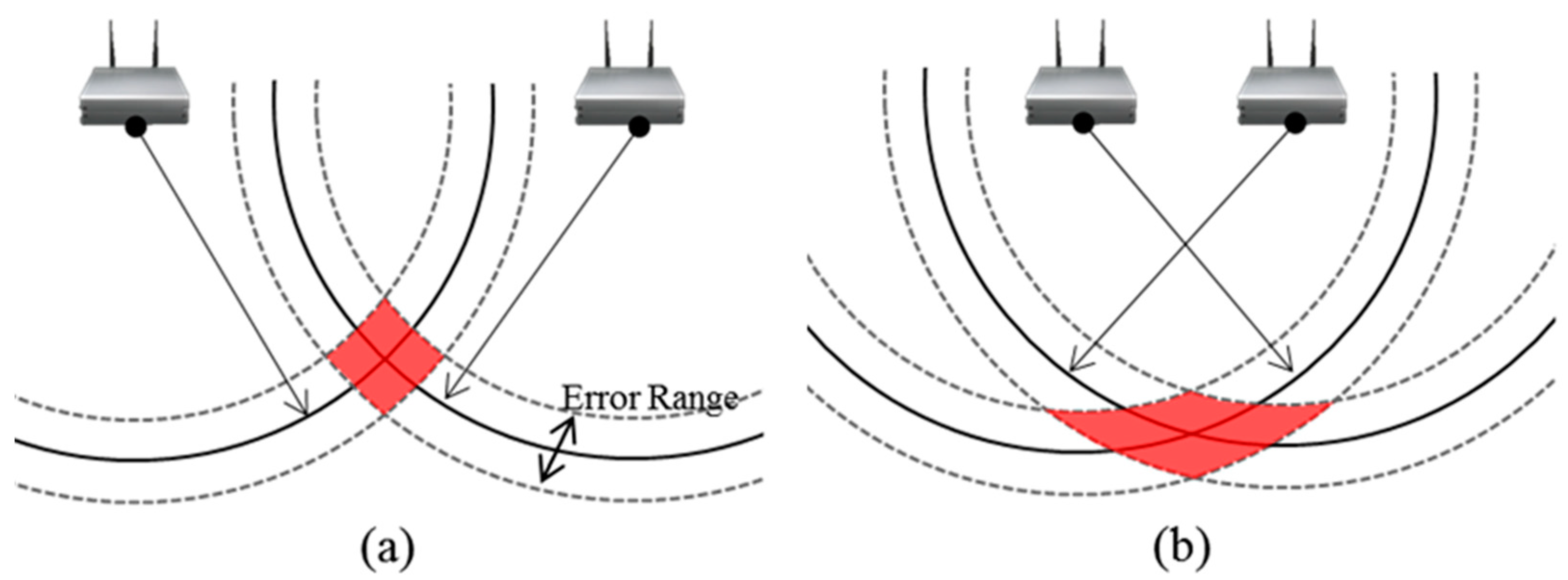
2.3. Location-Tracking Error Caused by Multi-Path and NLOS
3. Methodology
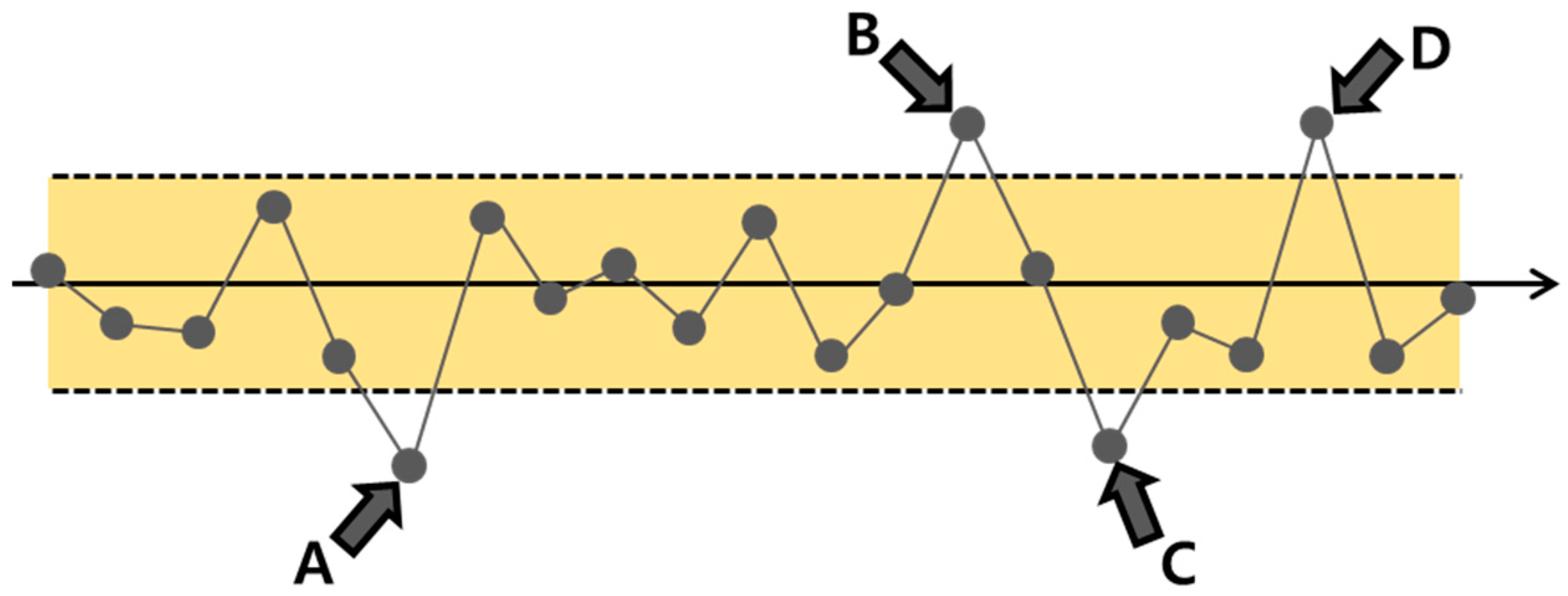
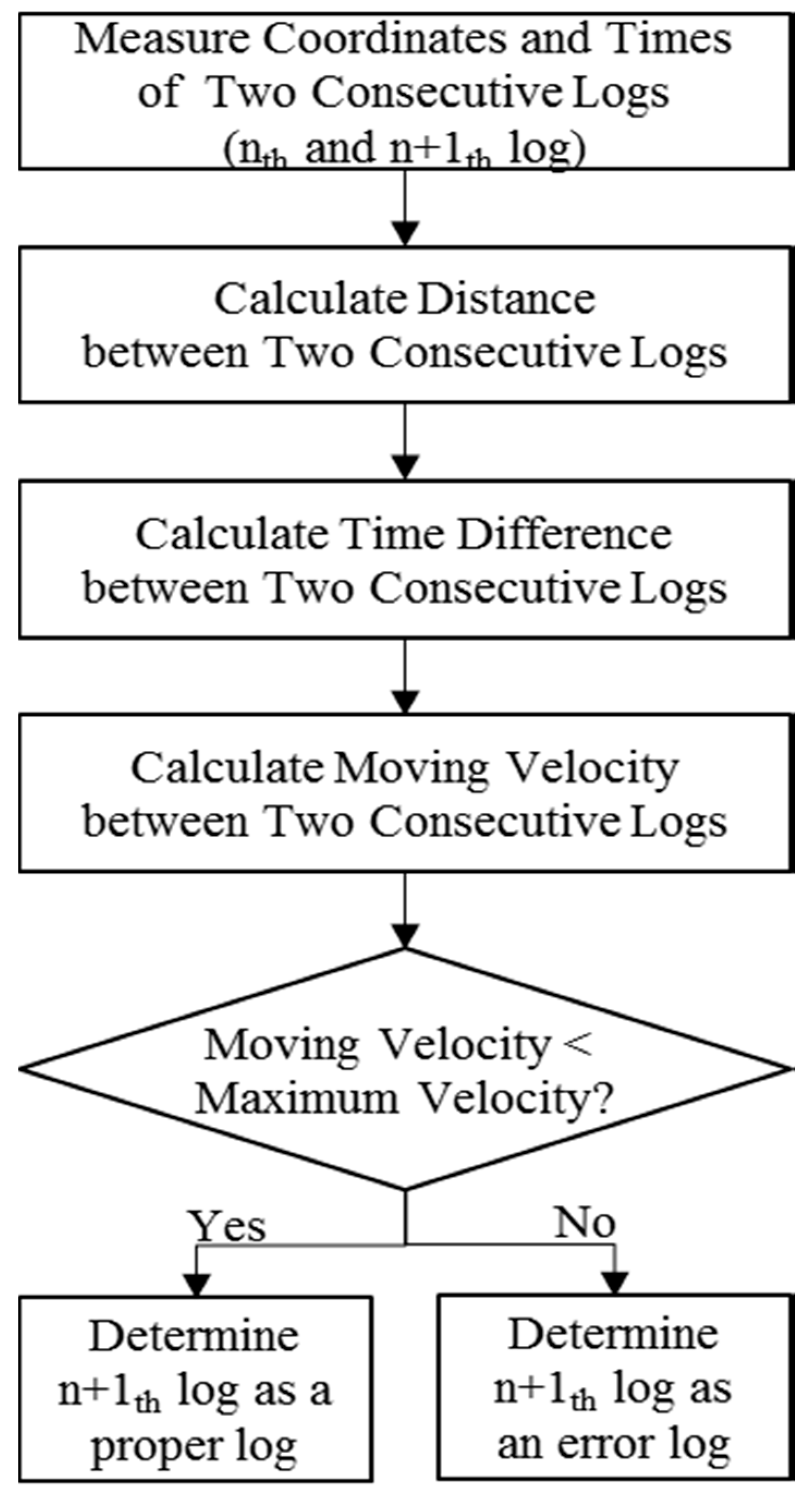
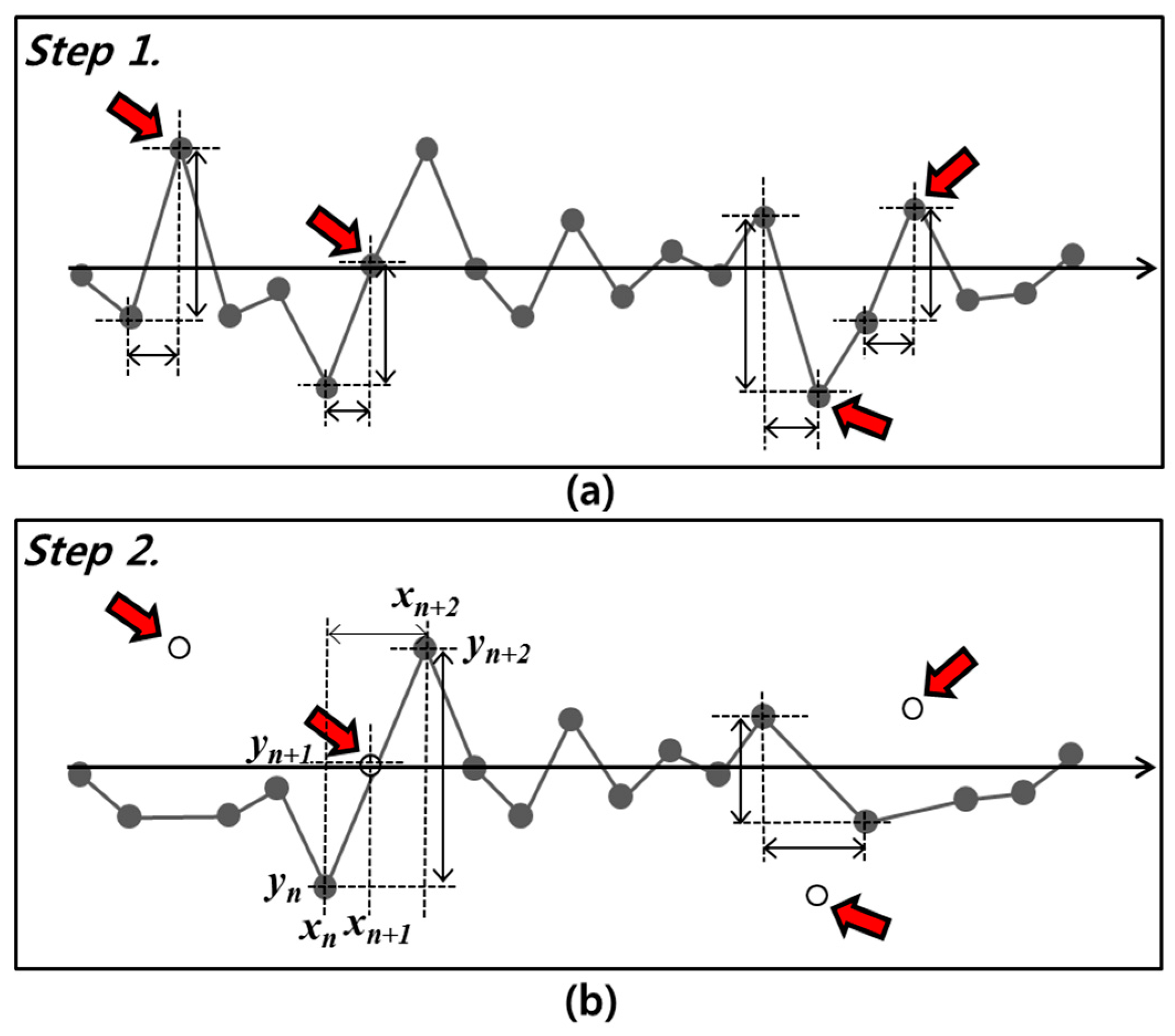
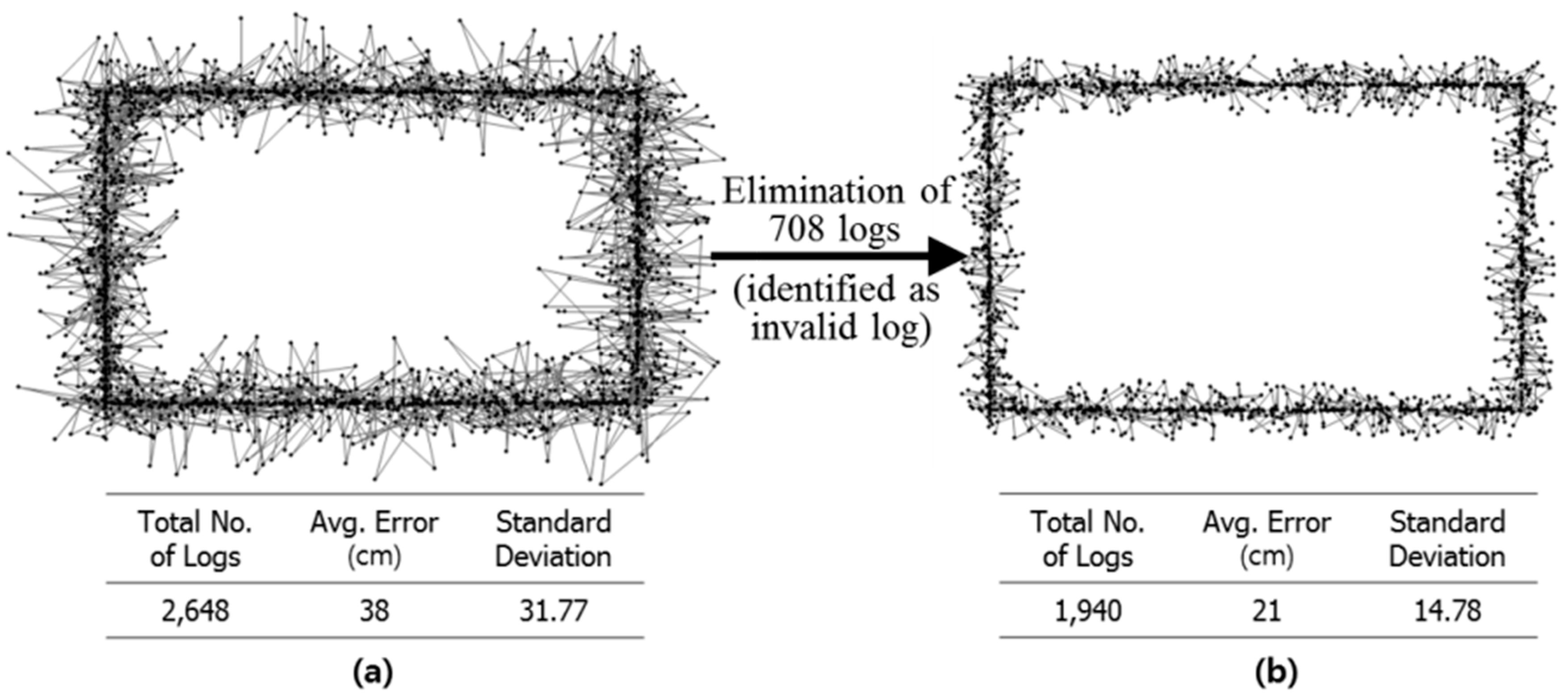
3.1. Algorithm Development to Overcome Multi-Path
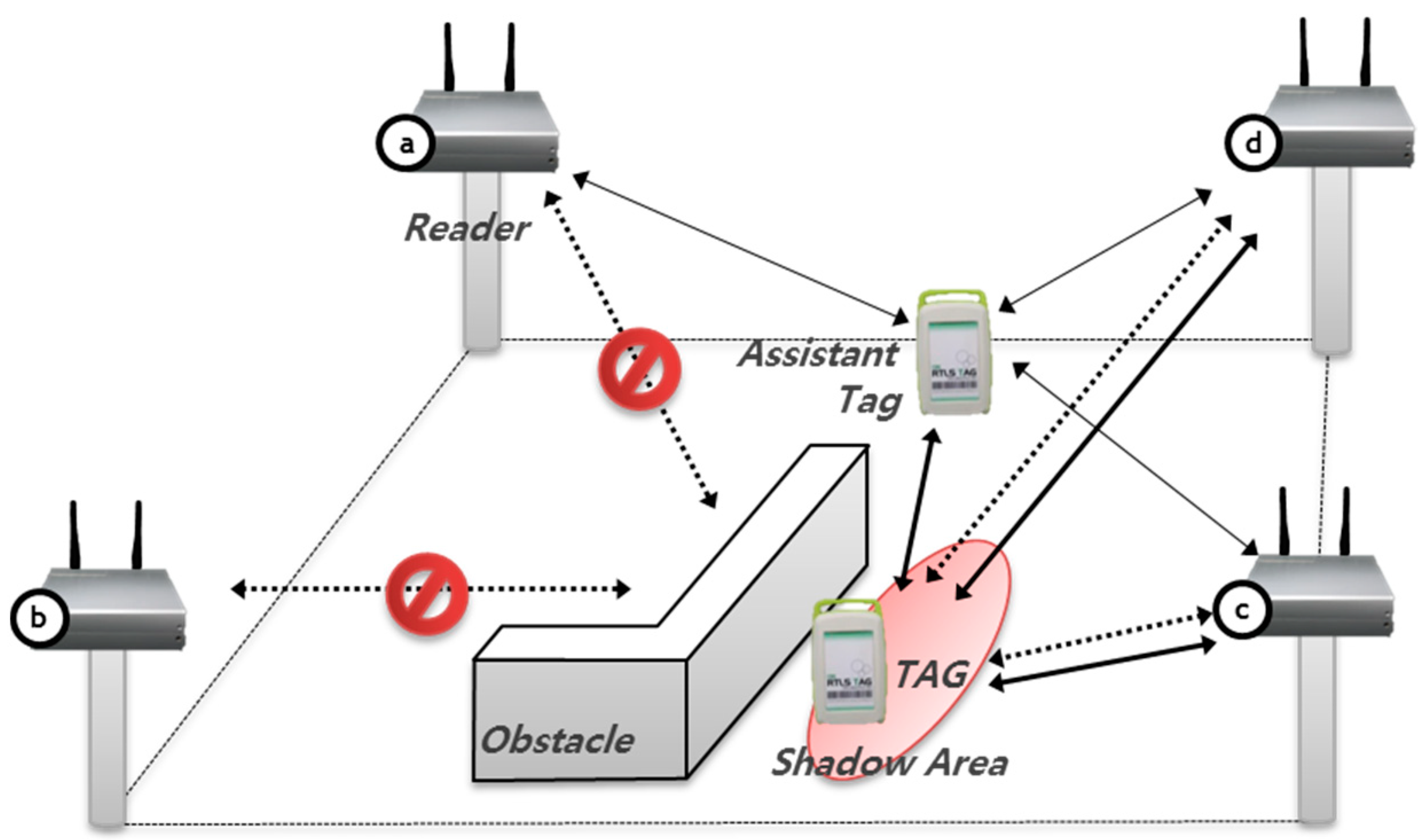
3.2. Application of Assistant Tags
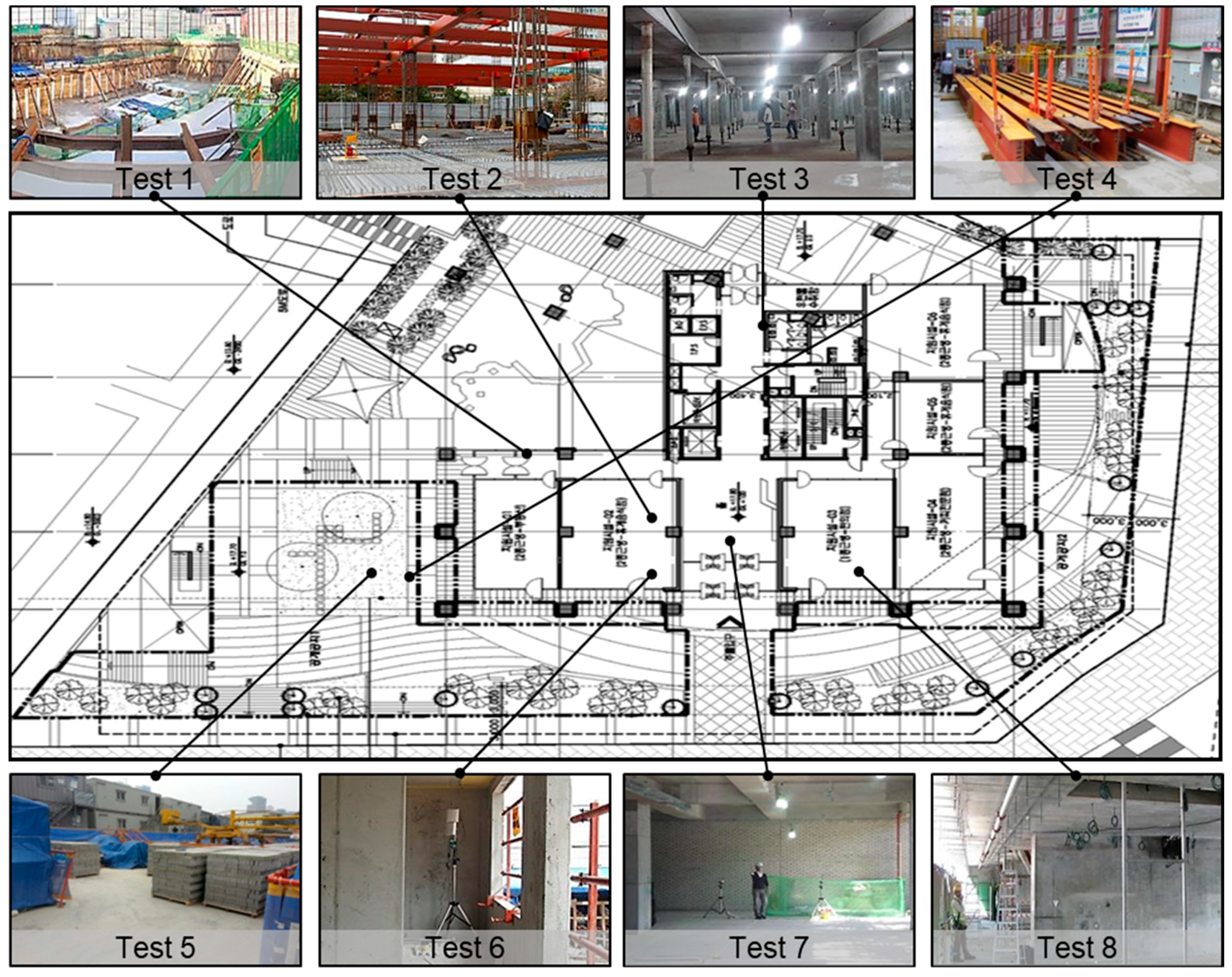
3.3. Experimental Settings
4. Results
4.1. Location Tracking Accuracy
- Accuracy experiment A: location tracking applying neither the error mitigation algorithms nor the assistant tags;
- Accuracy experiment B: location tracking applying the error mitigation algorithms only
- Accuracy experiment C: location tracking applying the assistant tags only
- Accuracy experiment D: location tracking applying both the error mitigation algorithms and the assistant tags.
4.2. Location Tracking Estimation Time
- Time experiment A: measuring the estimation time when applying neither location tracking error mitigation algorithms nor assistant tags (i.e., the same to the accuracy experiment A in Table 1).
- Time experiment B: measuring the estimation time when applying both location tracking error mitigation algorithms and assistant tags (i.e., the same to the accuracy experiment D in Table 1).
- Time experiment C: measuring the estimation time when applying the floor classification method in addition to the error mitigation algorithms and assistant.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Amponsah-Tawiah, K. Occupational health and safety and sustainable development in Ghana. Int. J. Bus. Adm. 2013, 4, 74. [Google Scholar] [CrossRef]
- McKeown, R. Education for Sustainable Development Toolkit; Portland State University: Portland, OR, USA, 2002; Available online: http://www.esdtoolkit.org/ (accessed on 27 April 2018).
- Willard, B. The New Sustainability Advantage: Seven Business Case Benefits of a Triple Bottom Line; New Society Publishers: Gabriola, BC, Canada, 2012. [Google Scholar]
- Navon, R.; Kolton, O. Model for Automated Monitoring of Fall Hazards in Building Construction. J. Constr. Eng. Manag. 2006, 132, 733–740. [Google Scholar] [CrossRef]
- Fullerton, C.; Allread, B.; Teizer, J. Pro-Active-Real-Time Personnel Warning System. Available online: https://ascelibrary.org/doi/abs/10.1061/41020(339)4 (accessed on 8 April 2018).
- Wu, W.; Yang, H.; Chew, D.A.S.; Yang, S.; Gibb, A.G.F.; Li, Q. Towards an autonomous real-time tracking system of near-miss accidents on construction sites. Autom. Constr. 2010, 19, 134–141. [Google Scholar] [CrossRef]
- Chae, S.; Yoshida, T. Application of RFID technology to prevention of collision accident with heavy equipment. Autom. Constr. 2010, 19, 368–374. [Google Scholar] [CrossRef]
- Lee, H.; Lee, K.; Park, M.; Baek, Y.; Lee, S. RFID-Based Real-Time Locating System for Construction Safety Management. J. Comput. Civ. Eng. 2012, 26, 366–377. [Google Scholar] [CrossRef]
- Teizer, J.; Castro-Lacouture, D. Combined Ultra-Wideband Positioning and Range Imaging Sensing for Productivity and Safety Monitoring in Building Construction. In Proceedings of the 2007 ASCE International Workshop on Computing in Engineering, Reston, VA, USA, 24–27 July 2007; pp. 681–688. [Google Scholar]
- Teizer, J.; Caldas, C.; Haas, C. Real-Time Three-Dimensional Occupancy Grid Modeling for the Detection and Tracking of Construction Resources. J. Constr. Eng. Manag. 2007, 133, 880–888. [Google Scholar] [CrossRef]
- Chin, S.; Yoon, S.; Choi, C.; Cho, C. RFID+4D CAD for Progress Management of Structural Steel Works in High-Rise Buildings. J. Comput. Civ. Eng. 2008, 22, 74–89. [Google Scholar] [CrossRef]
- Cheng, T.; Teizer, J. Real-Time Data Collection and Visualization Technology in Construction. In Proceedings of the Construction Research Congress, ASCE, Reston, VA, USA, 8–10 May 2010; pp. 339–348. [Google Scholar]
- Song, J.; Haas, C.; Caldas, C. Tracking the Location of Materials on Construction Job Sites. J. Constr. Eng. Manag. 2006, 132, 911–918. [Google Scholar] [CrossRef]
- Torrent, D.; Caldas, C. Methodology for Automating the Identification and Localization of Construction Components on Industrial Projects. J. Comput. Civ. Eng. 2009, 23, 3–13. [Google Scholar] [CrossRef]
- Saidi, K.S.; Teizer, J.; Franaszek, M.; Lytle, A.M. Static and dynamic performance evaluation of a commercially-available ultra wideband tracking system. Autom. Constr. 2011, 20, 519–530. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.; Park, M.; Chung, B.; Hwang, S. Automated hazardous area identification using laborers’ actual and optimal routes. Autom. Constr. 2016, 65, 21–32. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, C.R.; Yang, K. Identifying Safety Hazards Using Collective Bodily Responses of Workers. J. Constr. Eng. Manag. 2017, 143, 04016090–1-12. [Google Scholar] [CrossRef]
- Garmin Corporation, About GPS. Available online: http://www8.garmin.com/aboutGPS/ (accessed on 4 April 2018).
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Jin, G.Y.; Lu, X.Y.; Park, M.S. An indoor localization mechanism using active RFID tag. In Proceedings of the IEEE International Confernational on Sensor Networks, Ubiquitous, and Trustworthy Computing, Taichung, Taiwan, 5–7 June 2006; pp. 1–4. [Google Scholar]
- Han, J.; Zhao, Y.; Cheng, Y.S.; Wong, T.L.; Wong, C.H. Improving Accuracy for 3D RFID Localization. Int. J. Distrib. Sens. Netw. 2012, 2012, 865184. [Google Scholar] [CrossRef]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the IEEE 15th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L.; Zhao, W. Localization technologies for indoor human tracking. In Proceedings of the IEEE 5th International Conference on Future Information Technology (FutureTech), Busan, Korea, 21–23 May 2010; pp. 1–6. [Google Scholar]
- Yarovoy, A.G.; Zhuge, X.; Savelyev, T.G.; Ligthart, L.P. Comparison of UWB technologies for human being detection with radar. In Proceedings of the IEEE European Microwave Conference, Munich, Germany, 9–12 October 2007; pp. 1574–1577. [Google Scholar]
- Mora, H.; Gilart-Iglesias, V.; Pérez-del Hoyo, R.; Andújar-Montoya, M.D. A Comprehensive System for Monitoring Urban Accessibility in Smart Cities. Sensors 2017, 17, 1834. [Google Scholar] [CrossRef] [PubMed]
- Mora-Mora, H.; Gilart-Iglesias, V.; Gil, D.; Sirvent-Llamas, A. A computational architecture based on RFID sensors for traceability in smart cities. Sensors 2015, 15, 13591–13626. [Google Scholar] [CrossRef] [PubMed]
- Gilart-Iglesias, V.; Mora, H.; Pérez-delHoyo, R.; García-Mayor, C. A computational method based on radio frequency technologies for the analysis of accessibility of disabled people in sustainable cities. Sustainability 2015, 7, 14935–14963. [Google Scholar] [CrossRef]
- Skibniewski, M.J.; Jang, W.S. Localization Technique for Automated Tracking of Construction Materials Utilizing Combined RF and Ultrasound Sensor Interfaces. In Proceedings of the ASCE Computing in Civil Engineering, Reston, VA, USA, 24–27 July 2007; pp. 657–664. [Google Scholar]
- Son, S.; Park, Y.; Baek, Y. Design and Implementation of Enhanced Asset Locating System for Vehicle Pooling in a Port Terminal. In Proceedings of the 2013 IEEE 27th International Conference on Advanced Information Networking and Applications (AINA), Barcelona, Spain, 25–28 March 2013; pp. 710–715. [Google Scholar]
- Lei, Z.; Taghaddos, H.; Olearczyk, J.; Al-Hussein, M.; Hermann, U. Automated Method for Checking Crane Paths for Heavy Lifts in Industrial Projects. J. Constr. Eng. Manag. 2013, 139, 04013011. [Google Scholar] [CrossRef]
- Cho, H.; Jung, Y.; Choi, H.; Jang, H.; Son, S.; Baek, Y. Precise location tracking system based on time difference of arrival over LR-WPAN. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, San Francisco, CA, USA, 19 September 2008; pp. 67–72. [Google Scholar]
- Mullen, D. The application of RFID technology in a Port. Port Technol. Int. 2005, 22, 181–182. [Google Scholar]
- Browning, R.C.; Baker, E.A.; Herron, J.A.; Kram, R. Effects of obesity and sex on the energetic cost and preferred speed of walking. J. Appl. Physiol. 2006, 100, 390–398. [Google Scholar] [CrossRef] [PubMed]
- Mohler, B.J.; Thompson, W.B.; Creem-Regehr, S.H.; Pick, H.L., Jr.; Warren, W.H., Jr. Visual flow influences gait transition speed and preferred walking speed. Exp. Brain Res. 2007, 181, 221–228. [Google Scholar] [CrossRef] [PubMed]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the ACM 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The flooding time synchronization protocol. In Proceedings of the ACM 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49. [Google Scholar]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1996; Volume 2. [Google Scholar]
- Yu, K.; Sharp, I.; Guo, Y.J. Ground-Based Wireless Positioning; John Wiley & Sons: Hoboken, NJ, USA, 2009; Volume 5. [Google Scholar]
- Rohrig, C.; Muller, M. Indoor location tracking in non-line-of-sight environments using a IEEE 802.15. 4a wireless network. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, St. Louis, MO, USA, 10–15 October 2009; pp. 552–557. [Google Scholar]
- Park, S.H.; Kim, Y.J.; Lee, H.C.; Lim, M.T. Improved adaptive particle filter using adjusted variance and gradient data. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Seoul, Korea, 20–22 August 2008; pp. 650–655. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tests | Tracking Environments | Location Tracking Accuracy | ||||
|---|---|---|---|---|---|---|
| Experiment A | Experiment B | Experiment C | Experiment D | |||
| Test 1 | Earth Work Area (Outdoor) | Tracking Error | 138 cm | 61 cm | 47 cm | 38 cm |
| Improvement | - | 55.8% | 65.9% | 72.5% | ||
| Test 2 | Steel Work Area (Outdoor) | Tracking Error | 158 cm | 120 cm | 96 cm | 70 cm |
| Improvement | - | 24.1% | 39.2% | 55.7% | ||
| Test 3 | Underground Parking Lot | Tracking Error | 116 cm | 73 cm | 76 cm | 51 cm |
| Improvement | - | 37.1% | 34.5% | 56.0% | ||
| Test 4 | Stock Yard (H-Beam piled) | Tracking Error | 791 cm | 321 cm | 148 cm | 96 cm |
| Improvement | - | 59.4% | 81.3% | 87.9% | ||
| Test 5 | Stock Yard (Brick piled) | Tracking Error | 549 cm | 243 cm | 152 cm | 88 cm |
| Improvement | - | 55.7% | 72.3% | 84.0% | ||
| Test 6 | Frame Structure (Indoor) | Tracking Error | 127 cm | 80 cm | 78 cm | 53 cm |
| Improvement | - | 37.0% | 38.6% | 58.3% | ||
| Test 7 | Wall Structure (Indoor) | Tracking Error | 78 cm | 71 cm | 57 cm | 35 cm |
| Improvement | - | 9.0% | 26.9% | 55.1% | ||
| Test 8 | Finishing Work Area | Tracking Error | 86 cm | 46 cm | 61 cm | 33 cm |
| Improvement | - | 46.5% | 29.1% | 61.6% | ||
| Average | Tracking Error | 255 cm | 127 cm | 89 cm | 58 cm | |
| Improvement | - | 50.3% | 65.0% | 77.3% | ||
| Experimental Settings | Location Tracking Estimation Time (ms) | Time Reduction ((B–C)/B) | ||||
|---|---|---|---|---|---|---|
| Number of Floors | Number of Readers | Number of Tags | Experiment A | Experiment B | Experiment C | |
| 1 | 4 | 10 | 157 | 227 | 173 | 23.8% |
| 20 | 282 | 348 | 309 | 11.2% | ||
| 30 | 418 | 525 | 445 | 15.2% | ||
| 3 | 12 | 10 | 284 | 377 | 307 | 18.6% |
| 30 | 376 | 497 | 424 | 14.7% | ||
| 50 | 483 | 687 | 519 | 24.5% | ||
| 5 | 20 | 10 | 254 | 409 | 298 | 27.1% |
| 30 | 448 | 564 | 420 | 25.5% | ||
| 50 | 756 | 863 | 628 | 27.2% | ||
| Average | 384.2 | 499.7 | 391.4 | 21.7% | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Han, S. Accuracy Improvement of Real-Time Location Tracking for Construction Workers. Sustainability 2018, 10, 1488. https://doi.org/10.3390/su10051488
Kim H, Han S. Accuracy Improvement of Real-Time Location Tracking for Construction Workers. Sustainability. 2018; 10(5):1488. https://doi.org/10.3390/su10051488
Chicago/Turabian StyleKim, Hyunsoo, and Sangwon Han. 2018. "Accuracy Improvement of Real-Time Location Tracking for Construction Workers" Sustainability 10, no. 5: 1488. https://doi.org/10.3390/su10051488
APA StyleKim, H., & Han, S. (2018). Accuracy Improvement of Real-Time Location Tracking for Construction Workers. Sustainability, 10(5), 1488. https://doi.org/10.3390/su10051488