Formation Mechanism and Coping Strategy of Public Emergency for Urban Sustainability: A Perspective of Risk Propagation in the Sociotechnical System


Abstract
1. Introduction
2. Research Framework
3. Urban Sociotechnical System Risk Propagation Chain and its Models
3.1. Urban Sociotechnical System Risk Propagation Chain
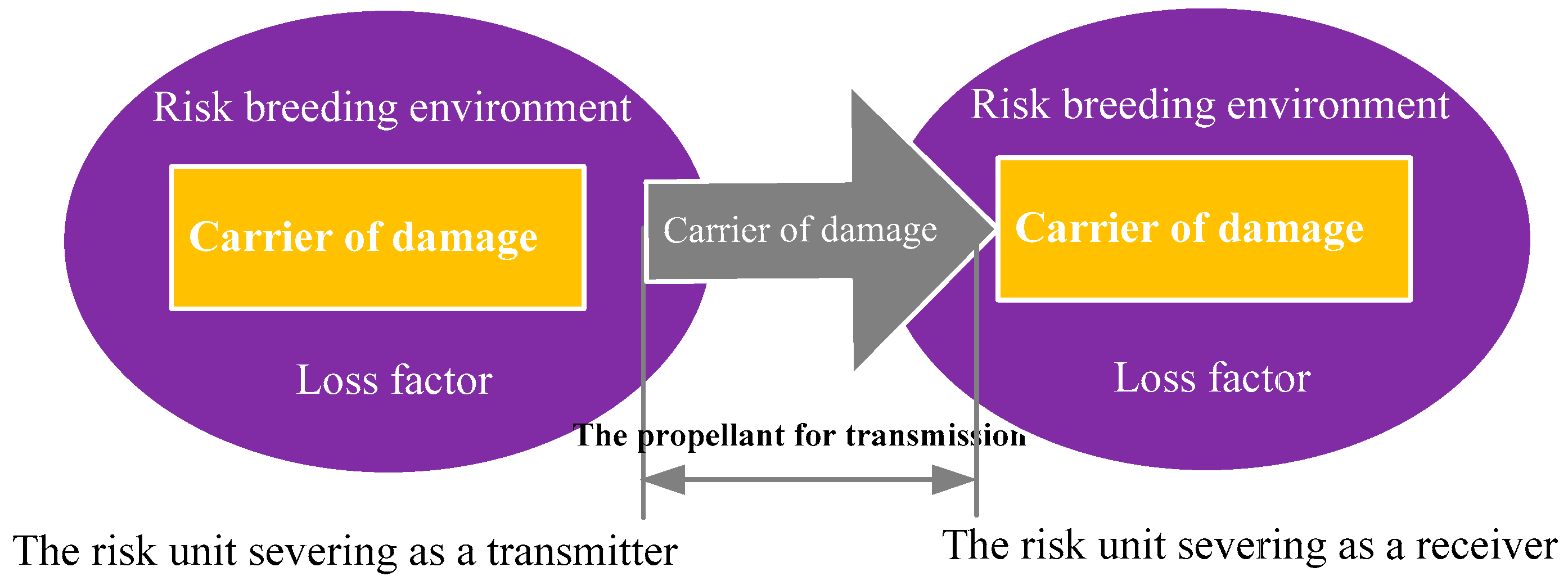
3.1.1. Risk Unit
Carrier of Damage
Loss Factor
Risk Breeding Environment
3.1.2. Risk Propagation
The Risk Unit Serving as a Transmitter
The Propellant for Transmission
The Risk Unit Serving as a Receiver
3.1.3. Risk Propagation Chain
3.2. Urban Sociotechnical System Risk Propagation Chain Model
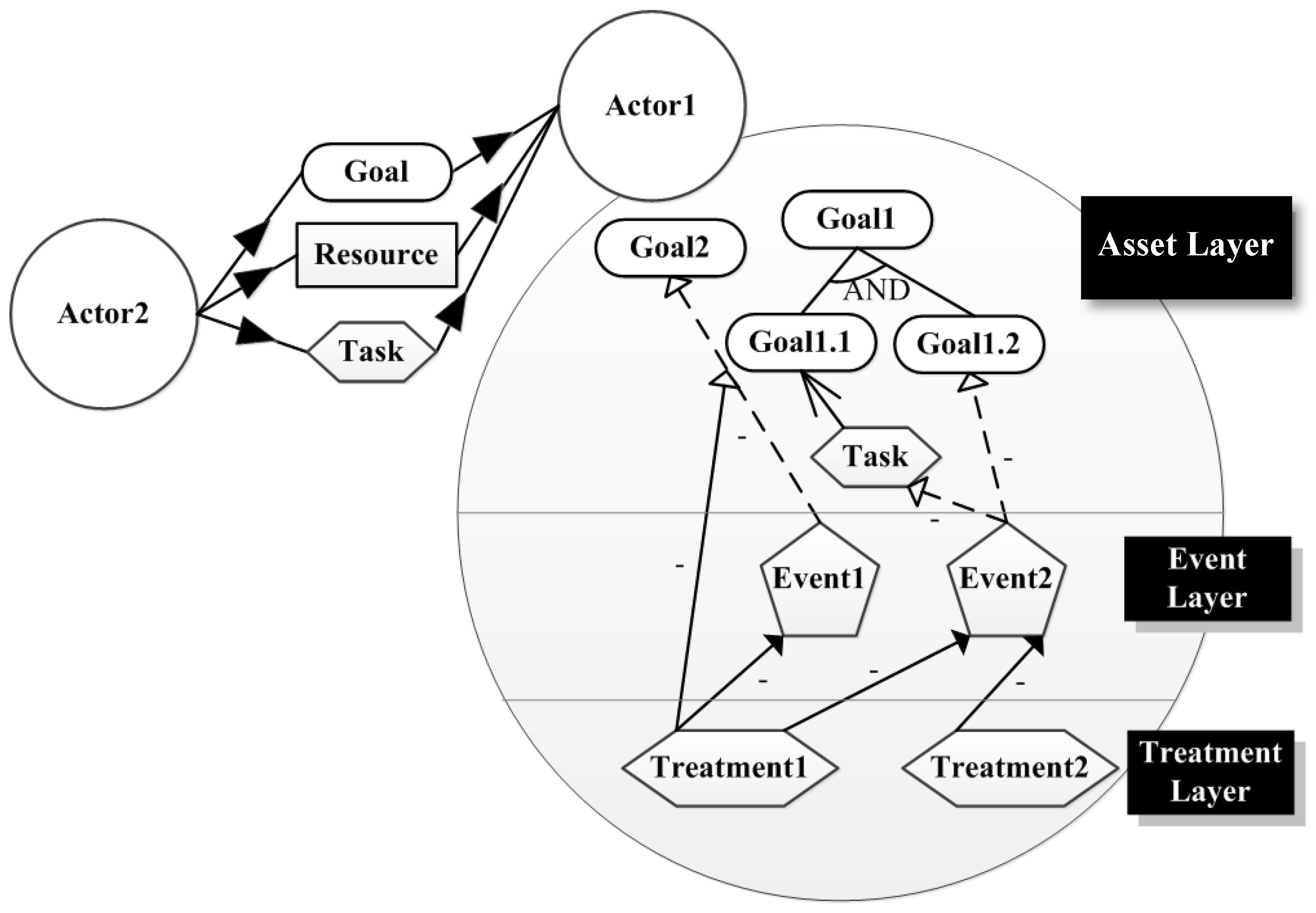
3.2.1. Tropos Goal-Risk Framework
3.2.2. Urban Sociotechnical System Model
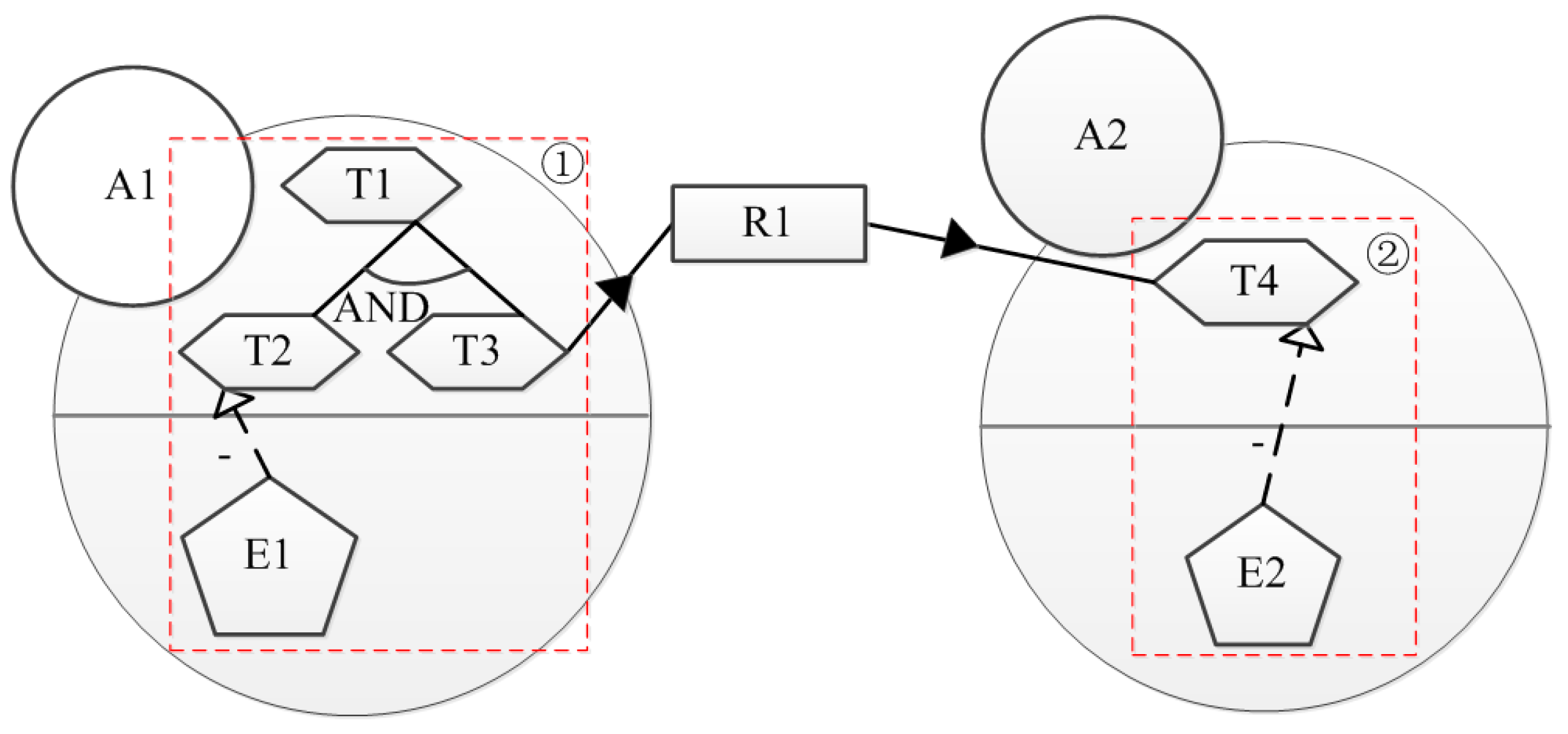
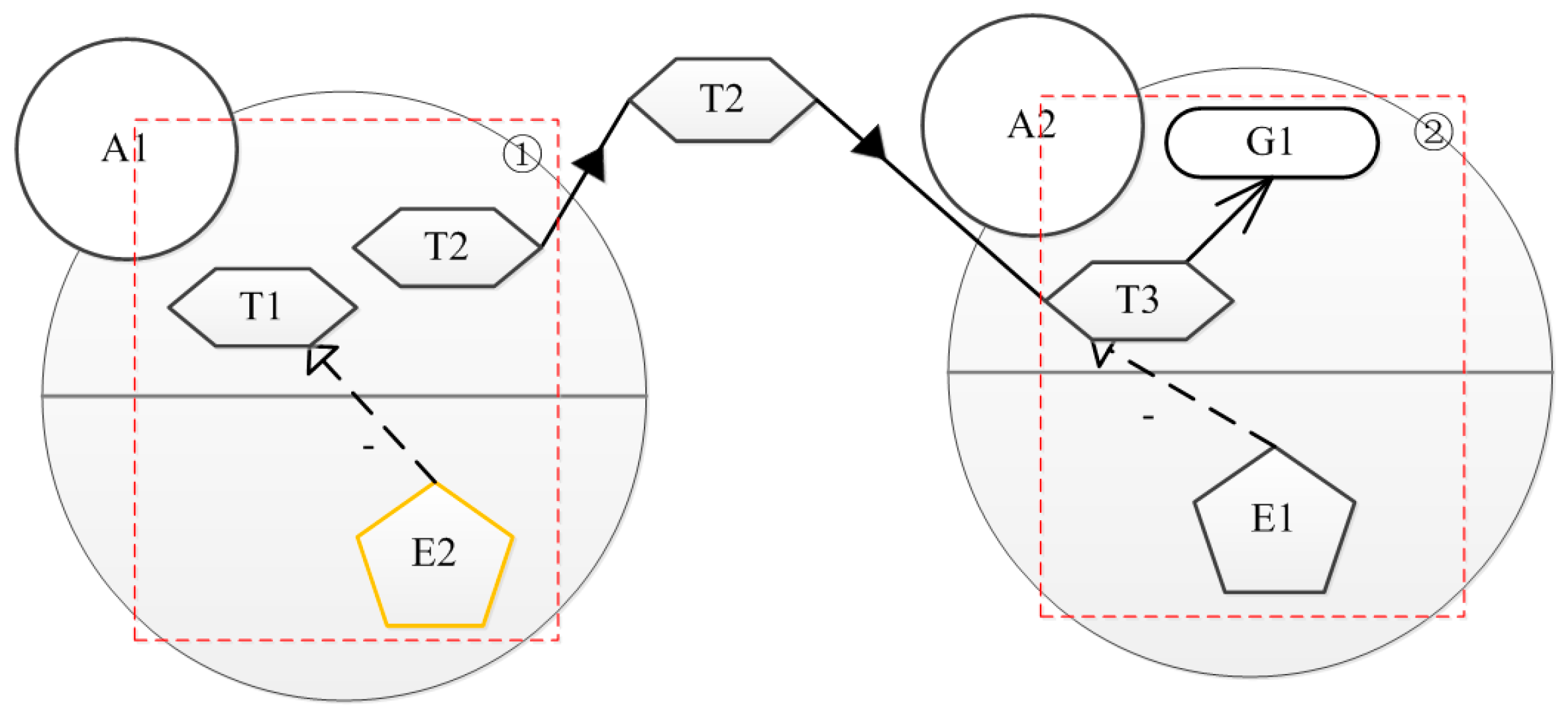
3.2.3. Risk Propagation Chain Model
4. Formation Mechanism of Urban Public Emergency
4.1. Formation Mechanism of Risk Propagation Chain
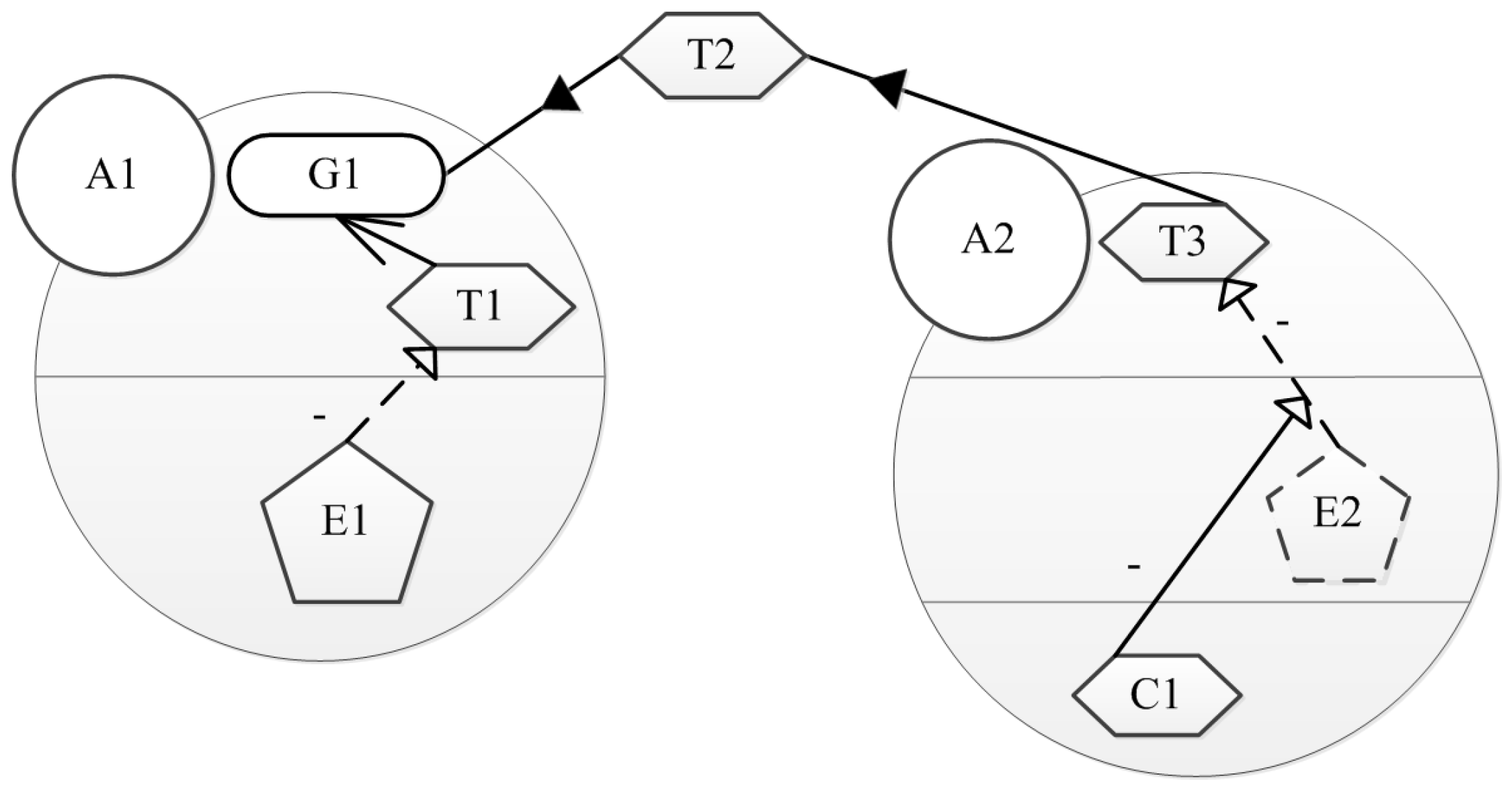
4.1.1. Basic Modes of Risk Propagation
The Basic Modes Focusing on the Transmitter
The Basic Modes Focusing on the Receiver
The Basic Modes Focusing on the Transmitter(s) and the Receiver(s)
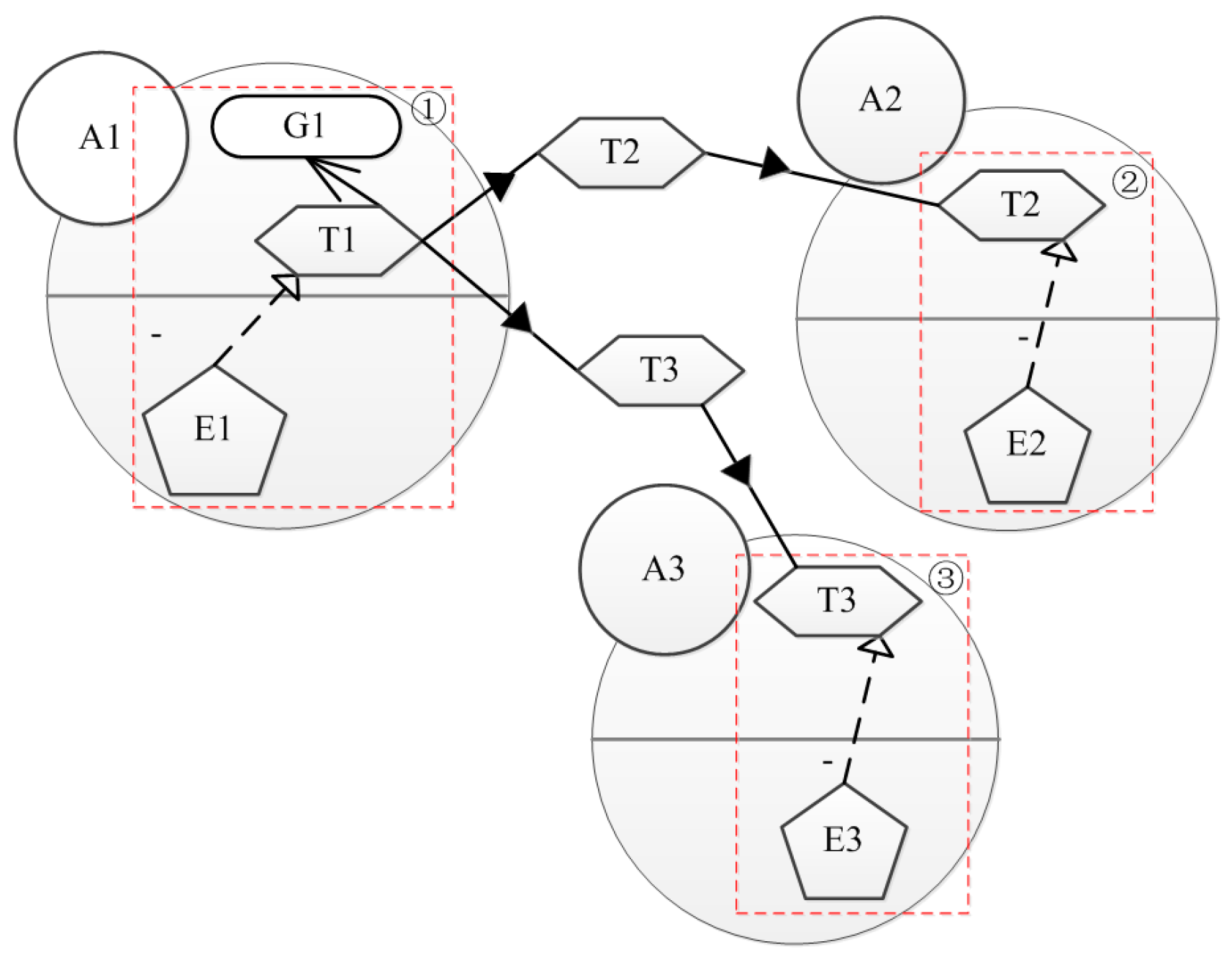
4.1.2. Basic Modes of Risk Propagation Chain
Chain Pattern
Network Pattern
4.2. Formation Mechanism of Urban Public Emergency
4.2.1. The Formation Process of Urban Public Emergency
4.2.2. The Formation form of Urban Public Emergency
5. Countermeasures of Urban Public Emergency
5.1. Countermeasures before Emergency
5.1.1. Controlling the Risk Units Serving as Transmitters
5.1.2. Controlling the Propellants for Propagation
5.1.3. Controlling the Risk Units Serving as Receivers
5.2. Countermeasures after Emergencies
6. Case Study
6.1. Risk Propagation Chain Model Built for Rear-End Collision
6.1.1. Subway Sociotechnical System Model
6.1.2. Risk Propagation Chain Model for Rear-end Collision
6.2. Formation Mechanism of Rear-End Collision
6.3. Countermeasures for Rear-End Collision
7. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hu, G.L. Problems and Countermeasures of urban sustainable development in China. J. Huazhong Univ. Sci. Technol. 1998, 4, 15–17. (In Chinese) [Google Scholar]
- Albertí, J.; Balaguera, A.; Brodhag, C.; Fullana-i-Palmer, P.J. Towards life cycle sustainability assessment of cities. A review of background knowledge. Sci. Total Environ. 2017, 609, 1049–1063. [Google Scholar] [CrossRef] [PubMed]
- Daniels, B.; Zaunbrecher, B.; Paas, B.; Ottermanns, R.; Ziefle, M.; Roß-Nickoll, M.J. Assessment of urban green space structures and their quality from a multidimensional perspective. Sci. Total Environ. 2018, 615, 1364–1378. [Google Scholar] [CrossRef]
- Vincenzi, S.L.; Possan, E.; Andrade, D.F.D.; Pituco, M.M.; de Oliveira Santos, T.; Jasse, E.P.J. Assessment of Environmental Sustainability Perception through Item Response Theory: A Case Study in Brazil. J. Clean. Prod. 2018, 170, 1369–1386. [Google Scholar] [CrossRef]
- Valdes, H.M.; Purcell, P.H. Making Cities Resilient Report 2012: A global snapshot of how local governments reduce disaster risk. Int. J. Disaster Resil. Built Environ. 2012, 4. [Google Scholar] [CrossRef]
- Desouza, K.C.; Flanery, T.H. Designing, planning, and managing resilient cities: A conceptual framework. Cities 2013, 35, 89–99. [Google Scholar] [CrossRef]
- Tabibian, M.; Movahed, S. Towards resilient and sustainable cities: A conceptual framework. Sci. Iran. 2016, 23, 2081–2093. [Google Scholar] [CrossRef]
- Bernal, G.A.; Salgado-Gálvez, M.A.; Zuloaga, D.; Tristancho, J.; González, D.; Cardona, O.D. Integration of Probabilistic and Multi-Hazard Risk Assessment within Urban Development Planning and Emergency Preparedness and Response: Application to Manizales, Colombia. Int. J. Disaster Risk Sci. 2017, 8, 270–283. [Google Scholar] [CrossRef]
- Godschalk, D.R. Urban hazard mitigation: Creating resilient cities. Nat. Hazards Rev. 2003, 4, 136–143. [Google Scholar] [CrossRef]
- Zhao, L.D.; Lu, Y.Q. Research on economy and sustainability of the urban emergency system. Ecol. Econ. 2008, 6, 86–89. (In Chinese) [Google Scholar]
- Monares, A.; Ochoa, S.F.; Pino, J.A.; Herskovic, V.; Rodriguez-Covili, J.; Neyem, A.J. Mobile computing in urban emergency situations: Improving the support to firefighters in the field. Expert Syst. Appl. 2011, 38, 1255–1267. [Google Scholar] [CrossRef]
- Jacob, M.; Hellstrom, T. Policy understanding of science, public trust and the BSE-CJD crisis. J. Hazard. Mater. 2000, 78, 303–317. [Google Scholar] [CrossRef]
- Cheung, K.F.; Phadke, A.C.; Wei, Y.; Rojas, R.; Douyere, Y.J.-M.; Martino, C.D.; Houston, S.H.; Liu, P.L.-F.; Lynett, P.J.; Dodd, N.; et al. Modeling of storm-induced coastal flooding for emergency management. Ocean Eng. 2003, 30, 1353–1386. [Google Scholar] [CrossRef]
- Apel, H.; Thieken, A.H.; Merz, B.; Blöschl, G. A probabilistic modeling system for assessing flood risks. Nat. Hazards 2006, 38, 79–100. [Google Scholar] [CrossRef]
- Helbing, D.; Ammoser, H.; Kühnert, C. Disasters as extreme events and the importance of networks for disaster response management. In Extreme Events in Nature and Society; Springer: Berlin/Heidelberg, Germany, 2006; pp. 319–348. [Google Scholar] [CrossRef]
- Willis, H.H.; Latourrette, T.; Kelly, T.K.; Hickey, S.; Neill, S. Terrorism Risk Modeling for Intelligence Analysis and Infrastructure Protection; Technical Report; RAND Corporation: Santa Monica, CA, USA, 2007. [Google Scholar]
- Korte, J. Risk-based emergency decision support. Reliab. Eng. Syst. Saf. 2003, 82, 235–246. [Google Scholar] [CrossRef]
- Orosz, M. Risk Analyst Workbench Design and Architecture; Create Report; University of Southern California: Los Angeles, CA, USA, 2005. [Google Scholar]
- Goto, H.; Takayasu, H.; Takayasu, M. Estimating risk propagation between interacting firms on inter-firm complex network. PLoS ONE 2017, 12, e185712. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Li, M.; Chen, F. Impact propagation and risk assessment of requirement changes for software development projects based on design structure matrix. Int. J. Proj. Manag. 2012, 30, 363–373. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, N. Development of a mitigation strategy against the cascading propagation of risk in R&D network. Saf. Sci. 2014, 68, 161–168. [Google Scholar]
- Liu, H.; He, W.; Guo, J.; Huang, Q. Risk propagation mechanism: Qingdao Crude Oil Leaking and Explosion case study. Eng. Fail. Anal. 2015, 56, 555–561. [Google Scholar] [CrossRef]
- Garvey, M.D.; Carnovale, S.; Yeniyurt, S. An analytical framework for supply network risk propagation: A Bayesian network approach. Eur. J. Oper. Res. 2015, 243, 618–627. [Google Scholar] [CrossRef]
- Li, Z.; Xu, G.A.; Ban, X.F.; Zhang, Y.; Hu, Z.M. Complex information system security risk propagation research based on cellular automata. Acta Phys. Sin. 2013, 62, 750–754. [Google Scholar]
- Trotter, M.J.; Salmon, P.M.; Lenné, M.G. Impromaps: Applying Rasmussen’s Risk Management Framework to improvisation incidents. Saf. Sci. 2014, 64, 60–70. [Google Scholar] [CrossRef]
- Reason, J. A systems approach to organizational error. Ergonom 1995, 38, 1708–1721. [Google Scholar] [CrossRef]
- Burton, I.; Kates, R.W.; White, G.F. The Environment as Hazard. 1993. Available online: https://books.google.co.uk/books?hl=en&lr=&id=8aK1YcbL5_8C&oi=fnd&pg=PR7&dq=The+Environment+as+Hazard&ots=A1rrs2Ok70&sig=K02HswP7sA0A57U8QTM3epsoFO8#v=onepage&q=The%20Environment%20as%20Hazard&f=false (accessed on 1 February 2018).
- Paté-Cornell, M.E. A post mortem analysis of the Piper Alpha accident: Technical and organizational factors. Risk Anal. 1999, 13, 215–232. [Google Scholar] [CrossRef]
- Pitblado, R.; Bain, B.; Falck, A.; Litl, K.J.; Spitzenberger, C. Frequency data and modification factors used in QRA studies. J. Loss Prev. Process Ind. 2011, 24, 249–258. [Google Scholar] [CrossRef]
- Pasman, H.J.; Knegtering, B.; Rogers, W.J. A holistic approach to control process safety risks: Possible ways forward. Reliab. Eng. Syst. Saf. 2013, 117, 21–29. [Google Scholar] [CrossRef]
- Garbolino, E.; Chery, J.P.; Guarnieri, F. A simplified approach to risk assessment based on system dynamics: An industrial case study. Risk Anal. 2016, 36, 16–29. [Google Scholar] [CrossRef] [PubMed]
- Svedung, I.; Rasmussen, J. Graphic representation of accident scenarios: Mapping system structure and the causation of accidents. Saf. Sci. 2002, 40, 397–417. [Google Scholar] [CrossRef]
- Venkatasubramanian, V.; Zhang, Z. TeCSMART: A hierarchical framework for modeling and analyzing systemic risk in sociotechnical systems. AIChE J. 2016, 62, 3065–3084. [Google Scholar] [CrossRef]
- Woo, D.M.; Vicente, K.J. Sociotechnical systems, risk management, and public health: Comparing the North Battleford and Walkerton outbreaks. Reliab. Eng. Syst. Saf. 2003, 80, 253–269. [Google Scholar] [CrossRef]
- Trist, E.L.; Bamforth, K.W. Some social and psychological consequences of the Longwall method of coal getting. Hum. Relat. 1951, 4, 3–38. [Google Scholar] [CrossRef]
- Walker, G.H.; Stanton, N.A.; Salmon, P.M.; Jenkins, D.P. A review of sociotechnical systems theory: A classic concept for command and control paradigms. TIES 2009, 9, 479–499. [Google Scholar] [CrossRef]
- Walker, G.H.; Stanton, N.A.; Baber, C.; Wells, L.; Gibson, H.; Salmon, P.M.; Jenkins, D. From ethnography to the EAST Method: A tractable approach for representing distributed cognition in air traffic control. Ergonom 2010, 53, 184–197. [Google Scholar] [CrossRef] [PubMed]
- Read, G.J.M.; Salmon, P.M.; Lenné, M.G.; Stanton, N.A. Designing sociotechnical systems with cognitive work analysis: Putting theory back into practice. Ergonom 2011, 58, 822–851. [Google Scholar] [CrossRef] [PubMed]
- Bresciani, P.; Perini, A.; Giorgini, P.; Giunchiglia, F.; Mylopoulos, J. Tropos: An agent-oriented software development methodology. Auton. Agents Multi-Agent Syst. 2004, 8, 203–236. [Google Scholar] [CrossRef]
- Yudistira, A.; Paolo, G.; John, M. Risk Modeling and Reasoning in Goal Models; Departmental Technical Report; Department of Information and Communication Technology: Quezon City, Philippines, 2006.
- Cassano-Piche, A.L.; Vicente, K.J.; Jamieson, G.A. A test of Rasmussen’s Risk Management Framework in the food safety domain: BSE in the UK. Theor. Issues Ergon. Sci. 2009, 10, 283–304. [Google Scholar] [CrossRef]
- Hu, Y.J.; Su, L.Y. The influence on emergency on the sustainable development and countermeasures. Eastern Forum 2003, 5, 97–102. (In Chinese) [Google Scholar]
- Johansen, I.L.; Rausand, M. Defining complexity for risk assessment of sociotechnical systems: A conceptual framework. J. Risk Reliab. 2014, 228, 272–290. [Google Scholar] [CrossRef]
- Shi, P.J. Theory and practice on disaster system research in a fifth time. J. Nat. Disasters 2005, 18, 1–9. (In Chinese) [Google Scholar]
- Cheng, G.P.; Zhang, J. Product quality risk’s transmission in supply chain based on product gene. Reform. Strategy 2009, 7, 145–148. (In Chinese) [Google Scholar]
- Xia, Z.; Deng, M.R. An analysis on the reasons of company’s risk transmission. Theory Monthly 2007, 2, 164–167. (In Chinese) [Google Scholar]
- Liu, Q.; Cheng, G.P. The management of supply chain risk based on transmission mechanism. Logist. Eng. Manag. 2009, 1, 47–49. (In Chinese) [Google Scholar]
- Feng, N.; Wang, H.J.; Li, M. A security risk analysis model for information systems: Causal relationships of risk factors and vulnerability propagation analysis. Inf. Sci. 2014, 256, 57–73. [Google Scholar] [CrossRef]
- Li, G. Research on supply chain risk conduction mechanism. China Bus. Mark. 2011, 1, 41–44. (In Chinese) [Google Scholar]
- Deng, M. R. The study about enterprise risk conduction and the conducting carrier. Commun. Financ. Account. 2006, 1, 20–22. (In Chinese) [Google Scholar]
- Ghadge, A.; Dani, S.; Kalawsky, R. Systems thinking for modeling risk propagation in supply networks. In Proceedings of the IEEE International Conference on Industrial Engineering and Engineering Management, Singapore, 6–9 December 2011; pp. 1685–1689. [Google Scholar]
- State Council. National Emergency Plan for Public Emergencies; State Council: Beijing, China, 2005. (In Chinese)
- Li, M.A.; Zhang, G.M.; Li, P. Research on the transmission mechanism and transmission path of supply chain risk. Sci. Technol. Inf. Dev. Econ. 2007, 17, 96–98. (In Chinese) [Google Scholar]
- Cheng, G.P.; Qiu, Y.G. Research on the mode of the supply chain risk conduction. J. Wuhan Univ. Technol. 2009, 22, 36–41. (In Chinese) [Google Scholar]
- Xiang, L. Y. Major mass incidents: Based on risk-crisis perspective in public security. J. Nanjing Univ. Technol. 2013, 12, 27–34. (In Chinese) [Google Scholar]
- Rastegar, D.A.; Wright, S.M. Feedback on assessment of risk and risk reduction. Med. Educ. 2004, 38, 567. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name | Icon | Description |
|---|---|---|---|
| Nodes | Actors |  | Stakeholders in the sociotechnical system that have their goals and achieve them by performing tasks using resources. |
| Goals |  | Objectives that actors intend to fulfill. | |
| Tasks |  | Sequences of actions that are used to achieve goals in the asset layer or to treat events in the treatment layer. | |
| Resources |  | A physical or informational entity that can be used to perform the task or achieve the goal. | |
| Events |  | Uncertain factors which can have a negative impact on the achievement of goals or execution of tasks in the asset layer. | |
| Relationships | Dependency relations |  | Dependency relations represent the relationships among actors. |
| OR decomposition |  | Alternatives for the satisfaction of goals, execution of tasks, or the occurrence of events can be modeled by OR decomposition. | |
| AND decomposition |  | Objects (i.e., goals, tasks, and events) can be decomposed into sub-objects by using AND decomposition. | |
| Means-end relations |  | Means-end relations identify the means (e.g., tasks, resources) used to fulfill goals. | |
| Impact relations |  | Impact relations depict the influence of an event on the asset layer. | |
| Contribution relations |  | Contribution relations denote the effects of a node (i.e., a goal, a task, or an event) on another. Contribution relations can be of 4 types: ++, +, --, and-, which respectively present the positive and negative influences. | |
| Alleviation relations |  | Alleviation relations, which can be distinguished into: - and --, are used to model the reduction of the influences of events on the asset layer by adopting the treatments, whose objects of action are impact relations. |
| Focus Points | Basic Elements of Risk Propagation Process | Basic Modes of Risk Propagation | ||
|---|---|---|---|---|
| Transmitter(s) | Propellant(s) | Receiver(s) | ||
| Focusing on the transmitter | √ | Risk transfer | ||
| Risk contagion | ||||
| Focusing on the receiver | √ | Risk overlap | ||
| Risk restraint | ||||
| Risk mutation | ||||
| Focusing on the transmitter(s) and receiver(s) | √ | √ | From one to one | |
| From one to many | ||||
| From many to one | ||||
| Type of Dependency | Depender | Dependum | Dependee | Explanation |
|---|---|---|---|---|
| Goal dependency | Passenger | Goal: prevention of loss of life and property; the timely arrival | Subway system | The subway system directly carries passengers, so it is important to ensure that the subway system works safely. |
| Task dependency | Vehicle subsystem | Task: Automatic dispatching control | Communication signal subsystem | The traffic on Shanghai subway line 10 is automatically controlled by the CBTC system (Communications Based Train Control System). |
| Communication signal subsystem | Task: supply electricity | Power supply subsystem | The operation of the signal system needs electricity supply. | |
| Dispatching command subsystem | Task: manual dispatching control | Vehicle subsystem | To keep the train running safely, manual dispatching control needs to be offered. | |
| Dispatching command subsystem | Task: manual dispatching control | Dispatcher | To keep the train running safely, manual dispatching control needs to be offered. | |
| Resource dependency | Dispatcher | Information: situation of block section | Station attendant | Before giving the telephone block commands, the dispatching control center needs to confirm that the block section is free. |
| Mode of Risk Propagation | Transmitter | Receiver |
|---|---|---|
| risk transfer | ③ | ② |
| ⑦ | ③ | |
| ⑧ | ⑦ | |
| ⑨ | ⑧ | |
| risk overlap | ⑧ | ⑦ |
| ⑨ | ⑧ | |
| risk restraint | ⑥ | ③ |
| risk mutation | ⑤ | ⑥ |
| ② | ① | |
| ③ | ② | |
| ⑦ | ③ | |
| risk propagation from many to one | ⑥ and ⑦ | ③ |
| risk propagation from one to many | ⑨ | ④ and ⑧ |
| risk propagation from one to one | All except for the risk propagations from many to one and frome one to many. | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Lu, Z.; Yang, X.; Zhao, Q.; Gao, D.; Bai, B. Formation Mechanism and Coping Strategy of Public Emergency for Urban Sustainability: A Perspective of Risk Propagation in the Sociotechnical System. Sustainability 2018, 10, 386. https://doi.org/10.3390/su10020386
Deng X, Lu Z, Yang X, Zhao Q, Gao D, Bai B. Formation Mechanism and Coping Strategy of Public Emergency for Urban Sustainability: A Perspective of Risk Propagation in the Sociotechnical System. Sustainability. 2018; 10(2):386. https://doi.org/10.3390/su10020386
Chicago/Turabian StyleDeng, Xiuquan, Zhu Lu, Xinmiao Yang, Qiuhong Zhao, Dehua Gao, and Bing Bai. 2018. "Formation Mechanism and Coping Strategy of Public Emergency for Urban Sustainability: A Perspective of Risk Propagation in the Sociotechnical System" Sustainability 10, no. 2: 386. https://doi.org/10.3390/su10020386
APA StyleDeng, X., Lu, Z., Yang, X., Zhao, Q., Gao, D., & Bai, B. (2018). Formation Mechanism and Coping Strategy of Public Emergency for Urban Sustainability: A Perspective of Risk Propagation in the Sociotechnical System. Sustainability, 10(2), 386. https://doi.org/10.3390/su10020386