Genetic Algorithm for Optimizing Routing Design and Fleet Allocation of Freeway Service Overlapping Patrol

Abstract
:1. Introduction
2. Model Formulation
3. Genetic Algorithm
3.1. Encoding Scheme
3.2. Fitness Function
3.3. Initial Population
3.4. Selection
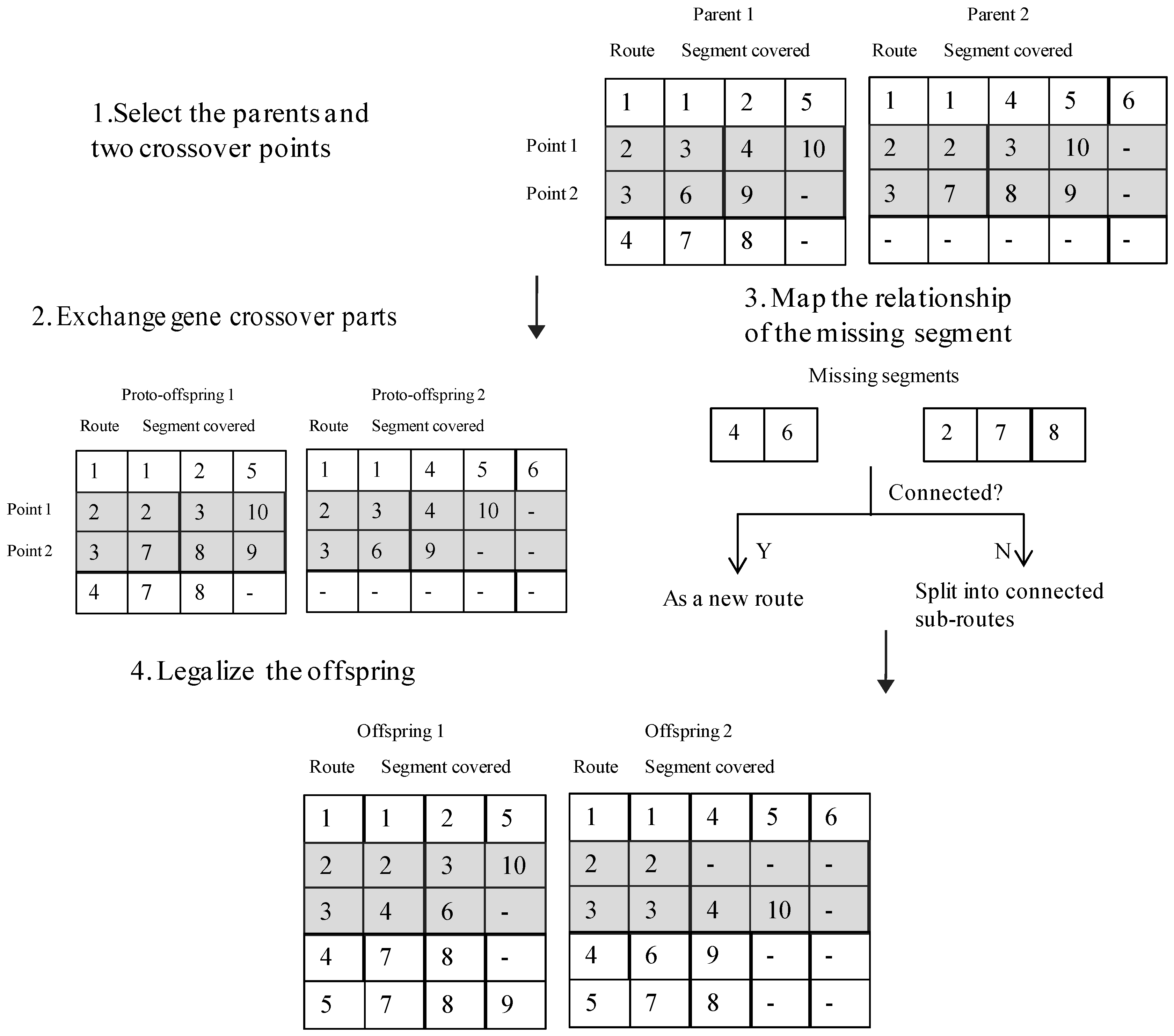
3.5. Crossover
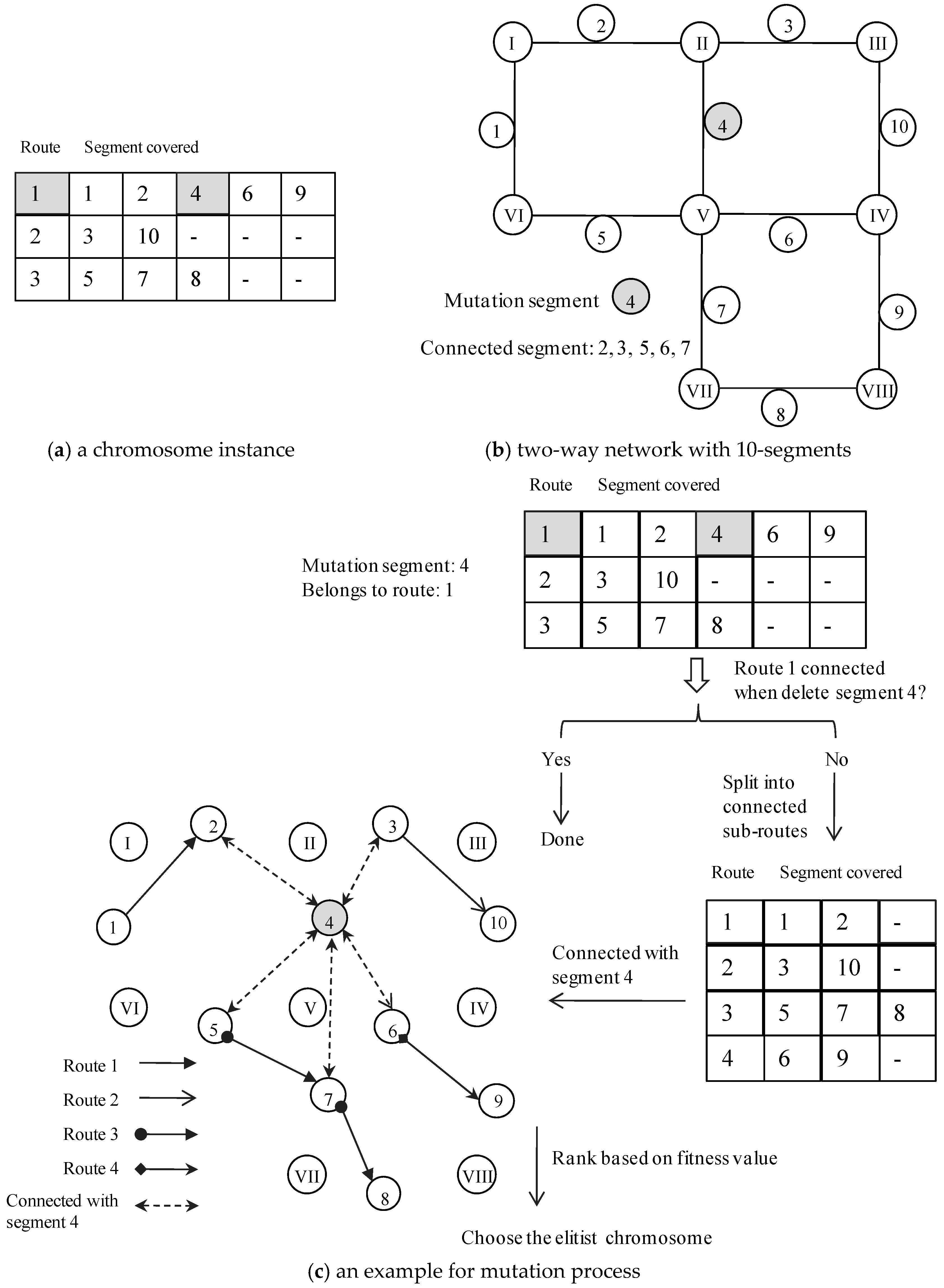
3.6. Mutation
3.7. Elitist Strategy and Niche Strategy
| Algorithm 1: GA. | |
| input: | G(N, A): instance graph; V: number of vehicles; tij and fij: the average travel time and the number of incidents on each segment initialize parameters of GA: P (population size parameter); maxGEN; pc_ini; pc_min; pm_ini; pm_min |
| begin gen = 1 generate initial population; // Section 3.3 while gen < maxGEN or tolerance condition is not reached do evaluate the fitness for initial population using LINGO Genetic operation; // Section 3.4, Section 3.5, Section 3.6 and Section 3.7 gen = gen + 1 repeat Genetic operation; // Section 3.4, Section 3.5, Section 3.6 and Section 3.7 end return best known solution end | |
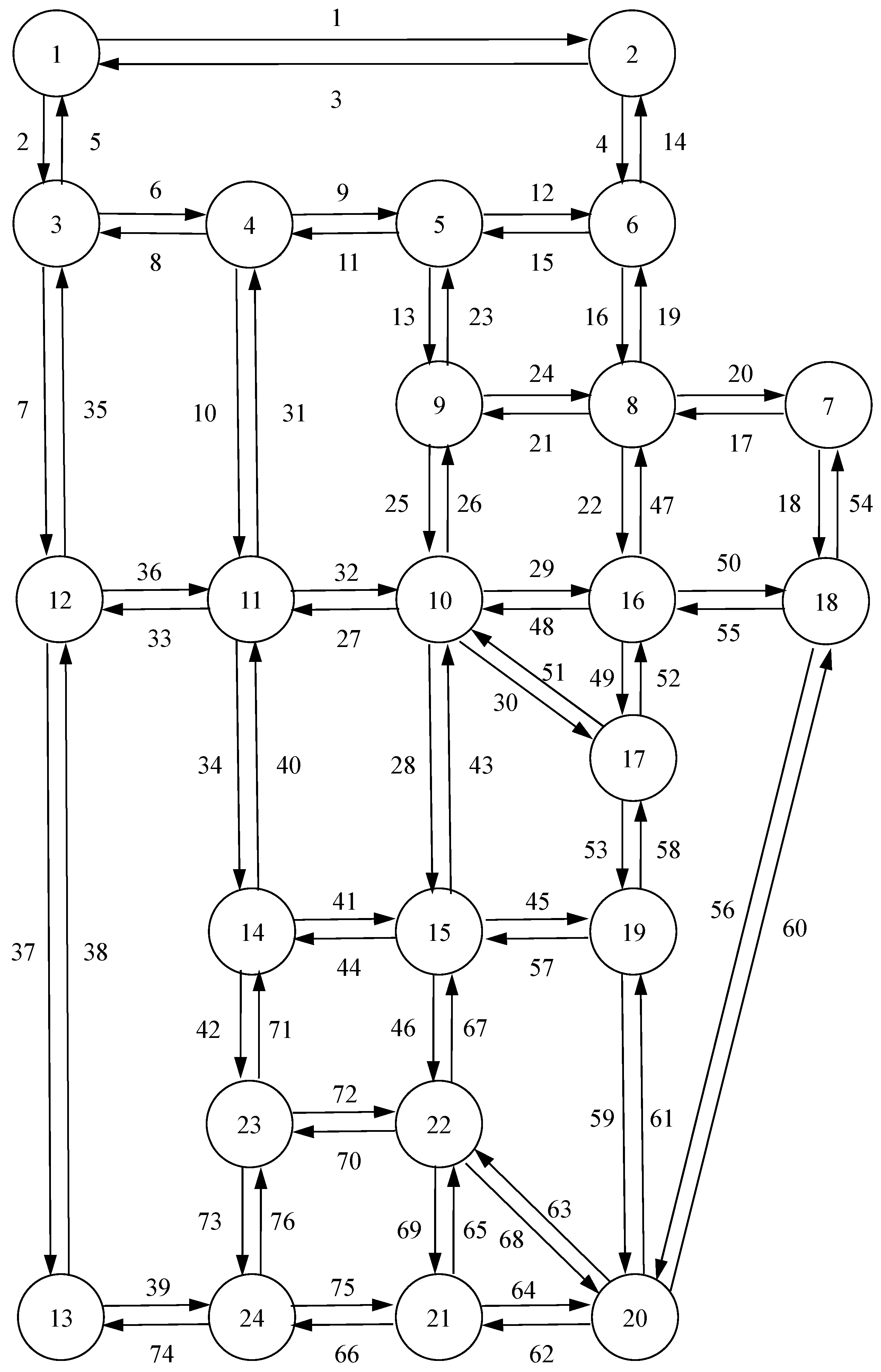
4. Numerical Example
5. Discussion
6. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
| BEGIN | |
| T0 = 2000; | % Initial temperature |
| r = 0.96; | % Control variable reduction factor |
| T_min = 0.001; | % The lower limit of temperature |
| J(Y); | % Fitness function value at stage Y |
| Y(i); | % Current stage |
| Y(i + 1); | % New stage |
| read in network, incident and travel time attributes from input; | |
| set T = T0; | |
| while (T > T_min ) | |
| { | |
| dE = J(Y(i + 1)) − J(Y(i)); | |
| if (dE ≥ 0) | |
| Y(i + 1) = Y(i); | |
| else | |
| { | |
| if (exp(dE/T) > random (0,1)) | |
| Y(i + 1) = Y(i); end | |
| } end | |
| T = r*T; | |
| i++; | |
| } | |
| End |
References
- Farradyne, P.B. Traffic Incident Management Handbook; Prepared for Federal Highway Administration, Office of Travel Management; U.S. Department of Transportation: Washington, DC, USA, 2000.
- Chin, S.M.; Franzese, O.; Greene, D.L.; Hwang, H.L.; Gibson, R.C. Temporary Losses of Highway Capacity and Impacts on Performance: Phase 2; Department of Energy: Washington, DC, USA, 2004. [Google Scholar]
- Zhan, C.; Shen, L.; Hadi, M.; Gan, A. Understanding the characteristics of secondary crashes on freeways. Presented at the 87th Annual Meeting of the Transportation Research Board 2008, Washington, DC, USA, 13–17 January 2008. [Google Scholar]
- Lou, Y.; Yin, Y.; Lawphongpanich, S. Freeway Service Patrol Deployment Planning for Incident Management and Congestion Mitigation. Transp. Res. Part C 2011, 19, 283–295. [Google Scholar] [CrossRef]
- Kaas, K. Benefit of Traffic Incident Management, National Incident Management Coalition (NTIMC). Available online: http://www.transportation.org/sites/ntimc/docs/Benefits11-07-06.pdf (accessed on 8 November 2018).
- Hagen, L.T. Best Practices for Traffic Incident Management in Florida; CUTR Report 2005, No. 21170543; U.S. Department of Transportation: Washington, DC, USA, 2000.
- Yin, Y. A scenario-based model for fleet allocation of freeway service patrols. Netw. Spat. Econ. 2008, 8, 407–417. [Google Scholar] [CrossRef]
- Feno, D.; Ogden, M. Freeway service patrols: A state of the practice. Transp. Res. Rec. J. Transp. Res. Board 1998, 1634, 28–39. [Google Scholar] [CrossRef]
- Ma, Y.; Chowdhury, M.; Fries, R.; Ozbay, K. Harnessing the power of microscopic simulation to evaluate freeway service patrols. J. Transp. Eng. 2009, 135, 427–439. [Google Scholar] [CrossRef]
- Khattak, A.; Rouphail, N.; Monast, K.; Havel, J. Method for priority-ranking and expanding freeway service patrols. Transp. Res. Rec. 2004, 1867, 1–10. [Google Scholar] [CrossRef]
- Wu, W.; Shen, L.; Ji, X.; Jin, W. Analysis of freeway service patrol with discrete event-based simulation. Simul. Model. Pract. Theory 2014, 47, 141–151. [Google Scholar] [CrossRef]
- Yang, S.; Haghani, A.; Iliescu, D. A simulation approach for quantifying the cost-effectiveness of freeway service patrols programs. World Rev. Intermodal Transp. Res. 2007, 1, 387–402. [Google Scholar] [CrossRef]
- Zhao, J.; Guo, Y.; Duan, X. Dynamic path planning of emergency vehicles based on travel time prediction. J. Adv. Transp. 2017, 9184891. [Google Scholar] [CrossRef]
- Erdogan, G. An open source Spreadsheet Solver for Vehicle Routing Problems. Comput. Oper. Res. 2017, 84, 62–72. [Google Scholar] [CrossRef]
- Keskin, B.B.; Li, S.R.; Steil, D.; Spiller, S. Analysis of an integrated maximum covering and patrol routing problem. Transp. Res. Part E Logist. Transp. Rev. 2012, 48, 215–232. [Google Scholar] [CrossRef]
- Chen, X. Fast patrol route planning in dynamic environments. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 894–904. [Google Scholar] [CrossRef]
- Chircop, P.A.; Surendonk, T.J.; van den Briel, M.; Walsh, T. A column generation approach for the scheduling of patrol boats to provide complete patrol coverage. In Proceedings of the 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1–6 December 2013. [Google Scholar]
- Çapar, İ.; Keskin, B.B.; Rubin, P.A. An improved formulation for the maximum coverage patrol routing problem. Comput. Oper. Res. 2015, 59, 1–10. [Google Scholar] [CrossRef]
- Dewil, R.; Vansteenwegen, P.; Cattrysse, D.; Oudheusden, D.V. A minimum cost network flow model for the maximum covering and patrol routing problem. Eur. J. Oper. Res. 2015, 247, 27–36. [Google Scholar] [CrossRef]
- Petty, K.F. Incidents on the Freeway: Detection and Management. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1997. [Google Scholar]
- Yin, Y. Optimal fleet allocation of freeway service patrols. Netw. Spat. Econ. 2006, 6, 221–234. [Google Scholar] [CrossRef]
- Geroliminis, N.; Karlaftis, M.G.; Skabardonis, A. Generalized hypercube queuing model for locating emergency response vehicles in urban transportation networks. In Proceedings of the 85th Annual Meeting Compendium of Papers, Washington, DC, USA, 22–26 January 2006; Transportation Research Board: Washington, DC, USA, 2006. [Google Scholar]
- Ahuja, R.; Magnanti, T.; Orlin, J. Network Flows: Theory, Algorithms, and Applications; The Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Mitchell, M. An Introduction to Genetic Algorithms; MIT Press: Cambridge, MA, USA, 1996; ISBN 9780585030944. [Google Scholar]
- Chipperfield, A.; Fleming, P.; Pohlheim, H.; Fonseca, C. Genetic Algorithm Toolbox for Use with MATLAB; Department of Automatic Control and System Engineering, University of Sheffield: Sheffield, UK, 1994. [Google Scholar]
- Putha, R.; Quadrifoglio, L.; Zechman, E. Comparing ant colony optimization and genetic algorithm approaches for solving traffic signal coordination under oversaturation conditions. Comput. Aided Civ. Infrastruct. Eng. 2012, 27, 14–28. [Google Scholar] [CrossRef]
- Hajibabai, L.; Ouyang, Y. Integrated planning of supply chain networks and multimodal transportation infrastructure expansion: Model development and application to the biofuel industry. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 247–259. [Google Scholar] [CrossRef]
- Chatterjee, S.; Carrera, C.; Lynch, L.A. Genetic algorithms and traveling salesman problems. Eur. J. Oper. Res. 1996, 93, 490–510. [Google Scholar] [CrossRef]
- Zhao, Y.; Xiao, M.Q.; Ge, Y.M.; Feng, D.L.; Zhang, L.; Song, H.F.; Tang, X.L. A double-loop hybrid algorithm for the traveling salesman problem with arbitrary neighbourhoods. Eur. J. Oper. Res. 2018, 265, 65–80. [Google Scholar]
- Arakaki, R.K.; Usberti, F.L. Hybrid genetic algorithm for the open capacitated arc routing problem. Comput. Oper. Res. 2018, 90, 221–231. [Google Scholar] [CrossRef]
- Baker, E.J. Reducing bias and inefficiency in the selection algorithm. In Proceedings of the Second International Conference on Genetic Algorithms, Cambridge, MA, USA, 28–31 July 1987; pp. 14–21. [Google Scholar]
- Sun, X.; Wang, J. Routing design and fleet allocation optimization of freeway service patrol: Improved results using genetic algorithm. Phys. A Stat. Mech. Appl. 2018, 501, 205–216. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Travel Time (min) | Incidents (mean) | Segment | Travel Time (min) | Incidents (mean) |
|---|---|---|---|---|---|
| 1 | 9 | 10 | 39 | 5 | 4 |
| 2 | 6 | 8 | 40 | 6 | 2 |
| 3 | 9 | 10 | 41 | 7.5 | 4 |
| 4 | 7.5 | 10 | 42 | 6 | 3 |
| 5 | 6 | 8 | 43 | 9 | 8 |
| 6 | 6 | 9 | 44 | 7.5 | 4 |
| 7 | 6 | 6 | 45 | 6 | 3 |
| 8 | 6 | 8 | 46 | 6 | 10 |
| 9 | 3 | 2 | 47 | 3 | 3 |
| 10 | 9 | 7 | 48 | 7.5 | 4 |
| 11 | 3 | 2 | 49 | 3 | 9 |
| 12 | 6 | 4 | 50 | 4.5 | 3 |
| 13 | 3 | 10 | 51 | 10 | 4 |
| 14 | 7.5 | 9 | 52 | 3 | 8 |
| 15 | 6 | 4 | 53 | 3 | 7 |
| 16 | 3 | 9 | 54 | 3 | 1 |
| 17 | 4.5 | 10 | 55 | 4.5 | 3 |
| 18 | 3 | 2 | 56 | 12 | 3 |
| 19 | 3 | 9 | 57 | 6 | 3 |
| 20 | 4.5 | 9 | 58 | 3 | 7 |
| 21 | 5 | 2 | 59 | 4 | 4 |
| 22 | 3 | 3 | 60 | 12 | 3 |
| 23 | 3 | 9 | 61 | 4 | 4 |
| 24 | 5 | 1 | 62 | 5 | 4 |
| 25 | 4.5 | 5 | 63 | 7.5 | 5 |
| 26 | 4.5 | 5 | 64 | 5 | 3 |
| 27 | 7.5 | 2 | 65 | 3 | 10 |
| 28 | 9 | 9 | 66 | 4.5 | 2 |
| 29 | 7.5 | 4 | 67 | 6 | 9 |
| 30 | 10 | 4 | 68 | 7.5 | 5 |
| 31 | 9 | 7 | 69 | 3 | 10 |
| 32 | 7.5 | 2 | 70 | 6 | 9 |
| 33 | 9 | 4 | 71 | 6 | 3 |
| 34 | 6 | 3 | 72 | 6 | 9 |
| 35 | 6 | 6 | 73 | 3 | 4 |
| 36 | 9 | 3 | 74 | 5 | 3 |
| 37 | 12.5 | 8 | 75 | 4.5 | 2 |
| 38 | 12.5 | 7 | 76 | 3 | 3 |
| Total | 452 | 415 |
| Route | Overlapping Patrol | |
|---|---|---|
| Segment Covered | Number of Patrol Vehicles | |
| 1 | 27, 34, 40, 31, 9, 13, 25, 28, 46, 69, 66, 75, 65, 68, 61, 57, 43, 26, 23, 11, 8, 6, 9, 13, 25 | 1 |
| 2 | 72, 70, 73, 76, 71, 41, 45, 58, 52, 47, 19, 14, 4, 15, 11, 10, 31, 9, 13, 24, 22, 48, 29, 49, 53, 58, 53, 59, 62, 66, 74, 39, 76 | 2 |
| 3 | 14, 4, 15, 11, 10, 34, 42, 73, 75, 65, 67, 43, 26, 23, 11, 9, 13, 25, 28, 46, 69, 64, 61, 58, 52, 47, 19 | 1 |
| 4 | 60, 47, 21, 23, 11, 8, 7, 37, 39, 75, 65, 67, 43, 26, 24, 19, 14, 3, 1, 4, 16, 20, 18, 55, 49, 53, 57, 44, 41, 46, 69, 66, 76, 71, 40 | 4 |
| 5 | 38, 36, 32, 30, 52, 49, 53, 57, 45, 49, 59, 62, 66, 74 | 1 |
| 6 | 5, 2, 7, 35, 6, 9, 12, 16, 22, 50, 56, 62, 64, 61, 58, 52, 47, 19, 15, 13, 25, 28, 44, 40, 31, 8 | 2 |
| 7 | 53, 59, 61, 58, 51, 26, 24, 20, 17, 19, 16, 21, 25, 30, 51, 27, 33, 35, 7, 36, 34, 42, 73, 76, 73, 75, 64, 61, 58 | 1 |
| 8 | 21, 25, 27, 34, 42, 73, 74, 38, 35, 5, 1, 3, 2, 7, 37, 39, 76, 71, 40, 33, 35, 6, 9, 13, 24 | 3 |
| 9 | 32, 26, 25, 29, 50, 54, 17, 19, 14, 3, 2, 6, 10 | 1 |
| 10 | 23, 12, 16, 20, 18, 54, 17, 22, 48, 28, 45, 59, 63, 69, 65, 70, 72, 67, 46, 68, 61, 58, 52, 50, 55, 49, 51, 26 | 4 |
| Response time | 4621.11 | |
| Route | GA | SA Algorithm | ||
|---|---|---|---|---|
| Segment Covered | Number of Patrol Vehicles | Segment Covered | Number of Patrol Vehicles | |
| 1 | 1, 4, 15, 12, 14, 3, 2, 6, 8, 7, 35, 5 | 4 | 1, 5, 6 | 2 |
| 2 | 9, 11, 10, 31 | 1 | 2, 3, 7 | 2 |
| 3 | 13, 25, 26, 23 | 1 | 4, 8 | 1 |
| 4 | 16, 20, 17, 19 | 1 | 9, 10, 22, 30, 34 | 3 |
| 5 | 18, 55, 47, 21, 24, 22, 48, 30, 51, 27, 33, 36, 34, 42, 71, 41, 45, 57, 44, 40, 32, 29, 50, 56, 62, 64, 60, 54 | 6 | 11, 14 | 1 |
| 6 | 37, 39, 75, 66, 76, 73, 74, 38 | 2 | 12, 13, 19 | 1 |
| 7 | 28, 43 | 1 | 15, 26 | 1 |
| 8 | 49, 53, 58, 52 | 1 | 16, 17, 21, 27, 28, 29 | 3 |
| 9 | 46, 69, 65, 70, 72, 67 | 2 | 18, 25 | 1 |
| 10 | 59, 63, 68, 61 | 1 | 20, 36, 37, 38 | 2 |
| 11 | -- | -- | 23, 24 | 1 |
| 12 | -- | -- | 31, 35 | 1 |
| 13 | -- | -- | 32, 33 | 1 |
| Response time | 4301.17 | 4319.75 | ||
| Route | Segment Covered | Number of Patrol Vehicles |
|---|---|---|
| 1 | 1, 4, 15, 13, 25, 28, 43, 26, 23, 12, 14, 3 | 4 |
| 2 | 2, 7, 35, 6, 8, 5 | 2 |
| 3 | 9, 11, 10, 31 | 1 |
| 4 | 13, 24, 22, 50, 54, 18, 56, 60, 55, 47, 21, 23 | 2 |
| 5 | 16, 20, 17, 19 | 1 |
| 6 | 27, 33, 36, 34, 42, 71, 41, 45, 57, 44, 40, 32, 29, 48, 30, 51 | 4 |
| 7 | 37, 39, 75, 65, 69, 64, 62, 66, 74, 38 | 2 |
| 8 | 49, 53, 58, 52 | 1 |
| 9 | 46, 69, 65, 67 | 1 |
| 10 | 59, 63, 68, 61 | 1 |
| 11 | 70, 73, 76, 72 | 1 |
| Response time | 4269.00 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Wang, J.; Wu, W.; Liu, W. Genetic Algorithm for Optimizing Routing Design and Fleet Allocation of Freeway Service Overlapping Patrol. Sustainability 2018, 10, 4120. https://doi.org/10.3390/su10114120
Sun X, Wang J, Wu W, Liu W. Genetic Algorithm for Optimizing Routing Design and Fleet Allocation of Freeway Service Overlapping Patrol. Sustainability. 2018; 10(11):4120. https://doi.org/10.3390/su10114120
Chicago/Turabian StyleSun, Xiuqiao, Jian Wang, Weitiao Wu, and Wenjia Liu. 2018. "Genetic Algorithm for Optimizing Routing Design and Fleet Allocation of Freeway Service Overlapping Patrol" Sustainability 10, no. 11: 4120. https://doi.org/10.3390/su10114120
APA StyleSun, X., Wang, J., Wu, W., & Liu, W. (2018). Genetic Algorithm for Optimizing Routing Design and Fleet Allocation of Freeway Service Overlapping Patrol. Sustainability, 10(11), 4120. https://doi.org/10.3390/su10114120