
A Proactive Collision Avoidance Model for Connected and Autonomous Vehicles in Mixed Traffic Flow



Abstract
1. Introduction
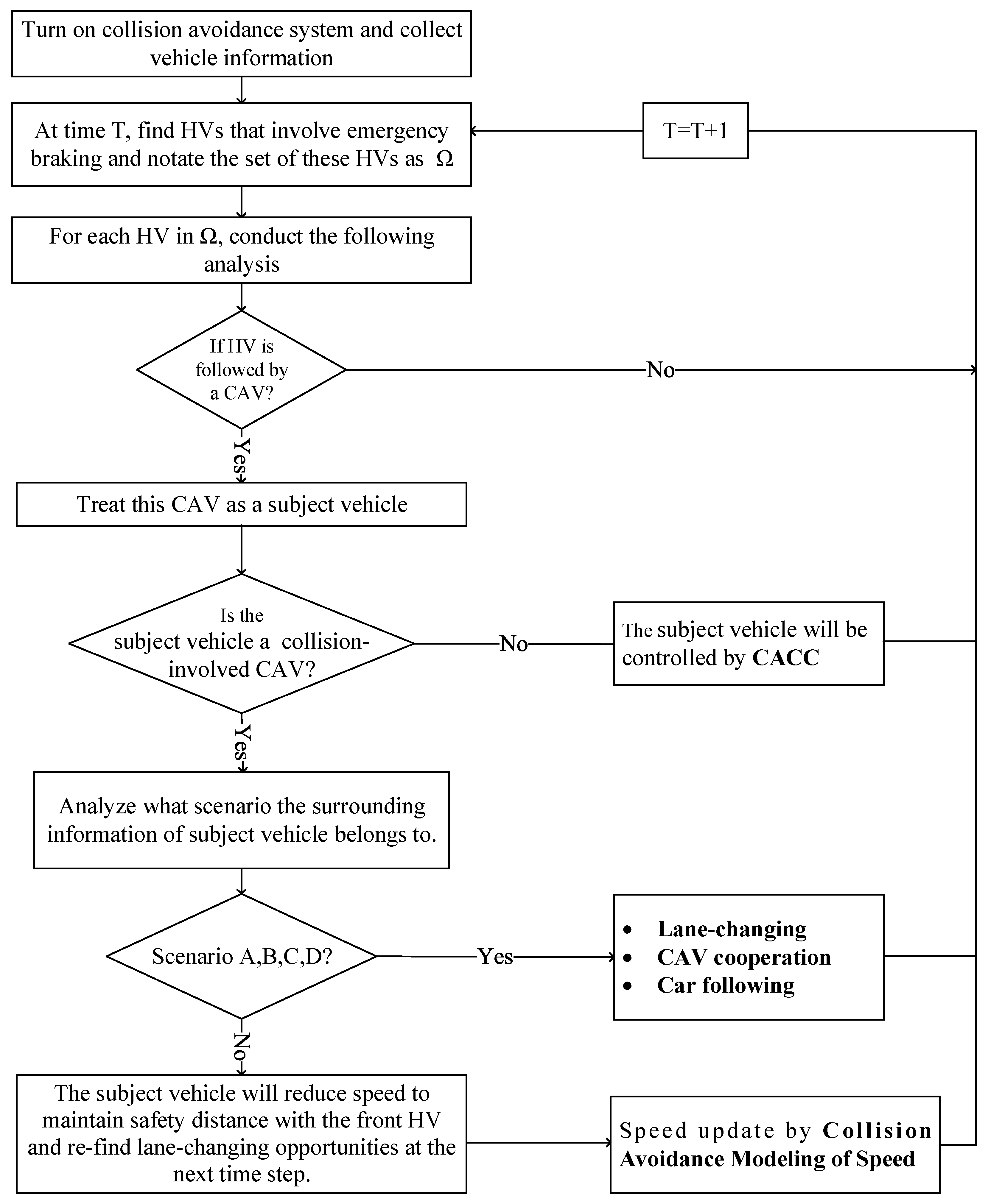
2. Methodology
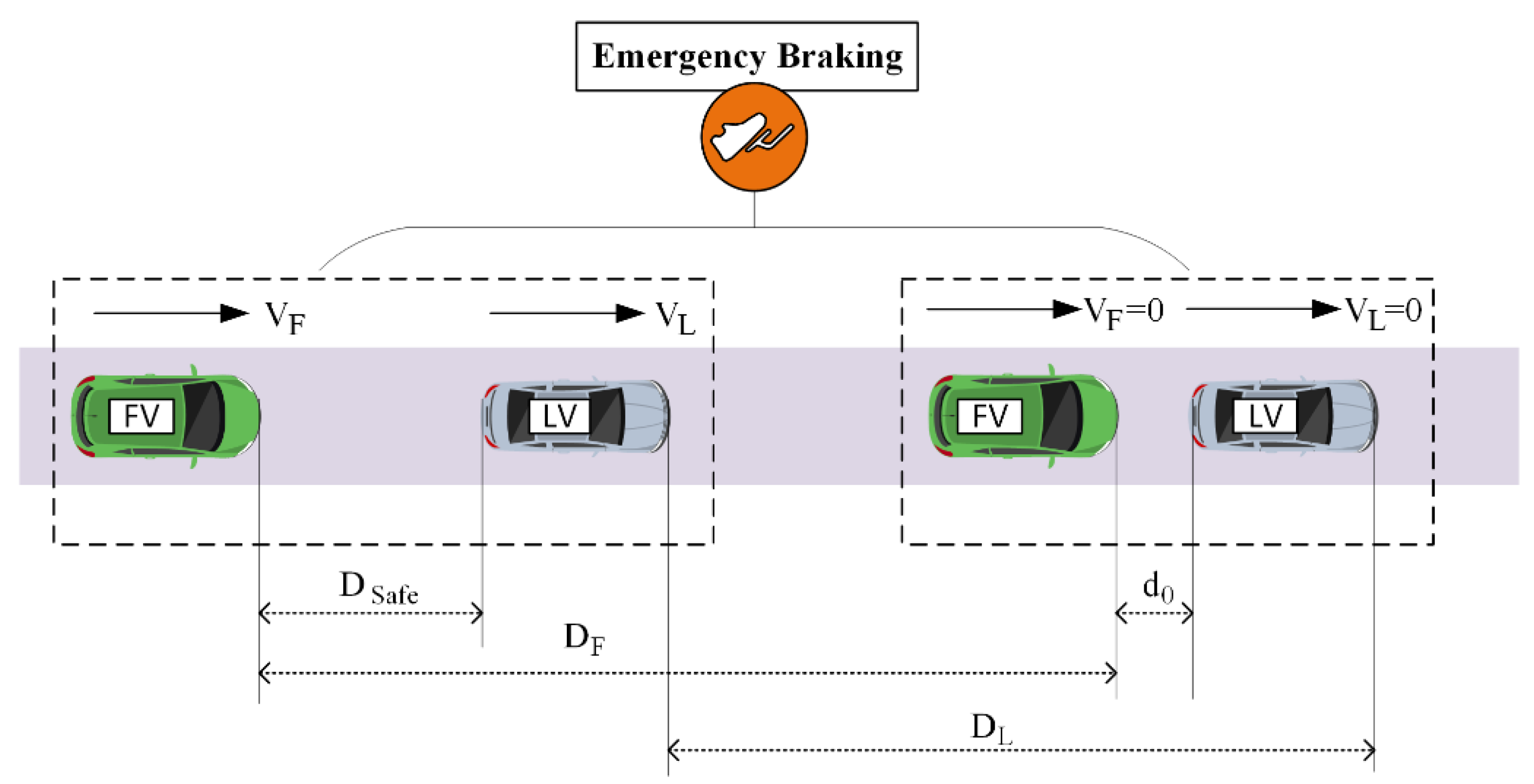
2.1. Safety Distance
2.2. Collision Avoidance Modeling of Speed
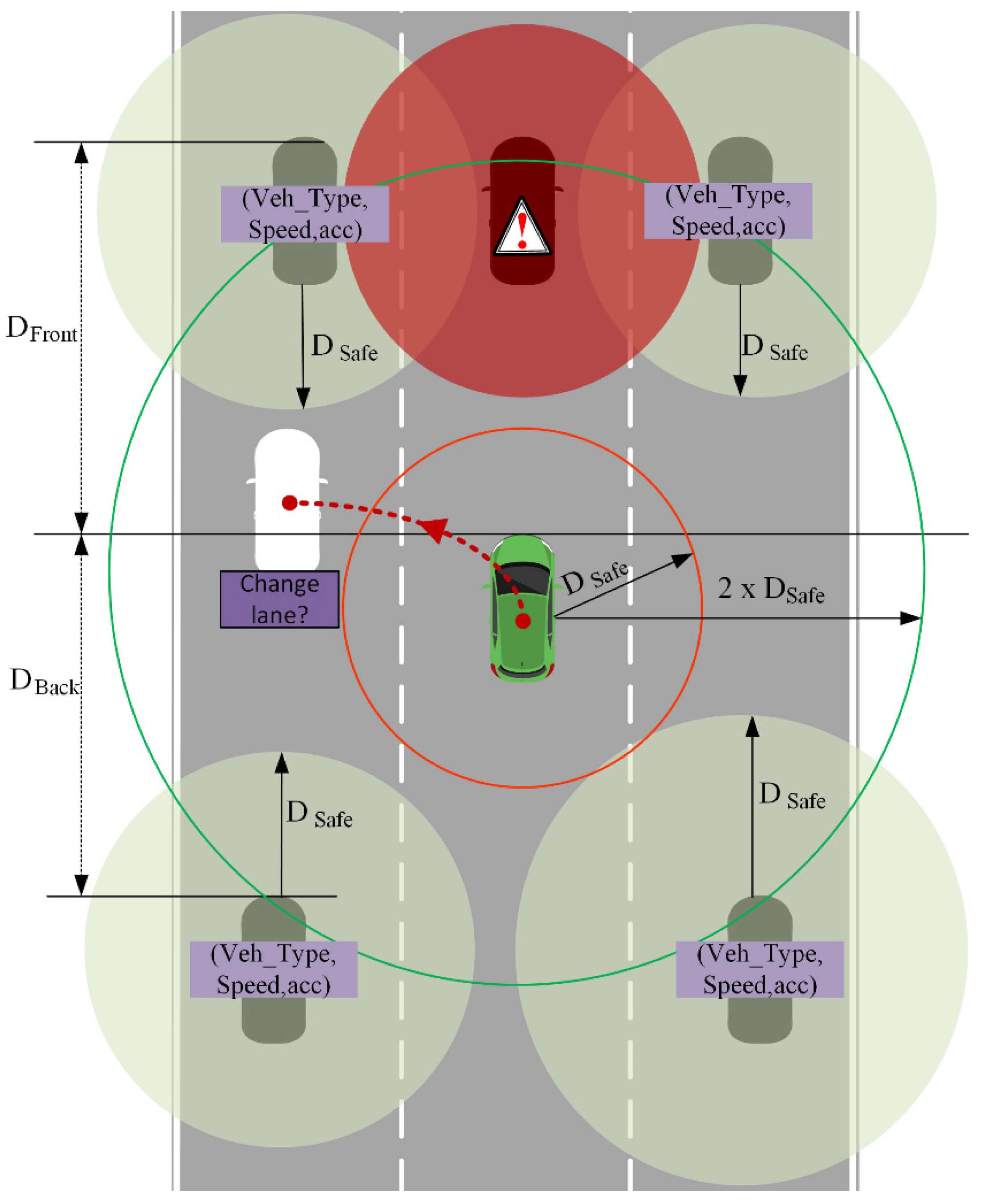
2.3. Collision Avoidance Modeling of Lane-Changing
3. Experiments
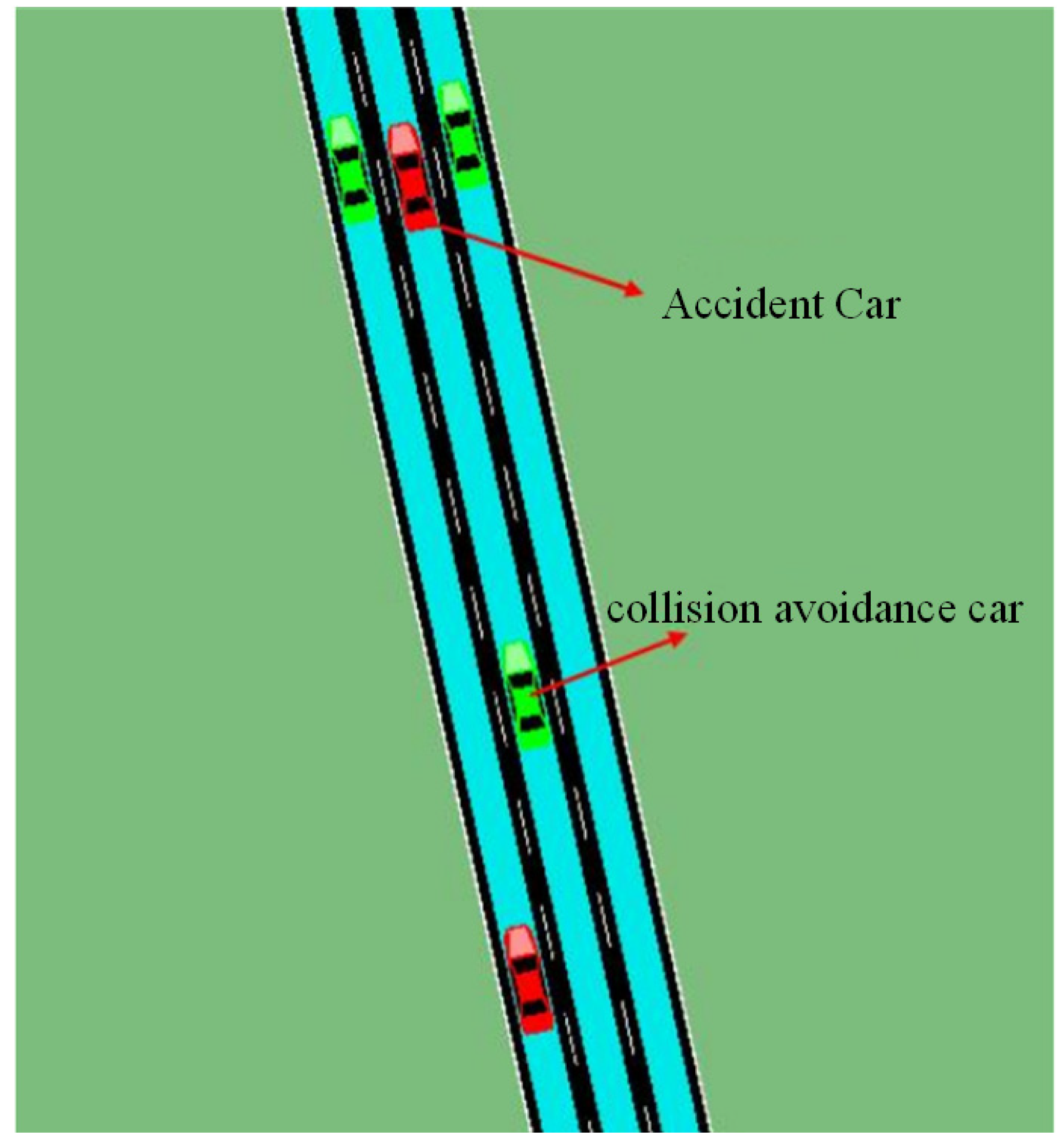
3.1. Simulation Environment
3.1.1. Introduction to SUMO
3.1.2. Wiedemann 99 Model
3.1.3. Cooperative Adaptive Cruise Control (CACC)
3.1.4. Model Parameter Values and Simulation Settings
4. Simulation Results and Discussion
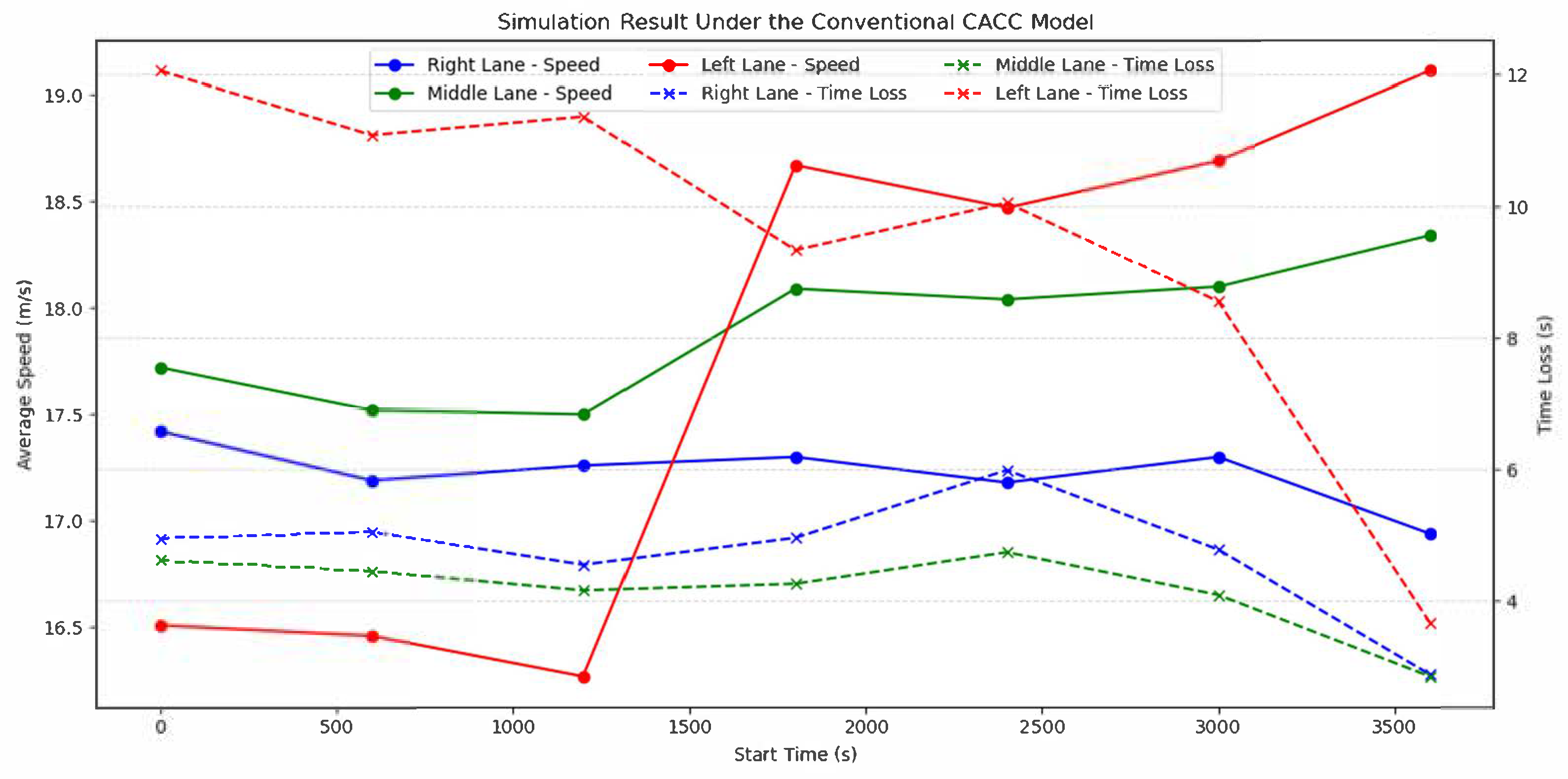
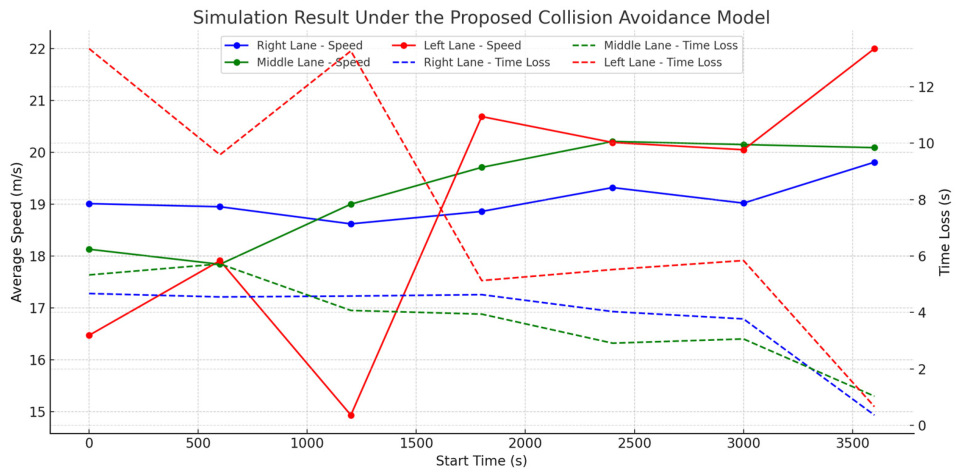
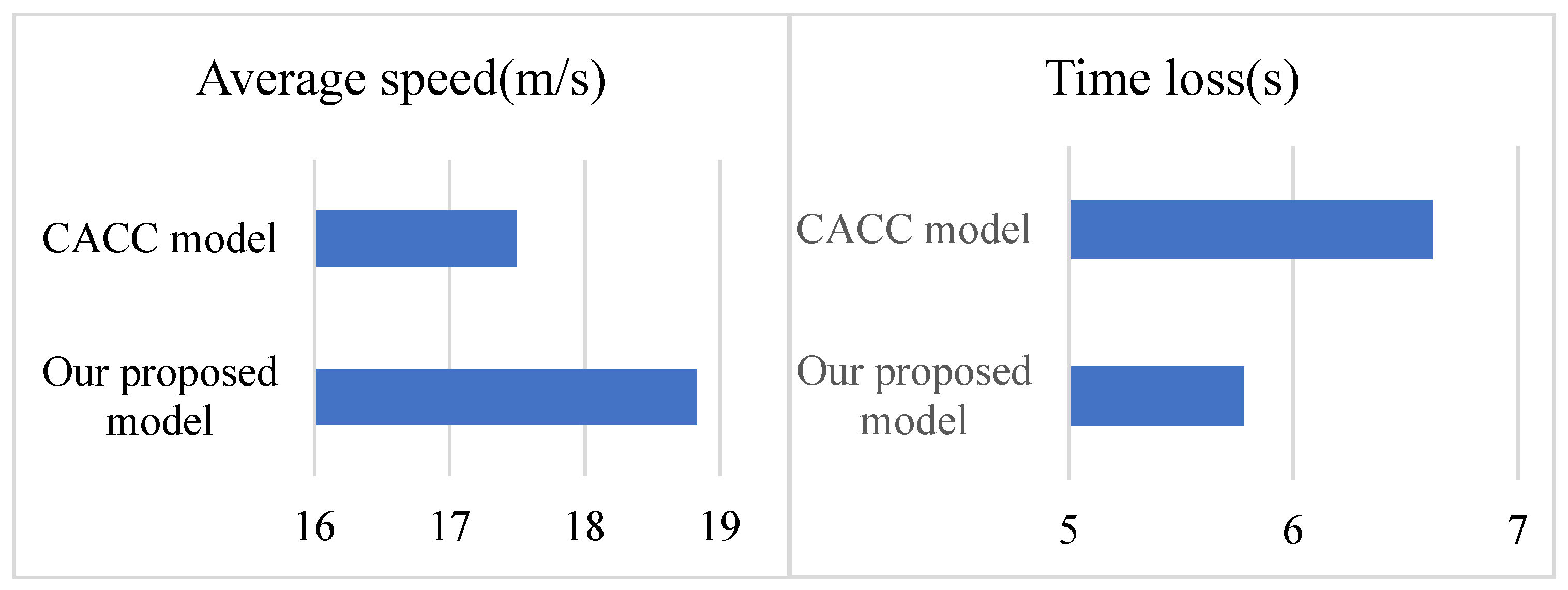
4.1. Evaluation of Traffic Efficiency
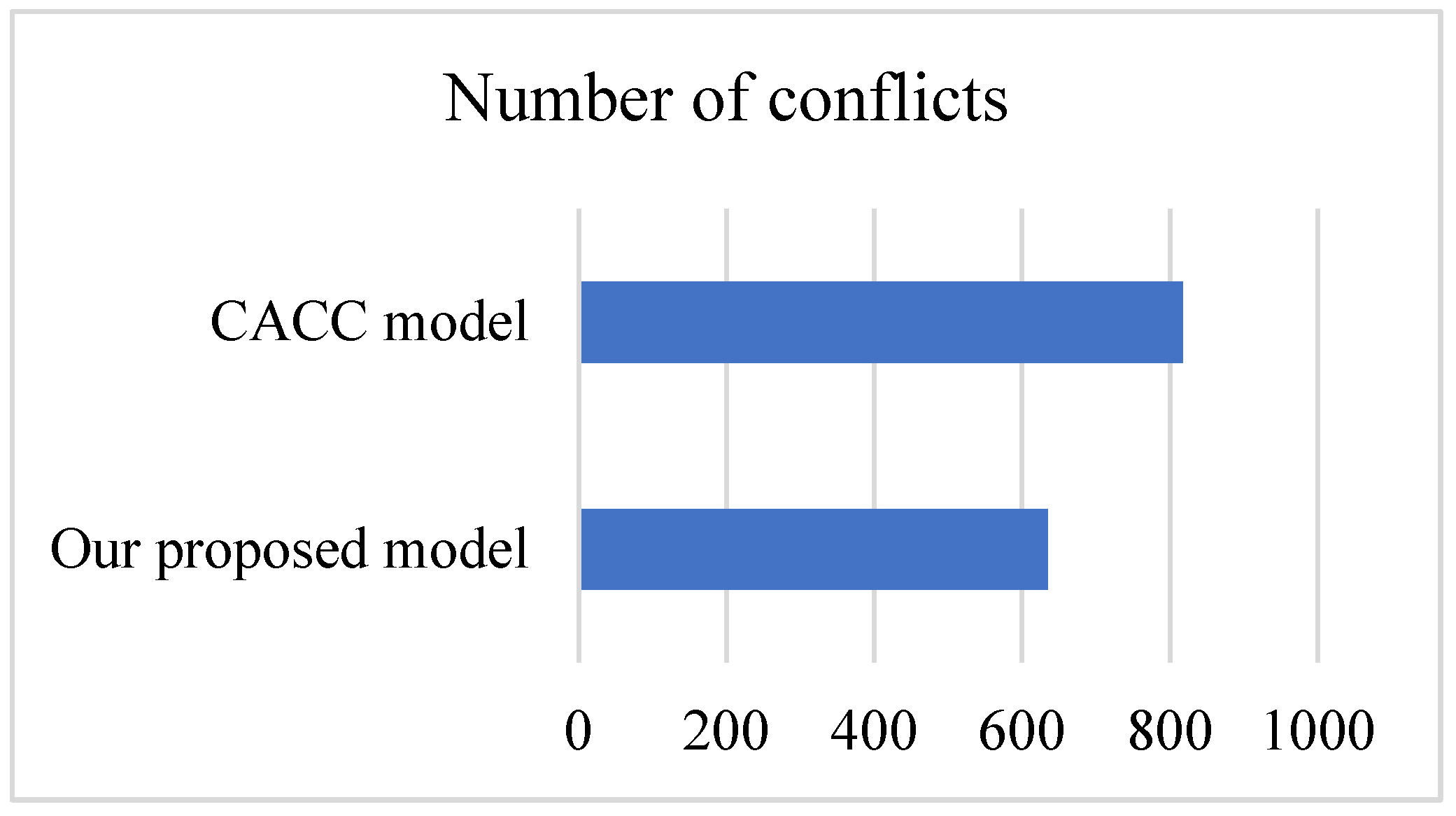
4.2. Evaluation of Traffic Safety
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lv, P.; Han, J.; Nie, J.; Zhang, Y.; Xu, J.; Cai, C.; Chen, Z. Cooperative decision-making of connected and autonomous vehicles in an emergency. IEEE Trans. Veh. Technol. 2022, 72, 1464–1477. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wang, Z.; Jiang, R.; Zhu, F.; Yan, R.; Shang, Y. A multi-agent reinforcement learning-based longitudinal and lateral control of CAVs to improve traffic efficiency in a mandatory lane change scenario. Transp. Res. Part C Emerg. Technol. 2024, 158, 104445. [Google Scholar] [CrossRef]
- Sheikh, M.S.; Peng, Y. A collision avoidance model for on-ramp merging of autonomous vehicles. KSCE J. Civ. Eng. 2023, 27, 1323–1339. [Google Scholar] [CrossRef]
- Zhou, J.; Zhu, F. Analytical analysis of the effect of maximum platoon size of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2021, 122, 102882. [Google Scholar] [CrossRef]
- Hu, X.; Sun, J. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area. Transp. Res. Part C Emerg. Technol. 2019, 101, 111–125. [Google Scholar] [CrossRef]
- Wu, B.; Qian, L.; Lu, M.; Qiu, D.; Liang, H. Optimal control problem of multi-vehicle cooperative autonomous parking trajectory planning in a connected vehicle environment. IET Intell. Transp. Syst. 2019, 13, 1677–1685. [Google Scholar] [CrossRef]
- Zheng, Y.; Yao, Z.; Xu, Y.; Qu, X.; Ran, B. Lane management for mixed traffic flow on roadways considering the car-following behaviors of human-driven vehicles to follow connected and automated vehicles. Phys. A Stat. Mech. Its Appl. 2024, 635, 129503. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, H. Cell transmission model for mixed traffic flow with connected and autonomous vehicles. J. Transp. Eng. Part A Syst. 2019, 145, 04019014. [Google Scholar] [CrossRef]
- Rahman, M.S.; Abdel-Aty, M.; Lee, J.; Rahman, M.H. Safety benefits of arterials’ crash risk under connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 100, 354–371. [Google Scholar] [CrossRef]
- Silgu, M.A.; Erdağı, İ.G.; Göksu, G.; Celikoglu, H.B. Combined control of freeway traffic involving cooperative adaptive cruise controlled and human driven vehicles using feedback control through SUMO. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11011–11025. [Google Scholar] [CrossRef]
- Li, Y.; Pan, B.; Xing, L.; Yang, M.; Dai, J. Developing dynamic speed limit strategies for mixed traffic flow to reduce collision risks at freeway bottlenecks. Accid. Anal. Prev. 2022, 175, 106781. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Ma, M.; Liang, S.; Yang, J.; Wang, Y. Robust lane change decision for autonomous vehicles in mixed traffic: A safety-aware multi-agent adversarial reinforcement learning approach. Transp. Res. Part C Emerg. Technol. 2025, 172, 105005. [Google Scholar] [CrossRef]
- Khattak, Z.H.; Smith, B.L.; Fontaine, M.D.; Ma, J.; Khattak, A.J. Active lane management and control using connected and automated vehicles in a mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2022, 139, 103648. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Wang, B.; Li, M. Collision avoidance motion planning for connected and automated vehicle platoon merging and splitting with a hybrid automaton architecture. IEEE Trans. Intell. Transp. Syst. 2023, 25, 1445–1464. [Google Scholar] [CrossRef]
- Muzahid, A.J.M.; Kamarulzaman, S.F.; Rahman, M.A.; Murad, S.A.; Kamal, M.A.S.; Alenezi, A.H. Multiple vehicle cooperation and collision avoidance in automated vehicles: Survey and an AI-enabled conceptual framework. Sci. Rep. 2023, 13, 603. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Liu, Q.; Fu, J.; Liufu, K.; Li, Q. Collision-avoidance lane change control method for enhancing safety for connected vehicle platoon in mixed traffic environment. Accid. Anal. Prev. 2023, 184, 106999. [Google Scholar] [CrossRef] [PubMed]
- Du, R.; Chen, S.; Li, Y.; Ha, P.Y.J.; Dong, J.; Anastasopoulos, P.C.; Labi, S. A cooperative crash avoidance framework for autonomous vehicle under collision-imminent situations in mixed traffic stream. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: New York, NY, USA, 2021; pp. 1997–2002. [Google Scholar]
- Chen, Y.; Dong, C.; Lyu, K.; Shi, X.; Han, G.; Wang, H. A review of car-following and lane-changing models under heterogeneous environments. Phys. A Stat. Mech. Its Appl. 2024, 654, 130127. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- Porfyri, K.N.; Mintsis, E.; Mitsakis, E. Assessment of ACC and CACC systems using SUMO. EPiC Ser. Eng. 2018, 2, 82–93. [Google Scholar]
- Hayward, J. Near Misses as a Measure of Safety at Urban Intersections. Ph.D. Thesis, Department of Civil Engineering, The Pennsylvania State University, University Park, State College, PA, USA, 1971. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accident Vehicle ID | Accident Start Time (s) | Accident End Time (s) |
| Veh1 | 40 | 320 |
| Veh2 | 813 | 860 |
| Veh3 | 1642 | 1652 |
| Veh4 | 1765 | 1829 |
| Veh5 | 2004 | 2084 |
| Veh6 | 2488 | 2543 |
| Veh7 | 2527 | 2562 |
| Veh8 | 3017 | 3085 |
| Veh9 | 3426 | 3475 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, G.; Li, K.; Lu, W.; Chen, O.; Sun, C.; Zhao, Y. A Proactive Collision Avoidance Model for Connected and Autonomous Vehicles in Mixed Traffic Flow. World Electr. Veh. J. 2025, 16, 394. https://doi.org/10.3390/wevj16070394
Hu G, Li K, Lu W, Chen O, Sun C, Zhao Y. A Proactive Collision Avoidance Model for Connected and Autonomous Vehicles in Mixed Traffic Flow. World Electric Vehicle Journal. 2025; 16(7):394. https://doi.org/10.3390/wevj16070394
Chicago/Turabian StyleHu, Guojing, Kun Li, Weike Lu, Ouchan Chen, Chuan Sun, and Yuanqi Zhao. 2025. "A Proactive Collision Avoidance Model for Connected and Autonomous Vehicles in Mixed Traffic Flow" World Electric Vehicle Journal 16, no. 7: 394. https://doi.org/10.3390/wevj16070394
APA StyleHu, G., Li, K., Lu, W., Chen, O., Sun, C., & Zhao, Y. (2025). A Proactive Collision Avoidance Model for Connected and Autonomous Vehicles in Mixed Traffic Flow. World Electric Vehicle Journal, 16(7), 394. https://doi.org/10.3390/wevj16070394