
Autonomous Parking Path Planning Method for Intelligent Vehicles Based on Improved RRT Algorithm



Abstract
1. Introduction
2. Environmental Modeling and Vehicle Kinematics Modeling
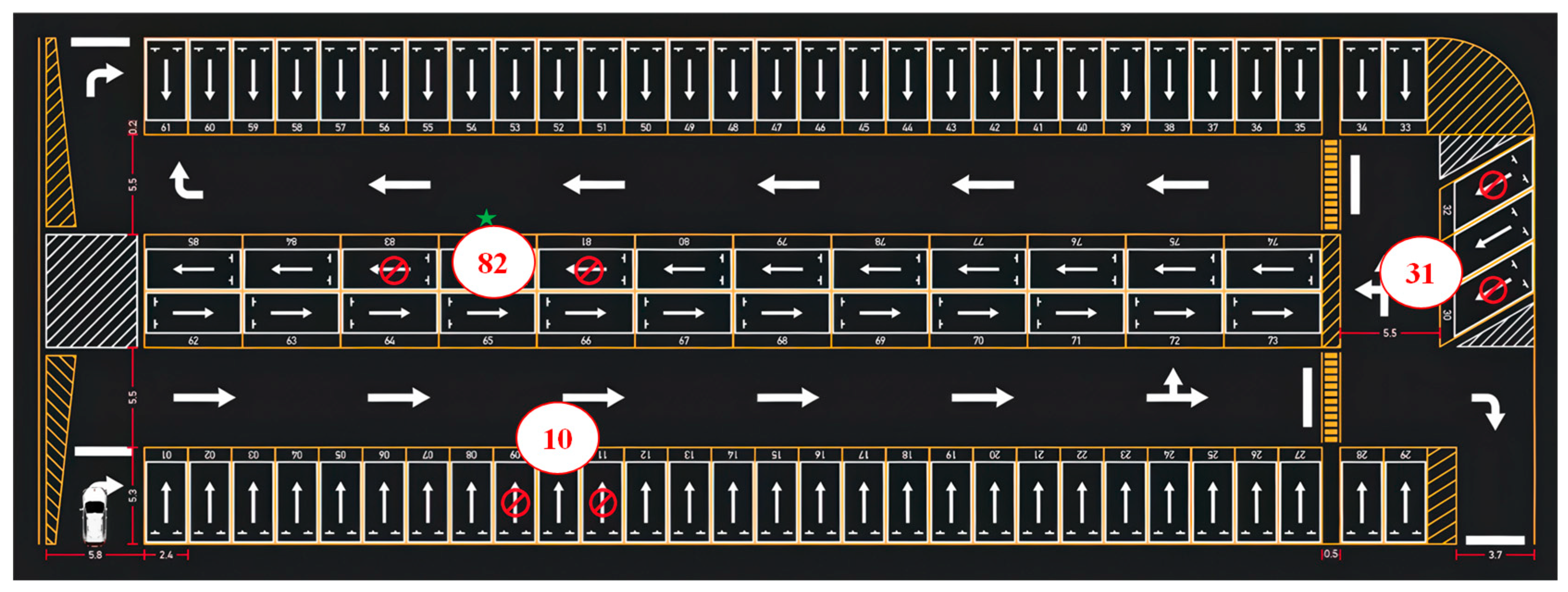
2.1. Environmental Modeling
- A square grid is selected, with each grid cell having a side length of 0.1 m.
- In cases where obstacles with curved boundaries do not fully occupy a grid cell, the obstacles are expanded outward by one grid cell to ensure comprehensive coverage and accurate representation. This expansion is illustrated in Figure 1.
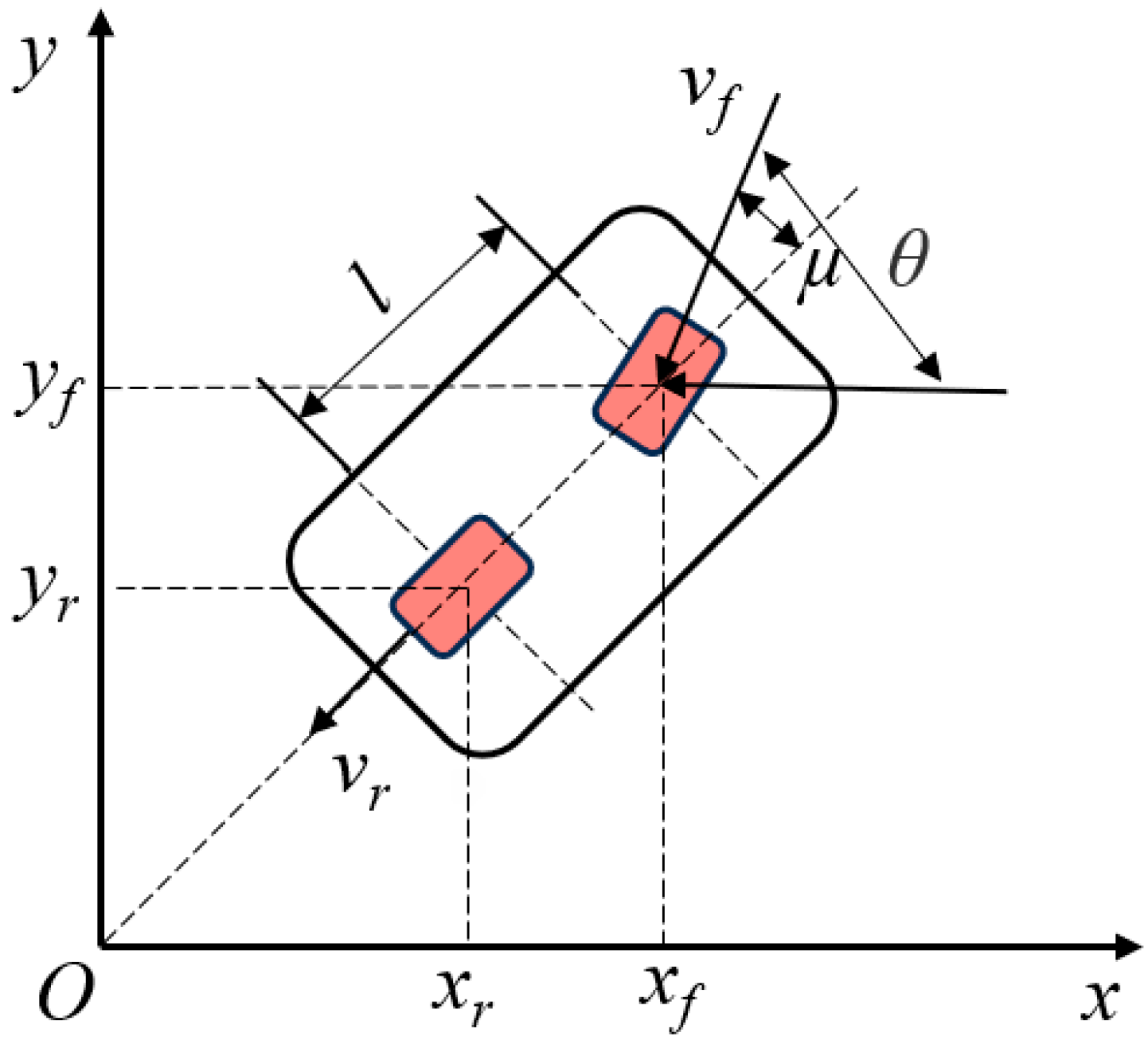
2.2. Vehicle Kinematics Modelling
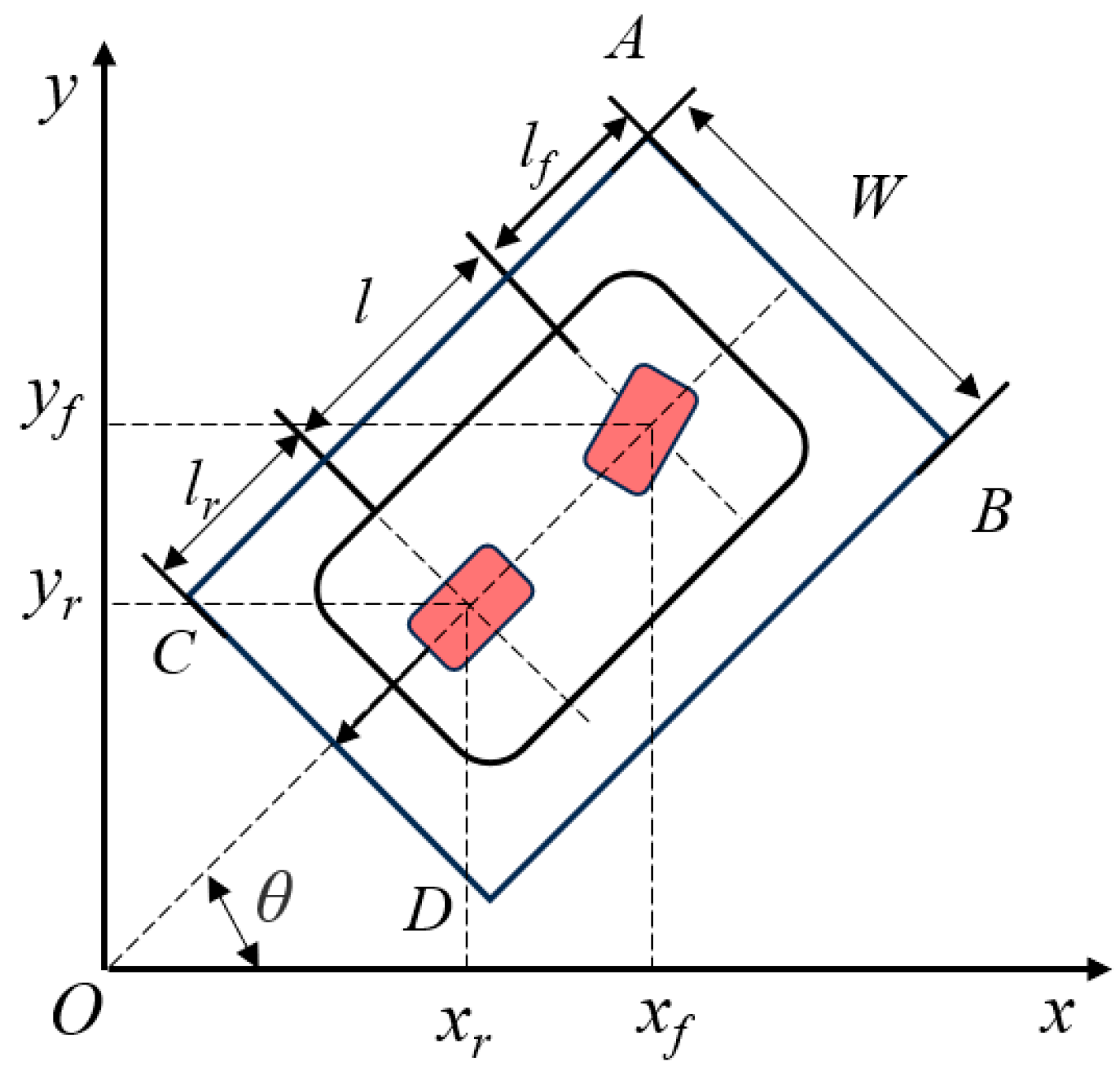
2.3. Parking Obstacle Avoidance Constraints
3. Vehicle Path Planning
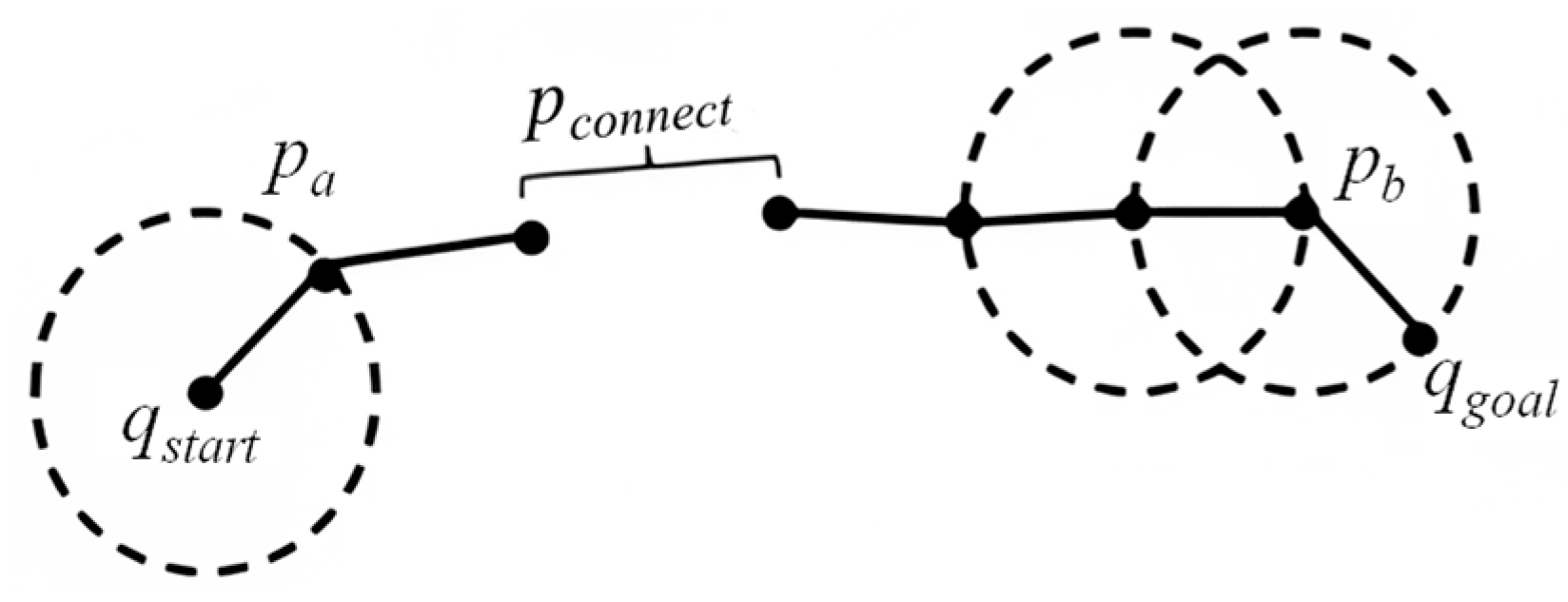
3.1. PSBi-RRT Algorithm
| Algorithm 1 PSBi-RRT |
|
Input: Ta.V, Ta.E, Tb.V, Tb.E,Ta.V1 = Qstart, Tb.V1 = Qgoal Output: Tree ← Ta ∪ Tb |
| 1: initialize Tree = (V ← ,Qgoal; E ← ∅; map; ρ; N; I ← 0); |
| 2: While i ≤ N do |
| 3: Xf← Ellipticalization of samplingrange (X); |
| 4: Qrand ← Dual-target bias strategy (Xf;Tree); |
| 5:Qnear← Heuristic search nearby points (Tree,Qrana); |
| 6: Qnew← Extension new nodes (Qnear,Qrand,ρ); |
| 7: Qnew* ← Node correction (Qnew,Qnear); |
| 8: if ObstacleFree (Ta.Qnear, Ta.Qnew) then |
| 9: Ta.V1 = Ta.V1 ∪ Ta. Qnew*; |
| 10: Ta.E1 = Ta.E1 ∪ (Ta. Qnear, Ta. Qnew*); |
| 11: end if |
| 12: if ObstacleFree (Tb.Qnear, Tb.Qnew) then |
| 13: Tb.V1 = Tb.V1 ∪ Tb. Qnew*; |
| 14: Tb.E1 = Tb.E1 ∪ (Tb. Qnear,Tb. Qnew*); |
| 15: end if |
| 16: if Ta. Qnew*= = Tb. Qnew* then |
| 17: Path = FillPath (TaTb); |
| 18: else if Ta. Qnew*! = Tb. Qnew* then |
| 19: DirectConnection (Ta, Tb); |
| 20: Swap (Ta, Tb); |
| 21: end if |
| 22: Tree ← θ-cutmechanism (Ta ∪ Tb, Xf) |
| 23: end while |
3.2. Planning Models for B-Spline Curves
- All points (x(u), y(u)) on the B-spline curve have distances from all obstacles greater than or equal to the obstacle radius rj, i.e.,
- 2.
- The start and end points of the B-spline curve are P1 and Pn, i.e.,
- 3.
- The first-order derivative of the B-spline curve is continuous, i.e.,
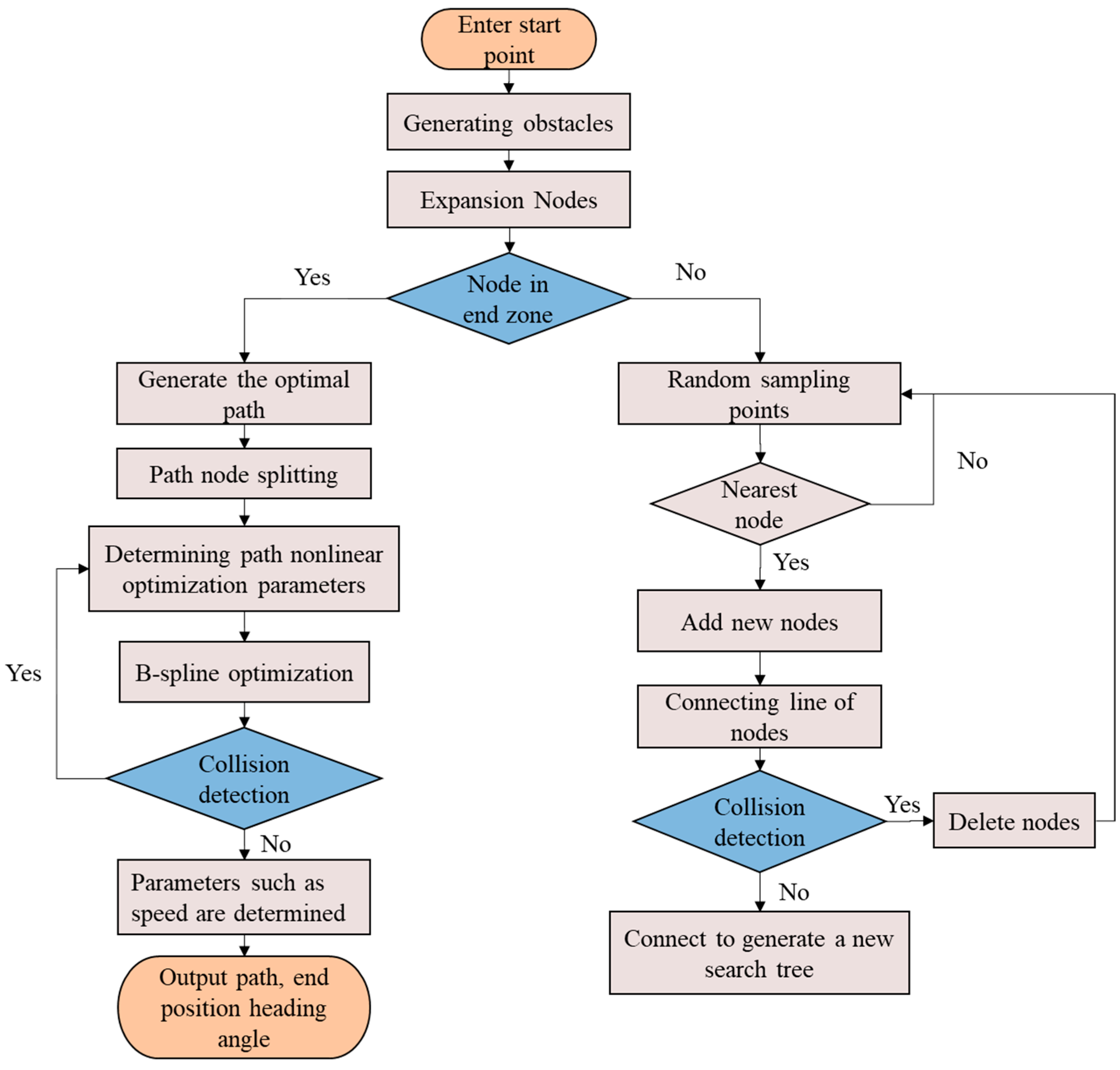
4. PSBi-RRT Algorithm Path Planning Implementation
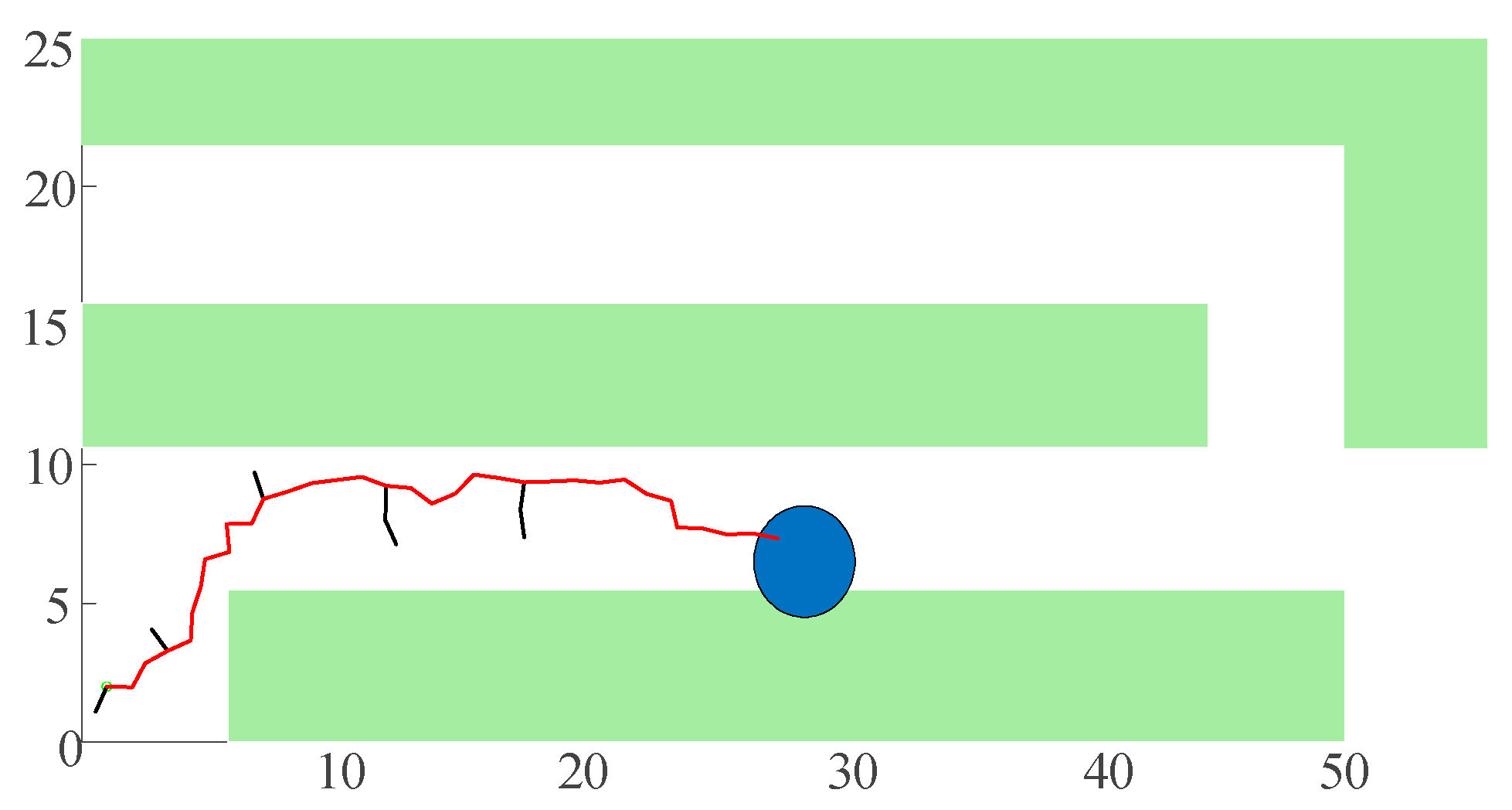
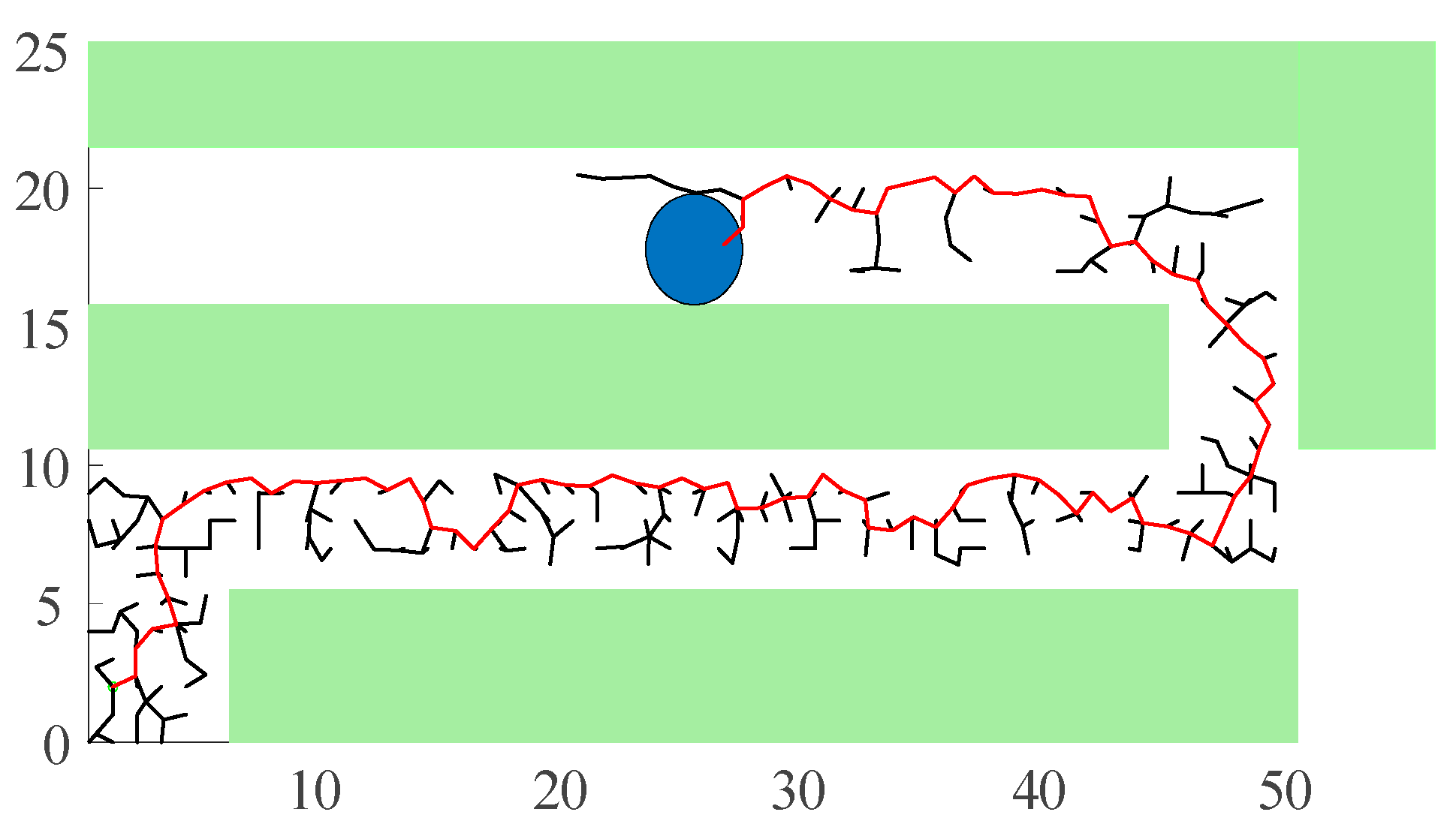
4.1. Path Planning
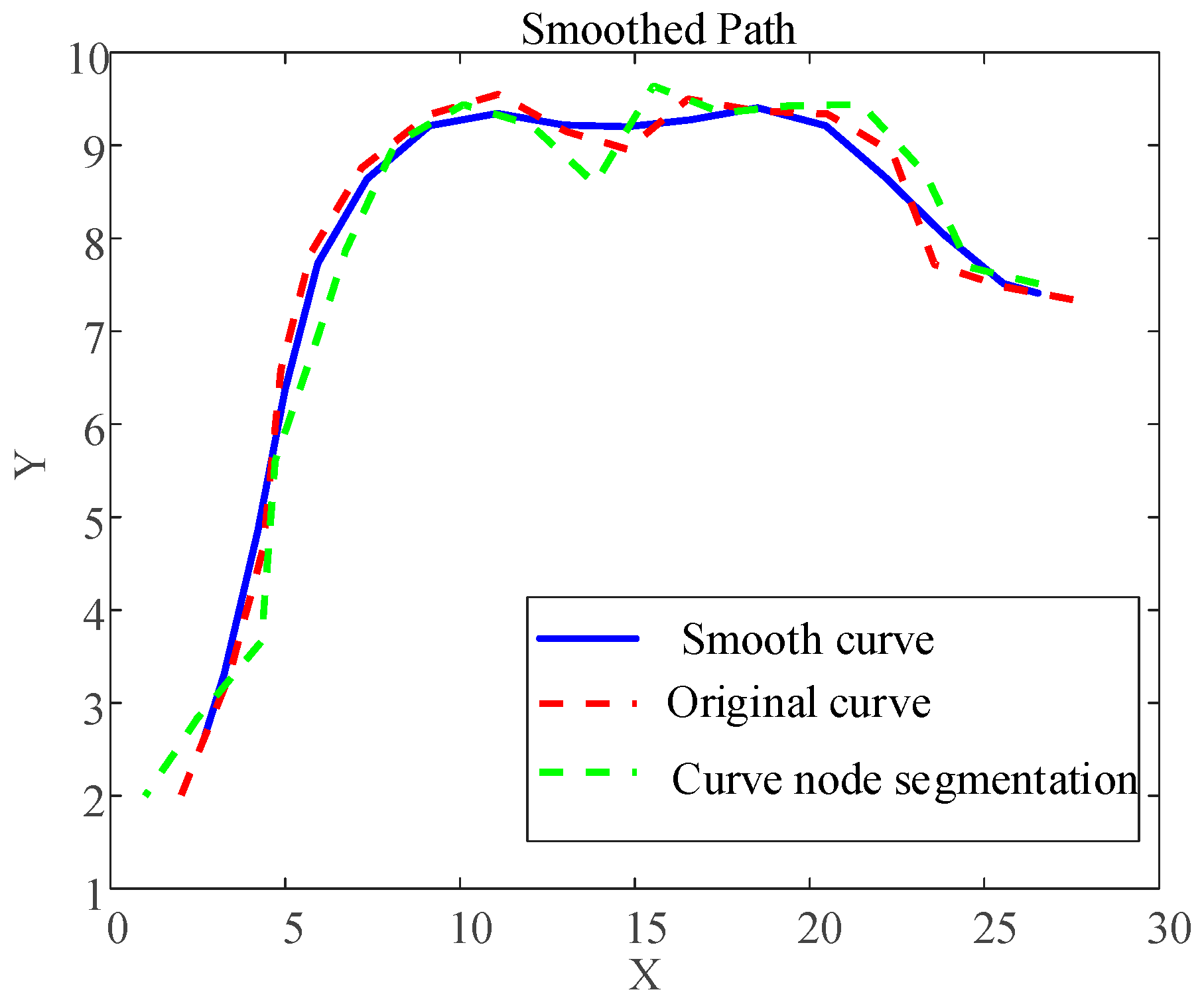
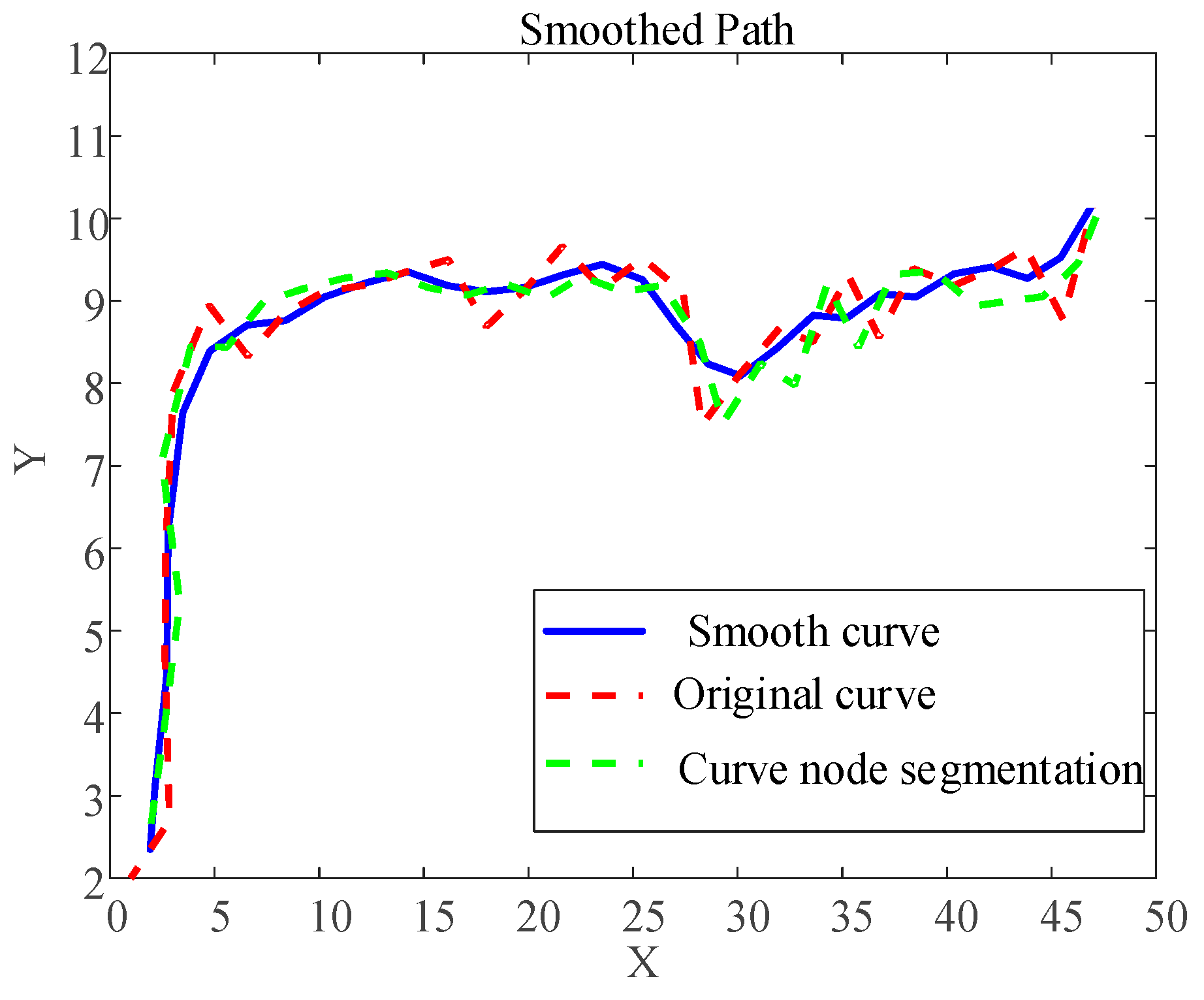
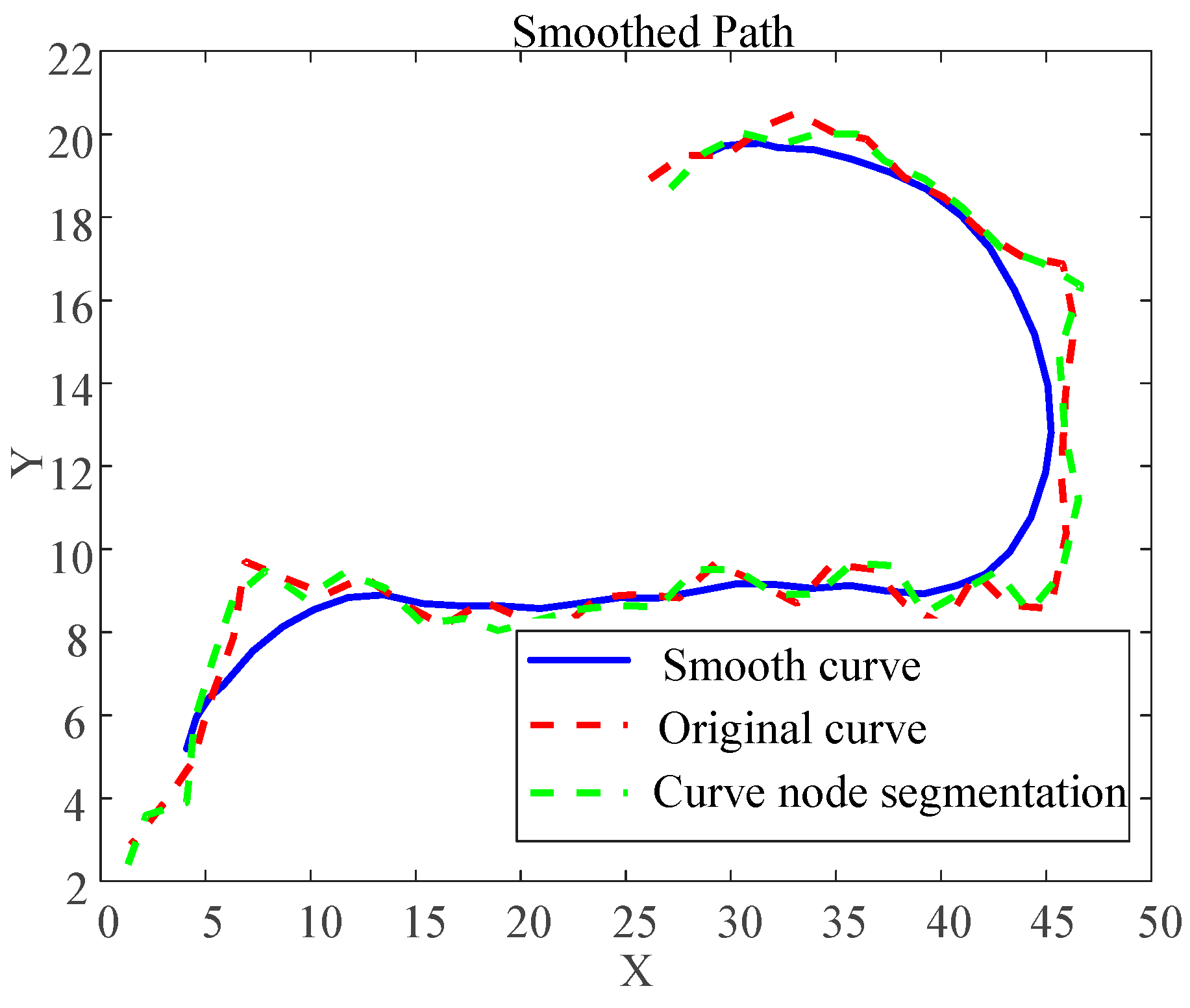
4.2. B-Spline Curve Path Optimization
- (1)
- The smoothed path is significantly smoother than the original path, with more continuous curvature changes in the curve segments.
- (2)
- The time-varying graphs show that the velocity, angular velocity, acceleration, angular acceleration, and jerk exhibit smaller variations at the turning points of the path, while these parameters remain mostly constant in the straight segments.
4.3. Algorithm Validation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Selvaraj, S.; Thangarajan, R.; Rithik, J.R.A.; Pranesan, S.; Karthika, M. Intelligent parking assistance using deep reinforcement learning and YOLOv8 in simulated environments. In Proceedings of the 2025 International Conference on Multi-Agent Systems for Collaborative Intelligence (ICMSCI), Erode, India, 20–22 January 2025; IEEE: Piscataway, NJ, USA, 2025; pp. 1721–1728. [Google Scholar]
- Huang, S.J.; Lin, G.Y. Parallel auto-parking of a model vehicle using a self-organizing fuzzy controller. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 997–1012. [Google Scholar] [CrossRef]
- Xu, X.; Xie, Y.; Li, R.; Zhao, Y.; Song, R.; Zhang, W. Hierarchical reinforcement learning for autonomous parking based on kinematic constraints. In Proceedings of the 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), Bangkok, Thailand, 10–14 December 2024; IEEE: Piscataway, NJ, USA, 2024. [Google Scholar]
- Zhang, J.; Chen, H.; Song, S.; Hu, F. Reinforcement learning-based motion planning for automatic parking system. IEEE Access 2020, 8, 154485–154501. [Google Scholar] [CrossRef]
- Gan, N.; Zhang, M.; Zhou, B.; Chai, T.; Wu, X.; Bian, Y. Spatio-temporal heuristic method: A trajectory planning for automatic parking considering obstacle behavior. J. Intell. Connect. Veh. 2022, 5, 177–187. [Google Scholar] [CrossRef]
- LaValle, S. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Iowa State University Research Report 9811. 1998, pp. 1–4. Available online: https://msl.cs.illinois.edu/~lavalle/papers/Lav98c.pdf (accessed on 1 July 2025).
- Dong, Y.; Zhong, Y.; Hong, J. Knowledge-biased sampling-based path planning for automated vehicles parking. IEEE Access 2020, 8, 156818–156827. [Google Scholar] [CrossRef]
- Wang, D.; Zheng, S.; Ren, Y.; Du, D. Path planning based on the improved RRT* algorithm for the mining truck. Comput. Mater. Contin. 2022, 71, 3571–3587. [Google Scholar] [CrossRef]
- Wang, J.; Li, J.; Yang, J.; Meng, X.; Fu, T. Automatic parking trajectory planning based on random sampling and nonlinear optimization. J. Frankl. Inst. 2023, 360, 9579–9601. [Google Scholar] [CrossRef]
- Jhang, J.H.; Lian, F.L. An autonomous parking system of optimally integrating bidirectional rapidly-exploring random trees and parking-oriented model predictive control. IEEE Access 2020, 8, 163502–163523. [Google Scholar] [CrossRef]
- Jhang, J.H.; Lian, F.L.; Hao, Y.H. Human-like motion planning for autonomous parking based on revised bidirectional rapidly-exploring random tree* with Reeds-Shepp curve. Asian J. Control 2021, 23, 1146–1160. [Google Scholar] [CrossRef]
- Meng, X.; Wang, N.; Liu, Q.; Sun, G. Aircraft parking trajectory planning in semistructured environment based on kinodynamic safety rrt∗. Math. Probl. Eng. 2021, 2021, 3872248. [Google Scholar] [CrossRef]
- Kim, M.; Ahn, J.; Park, J. TargetTree-rrt*: Continuous-curvature path planning algorithm for autonomous parking in complex environments. IEEE Trans. Autom. Sci. Eng. 2022, 21, 606–617. [Google Scholar] [CrossRef]
- Wang, W.; Li, J.; Bai, Z.; Wei, Z.; Peng, J. Toward optimization of AGV path planning: An RRT*-ACO algorithm. IEEE Access 2024, 12, 18387–18399. [Google Scholar] [CrossRef]
- Ma, G.; Duan, Y.; Li, M.; Xie, Z.; Zhu, J. A probability smoothing bi-rrt path planning algorithm for indoor robot. FGCS 2023, 143, 349–360. [Google Scholar] [CrossRef]
- Wang, J.; Li, T.; Li, B.; Meng, M.Q.-H. GMR-RRT*: Sampling-based path planning using gaussian mixture regression. IEEE Trans. Intell. Veh. 2022, 7, 690–700. [Google Scholar] [CrossRef]
- Ganesan, S.; Ramalingam, B.; Mohan, R.E. A hybrid sampling-based rrt* path planning algorithm for autonomous mobile robot navigation. Expert Syst. Appl. 2024, 258, 125206. [Google Scholar] [CrossRef]
- Caminiti, C.M.; Dimovski, A.; Edeme, D.; Carnovali, T.; Corigliano, S.; Gadelha, V.; Ragaini, E.; Merlo, M. The GISEle framework: Innovations in rural electrification planning. In Proceedings of the 2024 IEEE International Humanitarian Technologies Conference (IHTC), Bari, Italy, 27–30 November 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–7. [Google Scholar]
- Polack, P.; Altché, F.; d’Andréa-Novel, B.; de La Fortelle, A. The kinematic bicycle model: A consistent model for planning feasible trajectories for autonomous vehicles? In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 812–818. [Google Scholar]
- Wu, B.; Qian, L.; Lu, M.; Qiu, D.; Liang, H. Optimal control problem of multi-vehicle cooperative autonomous parking trajectory planning in a connected vehicle environment. IET Intell. Transp. Syst. 2019, 13, 1677–1685. [Google Scholar] [CrossRef]
- Yang, H.; Xu, X.; Hong, J. Automatic parking path planning of tracked vehicle based on improved A* and DWA algorithms. IEEE Trans. Transp. Electrif. 2022, 9, 283–292. [Google Scholar] [CrossRef]
- Chen, L.; Shan, Y.; Tian, W.; Li, B.; Cao, D. A fast and efficient double-tree rrt* -like sampling-based planner applying on mobile robotic systems. IEEE/ASME Trans. Mechatron. 2018, 23, 2568–2578. [Google Scholar] [CrossRef]
- Wang, B.; Ju, D.; Xu, F.; Feng, C.; Xun, G. CAF-RRT*: A 2D path planning algorithm based on circular arc fillet method. IEEE Access 2022, 10, 127168–127181. [Google Scholar] [CrossRef]
- Han, Z.; Sun, H.; Huang, J.; Xu, J.; Tang, Y.; Liu, X. Path planning algorithms for smart parking: Review and prospects. World Electr. Veh. J. 2024, 15, 322. [Google Scholar] [CrossRef]
- Cano, A.; Arévalo, P.; Benavides, D.; Jurado, F. Comparative analysis of HESS (battery/supercapacitor) for power smoothing of PV/HKT, simulation and experimental analysis. J. Power Sources 2022, 549, 232137. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| goal_region_radius | numNodes | EPS | delta | Δt | vmax | w_max | amax | gamma_max |
|---|---|---|---|---|---|---|---|---|
| 2 | 1,000,000 | 1 | 0.5 | 10 s | 10 km/h | pi | 2 | pi |
| Parking Type | Algorithm | Path Length | Heading Change | Time | Node Count | Success Rate |
|---|---|---|---|---|---|---|
| Vertical | RRT | 75.66 | 1076.27° | 1.069 | 607.3 | 47.20% |
| Vertical | Bi-RRT | 75.41 | 1046.75° | 9.061 | 573.5 | 80.20% |
| Vertical | PSBi-RRT | 74.74 | 974.18° | 0.856 | 313.5 | 84.51% |
| Angled | RRT | 46.39 | 511.26° | 0.570 | 588 | 40.10% |
| Angled | Bi-RRT | 47.11 | 523.62° | 0.629 | 94.2 | 66.67% |
| Angled | PSBi-RRT | 45.21 | 478.01° | 0.261 | 64.5 | 90.66% |
| Parallel | RRT | 25.39 | 305.89° | 0.135 | 597 | 37.43% |
| Parallel | Bi-RRT | 25.89 | 281.21° | 2.513 | 84.4 | 90.95% |
| Parallel | PSBi-RRT | 24.36 | 222.22° | 0.046 | 56 | 92.57% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Ma, R.; Lu, C.; Deng, Y. Autonomous Parking Path Planning Method for Intelligent Vehicles Based on Improved RRT Algorithm. World Electr. Veh. J. 2025, 16, 374. https://doi.org/10.3390/wevj16070374
Chen J, Ma R, Lu C, Deng Y. Autonomous Parking Path Planning Method for Intelligent Vehicles Based on Improved RRT Algorithm. World Electric Vehicle Journal. 2025; 16(7):374. https://doi.org/10.3390/wevj16070374
Chicago/Turabian StyleChen, Jian, Rongqi Ma, Cunhao Lu, and Yaoji Deng. 2025. "Autonomous Parking Path Planning Method for Intelligent Vehicles Based on Improved RRT Algorithm" World Electric Vehicle Journal 16, no. 7: 374. https://doi.org/10.3390/wevj16070374
APA StyleChen, J., Ma, R., Lu, C., & Deng, Y. (2025). Autonomous Parking Path Planning Method for Intelligent Vehicles Based on Improved RRT Algorithm. World Electric Vehicle Journal, 16(7), 374. https://doi.org/10.3390/wevj16070374