
Research on Electric Vehicle Charging Load Forecasting Method Based on Improved LSTM Neural Network


Abstract
1. Introduction
2. Electric Vehicle Charging Load Prediction Methods
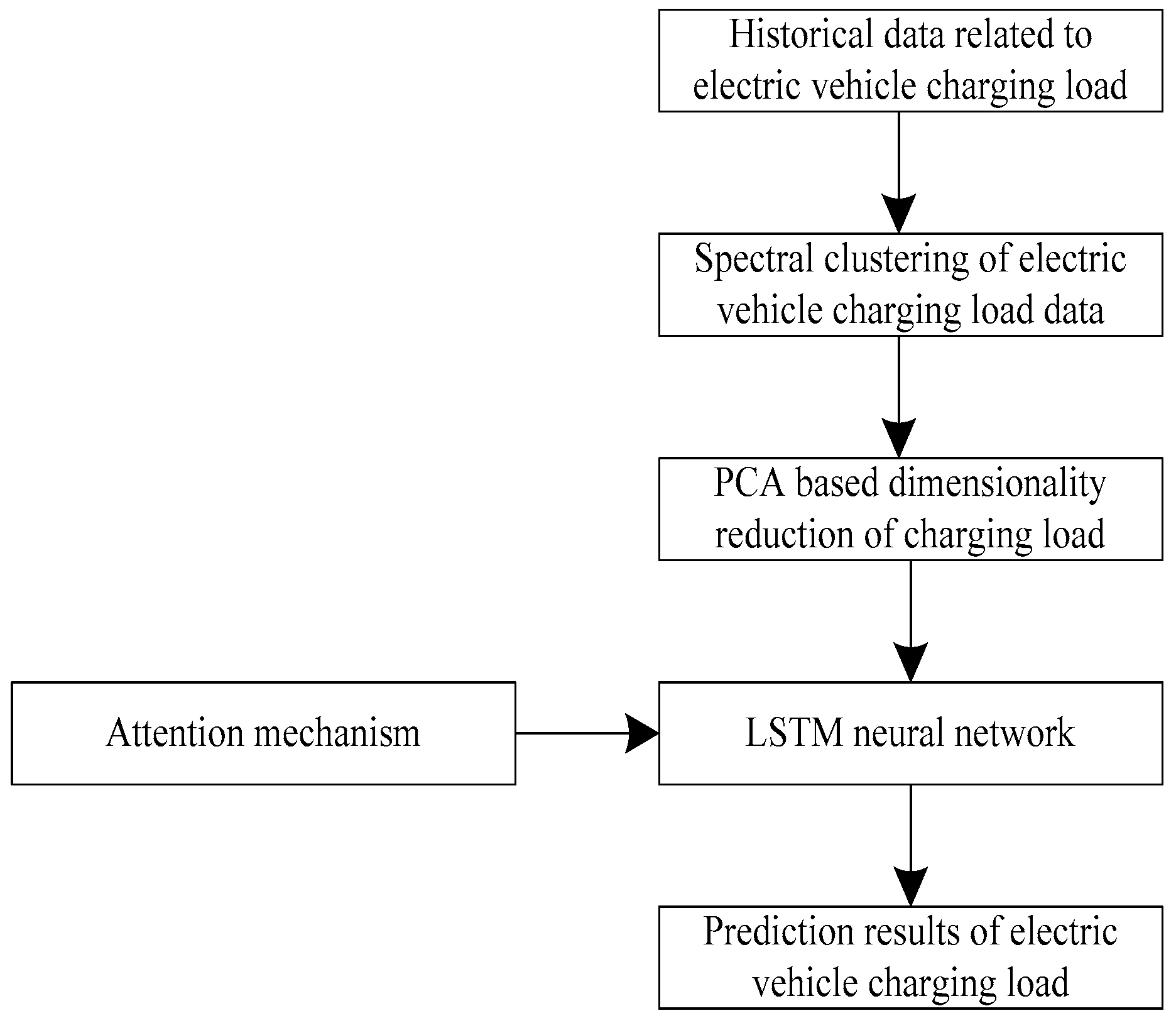
2.1. Overall Architecture for EV Charging Load Forecasting
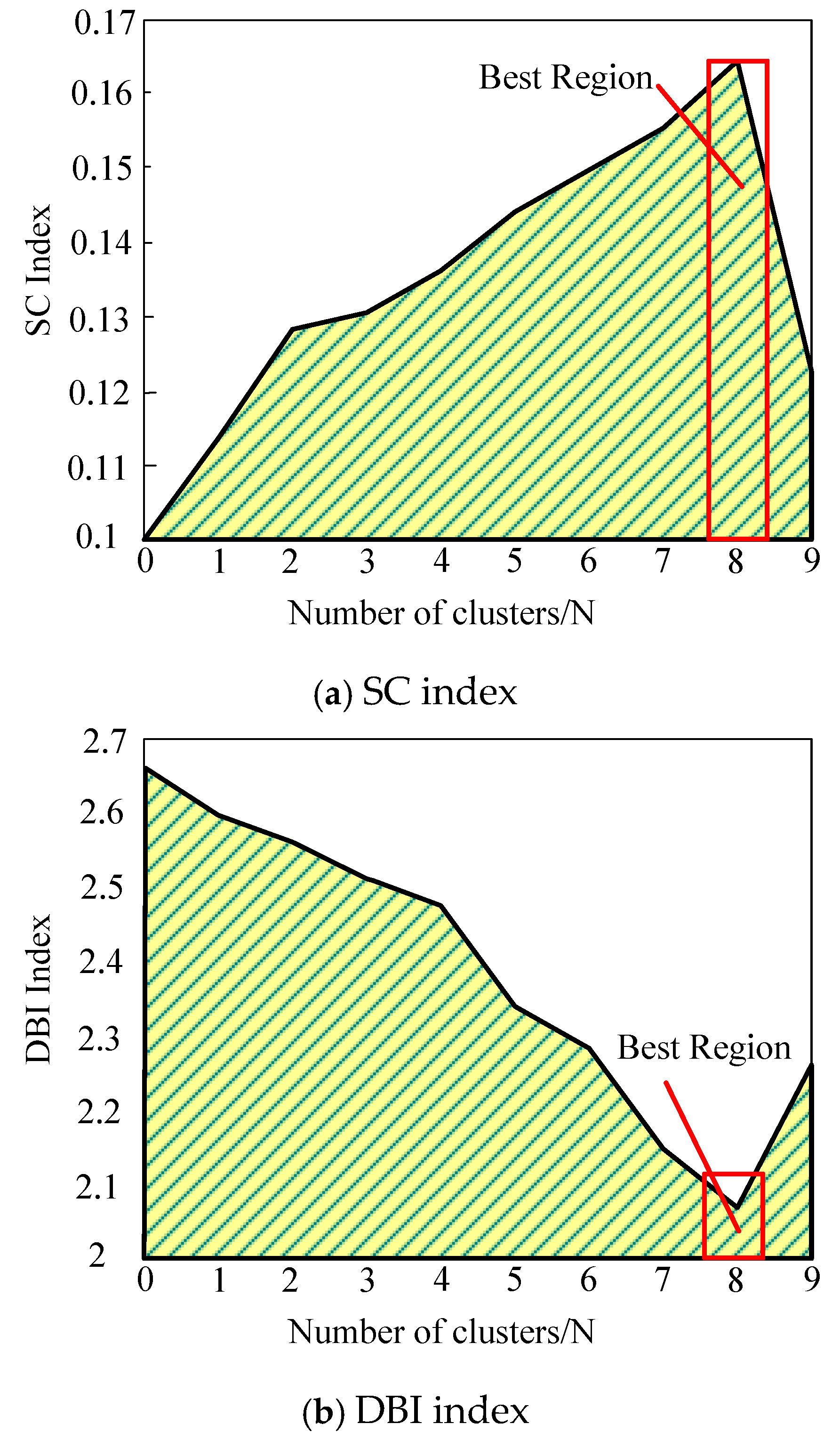
2.2. Clustering of Electric Vehicle Charging Load Data Based on Spectral Clustering Algorithm
2.3. Dimensionality Reduction Processing of Electric Vehicle Charging Load Data Based on Principal Component Analysis
2.4. Charging Load Prediction Based on Improved LSTM Neural Network
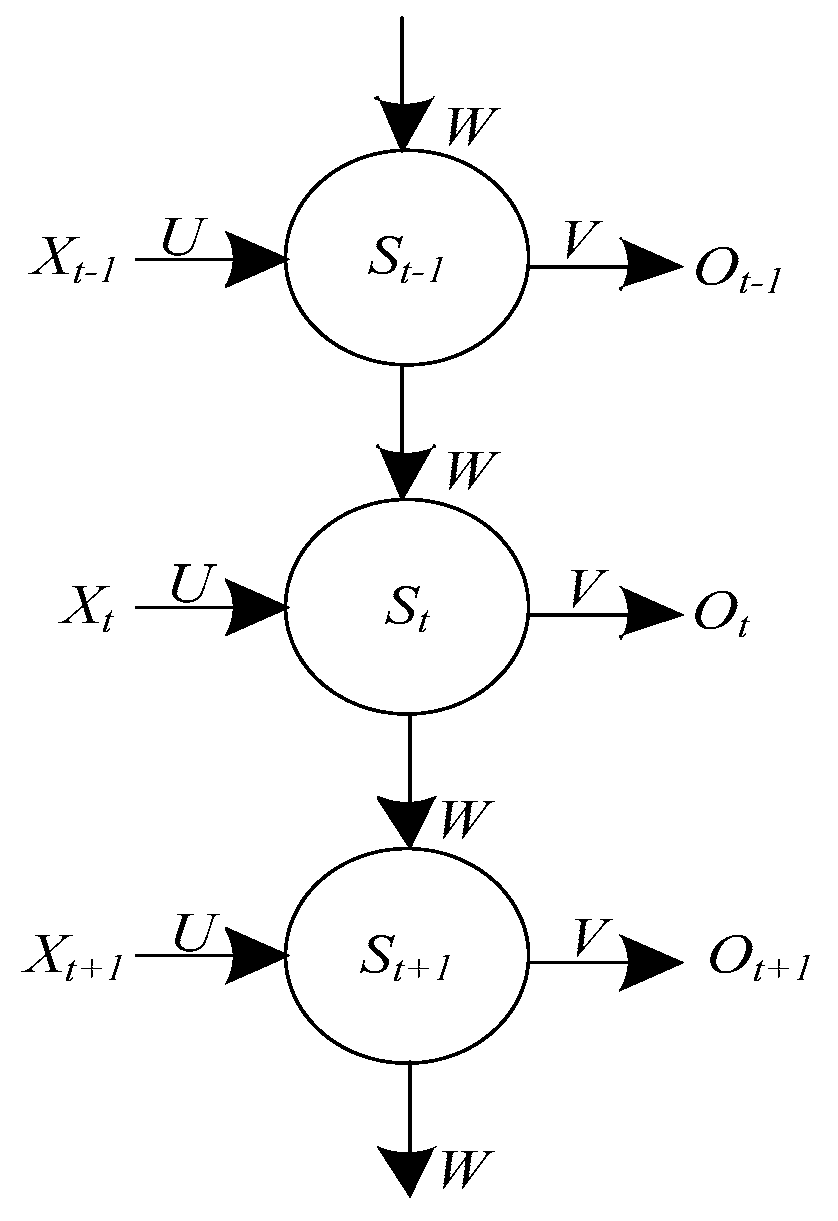
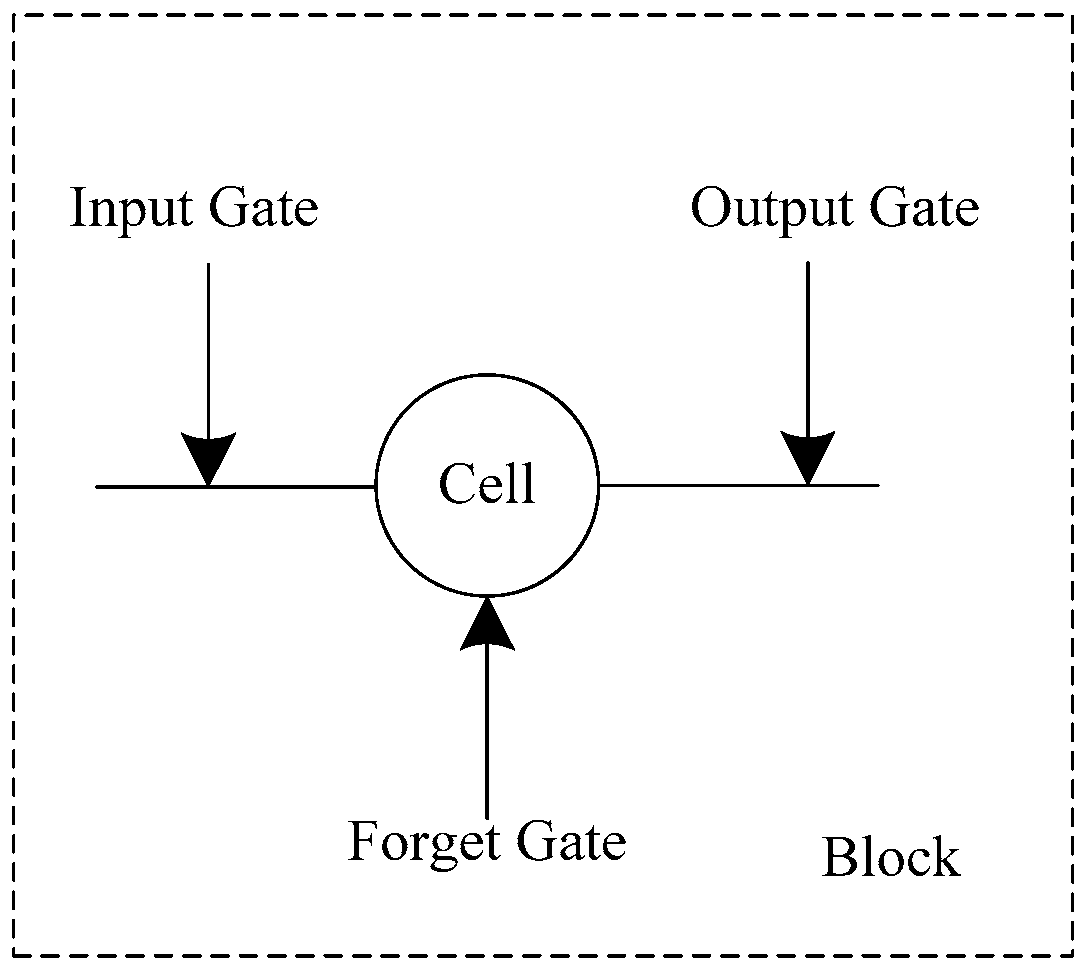
2.4.1. LSTM Neural Network for Electric Vehicle Charging Load Prediction
2.4.2. Improvement of LSTM Neural Network Based on Attention Mechanism
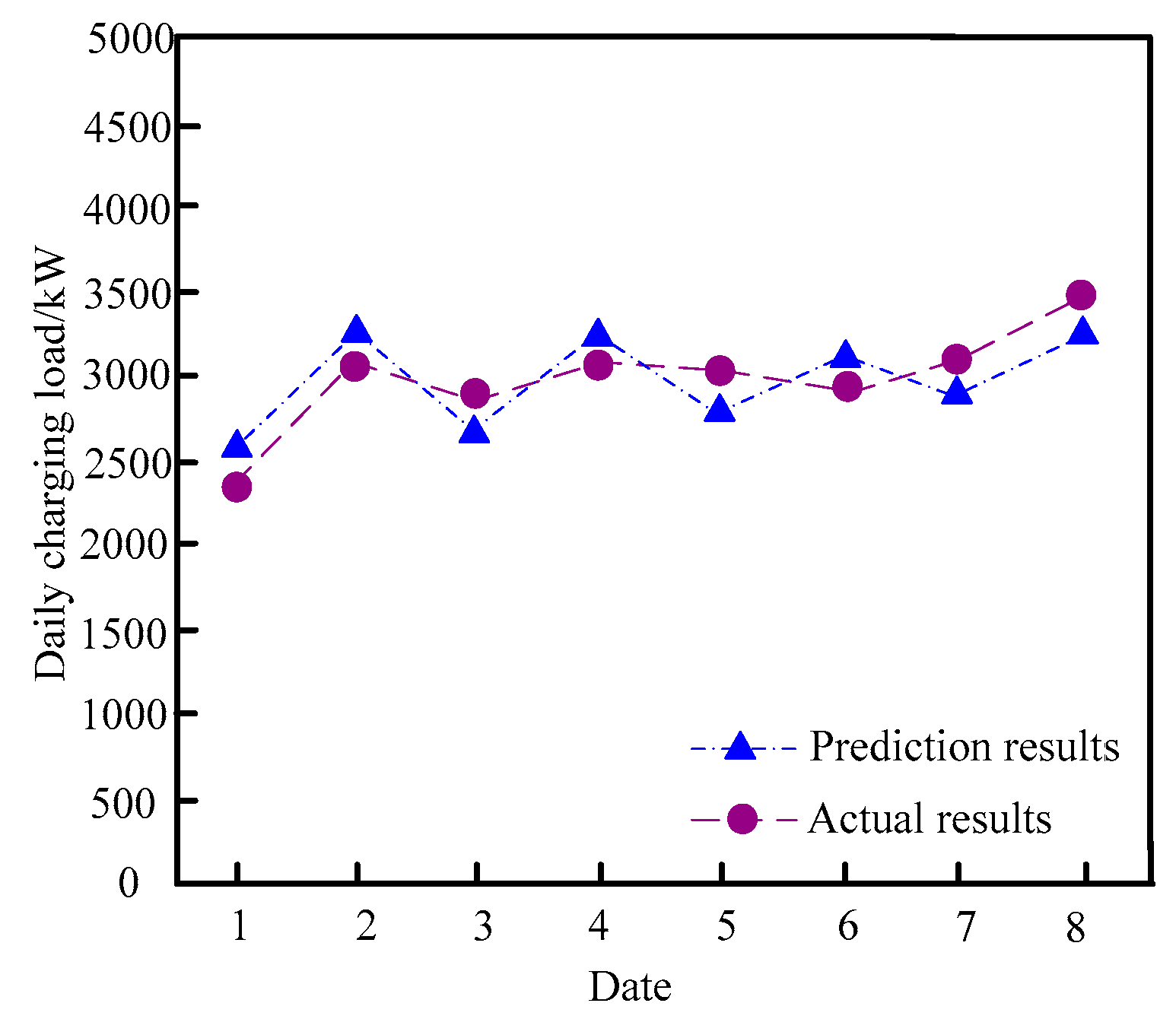
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Srihari, N.; Sanjeeb, M. Grid connected electric vehicle charging and discharging rate management with balance grid load. Electr. Eng. 2023, 105, 575–592. [Google Scholar]
- Gao, X.; Carne, G.D.; Andresen, M.; Bruske, S.; Liserre, M. Voltage-dependent load levelling approach by means of electric vehicle fast charging stations. IEEE Trans. Transp. Electrif. 2021, 7, 1099–1111. [Google Scholar] [CrossRef]
- Krol, A.; Sierpinski, G. Application of a genetic algorithm with a fuzzy objective function for optimized siting of electric vehicle charging devices in urban road networks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 8680–8691. [Google Scholar] [CrossRef]
- Zishan, A.A.; Haji, M.M.; Ardakanian, O. Adaptive congestion control for electric vehicle charging in the smart grid. IEEE Trans. Smart Grid 2021, 12, 2439–2449. [Google Scholar] [CrossRef]
- Liikkanen, J.; Moilanen, S.; Kosonen, A.; Ruuskanen, V.; Ahola, J. Cost-effective optimization for electric vehicle charging in a prosumer household. Sol. Energy 2024, 267, 112122. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.R.; Xie, C.; Zeng, H.D. Bi-Level Programming Model of Electric Vehicle Charging Station Considering Road Network Structure. Comput. Simul. 2022, 39, 173–177. [Google Scholar]
- Arivalahan, R.; Balaji, S. An optimization framework for capacity allocation and energy management of fast electric vehicle charging stations-wind photovoltaic energy using artificial transgender longicorn algorithm. Int. J. Energy Res. 2022, 46, 14827–14844. [Google Scholar] [CrossRef]
- Unterluggauer, T.; Rauma, K.; Jrventausta, P.; Rehtanz, C. Short-term load forecasting at electric vehicle charging sites using a multivariate multi-step long short-term memory: A case study from Finland. IET Electr. Syst. Transp. 2021, 11, 405–419. [Google Scholar] [CrossRef]
- Mazzi, Y.; Sassi, H.B.; Gaga, A.; Errahimi, F. State of charge estimation of an electric vehicle’s battery using tiny neural network embedded on small microcontroller units. Int. J. Energy Res. 2022, 46, 8102–8119. [Google Scholar] [CrossRef]
- Arun, K.K.; Rao, S. A hybrid cooperative method with lévy flights for electric vehicle charge scheduling. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14306–14321. [Google Scholar]
- Li, H.T.; Tang, M.N.; Mu, Y.F.; Wang, Y.H.; Yang, T.; Wang, H.J. Achieving accurate and balanced regional electric vehicle charging load forecasting with a dynamic road network: A case study of Lanzhou City. Appl. Intell. 2024, 54, 9230–9252. [Google Scholar] [CrossRef]
- Mekkaoui, D.E.; Midoun, M.A.; Shen, Y. LA-RCNN: Luong attention-recurrent-convolutional neural network for EV charging load prediction. Appl. Intell. 2024, 54, 4352–4369. [Google Scholar] [CrossRef]
- Tang, J.R.; Ge, G.H.; Liu, J.C.; Yang, H.H. A Novel Ultra Short-Term Load Forecasting Method for Regional Electric Vehicle Charging Load Using Charging Pile Usage Degree. Energy Eng. 2023, 120, 1107–1132. [Google Scholar] [CrossRef]
- Huang, X.S.; Wu, D.; Boulet, B. MetaProbformer for Charging Load Probabilistic Forecasting of Electric Vehicle Charging Stations. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10445–10455. [Google Scholar] [CrossRef]
- Elghanam, E.; Hassan, M.; Osman, A.; Kabalan, H. Design and performance analysis of misalignment tolerant charging coils for wireless electric vehicle charging systems. World Electr. Veh. J. 2021, 12, 89. [Google Scholar] [CrossRef]
- Khezri, R.; Razmi, P.; Mahmoudi, A.; Bidram, A.; Khooban, M.H. Machine learning-based sizing of a renewable-battery system for grid-connected homes with fast-charging electric vehicle. IEEE Trans. Sustain. Energy 2023, 14, 837–848. [Google Scholar] [CrossRef]
- Dcruz, H.J.; Baskaran, K. A novel non-isolated three-port bidirectional dc-dc converter for off-grid solar powered charging for electric and hydrogen vehicle using stm32 microcontroller. Int. J. Heavy Veh. Syst. 2022, 29, 281–304. [Google Scholar] [CrossRef]
- Xia, F.; Chen, H.; Shahidehpour, M.; Gan, W.; Yan, M.; Chen, L. Distributed expansion planning of electric vehicle dynamic wireless charging system in coupled power-traffic networks. IEEE Trans. Smart Grid 2021, 12, 3326–3338. [Google Scholar] [CrossRef]
- Koundinya Sistla Pavan Venkat Sai, N.; Shivkumar, V.; Krishnan, N.; Sharma, G.; Senjyu, T. Voltage stability analysis of distribution systems in presence of electric vehicle charging stations with coordinated charging scheme. Int. Trans. Electr. Energy Syst. 2021, 31, e13248. [Google Scholar] [CrossRef]
- Madahi, S.S.K.; Nafisi, H.; Abyaneh, H.A.; Marzband, M. Co-optimization of energy losses and transformer operating costs based on smart charging algorithm for plug-in electric vehicle parking lots. IEEE Trans. Transp. Electrif. 2021, 7, 527–541. [Google Scholar] [CrossRef]
- Memarzadeh, G.; Keynia, F. Short-term electricity load and price forecasting by a new optimal lstm-nn based prediction algorithm. Electr. Power Syst. Res. 2021, 192, 106995. [Google Scholar] [CrossRef]
- Subbiah, S.; Chinnappan, J. Deep learning based short term load forecasting with hybrid feature selection. Electr. Power Syst. Res. 2022, 210, 108065. [Google Scholar] [CrossRef]
- Tajalli, S.Z.; Kavousi-Fard, A.; Mardaneh, M.; Khosravi, A.; Razavi-Far, R. Uncertainty-aware management of smart grids using cloud-based lstm-prediction interval. IEEE Trans. Cybern. 2021, 52, 9964–9977. [Google Scholar] [CrossRef] [PubMed]
- Serrano-Guerrero, X.; Marco Briceo-León Clairand, J.M.; Guillermo, E. A new interval prediction methodology for short-term electric load forecasting based on pattern recognition. Appl. Energy 2021, 297, 117173. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator Name | Result |
|---|---|
| Input voltage | 220 V |
| Output power | 5 KW |
| Frequency | 60 Hz |
| Permissible voltage fluctuation range | ±13% |
| Waterproof level | IP67 |
| Voltage withstand | 2 kV |
| Insulation resistance | 500 MΩ |
| Load Point Number | Number of Time Periods | Temperature/°C | Historical Load/kW |
|---|---|---|---|
| 1 | 3 | 15.1 | 1052.6 |
| 2 | 2 | 14.8 | 1154.5 |
| 3 | 4 | 12.5 | 1345.2 |
| 4 | 2 | 13.5 | 1325.4 |
| 5 | 3 | 14.5 | 1425.1 |
| 6 | 4 | 13.6 | 1254.5 |
| 7 | 5 | 11.8 | 1524.3 |
| 8 | 2 | 12.6 | 1105.3 |
| 9 | 1 | 13.4 | 1045.6 |
| 10 | 3 | 15.1 | 1246.5 |
| Error Metric | Numerical Value |
|---|---|
| MAE | 1.42 kWh |
| MSE | 3.56 kWh2 |
| Wilcoxon signed-rank test results | 0.0003 |
| Number | Name | Characteristic Value | Contribution Rate/% | Accumulated Contribution Rate/% |
|---|---|---|---|---|
| 1 | Date of load point | 3.854 | 46.58 | 46.58 |
| 2 | Category of date | 2.165 | 18.55 | 65.13 |
| 3 | The time period to which the load point belongs | 1.285 | 10.85 | 75.98 |
| 4 | Load point temperature | 1.054 | 8.58 | 84.56 |
| 5 | Load point rainfall | 0.854 | 7.67 | 92.23 |
| 6 | Historical load | 0.645 | 6.25 | 98.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Wang, Y.; Song, F. Research on Electric Vehicle Charging Load Forecasting Method Based on Improved LSTM Neural Network. World Electr. Veh. J. 2025, 16, 265. https://doi.org/10.3390/wevj16050265
Wang C, Wang Y, Song F. Research on Electric Vehicle Charging Load Forecasting Method Based on Improved LSTM Neural Network. World Electric Vehicle Journal. 2025; 16(5):265. https://doi.org/10.3390/wevj16050265
Chicago/Turabian StyleWang, Chengmin, Yangzi Wang, and Fulong Song. 2025. "Research on Electric Vehicle Charging Load Forecasting Method Based on Improved LSTM Neural Network" World Electric Vehicle Journal 16, no. 5: 265. https://doi.org/10.3390/wevj16050265
APA StyleWang, C., Wang, Y., & Song, F. (2025). Research on Electric Vehicle Charging Load Forecasting Method Based on Improved LSTM Neural Network. World Electric Vehicle Journal, 16(5), 265. https://doi.org/10.3390/wevj16050265