
Adaptive Sliding Mode Control for Yaw Stability of Four-Wheel Independent-Drive EV Based on the Phase Plane


Abstract
1. Introduction
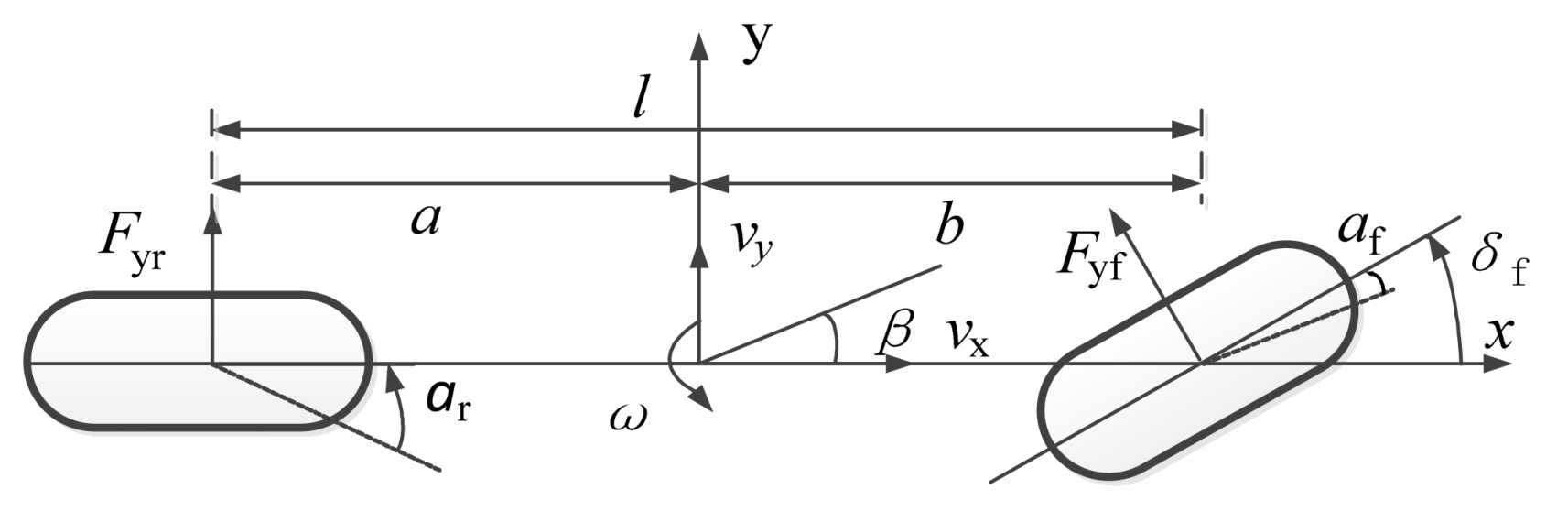
2. Vehicle Dynamic Model
2.1. Reference Model
2.2. Tire Model
3. Establishment of Phase Plane
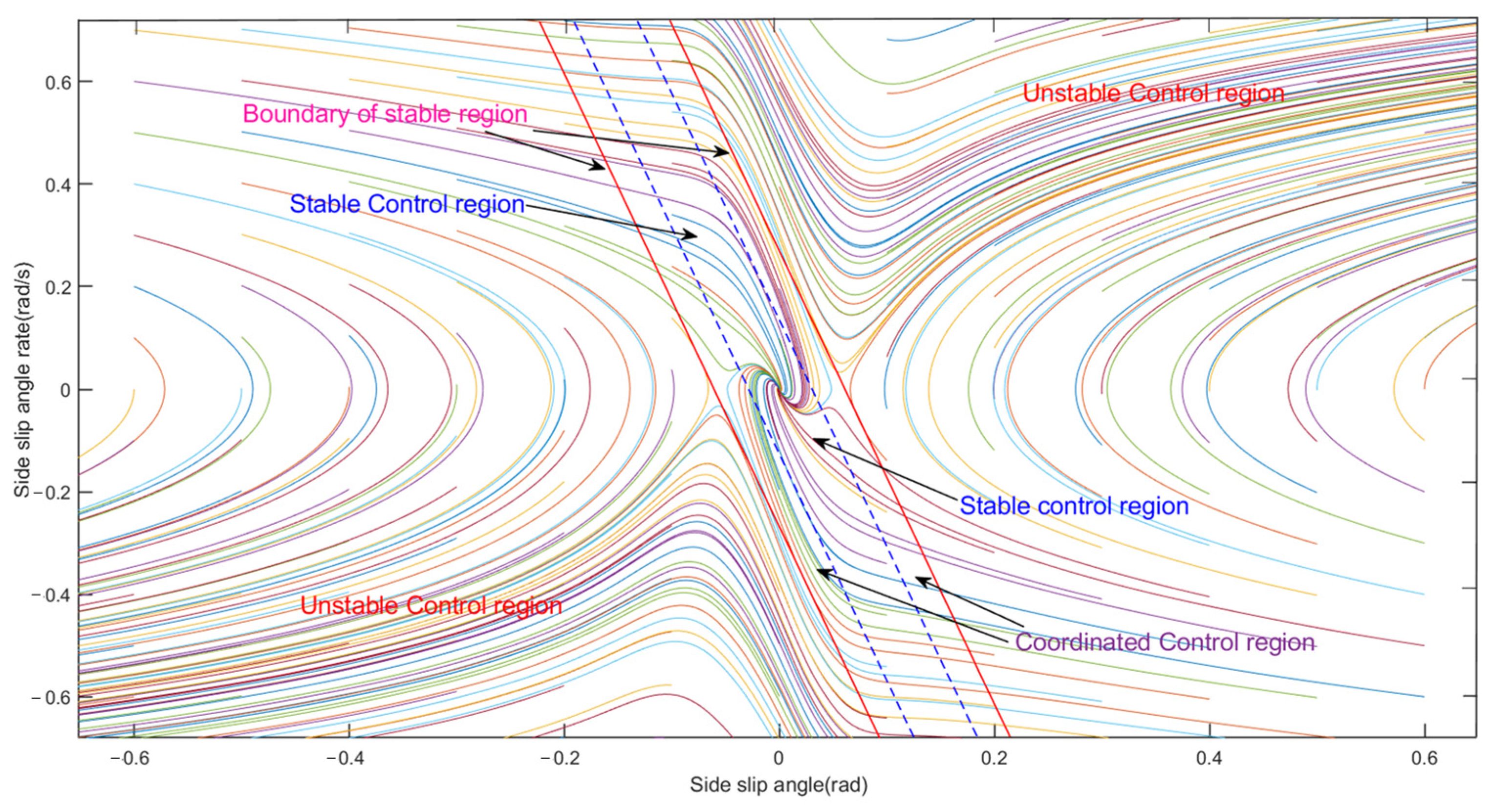
3.1. Establishment of Phase Plane and Division of Stability Region
3.2. Stable Boundary Equation of Phase Plane
4. Design of Yaw Stability Controller
4.1. Design of ASMC Controller for Yaw Rate
4.2. Design of ASMC Controller for Sideslip Angle
4.3. Stability Analysis of Control System
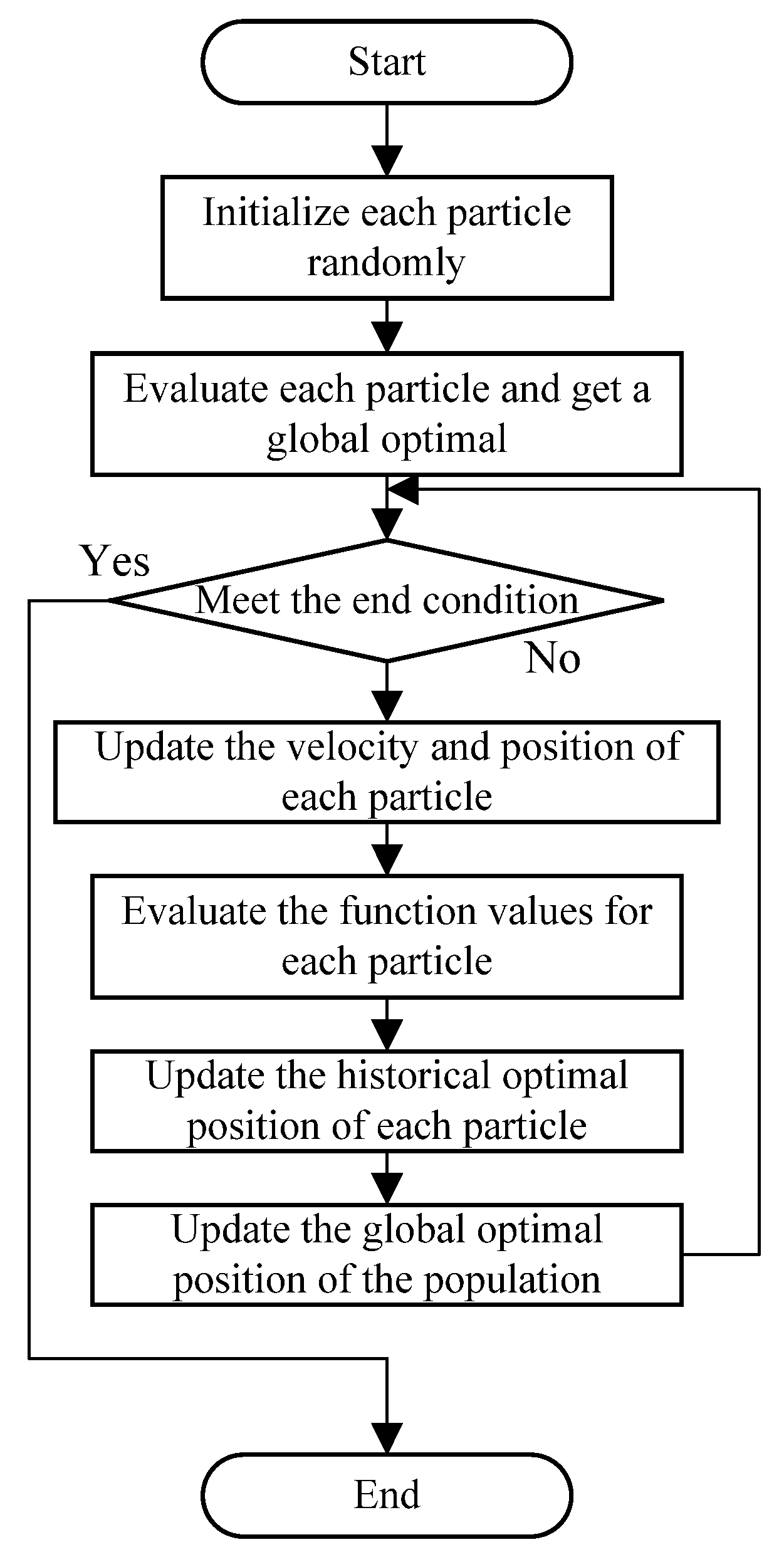
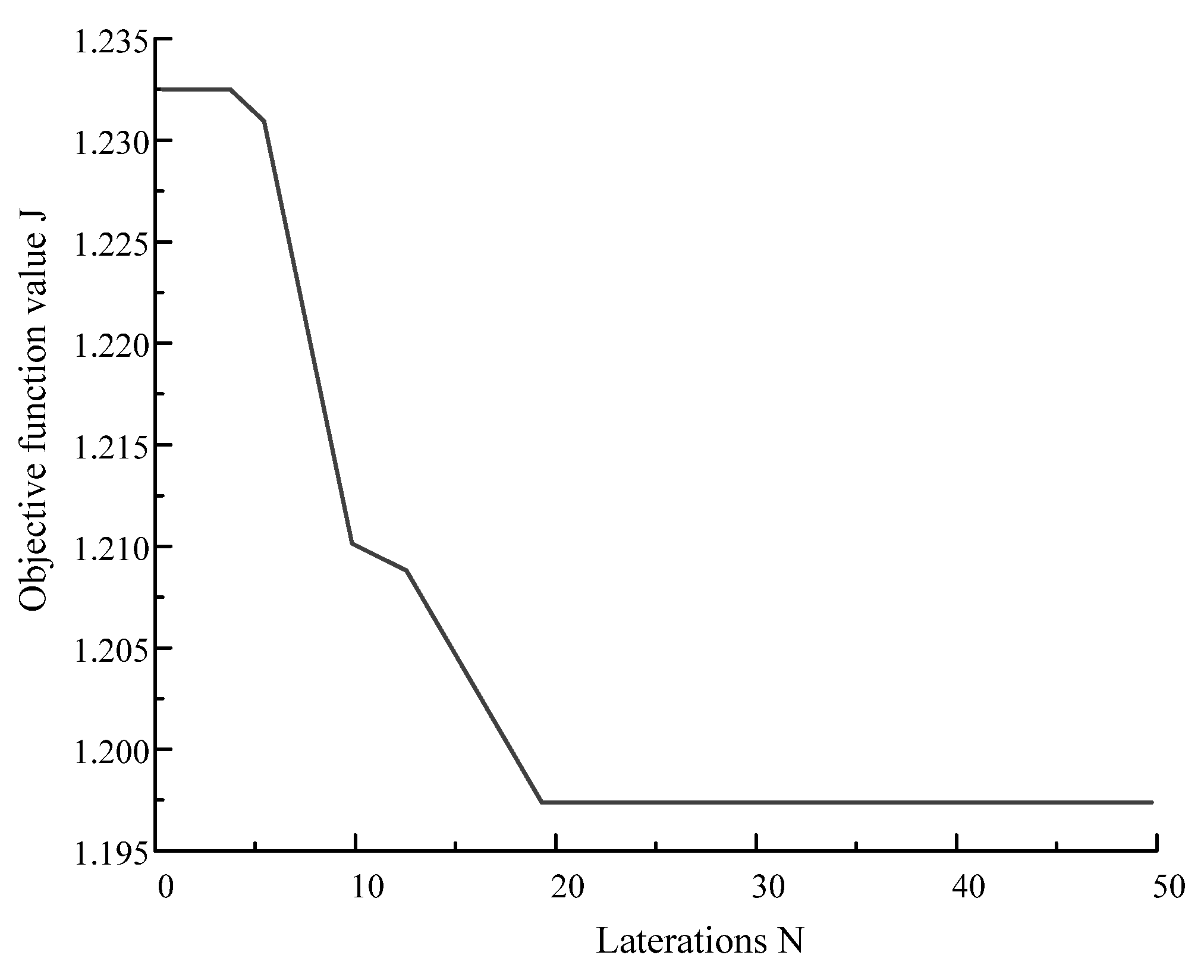
4.4. Particle Swarm Optimization of Sliding Mode Control Parameters
4.5. Joint Controller
4.6. Drive Torque Distribution
5. Simulation Analysis
5.1. Simulation and Verification of Yaw Moment Controller
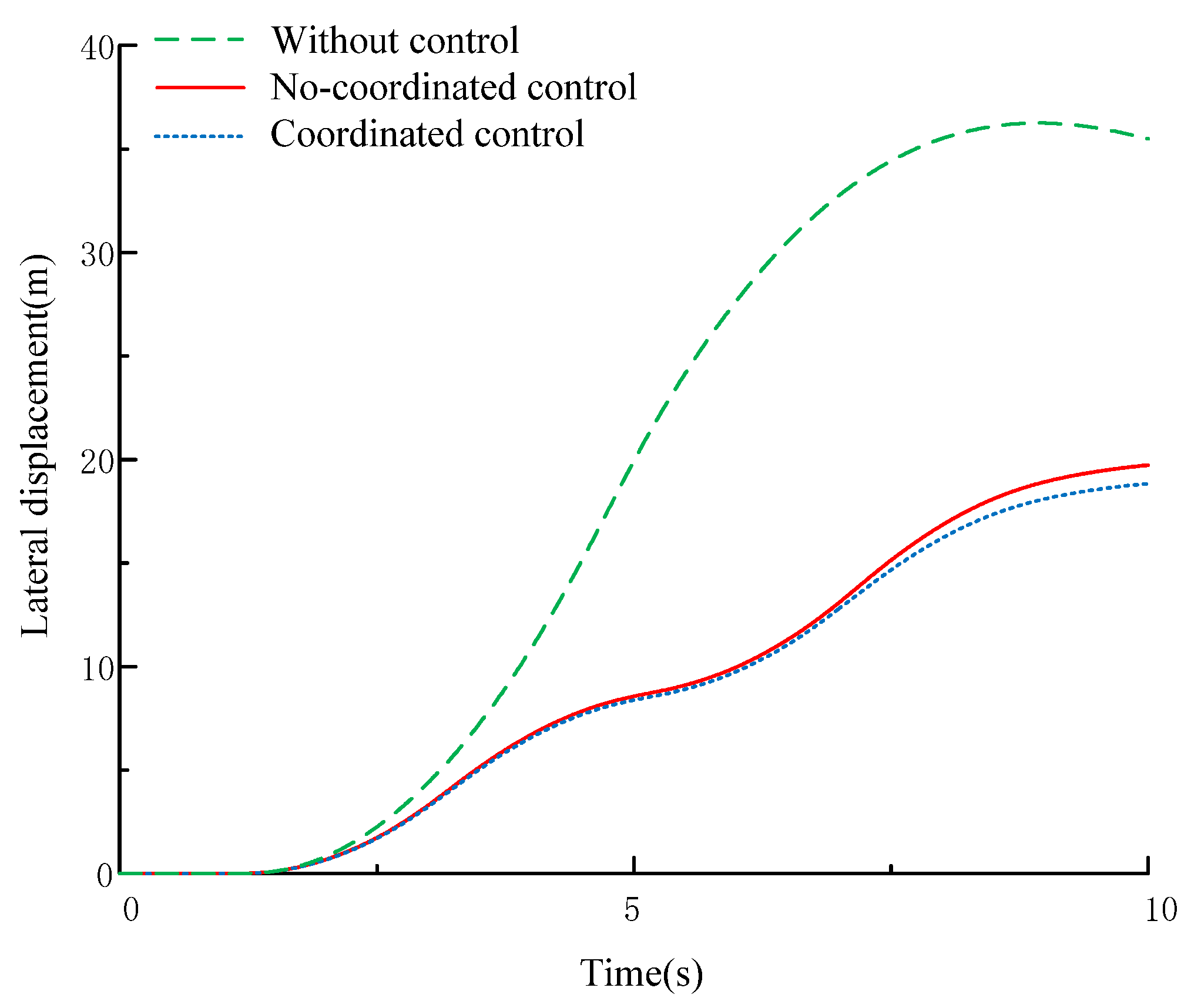
5.2. Lane Change Simulation
5.3. Serpentine Test
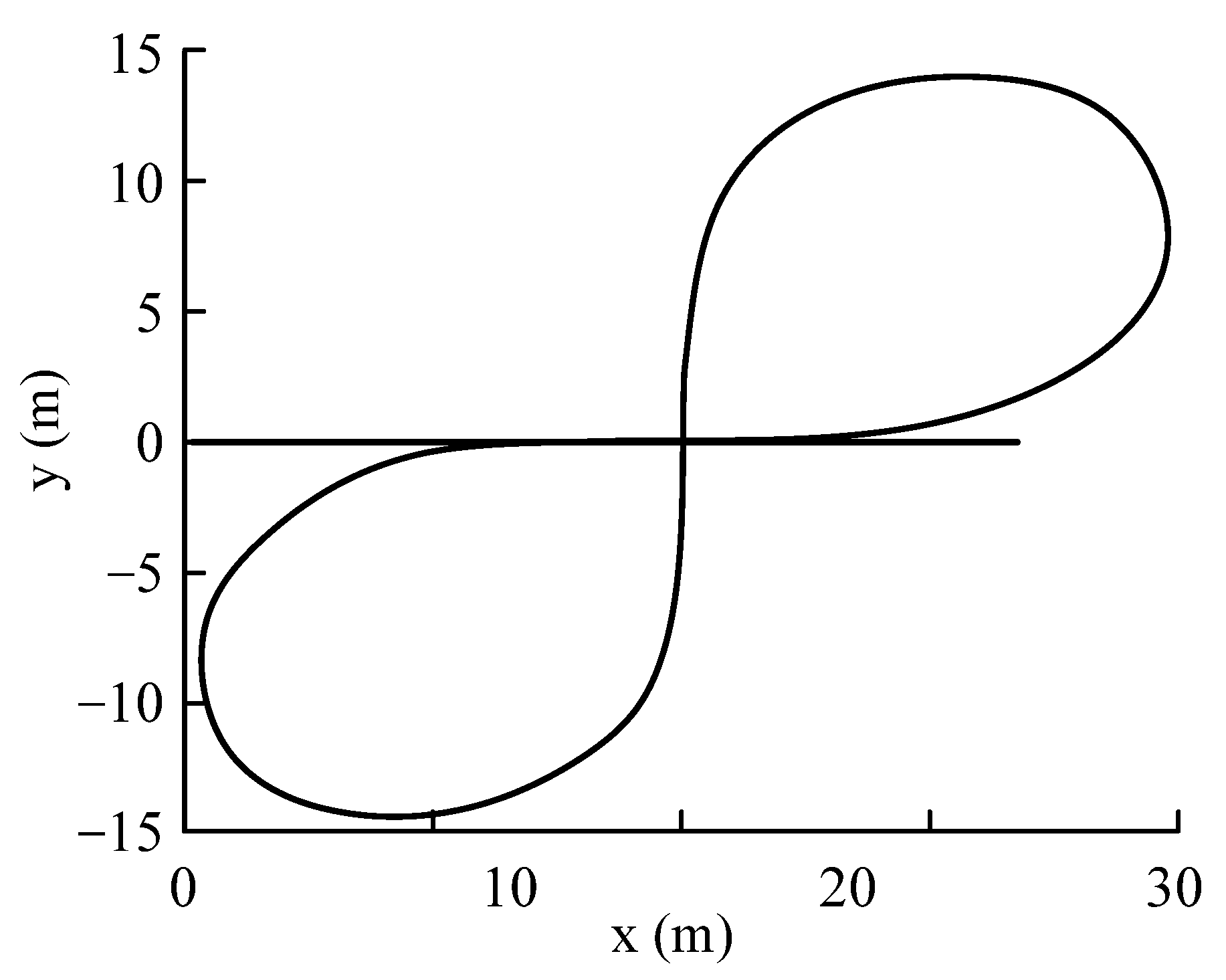
5.4. Lemniscate Test
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, Z.P.; Leng, B.; Xiong, L.; Feng, Y.; Shi, F.M. Direct Yaw Moment Control for Distributed Drive Electric Vehicle Handling Performance Improvement. Chin. J. Mech. Eng. 2016, 29, 486–497. [Google Scholar] [CrossRef]
- Tian, J.; Tong, J.; Luo, S. Differential Steering Control of Four-Wheel Independent-Drive Electric Vehicles. Energies 2018, 11, 2892. [Google Scholar] [CrossRef]
- Zhang, H.; Xiao, Q.; Wang, C.G.; Zhou, X.J. The Impact of the Lateral Non-Linear Stability of the High-Speed Railway Vehicle Caused by the Yaw Damper. In Proceedings of the 3rd International Symposium on Innovation and Sustainability of Modern Railway (ISMR 2012), E China Jiaotong Univ, Nanchang, China, 20–21 September 2012; p. 563. [Google Scholar]
- Aoki, A.; Marumo, Y.; Kageyama, I. Effects of multiple axles on the lateral dynamics of multi-articulated vehicles. Veh. Syst. Dyn. 2013, 51, 338–359. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.H.; Han, F.L. On nonsingular terminal sliding-mode control of nonlinear systems. Automatica 2013, 49, 1715–1722. [Google Scholar] [CrossRef]
- Wu, B.L.; Wang, D.W.; Poh, E.K. Decentralized sliding-mode control for attitude synchronization in spacecraft formation. Int. J. Robust Nonlinear Control 2013, 23, 1183–1197. [Google Scholar] [CrossRef]
- Chen, M.; Mei, R.; Jiang, B. Sliding Mode Control for a Class of Uncertain MIMO Nonlinear Systems with Application to Near-Space Vehicles. Math. Probl. Eng. 2013, 2013, 9. [Google Scholar] [CrossRef]
- Sun, H.B.; Li, S.H.; Sun, C.Y. Finite time integral sliding mode control of hypersonic vehicles. Nonlinear Dyn. 2013, 73, 229–244. [Google Scholar] [CrossRef]
- Qian, M.S.; Jiang, B.; Xu, D.Z. Fault tolerant control scheme design for the formation control system of unmanned aerial vehicles. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2013, 227, 626–634. [Google Scholar] [CrossRef]
- Wang, Y.C.; Wang, Z.P.; Zhang, L.; Liu, M.C.; Zhu, J.N. Lateral stability enhancement based on a novel sliding mode prediction control for a four-wheel-independently actuated electric vehicle. Iet. Intell. Transp. Syst. 2019, 13, 124–133. [Google Scholar] [CrossRef]
- Zhang, H.Z.; Liang, J.S.; Jiang, H.B.; Cai, Y.F.; Xu, X. Stability Research of Distributed Drive Electric Vehicle by Adaptive Direct Yaw Moment Control. IEEE Access 2019, 7, 106225–106237. [Google Scholar] [CrossRef]
- Mousavinejad, E.; Han, Q.L.; Yang, F.W.; Zhu, Y.; Vlacic, L. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control. Veh. Syst. Dyn. 2017, 55, 268–294. [Google Scholar] [CrossRef]
- Bagheri, A.; Azadi, S.; Soltani, A. A combined use of adaptive sliding mode control and unscented Kalman filter estimator to improve vehicle yaw stability. Proc. Inst. Mech. Eng. Part K-J. Multi-Body Dyn. 2017, 231, 388–401. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, Z. Vehicle Yaw Stability-Control System Design Based on Sliding Mode and Backstepping Control Approach. IEEE Trans. Veh. Technol. 2010, 59, 3674–3678. [Google Scholar] [CrossRef]
- Zhifu, W.; Yang, Z.H.; Chaopeng, L.I.; Jun, F. Research on Straight Line Stability Control Strategy of Four Wheel Drive Vehicle Based on the Sliding Mode Variable Structure Control and Optimization Algorithm. In Proceedings of the Applied Energy Symposium and Summit-Low-Carbon Cities and Urban Energy Systems (CUE), Jinan Assoc Sci & Technol, Jinan, China, 13–15 June 2016; pp. 342–347. [Google Scholar]
- Le, A.T.; Chen, C.K. Vehicle stability control by using an adaptive sliding-mode algorithm. Int. J. Veh. Des. 2016, 72, 107–131. [Google Scholar] [CrossRef]
- Wang, H.; Han, J.; Zhang, H. Lateral Stability Analysis of 4WID Electric Vehicle Based on Sliding Mode Control and Optimal Distribution Torque Strategy. Actuators 2022, 11, 244. [Google Scholar] [CrossRef]
- Zhang, F.; Xiao, H.; Zhang, Y.; Gong, G. Distributed Drive Electric Bus Handling Stability Control Based on Lyapunov Theory and Sliding Mode Control. Actuators 2022, 11, 85. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, F.; Zhang, Y.; Su, L.; Gong, G. Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Nonsingular Fast Terminal Sliding Mode Control. Machines 2022, 10, 969. [Google Scholar] [CrossRef]
- Farroni, F.; Russo, M.; Russo, R. A combined use of phase plane and handing diagram method to study the influence of tyre and vehicle characteristics on stability. Veh. Syst. Dyn. 2013, 51, 1265–1285. [Google Scholar] [CrossRef]
- Vignati, M.; Sabbioni, E.; Cheli, F. A torque vectorring control for enhancing vehicle performance in drifting. Electronics 2018, 7, 394. [Google Scholar] [CrossRef]
- Cui, Y.Y.; Wang, Y. Overview vehicle pedestrian protection technology. Sci. Technol. Inf. 2017, 15, 214–215. [Google Scholar]
- Zhu, S.; Wei, B.; Liu, D.; Chen, H.; Huang, X.; Zheng, Y.; Wei, W.A. Dynamics Coordinated Control System for 4WD-4WS Electric Vehicles. Electronics 2022, 11, 3731. [Google Scholar] [CrossRef]
- Zhong, L.F.; Peng, Y.H.; Jiang, M. Stability control of distributed driven electric vehicle based on phase plane. Automot. Eng. 2021, 43, 721–729. [Google Scholar]
- Zhou, B.; Liu, Y.Y.; Wu, X.J. Integrated control of active front steering and direct yaw moment. J. Zhejiang Univ. (Eng. Sci.) 2022, 56, 2330–2339. [Google Scholar]
- Liu, X.C.; Liu, J.; Li, H.J. Research on direct yaw moment control of vehicle based on phase plane method. J. Hefei Univ. Technol. (Nat. Sci.) 2019, 42, 1455–1461. [Google Scholar]
- Rajamani, R.; Piyabongkarn, D. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Trans. Intell. Transp. Syst. 2013, 14, 249–261. [Google Scholar] [CrossRef]
- Lu, C.; Yuan, J.; Zha, G.L. Sliding Mode Integrated Control for Vehicle Systems Based on AFS and DYC. Math. Probl. Eng. 2020, 2020, 8. [Google Scholar] [CrossRef]
- Latin American and Caribbean New Car Assessment Programme (Latin NCAP) Testing Protocols, Version 1.0.0. [S/OL]; Latin NCAP: Leuven, Belgium, 2020.
- Gong, T.X.; Xie, X.Y. A control strategy of vehicle electronic stability based on phase plane method. J. Transp. Inf. Saf. 2019, 37, 83–90. [Google Scholar]
- Xiong, L.; Qu, T.; Feng, Y.; Deng, L.H. Stability Criterion for the Vehicle under Critical Driving Situation. J. Mech. Eng. 2015, 51, 103–111. [Google Scholar] [CrossRef]
- Unger, N.J.; Ombuki-Berman, B.M.; Engelbrecht, A.P. Cooperative Particle Swarm Optimization in Dynamic Environments. In Proceedings of the IEEE Symposium on Swarm Intelligence (SIS), Singapore, 16–19 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 172–179. [Google Scholar]
- Xu, X.Y.; Li, G.Y.; Tao, S.Y.; Zhang, H. Simulation and Analysis on Longitudinal and Lateral Slipping Energy Consumption of Four-wheel Independently Driven Electric Vehicle Tires. J. Mech. Eng. 2021, 57, 92–102. [Google Scholar]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| µ | c | k |
|---|---|---|
| 0.3 | 0.08 | −1.68 |
| 0.4 | 0.10 | −2.02 |
| 0.5 | 0.13 | −2.39 |
| 0.6 | 0.15 | −2.83 |
| 0.7 | 0.18 | −2.86 |
| 0.8 | 0.20 | −3.03 |
| 0.9 | 0.23 | −3.36 |
| 1.0 | 0.27 | −3.79 |
| Controller Parameters | cω | εω |
|---|---|---|
| Optimization results | 93.2007 | 9.9821 |
| Controller Parameters | cβ | εβ |
|---|---|---|
| Optimization results | 46.1308 | 3.0325 |
| Parameter | Unit | Value |
|---|---|---|
| Vehicle weight | kg | 1530 |
| Distance between the front axle and the center of mass | m | 1.2 |
| Distance between the front axle and the center of mass | m | 1.4 |
| Inertia of vehicle around z-axis | kg m2 | 2500.6 |
| Front and rear axle wheel track | m | 1.65 |
| Height of vehicle center of mass | m | 0.6 |
| Effective radius of wheel | m | 0.33 |
| Longitudinal cornering stiffness | N/rad | 40,000 |
| Lateral cornering stiffness | N/rad | 50,000 |
| Parameter | Value |
|---|---|
| 93.2007 | |
| 46.1308 | |
| 9.9821 | |
| 3.0325 | |
| 0.43 | |
| 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Zhang, J.; Yin, X. Adaptive Sliding Mode Control for Yaw Stability of Four-Wheel Independent-Drive EV Based on the Phase Plane. World Electr. Veh. J. 2023, 14, 116. https://doi.org/10.3390/wevj14050116
Zhou Z, Zhang J, Yin X. Adaptive Sliding Mode Control for Yaw Stability of Four-Wheel Independent-Drive EV Based on the Phase Plane. World Electric Vehicle Journal. 2023; 14(5):116. https://doi.org/10.3390/wevj14050116
Chicago/Turabian StyleZhou, Zhigang, Jie Zhang, and Xiaofei Yin. 2023. "Adaptive Sliding Mode Control for Yaw Stability of Four-Wheel Independent-Drive EV Based on the Phase Plane" World Electric Vehicle Journal 14, no. 5: 116. https://doi.org/10.3390/wevj14050116
APA StyleZhou, Z., Zhang, J., & Yin, X. (2023). Adaptive Sliding Mode Control for Yaw Stability of Four-Wheel Independent-Drive EV Based on the Phase Plane. World Electric Vehicle Journal, 14(5), 116. https://doi.org/10.3390/wevj14050116